

在家制作 DIY 作业书写机
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
 |
|
应用和在线服务
 |
|
关于这个项目
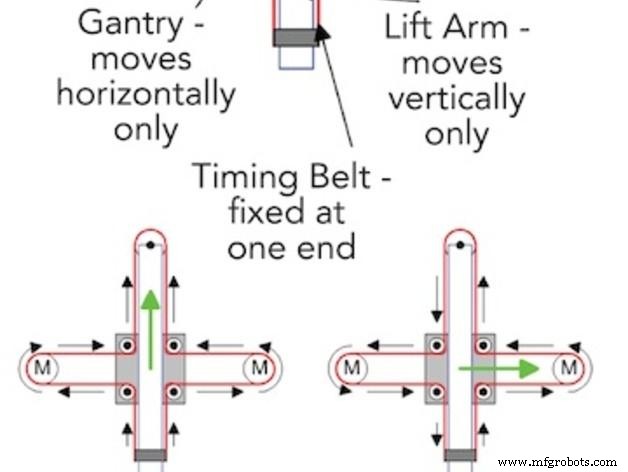
绘图机器人/笔式绘图仪/绘图机是著名机器 AxiDraw 的开放硬件版本,它是一款笔式绘图仪,能够在几乎任何平面上书写或绘图。它可以用钢笔、永久性记号笔、铅笔和其他书写工具书写,以应对无穷无尽的应用。
其独特的设计具有延伸到机器之外的书写头,可以在比机器本身更大的物体上绘图。该机最大的优点是可以放在书本上方,因为机器的核心XY延伸设计。
这种绘图机器人/钢笔绘图仪/绘图机类似于市售的 AxiDraw。它由 Arduino Uno 控制器供电,使用 CNC Shield 和 GRBL 固件
建造绘图机器人的成本在 75 美元之间,具体取决于您在哪里购买零件以及您是否已经拥有一些零件,例如 Arduino。
你可以在 https://www.diyprojectslab.com/
上找到我所有的项目最大绘图面积 24 * 30 CM。
谢谢NextPCB
本项目在NextPCB的帮助和支持下顺利完成。伙计们,如果您有 PCB 项目,请访问他们的网站并获得令人兴奋的折扣和优惠券。
包邮 0$ PCB 原型:https://www.nextpcb.com/pcb-quote?act=2&code=Romeo...
