

MIA-1 开源高级手工人形机器人!
组件和用品
 |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
大家好,今天我将展示我是如何制作机器人MIA-1的,它不仅先进独特,而且开源,无需3D打印即可制作!是的,你明白了,这个机器人是完全手工制作的。并且开源 意味着 - 您免费获得代码和所有详细信息 ,如果你愿意,你也可以制作这个机器人。
这里我们只看到她的演讲,但她可以做的事情还有很多!
以下是她可以做的事情:
- 可以倾听并与您交谈
- 可以使用她左眼的摄像头看到并认出你
- 可以检测动作并捕捉照片
- 有一个带触摸屏 LCD 的 GUI 来指挥她
- 在她的液晶显示器上显示图像
- 在她的屏幕上下载图片和节目
- 可以使用右手上的激光笔瞄准目标
- 说话时会移动手
- 无需他人帮助即可站立
- 她也可以鞠躬(观看视频)
- 还有更多!
补给:
为了制作这个机器人,我使用了我们当地商店提供的所有东西。
微控制器 + 计算机(大脑):
- Arduino Mega(用于控制伺服电机)
- 一台完整的计算机(您可以使用 Raspberry Pi,但我最初将笔记本电脑用作她的大脑)
伺服电机:
MIA-1有13个自由度。
- LDX227 双轴伺服电机 8x
- MG996r / MG996 伺服电机 3x
- 对于数字我使用微伺服 sg90
请注意,我添加了一个机械爪,它使用了另一个MG996r伺服电机。
以及跳线等
愿景:
对于图像处理,例如拍照和检测人脸等。我使用了 USB 摄像头 .
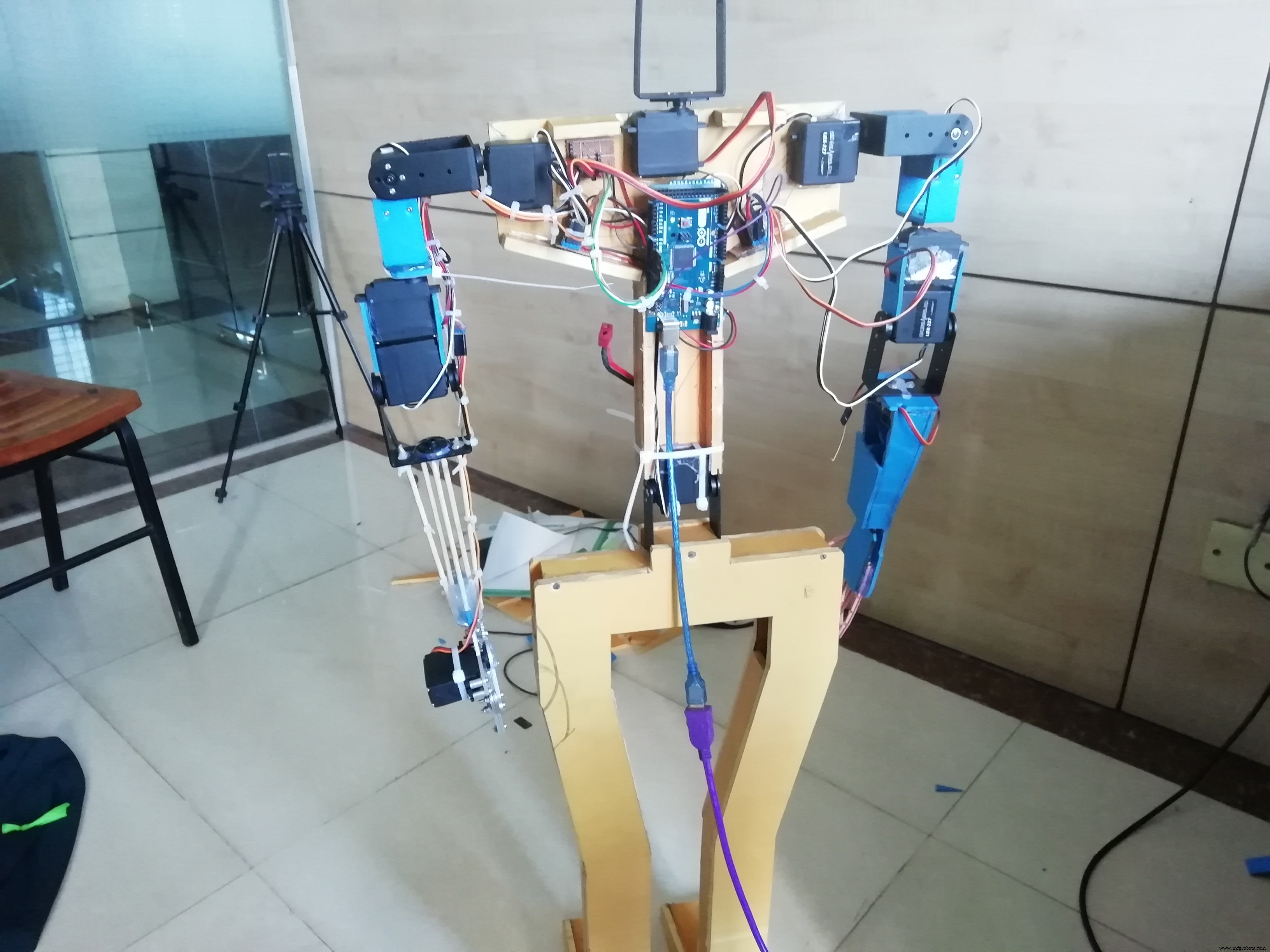
