

单独伺服扫描
组件和用品
 |
| × | 1 | |||
 =fffb> =fffb> |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
关于这个项目
介绍
Solo 有很好的开发环境,但缺乏 I/O。目前附件端口分为 CAN、Mavlink Serial to Pixhawk 和 USB to Sololink(imx6)。通过使用 arduino,firmata 可以添加自定义传感器、控制伺服系统、闪烁 LED 或任何其他 arduino 功能。
本教程将引导您完成使用带有 Solo 的 arduino 来控制伺服的步骤。
软件先决条件:
- 单独更新 1.2.0 或更高版本
- Arduino IDE
- 文件目录
- Putty 或任何其他 SSH 客户端
步骤 1:将 Firmata 主机上传到 Arduino Uno
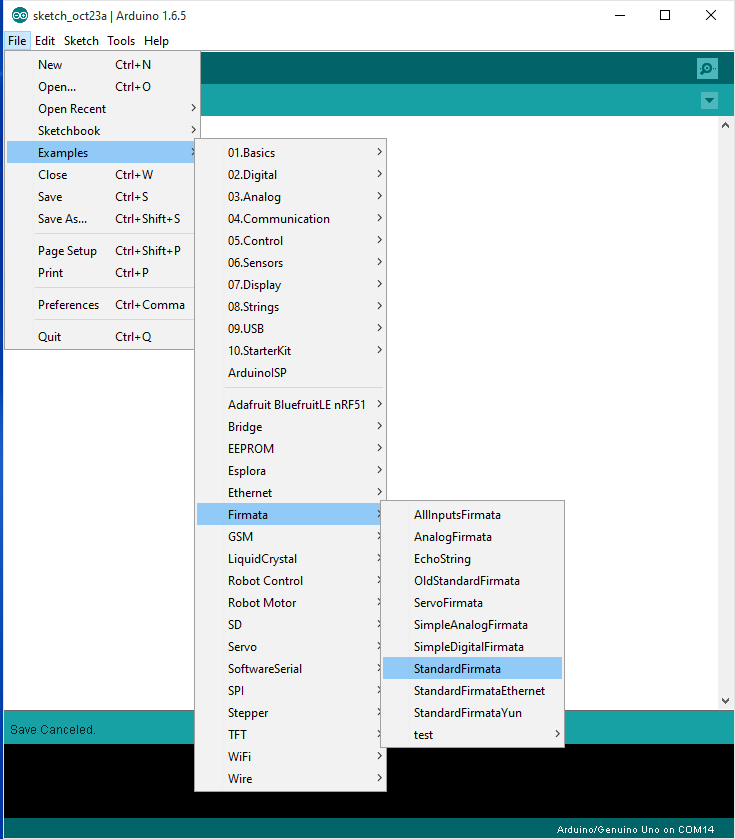
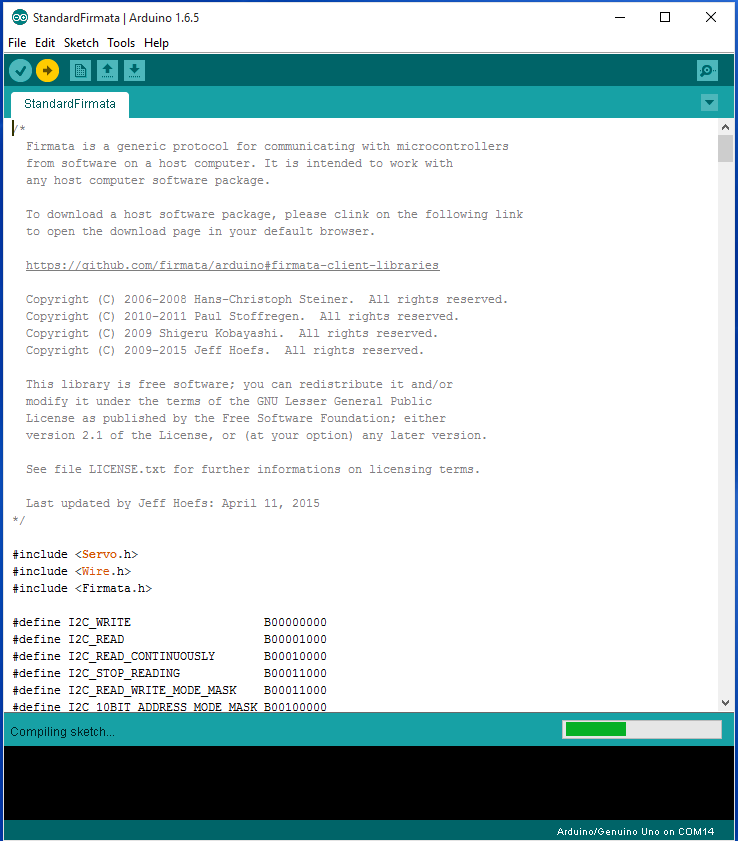
从示例选项卡中打开 StandardFirmata。选择板卡和端口。上传!