感恩节圣诞抽奖100%中奖:https://www.nextpcb.com/christmas-lucky-draw?code...
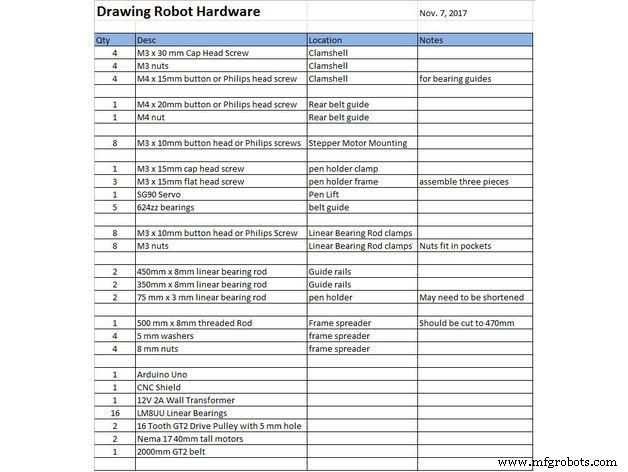
第 1 步:所需零件和材料

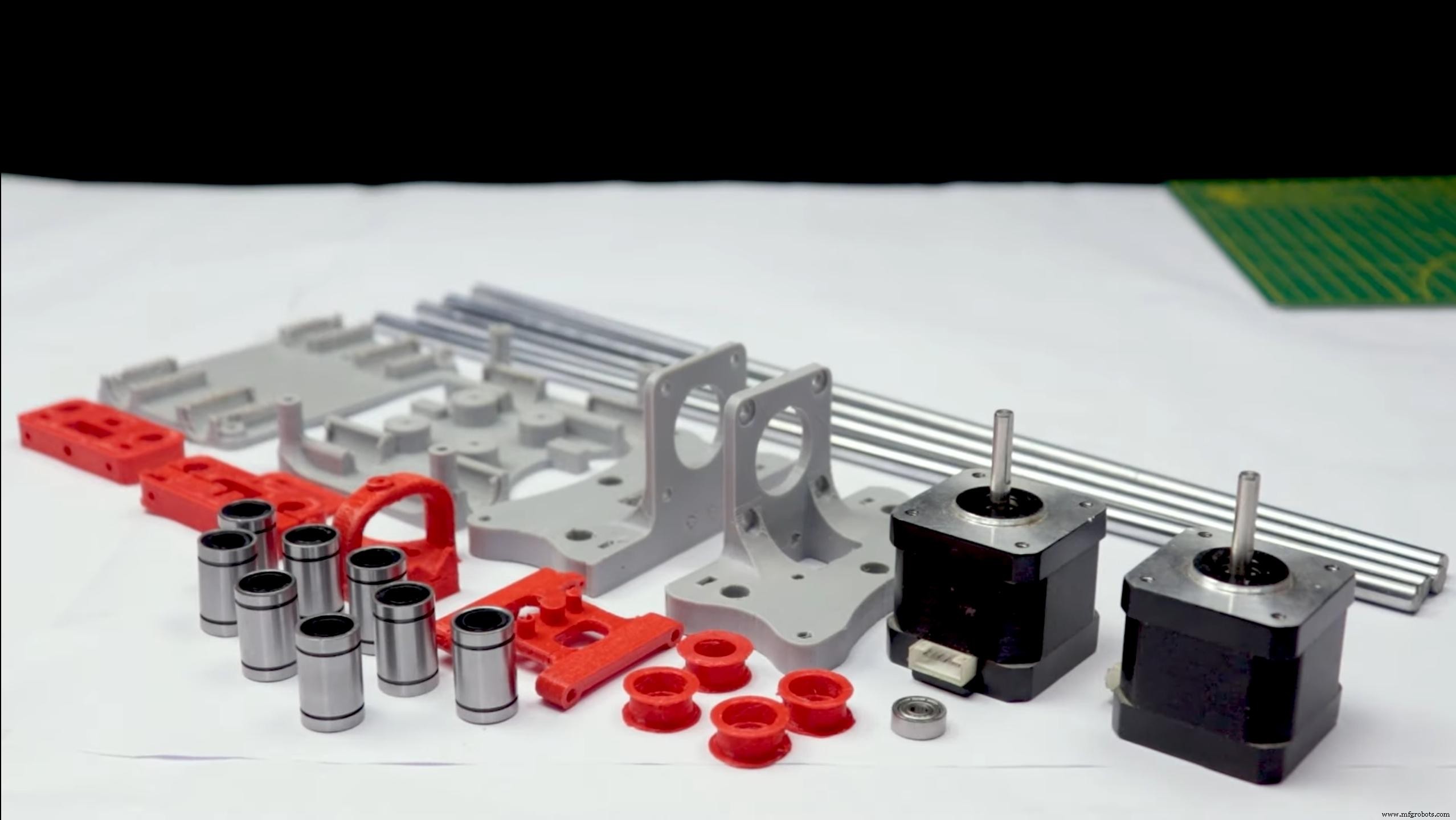
2 x Nema 17 步进电机 Amazon.com
2 x 线性杆 M8 x 450mm for X Axis Amazon.com
2 x 线性杆 M8 x 350mm 用于 Y 轴 Amazon.com
2 x 线性杆 3mm 用于 Z 轴(您可以从旧 CDROM 中获得)
1 x 螺纹杆 M8 x 480mm8 x LM8UU 轴承 Amazon.com
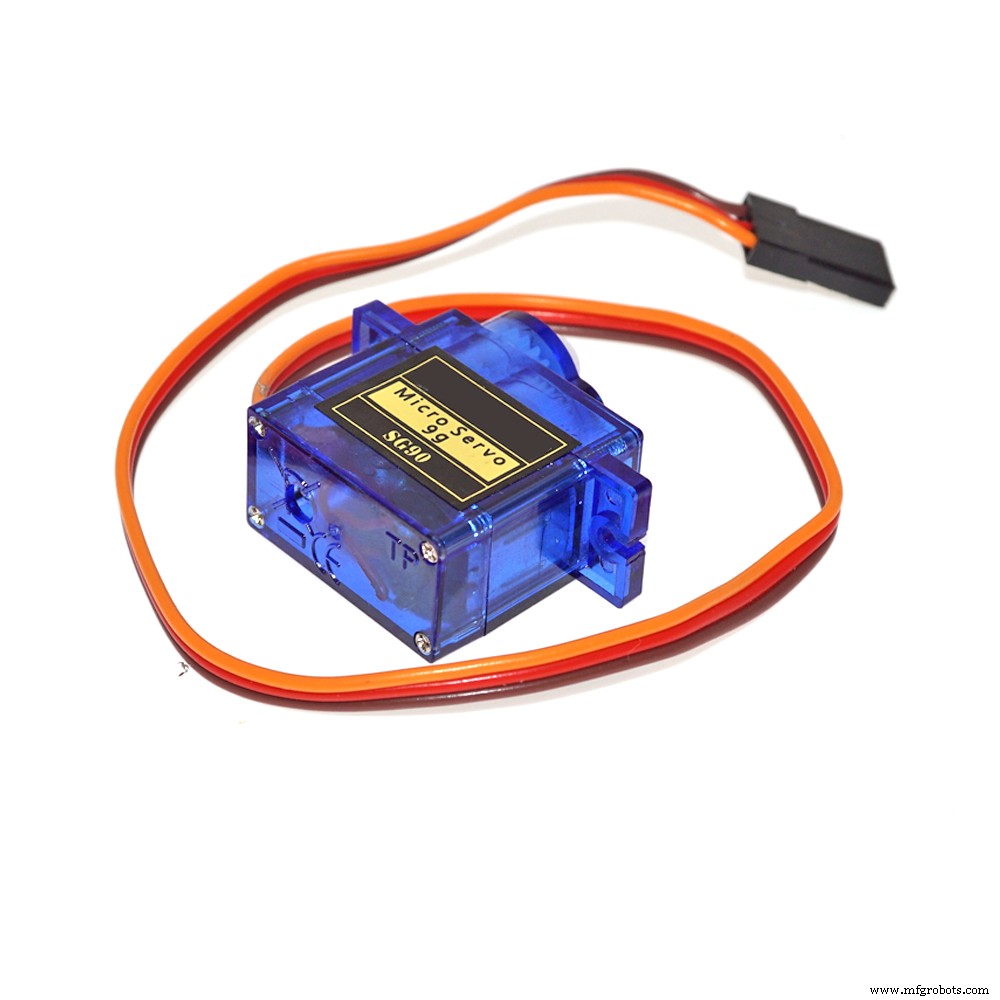
1 x Servo Sg901 x Spring 5m(来自圆珠笔)Amazon.com
2 x GT2 滑轮,16 齿 Amazon.com
5 x 轴承 624zz Amazon.com
1 x 2000mm GT2 腰带 Amazon.com
1 x Arduino Uno Amazon.com
1 x CNC Shield Amazon.com
2 x A4988 带散热器的步进驱动器 Amazon.com
6 x 跳线 Amazon.com
1 x 12V 2A 电源亚马逊
坚果
- 7 x M3-0.5
- 5 x M4-0.7
- 4 x 5/16in-18
亚马逊
螺丝
