

机电一体化最后一年项目
这是我的机电一体化最后一年项目 在斯科普里的机械工程学院。它的目标是开发一种能够实现真实手臂运动与 3D 计算机模型交互的设备。我在一个设备中集成了三个不同的领域,t.e.机械、电气和计算机工程:
在下一个视频中,您可以看到该项目的演示。这是它的内容:
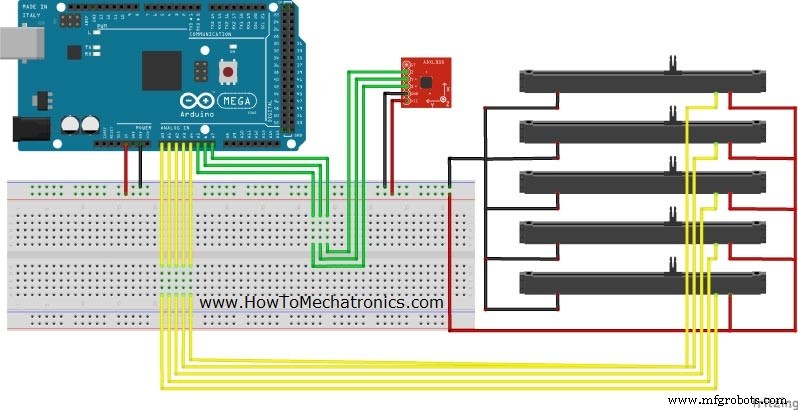
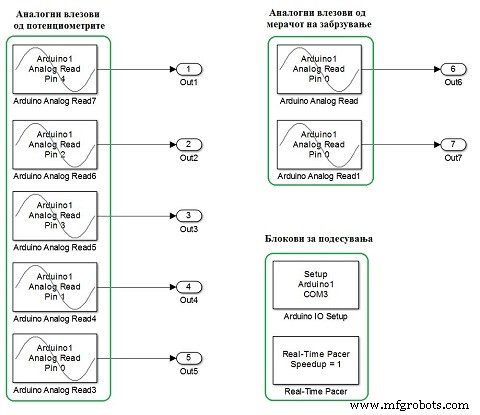
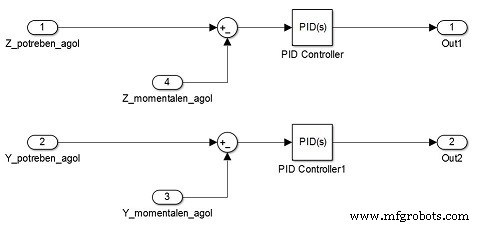
加速度计用于跟踪手臂的方向。随着手臂移动,来自加速度计的 X、Y 和 Z 轴的值会发生变化,并在 Arduino 板的模拟输入中读取。据他们说,3D 模型也会移动。
电位器用于跟踪手指的位置。我在每个电位器上都安装了一个弹簧(笔式弹簧)。弹簧将电位器滑块固定在某个位置,随着手指的移动,滑块被拉动,电位器的电阻发生变化。这些值正在 Arduino 板的模拟输入中读取,3D 模型的手指也会根据这些值移动。
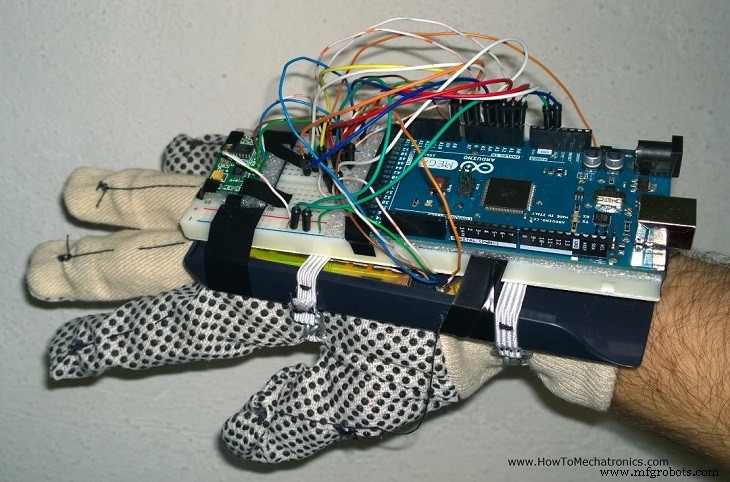
我用一个计算器的塑料盖作为底座,在上面安装了五个电位器。在它们上面我放了一个面包板,我用胶带把 Arduino 板和加速度计固定在上面。在下图中,您可以看到设备的最终外观。
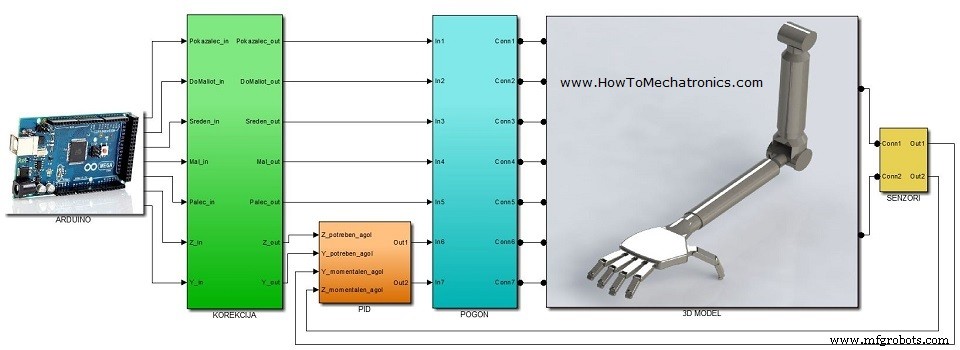
3D 模型是人类手臂的表示。首先,我使用 Solidworks 对其进行建模,然后使用 Matworks 的 SimMechanicsLink 将其传输到 Matlab / Simulink。
在构建 Simulink 模型之前,首先我必须安装包含 Simulink 库的 Arduino IO 包,以便与 Arduino 板进行通信。同样使用 Arduino IDE,我必须将代码上传到软件包随附的 Arduino 板上,以启用 Simulink 库。在这里强烈推荐我的 Matlab 和 Arduino IO 包教程,让您了解工作原理并查看代码。
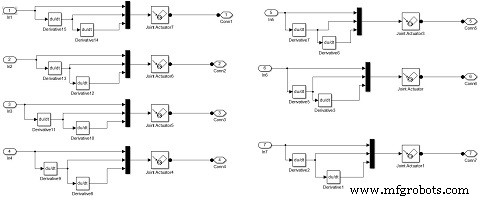
我将我的 Simulink 模型组织成六个子系统:
您可以在此处下载 Simulink 模型:
检查我对这个项目的扩展。
我将 Arduino Glove 重新编程为游戏控制器。
构建设备
本项目使用的零件


器件电路原理图
3D 模型

MATLAB / Simulink 模型

制造工艺