第 1 步:车身和电机布局
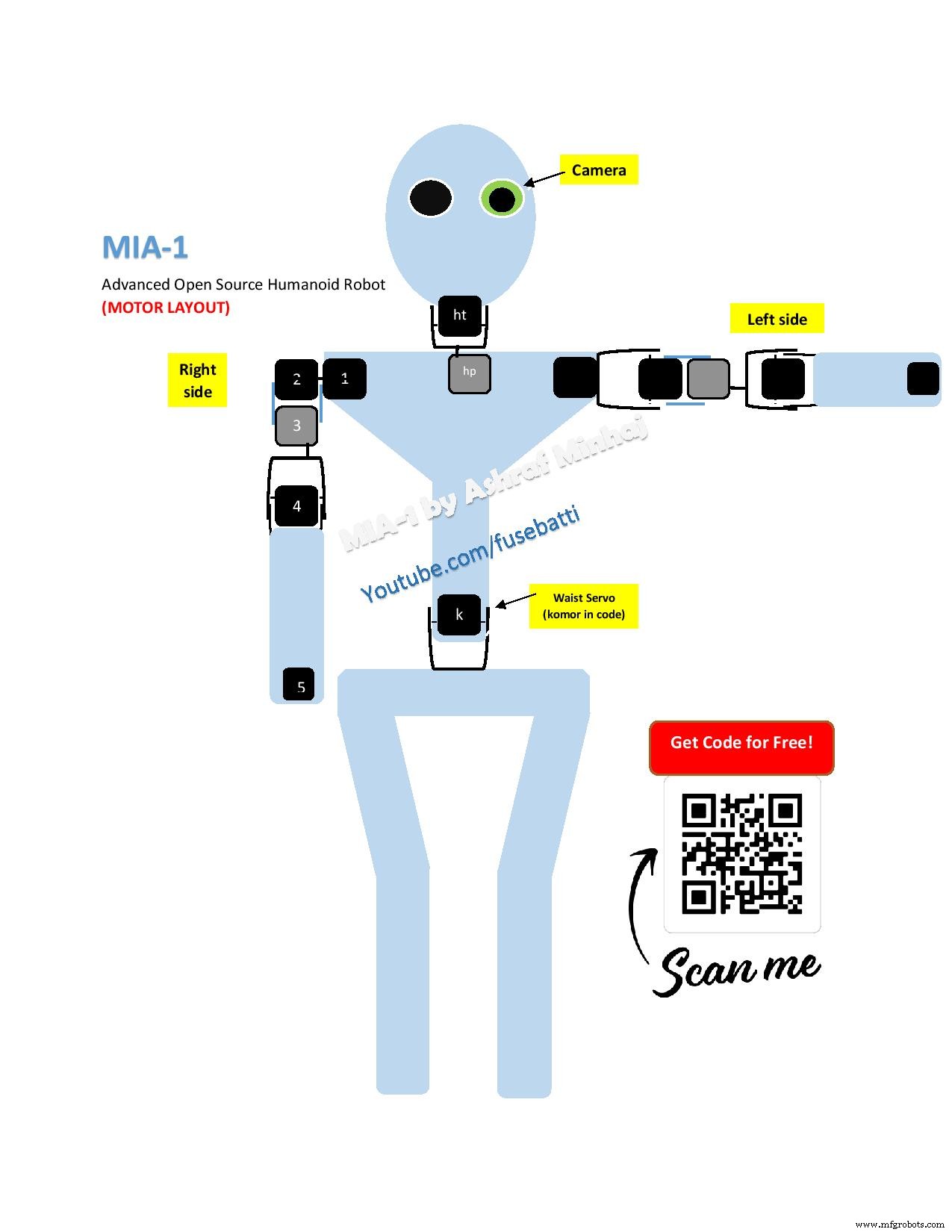

主体采用 PVC 片材制成, 使用热胶连接不同的部分 和螺丝 (见图)。我用切刀切割了 pvc 板(要非常小心!!不要切到你的手指!!)。从图一和图二可以看出伺服布局。当我制作一个女孩机器人时,我给它赋予了女性的体型和身材。
伺服连接器使用薄 pvc 板制成,因为它们弯曲良好。
头部是用气球制成的,在气球中吹气(见图),加入小湿纸,然后晾干。添加8层后,它变得坚固和可持续。
然后用喷色把它涂成白色(全身)。
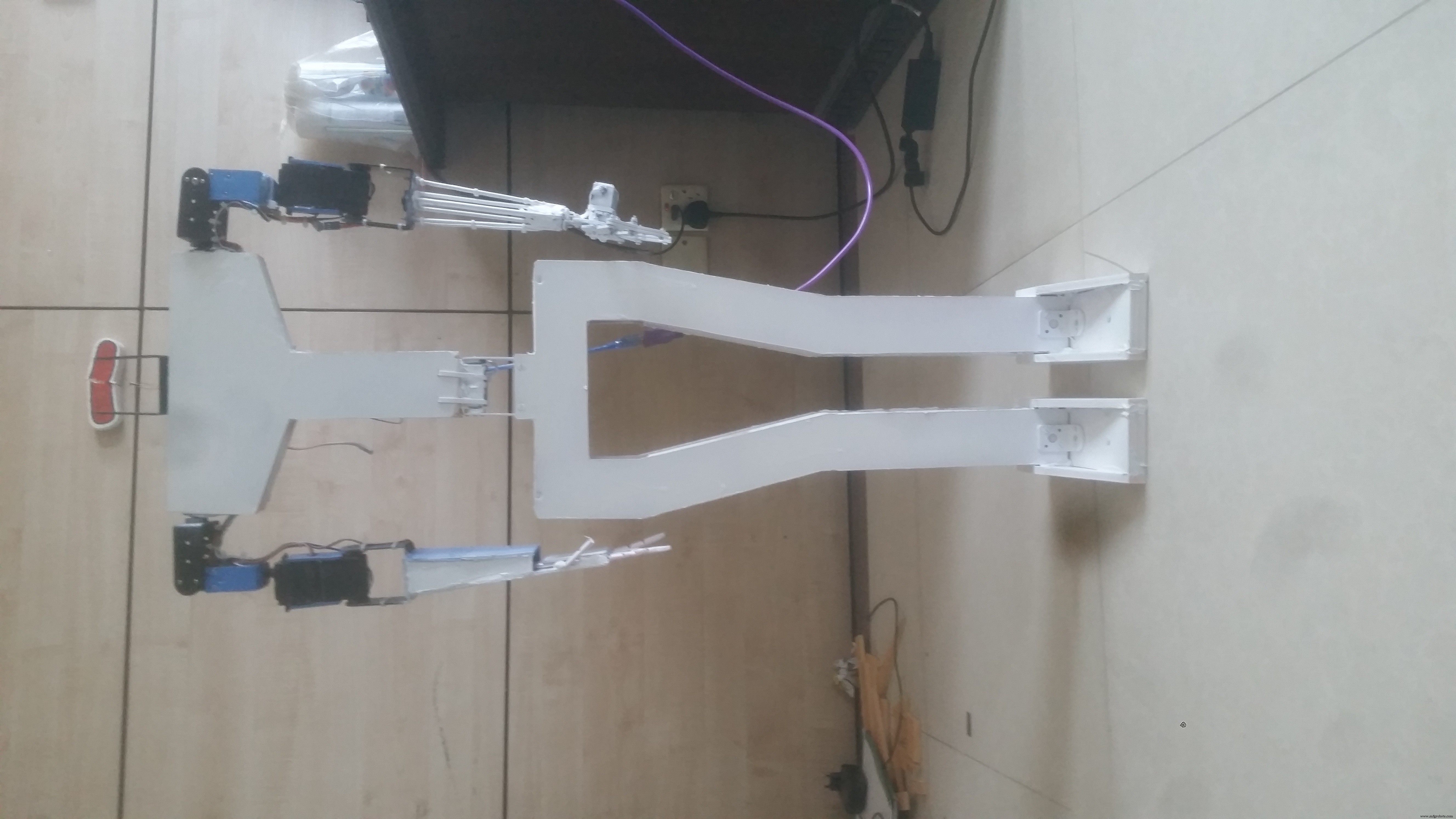
原来设计是如此惊人的平衡,她(MIA-1)就站在她的两只脚上!!