- 13 x 菲利普斯 M3-0.5 x 16 毫米
- 4 x Phillips M3-0.5 x 6mm
- 5 x Phillips M4-0.7x 35mm
- 1 x 六角 M3-0.5 x 20 毫米
垫圈
- 4 x 5/16 英寸垫圈
- 4 个 M3 垫圈
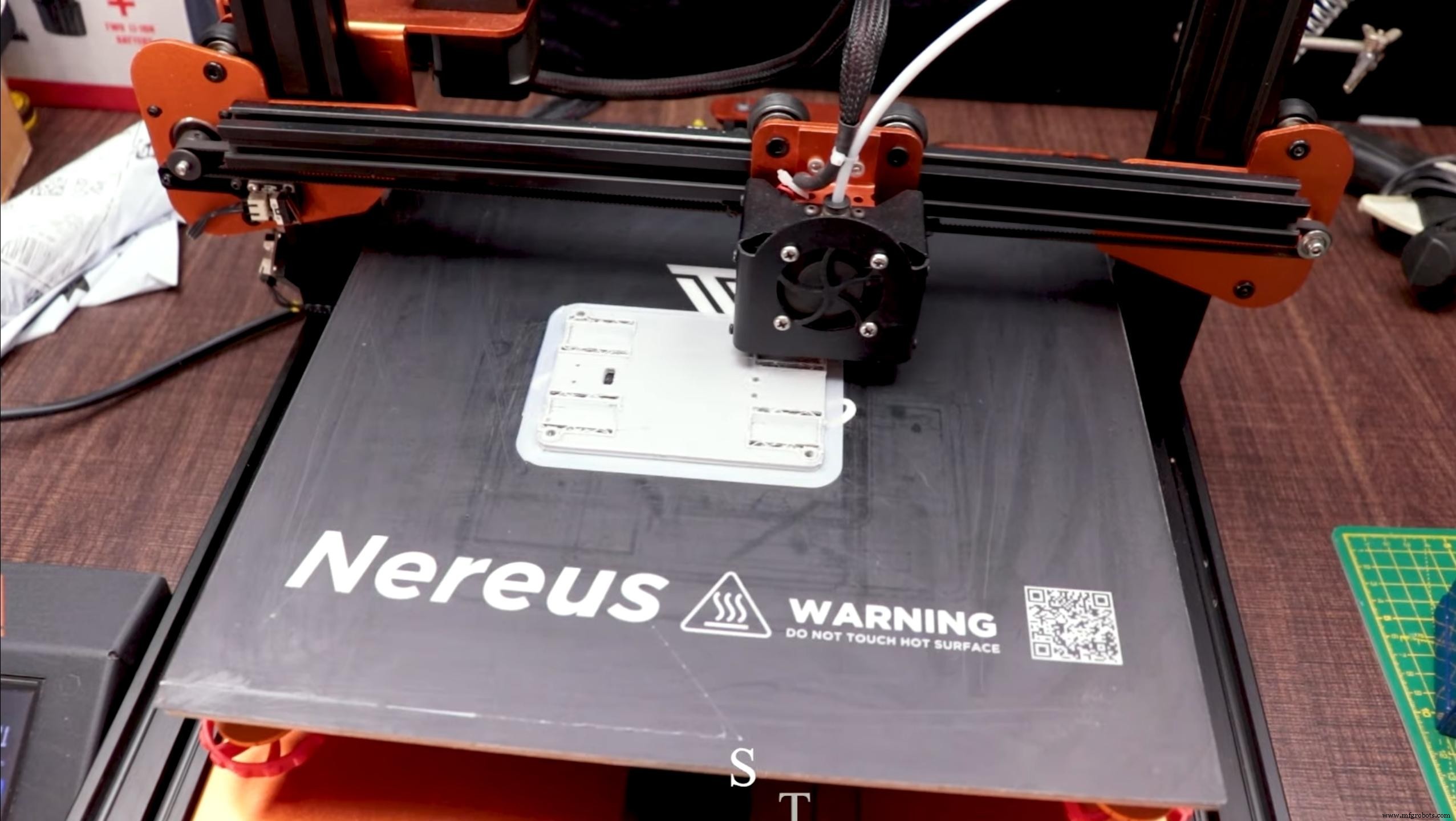
第 2 步:3D 打印

从 Thingiverse 下载文件
在 Cura 或任何其他切片器中打开 3D 模型。
在所有部件上使用 75% 的填充物(70-100% 的填充物也可以)
打印层高为 0.10 – 0.20 mm 的所有部件
PLA印刷
在 Penholder、Slider、X_Support_L 和 X_Support_R 上使用支撑
注意:最长的部分大约需要 10 小时,最短的部分需要 30 分钟来打印
PLA 适合这种设计。我在 BuildTak 上以 200C 打印。所有部件都不需要筏板或边缘。我建议只支持笔架和直立的Z轴端板。
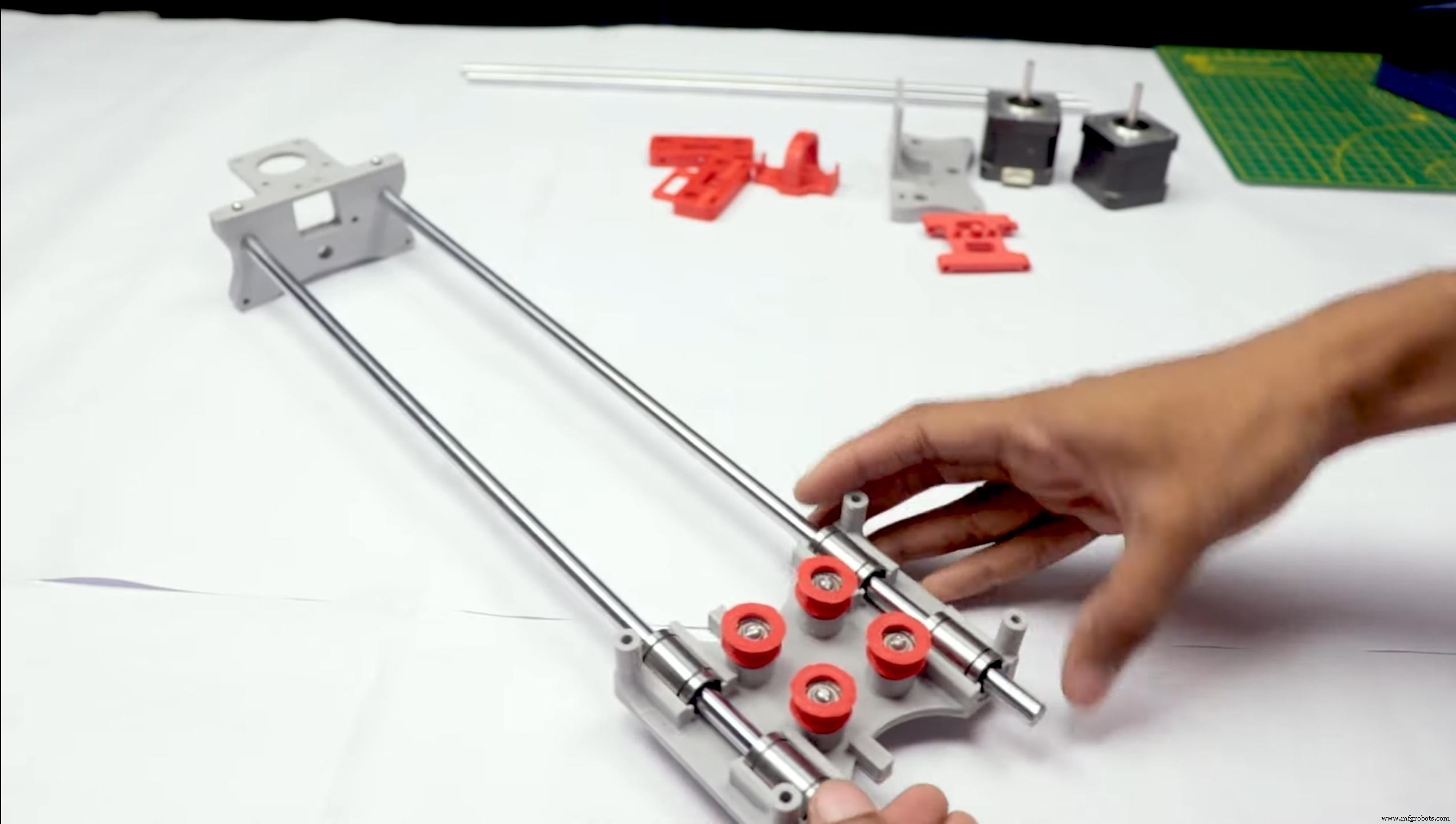
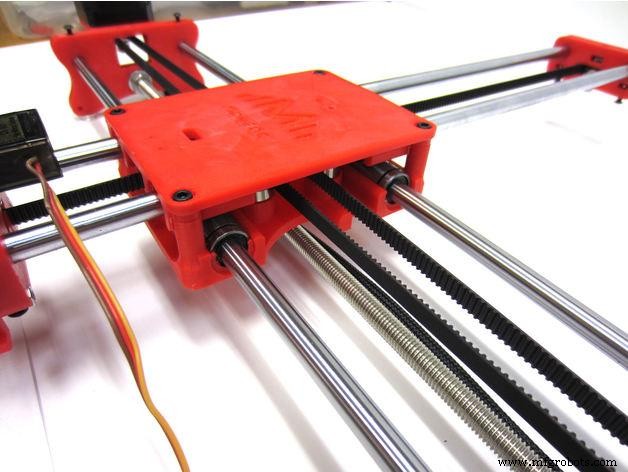
第 3 步:组装 X 轴
请记住,您需要 (2) 个 350mm 和 (2) 个 450mm 长的线性杆
取 (2) 450mm 线性杆并将它们插入任一 x 支撑部分
- 使用时可能需要使用圆锉来平滑插入它们的孔
- 此外,您可以使用橡皮槌来帮助插入杆