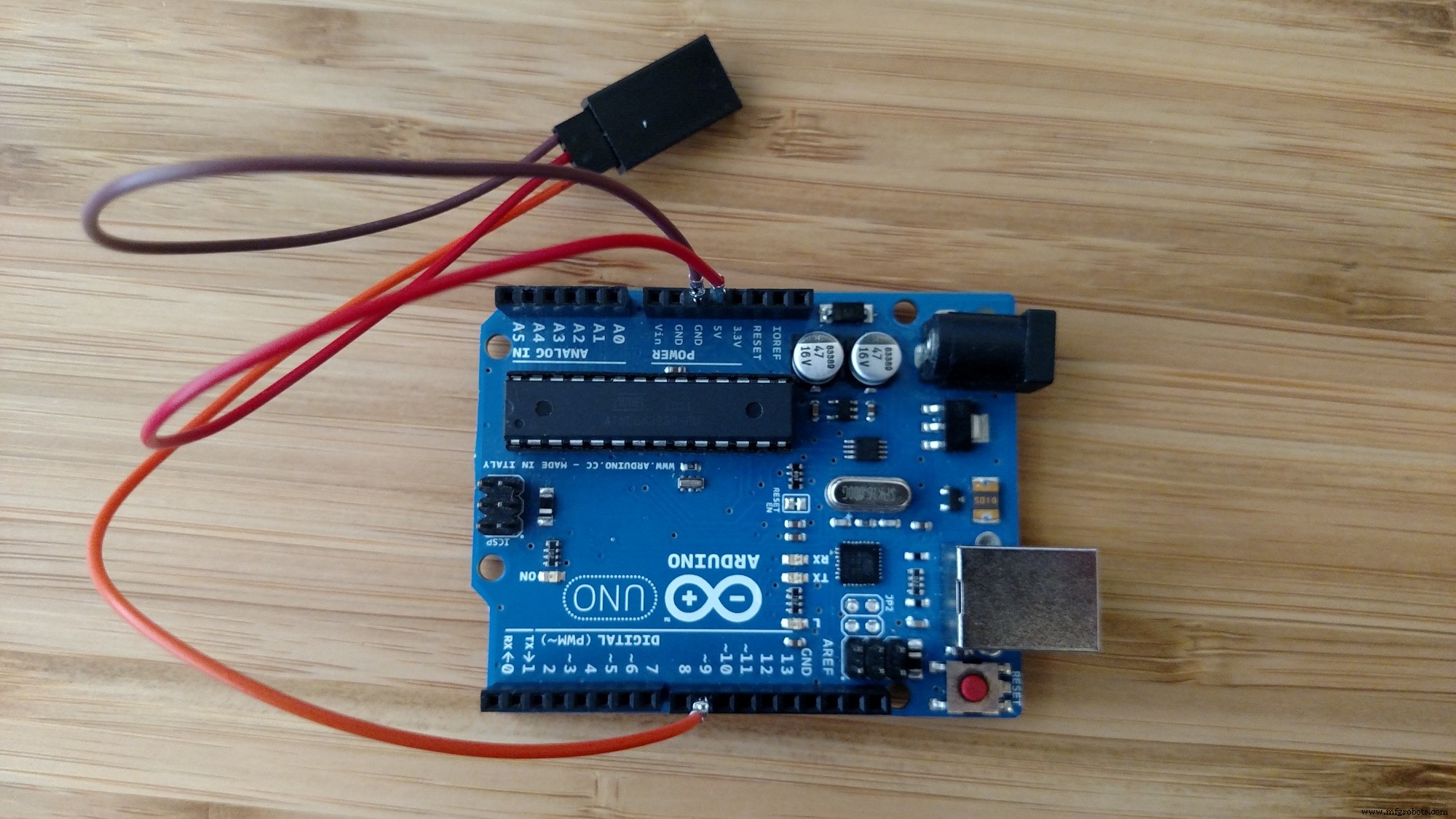
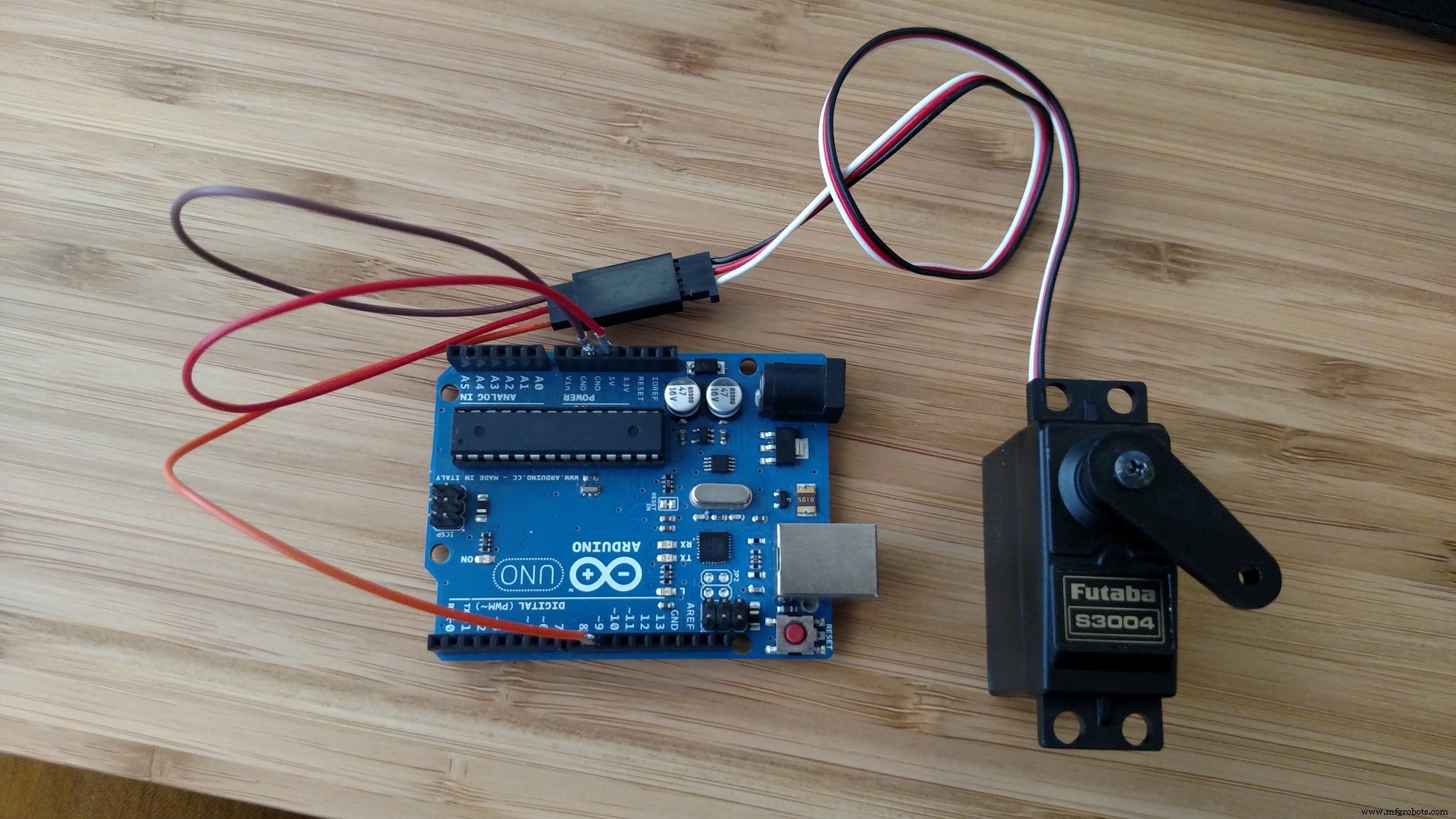