添加显示:
之后就用一些螺丝和热胶将液晶显示器安装在她的胸前(最后一张照片)。
第二步:电路图
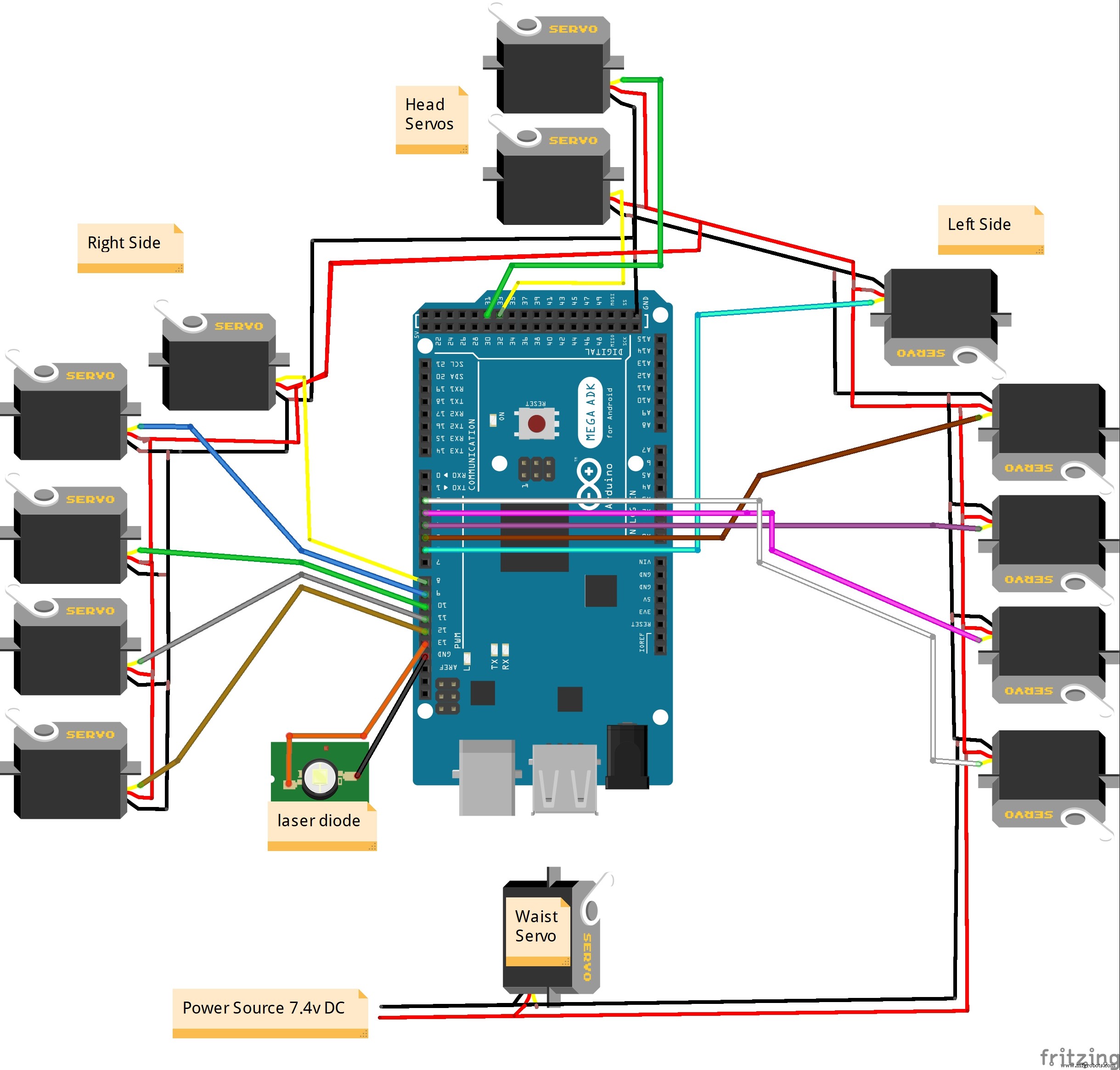
电路图看起来很复杂,其实不然。我把电路画成车身上的电机布局,以便您更容易理解它。确保共同点。 arduino 通过其 USB 电缆从计算机获取电源。有一个激光二极管使mia能够瞄准物体,它从arduino的13引脚(led引脚)取电。
如您所见,所有电机和 arduino 本身都位于机身背面。我也把所有的电缆从后面放了下来。买了一根加长的USB线,可以连接电脑。
第 3 步:代码
如您所知,我使用了 arduino mega。 arduino mega 控制伺服电机,电机是预编程的。从这里获取电机代码。请注意默认伺服位置,在构建机器人时保持这一点。不用做主体,用arduino给电机供电,伺服电机就会到达默认位置(下面的默认位置)
/*舵机默认/待机位置*/
komor.write(4); #腰部舵机
left1.write(120);
rFinger.write(0);
舵机1.write(55);
爪开();
rightStandBy();
leftStandBy();
headTilt.write(134);
headPan.write(90); 电机控制代码750多行(编辑时要小心)。
主要处理使用python3脚本完成。
Python 有 pySerial 库,可以通过串行与 arduino 进行通信。注意“COM 端口”。
#通过串口连接mia电机驱动板
try:
mia =serial.Serial("COM28", 9600)
except:
pass 你还需要pip安装这些库
"""import必要的库"""
#import requests #for make post/get requests
import pyttsx3 #offline text to voice
import Speech_recognition as sr #Speech to文本(需要互联网才能运行)
导入时间
from random import randint #random integer pick library
import tkinter #tkinter gui library
from tkinter import Tk, Button, Label, Tk #import 必要的东西