现在取出螺纹杆并将其插入下面的孔中。在 x 支撑部分的两侧送入 5/16in 垫圈和 5/16in 螺母
第 4 步:组装 X 轴轴承


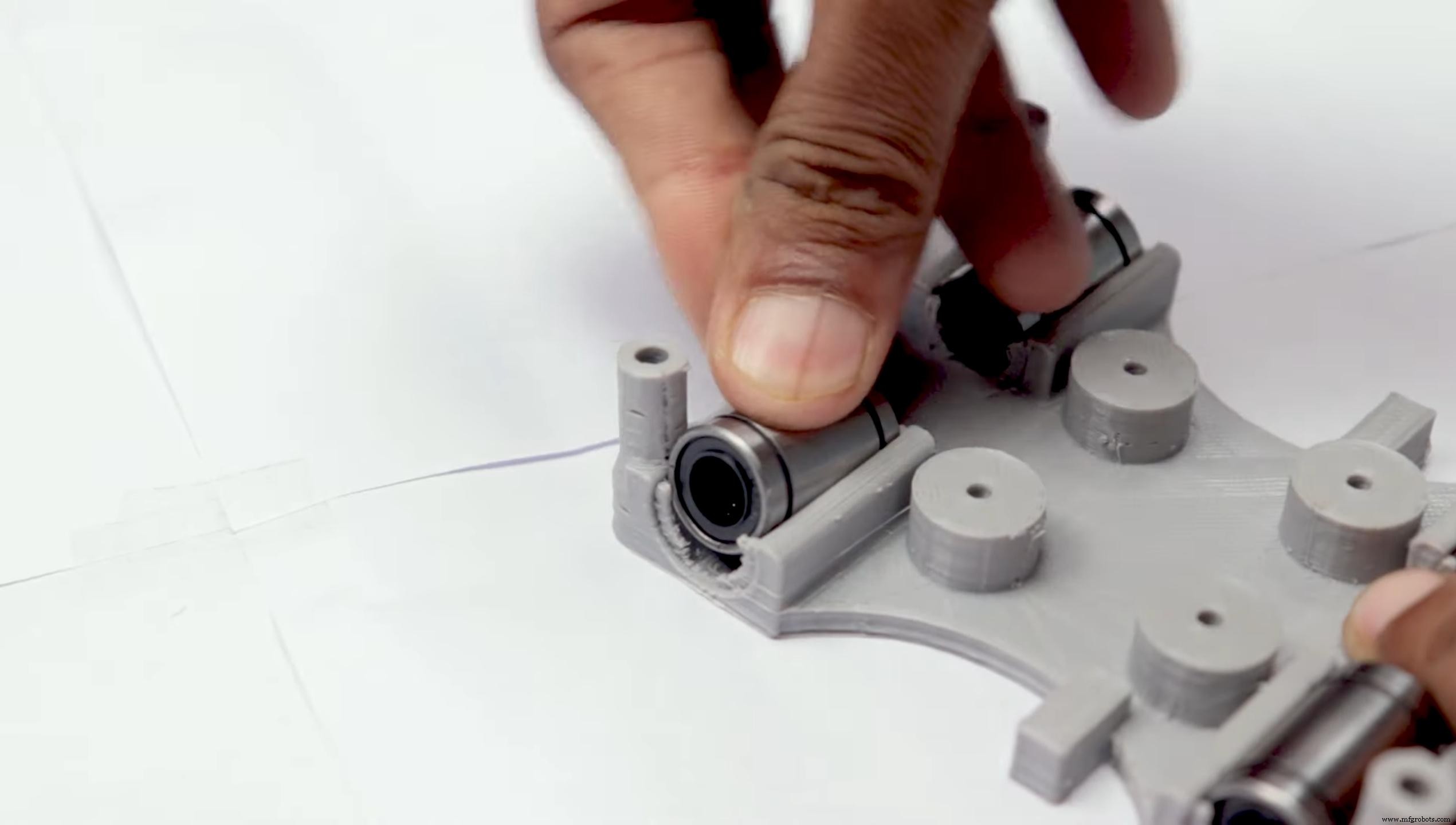


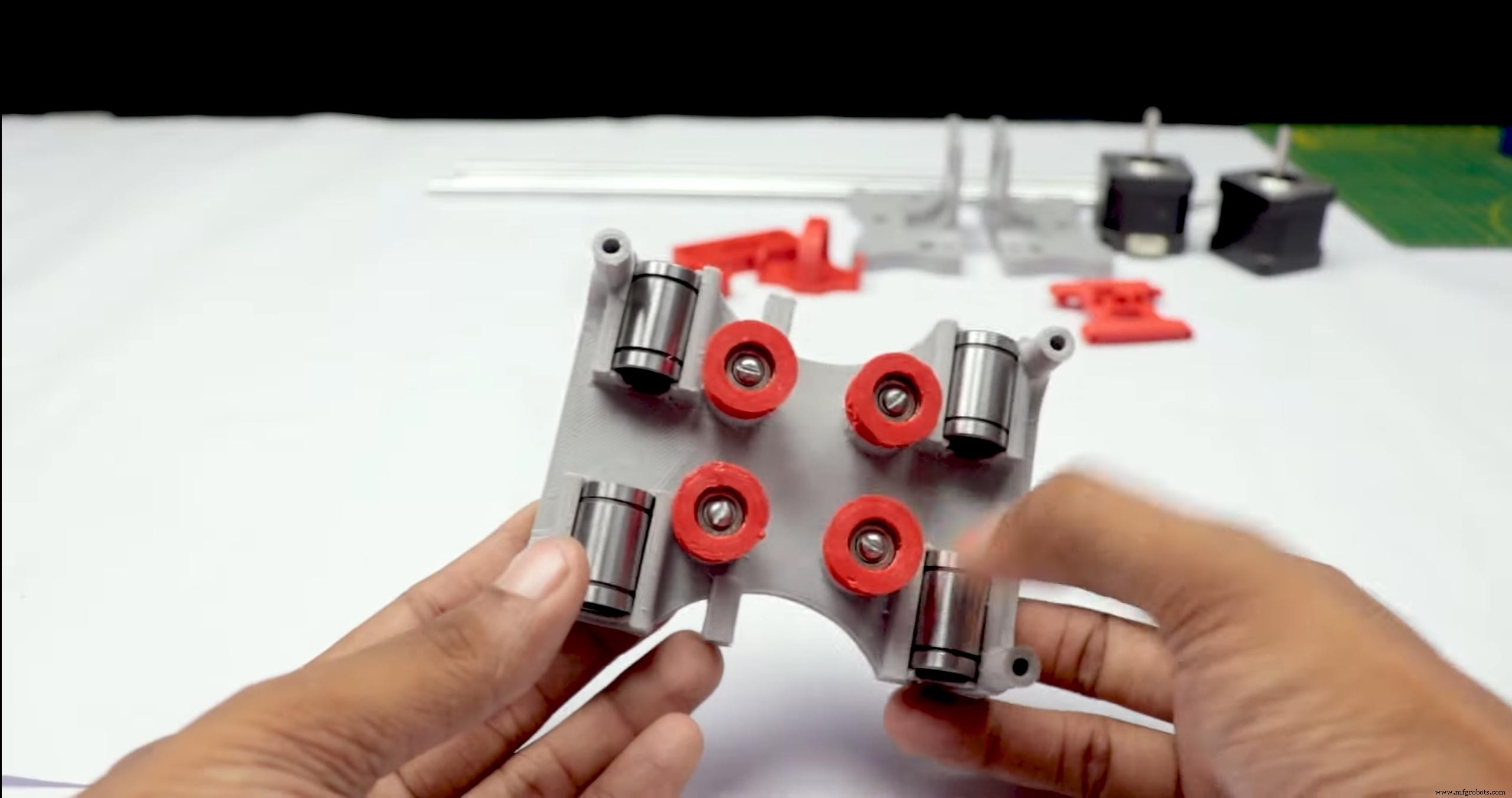
现在您想将 LM8UU 轴承推入顶部和底部翻盖上的位置(顶部和底部翻盖各带 (4) 个轴承)
取 (4) 个 624zz 轴承并将它们推过 3D 打印的惰轮。把第 5 个轴承留到以后组装 Y 轴时使用
组装 X 轴(托架)
- 获取 (4) 个 M3-0.5 x 20mm 螺钉、(4) 个 M3 螺母、(4) 个 M3 垫圈和 (4) 个安装惰轮的 624zz 轴承
- 拧下一个螺丝,将垫圈穿过它,垫圈将靠在轴承上。螺母将位于托架底部,用于将轴承固定到位
组装 X 轴(X 支撑)
- 将翻盖滑过 450 毫米(X 轴)线性杆
- 再次使用橡皮锤将最后一个 X 支撑固定在线性杆上
- 确保杆在两侧均匀伸出
- 将螺纹杆的另一端滑入 X 支架上的孔
- 装上最后一组螺母和垫圈以将 X 支撑固定到位
- 现在 X 轴已完成,您可以在每个 X 支架上使用 (2) 个 Phillips M3-0.5 x 16mm 螺钉来帮助防止线性杆滑动
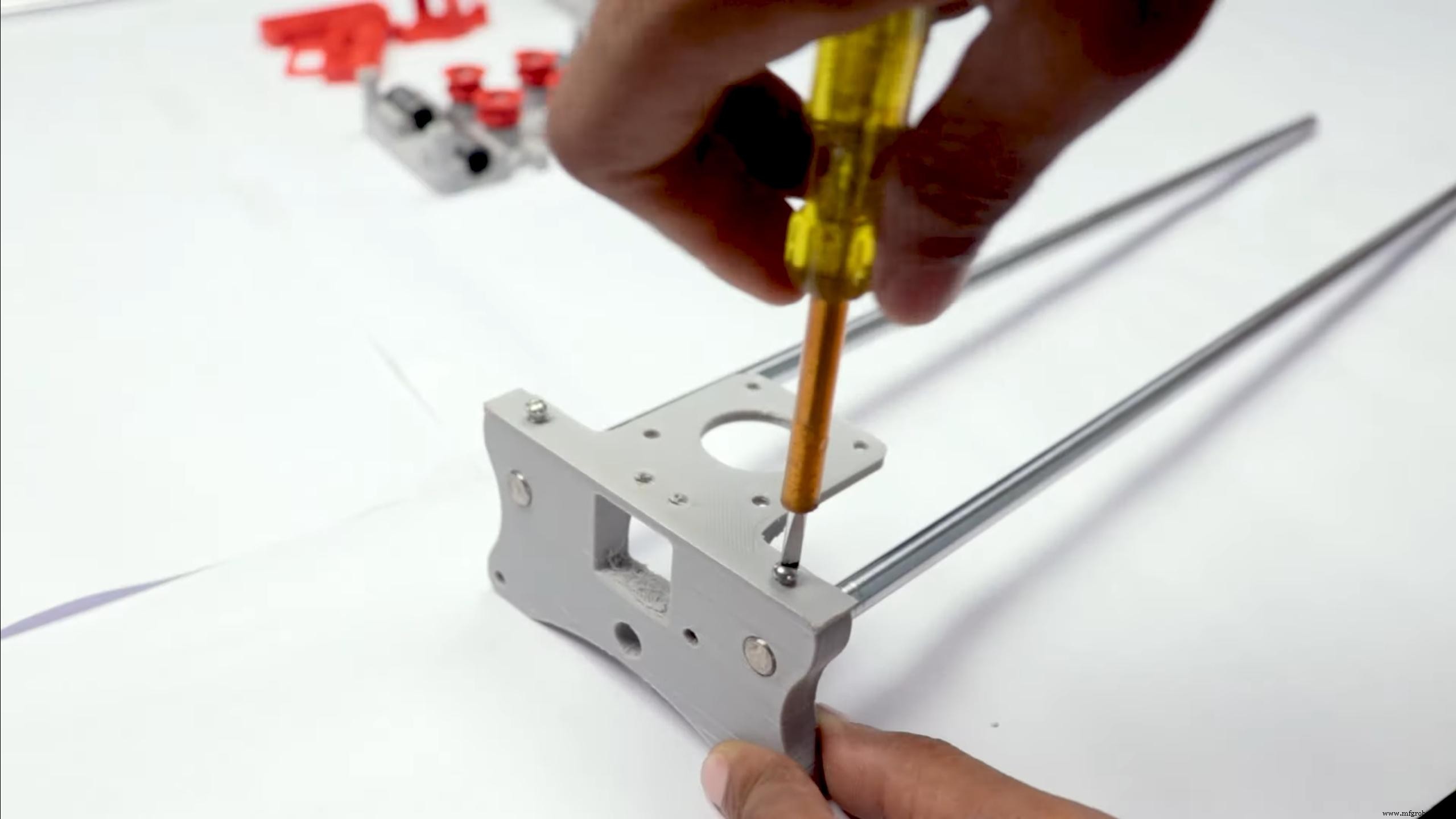
第 5 步:组装 Y 轴
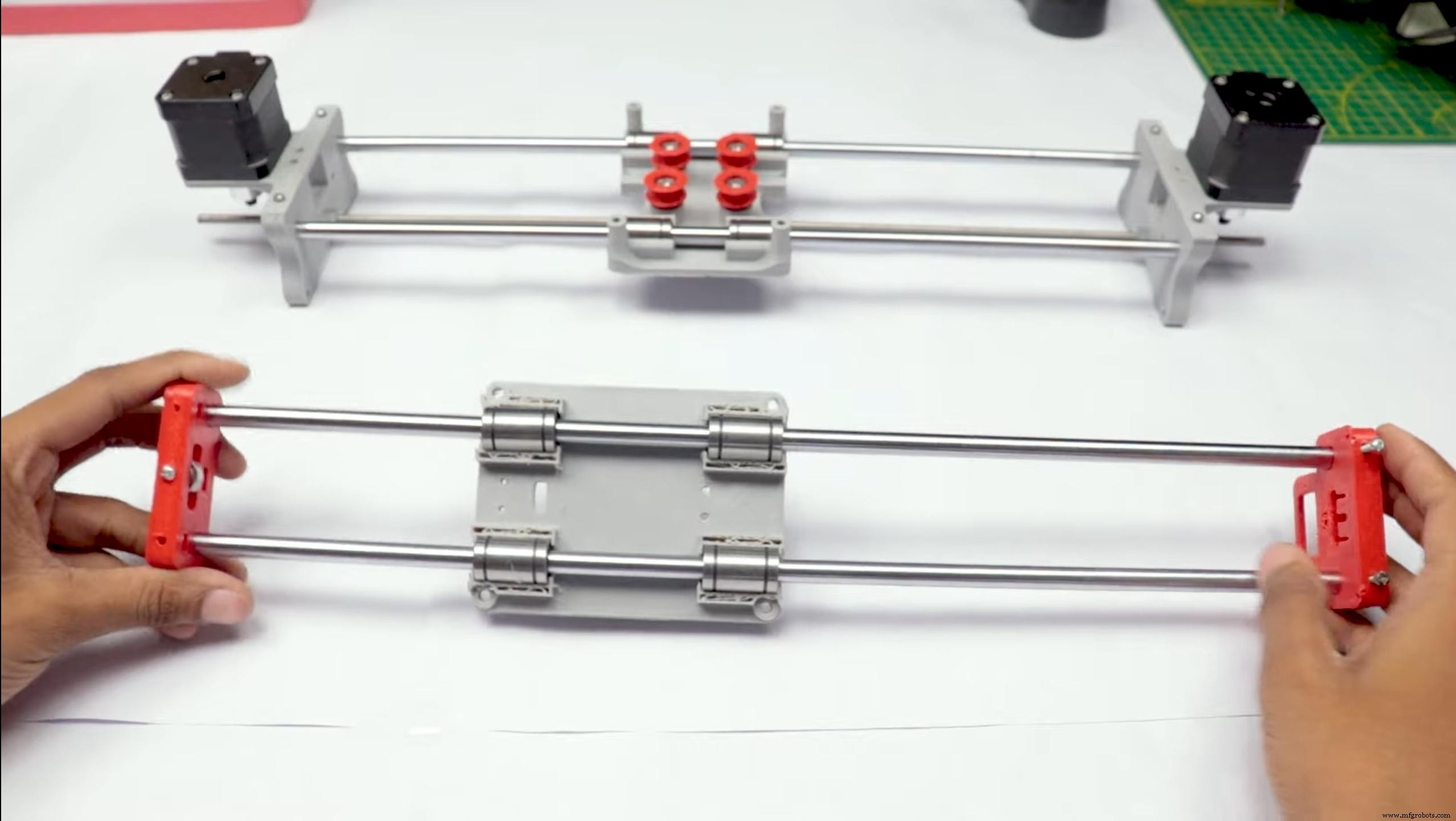
Y-返回