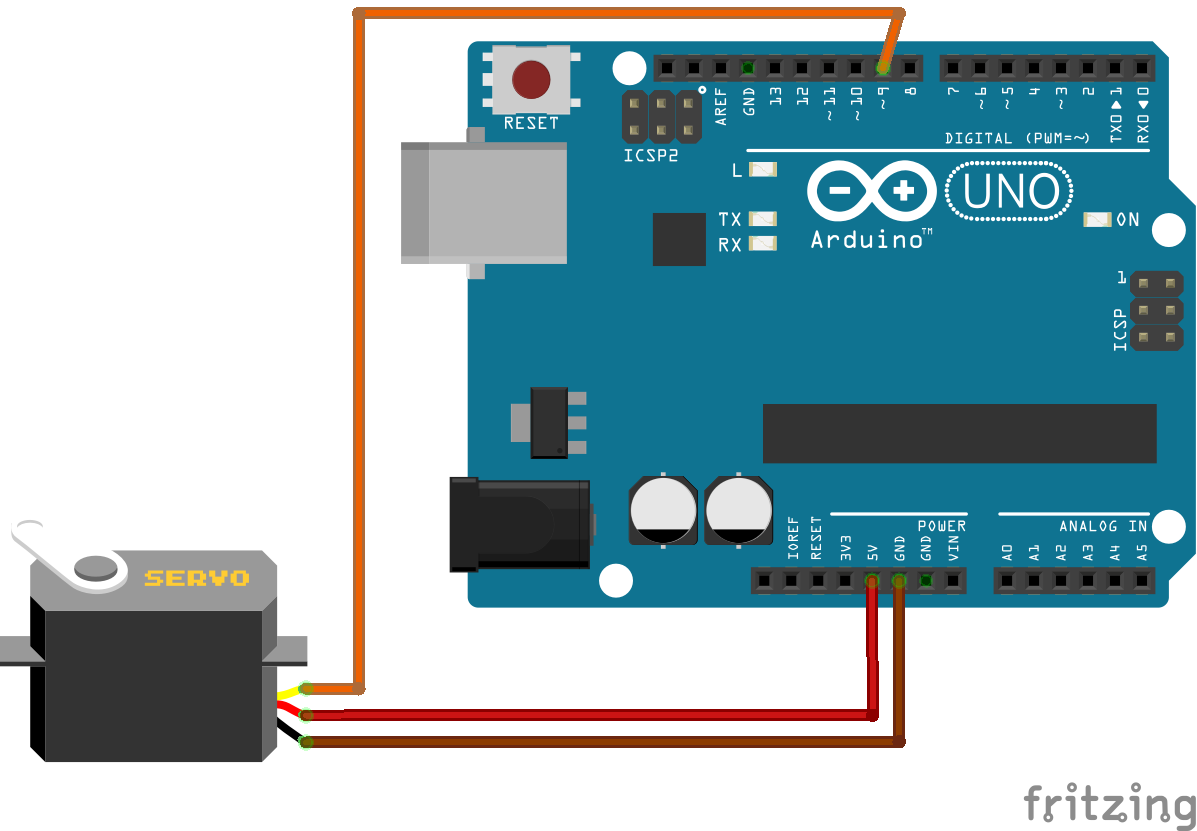
第 2 步:硬件设置
零件