import serial #serial library for serial communication over USB
from PIL import Image #fro显示图像
import cv2 #Computer Vision library
import wikipedia #to get data直接来自维基百科 使用 pip install 一切都很容易。 对于opencv 在命令提示符下输入:
pip install opencv-contrib-python 您看到的 GUI(图形用户界面)是使用 tkinter 开发的。对于这个和其他所有你可以通过这个命令安装的库:
pip install library_name 然后安装。
如果您使用的是网络摄像头,也请看一看,该摄像头更有可能表示为 1
cap =cv2.VideoCapture(1) #camera 如果你想了解更多关于这个机器人实际上是如何回复的,请阅读本教程。
MIA-1 的代码只是这个的扩展版本。
在命令arduino时,计算机发出一个bite,arduino根据接收到的bits进行动作,因此看起来Mia的动作和说话是异步的。
mia.write(b'p') #命令先抬头再向下
count_down(3)
respond("Smile please", 100) 现在要获取代码,请访问下面的链接。
从这里下载 MIA-1 的代码。
第 4 步:电源和整理
我使用 7.4 v 锂电池为机器人供电。 LDX227 伺服系统非常耗电(但质量很好),因此请确保它们在任何时候都至少获得 7.3 v。另一方面,MG996r 伺服电机很便宜,很容易损坏,确保它们不会超过 7.8V。所以这个机器人的最高电源应该在7.4到7.8伏之间。
快乐制作!如果你喜欢这个机器人,请订阅频道支持更多精彩项目。
代码
免费下载完整代码
ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robothttps://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robot示意图
MIA-1 电路
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robot制造工艺