- 取出 (2) 根 350 毫米线性杆并使用橡胶槌将它们插入 Y 形背板
- 获得 (1) 个 M4-0.5 x 35 螺钉、(1) 个 M4 螺母和第 5 个 624zz 轴承
- 获取 (2) 个 M3-0.5 x 16 螺钉以固定线性杆
- 将螺钉插入 Y 形背板时将轴承滑入轴承
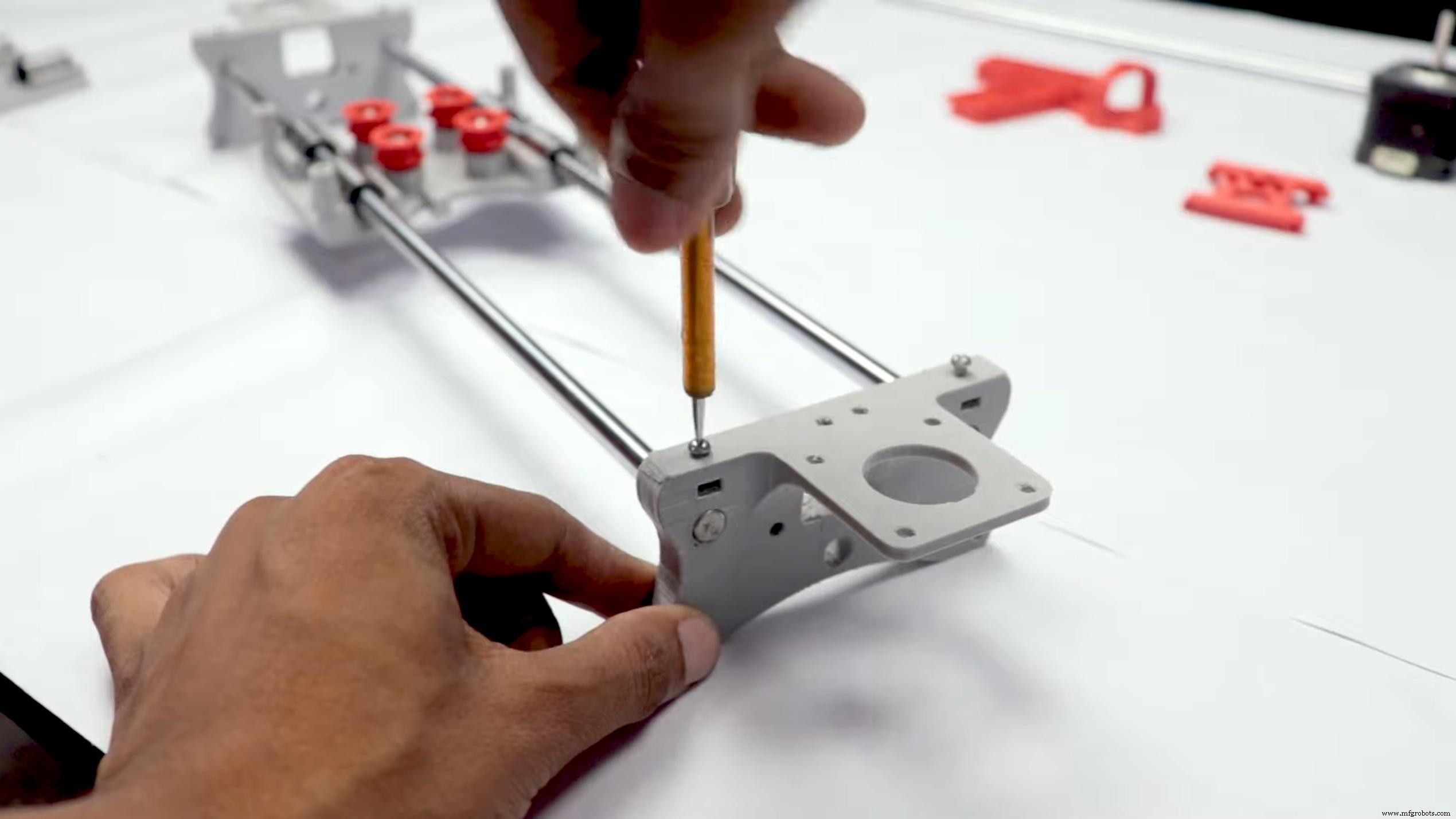
Y 型前
- 通过 LM8UU 轴承滑动线性杆/Y 型后部部件,并使用橡胶锤连接 Y 型前部部件
第 6 步:组装 X-Y 轴(带)

- 使用尖嘴钳帮助引导 GT2 腰带更轻松地穿过翻盖
- 拿起皮带的两端,将它们滑过底座滑块上的“齿”
- 腰带要紧而不松
- 请注意,一旦 GT2 皮带打开,翻盖不易移动是正常的
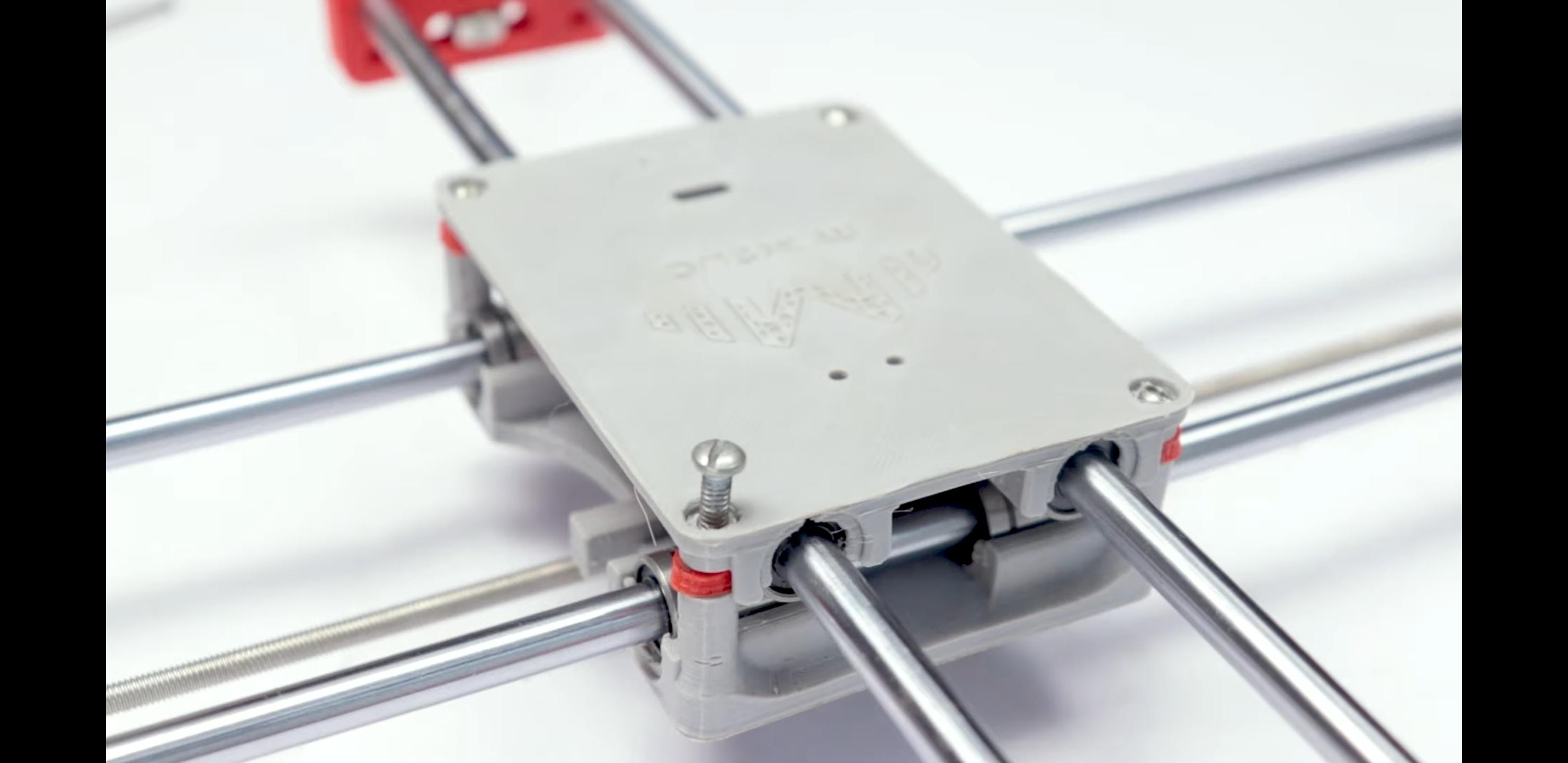
第 7 步:组装 Z 轴

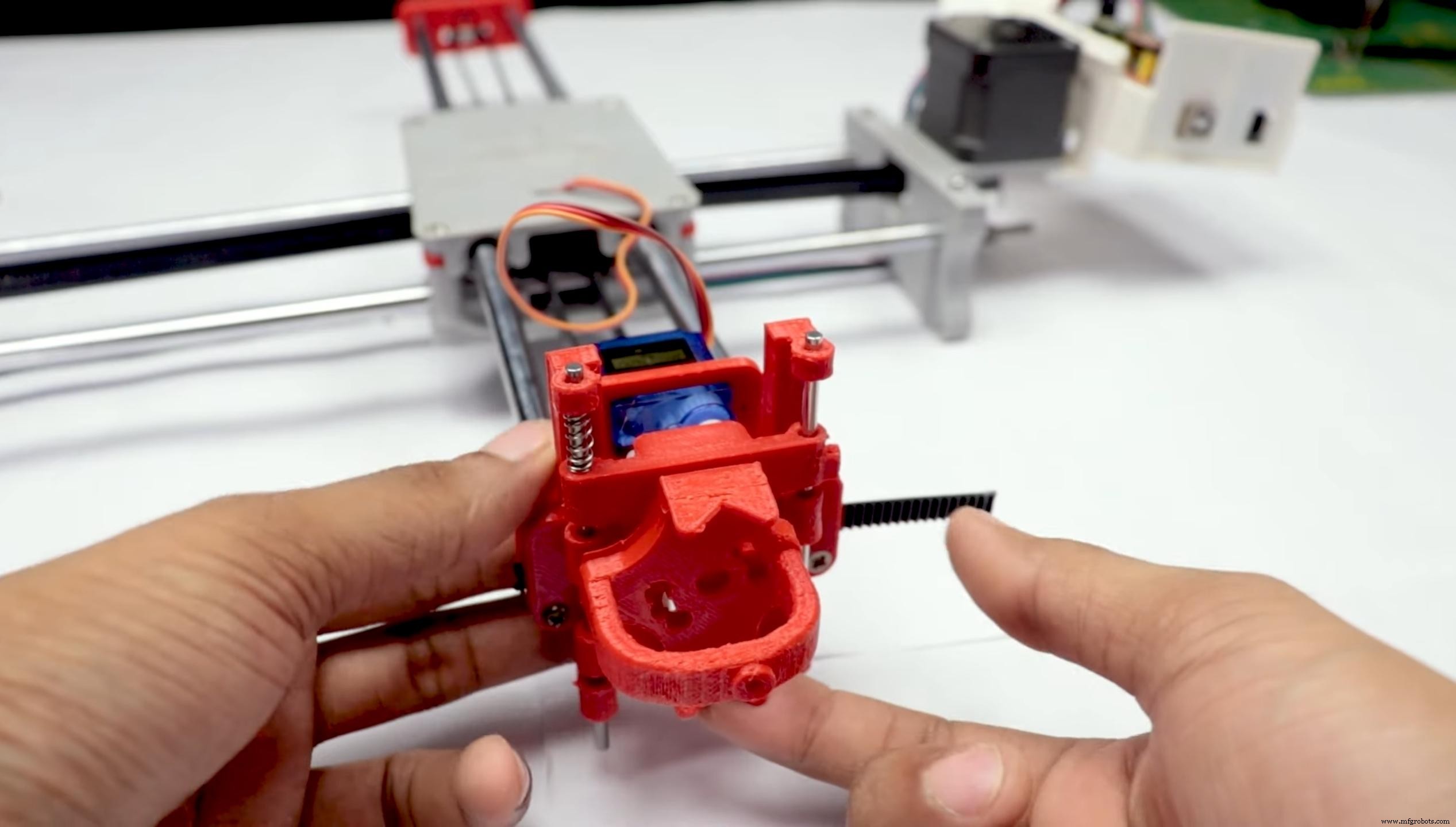
- 获得 (2) 根 3mm 线性杆和以下 3D 打印部件(滑块、笔架、底座滑块、3MM 公制拇指螺丝)
- 获取 (1) 个六角 M3-0.5 x 20mm 螺钉和公制拇指螺钉并将它们推到一起。使用强力胶将其粘合在一起。
- 获取 (3) 个 M3-0.5 x 16mm 螺钉,您将使用这些螺钉将底座滑轨固定到 Y 前部。您可能需要使用 (3) 个 M3-0.5 螺母将其固定到位
- 将滑块和笔架推到一起形成一个整体