注意:此时不出售分线板。请参考这里
组装



开机

第二步:下载pyMata和代码
pyMata
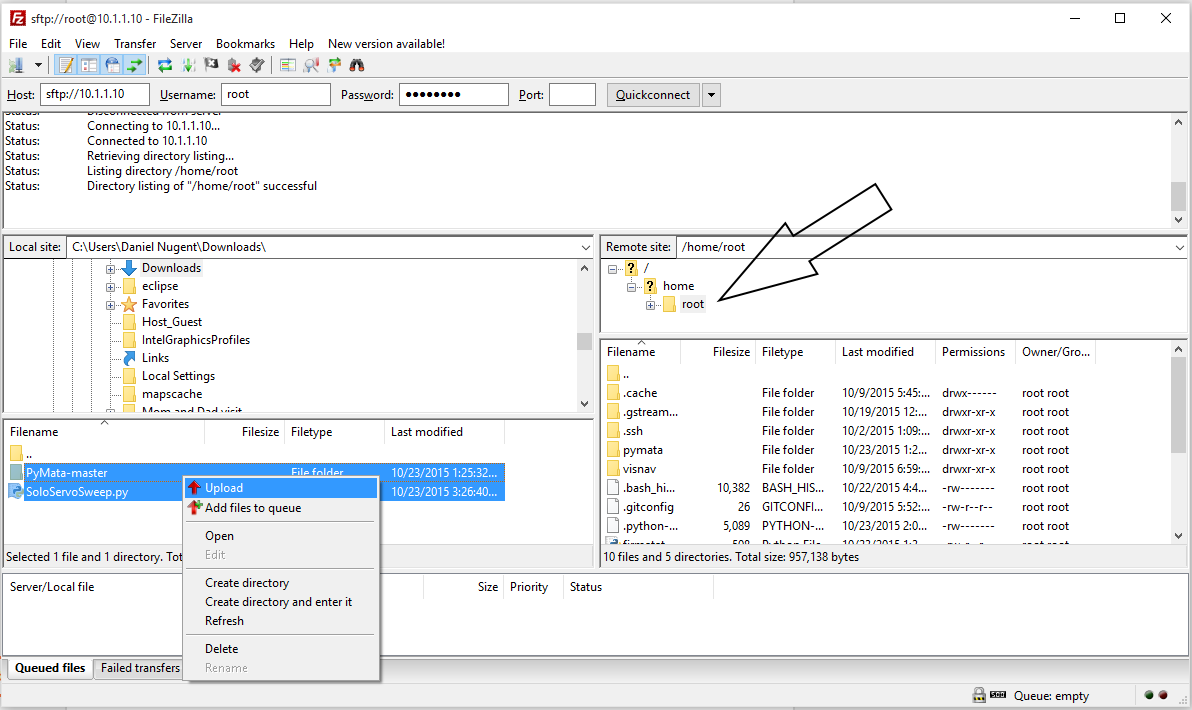
SoloServoSweep.py第 3 步:将文件传输到 Solo
- 连接到 Solo 的 Wifi 网络!