- 现在取出新零件和 (2) 根 3 毫米线性杆,然后将杆滑过孔。在两个部件之间放置一个小弹簧,以便有一点压力来抬起滑块。您可能需要将弹簧剪短一点,直到滑块上有足够的压力。
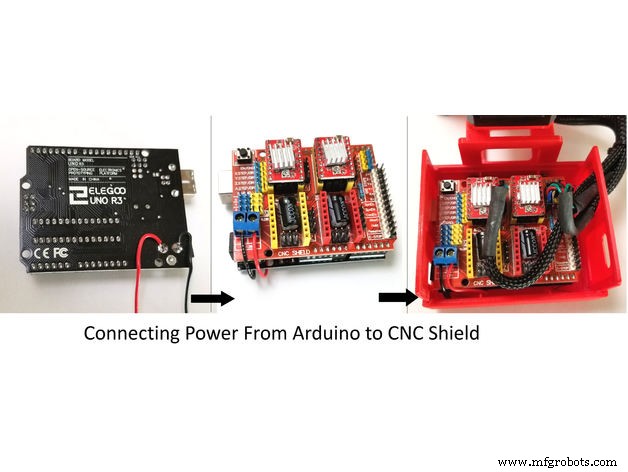
第 8 步: 电子产品
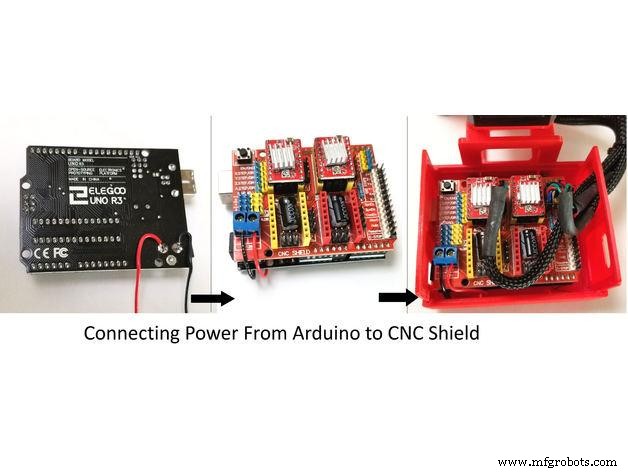

电子产品
我更喜欢你可以使用 Arduino uno CNC Shield
准备好您的所有电路
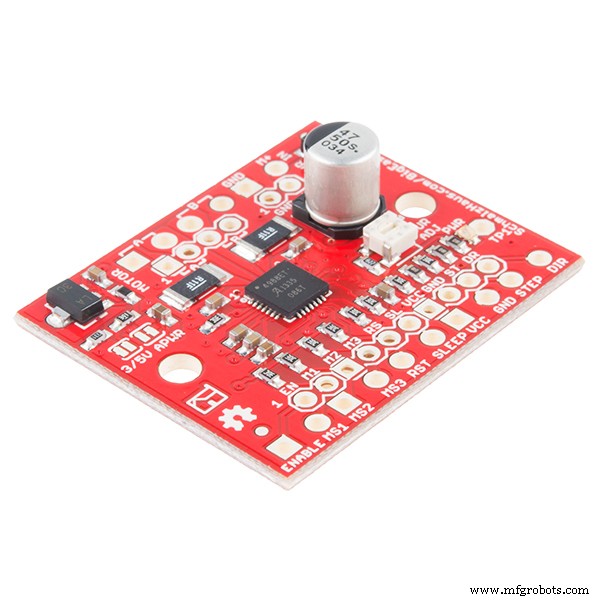
1) 4pcs A4988 步进电机驱动器
2) 扩展板A4988驱动
3) Arduino UNO 首先取下水槽并粘在 A4988 电机驱动器上。
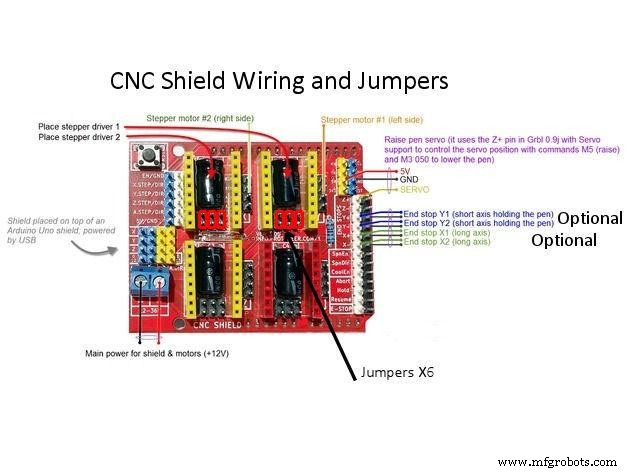
4pcs A4988 步进电机驱动器连接在扩展板上 A4988 驱动器模块,然后将 arduino 与扩展板连接并连接所有接线 屏蔽还具有内置微步进控制 - 这意味着而不是像大型 CNC 那样使用全步或半步可以,我们可以使电机移动 1/16 或 1/32 步长,以使激光以尽可能高的精度移动。但是,电机会消耗更多电力:它们会更快变热。
要使用微步进模式,请将一些模式引脚短接在一起。不同的组合给出不同的分辨率。查看图表以了解可能的不同配置。对屏蔽进行编程后,将 A4988 驱动程序添加到其中并连接其余的电子设备。
要找到步进电机的线圈,请使用万用表。如果两根导线之间存在电阻,则您有一个线圈。在原理图上,线圈由两根相同颜色的导线表示。
第 9 步:软件
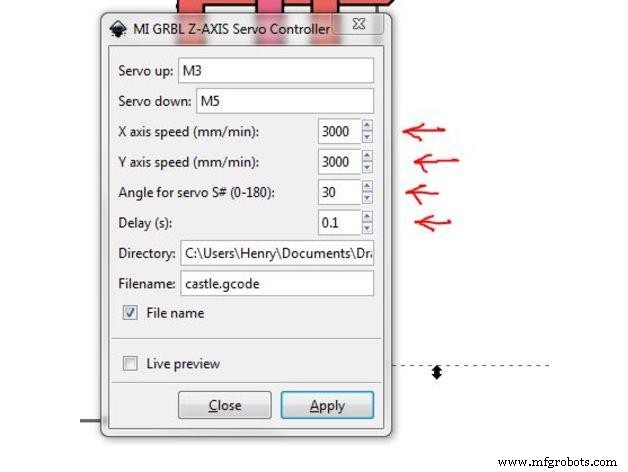
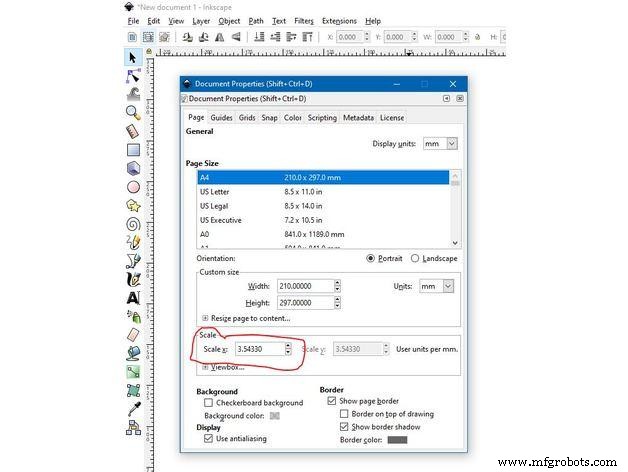
Inkscape 图形设计软件(绘制或导入图形)
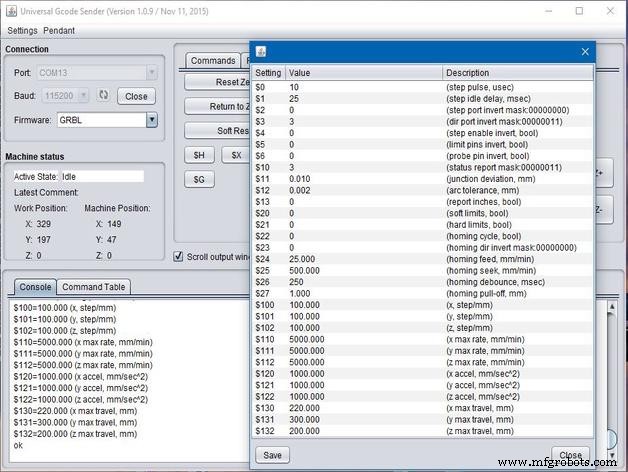
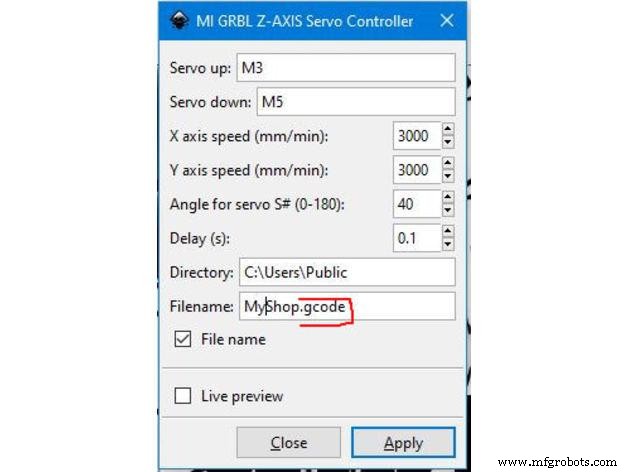
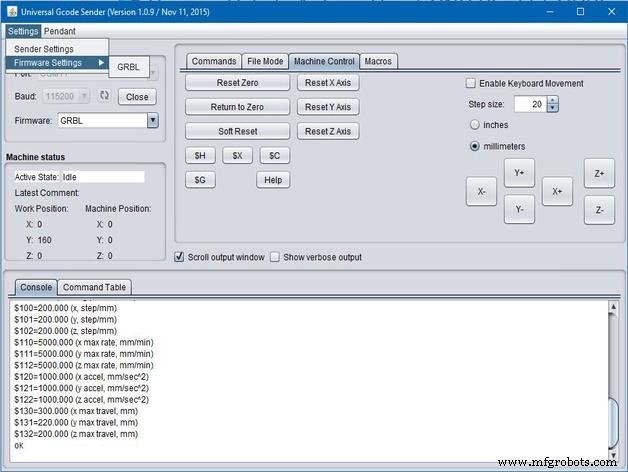
Inkscape MI GRBL Extension (convert graphics to G-Code)Universal G Code Sender(将G-Code发送到机器人引起绘图运动)GRBL这是Arduino固件(编程到Arduino Uno中)
Arduino:https://www.arduino.cc/en/software
通用 G 代码发送器:https://winder.github.io/ugs_website/...
墨景:https://inkscape.org/release/inkscape..
4xiDraw &km 激光:https://drive.google.com/file/d/1YO8-...
处理:https://processing.org/download/
绘图到 G 代码处理:https://drive.google.com/file/d/1PIFx...