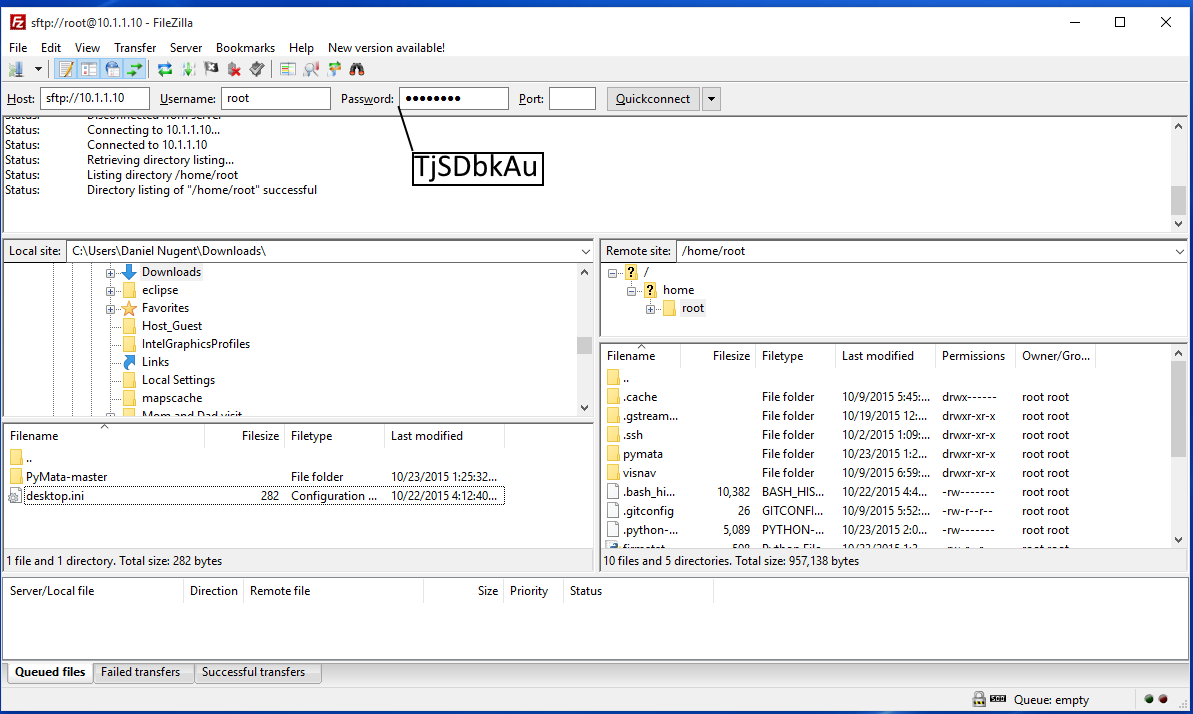
第 4 步:SSH 进入 Solo
使用您操作系统的 SSH 客户端通过 SSH 连接到 Solo。对于 Windows,我们将使用 Putty。
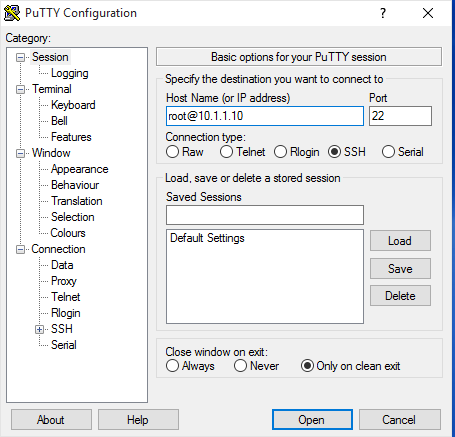
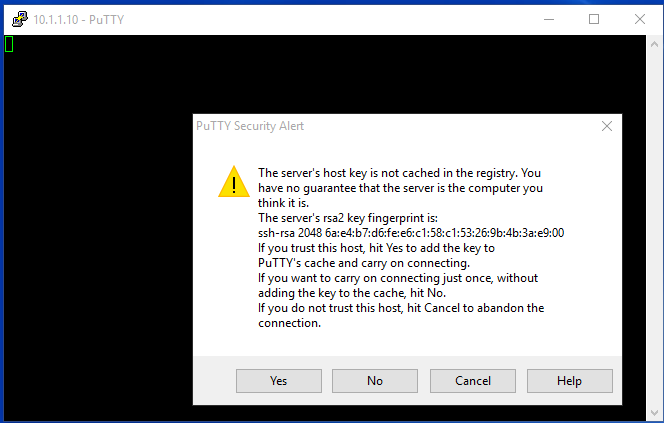
确保您仍然连接到 Solo 的 Wifi!
查看照片说明了解更多详情
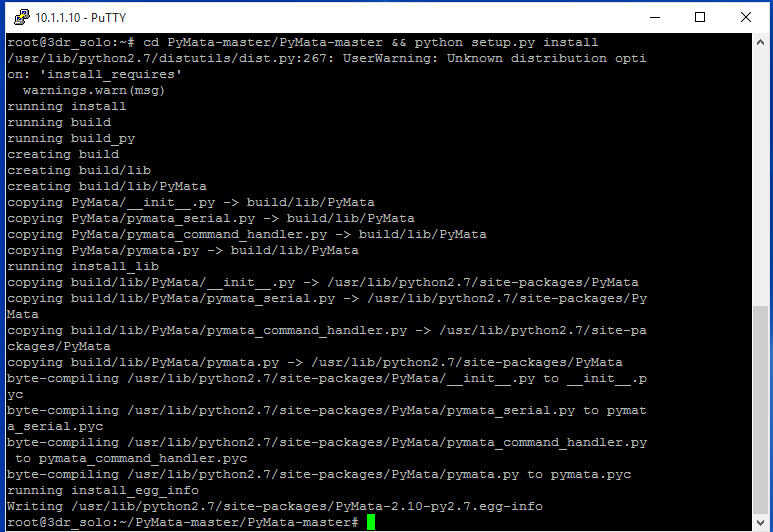
第五步:安装pyMata
在 SSH 会话中运行此命令:
这应该是你的结果
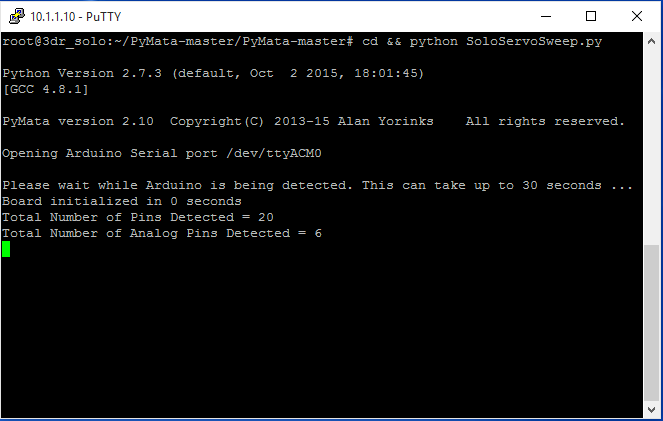
第 7 步:运行示例
当您的 ssh 会话仍然打开时:
代码
- SoloServoSweep.py
SoloServoSweep.pyPython
在 python 中驱动一个伺服 from Solofrom PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # 伺服连接到这个 pinEND =170 # 最大伺服行程 # 创建一个 PyMata instanceboard =PyMata("/dev/ttyACM0")# configure pin asservoboard.servo_config(SERVO_MOTOR)try:while True:for i in range (0,END):#扫描 board.analog_write(SERVO_MOTOR, i) time.sleep(.015) for i in range (END,0,- 1):#扫描board.analog_write(SERVO_MOTOR, i) time.sleep(.015)except KeyboardInterrupt:board.close() sys.exit() 定制零件和外壳
单人分线板
3DR Solo 配件端口分线板https://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1示意图
制造工艺