观看视频了解完整设置
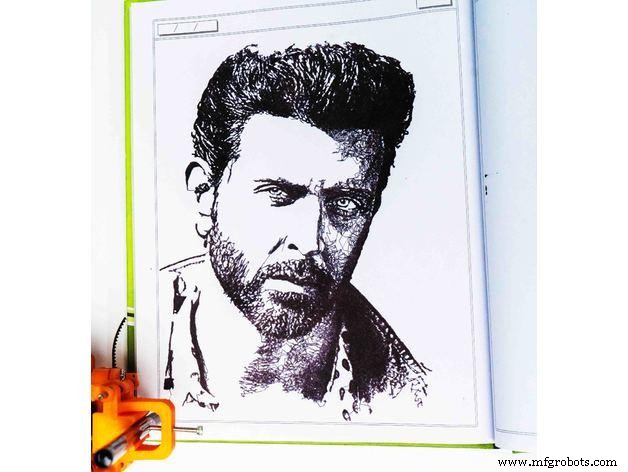
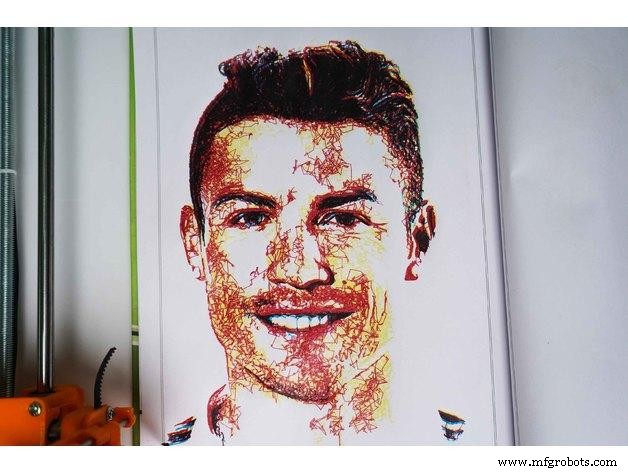
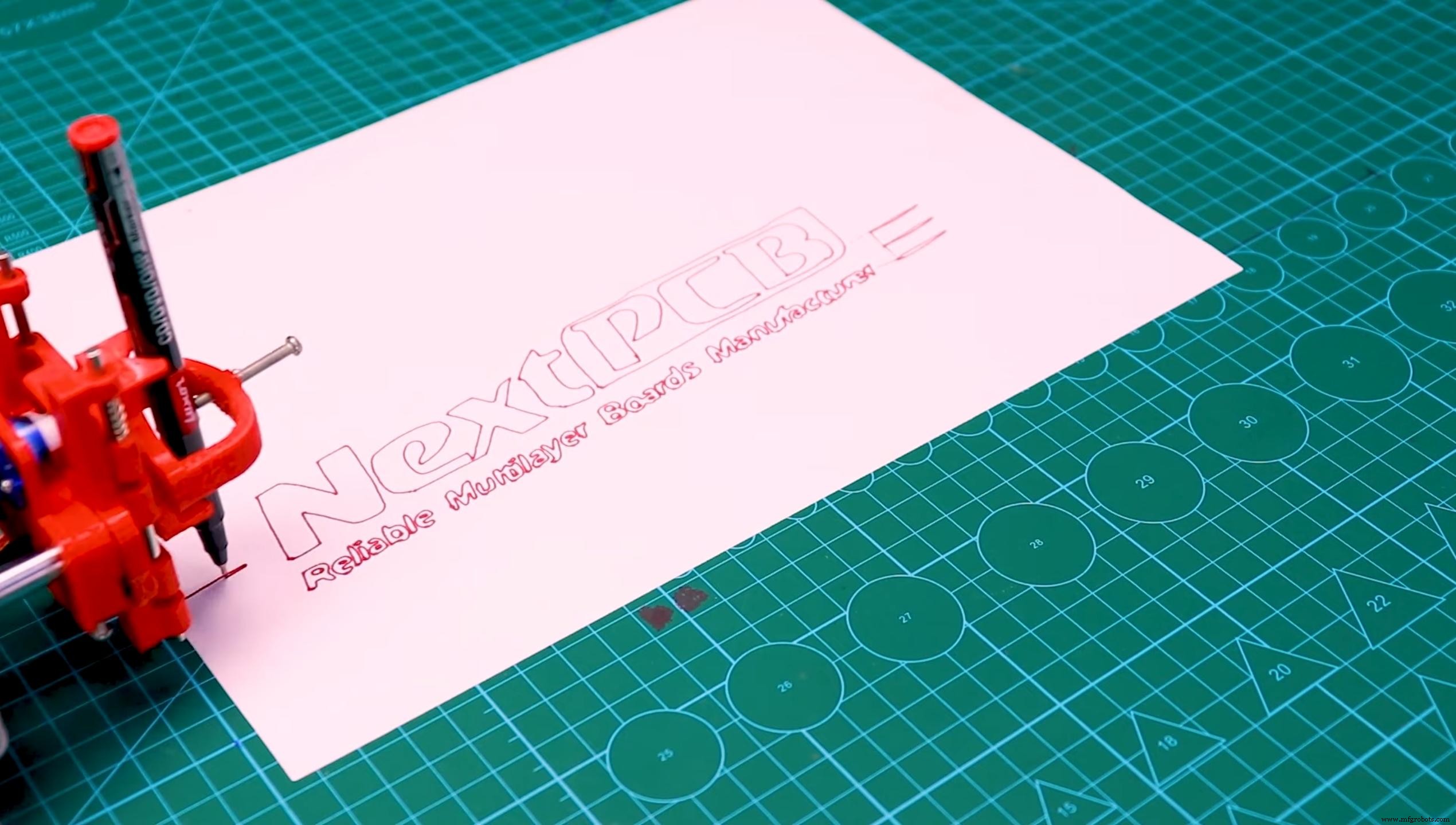
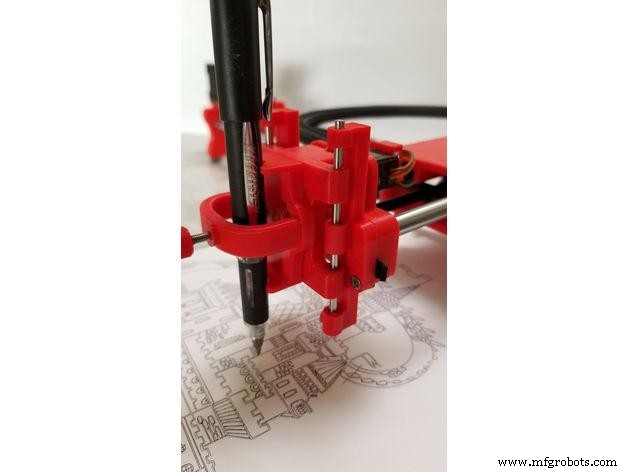
第 10 步:工作中的绘图机
代码
- grbl 代码
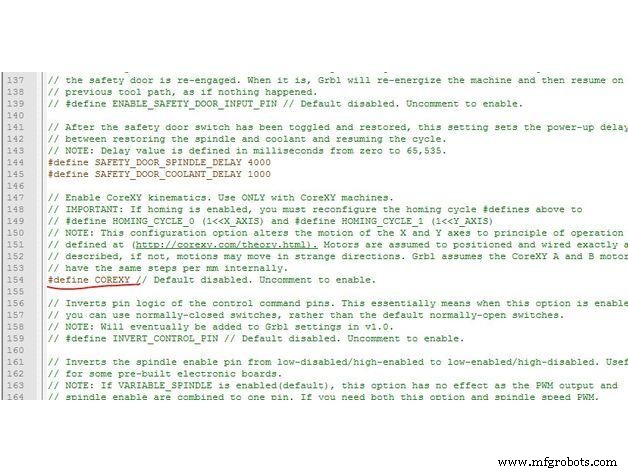
grbl 代码Arduino
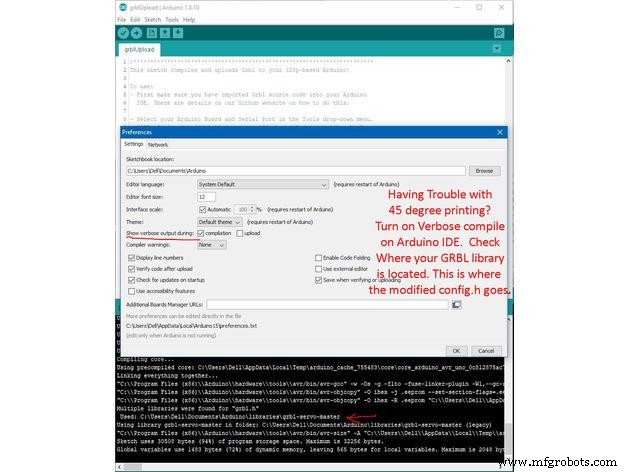
/**************************************************** *************************该草图编译并上传 Grbl 到基于 328p 的 Arduino!使用方法:-首先确保您已将 Grbl 源代码导入您的 Arduino IDE。我们的 Github 网站上有关于如何执行此操作的详细信息。- 在工具下拉菜单中选择您的 Arduino 板和串行端口。注意:Grbl 仅正式支持基于 328p 的 Arduinos,如 Uno。使用其他板可能不起作用!-然后只需单击“上传”。就是这样!对于高级用户:如果您想看看 Grbl 还能做什么,还有一些额外的自定义选项和您可以启用或禁用的功能。将文件系统导航到 Arduino IDE 存储 Grbl 源代码文件的位置,在您喜欢的文本编辑器中打开“config.h”文件。里面有几十个功能描述和#defines。只需注释或取消注释 #defines 或更改其指定的值,保存更改,然后单击此处的“上传”。版权所有 (c) 2015 Sungeun K. Jeon 根据 MIT 许可发布。有关详细信息,请参阅 license.txt。*********************************************** ****************************/#include// 不要修改这个文件!
示意图
制造工艺