

什么是微机电系统?带有 Arduino 的加速度计、陀螺仪和磁力计
在本教程中,我们将了解 MEMS 加速度计、陀螺仪和磁力计的工作原理以及如何将它们与 Arduino 板一起使用。此外,借助 Processing IDE,我们将使用传感器进行一些实际应用。您可以观看以下视频或阅读下面的书面教程。
MEMS 是非常小的系统或设备,由尺寸从 0.001 毫米到 0.1 毫米不等的微型元件组成。这些组件由硅、聚合物、金属和/或陶瓷制成,通常与 CPU(微控制器)结合以完成系统。
现在我们将简要解释这些微机电系统 (MEMS) 传感器的工作原理。
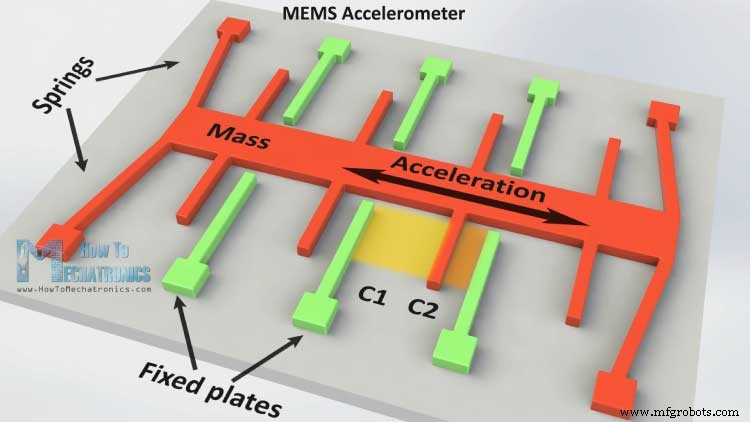
它通过测量电容的变化来测量加速度。它的微观结构看起来像这样。它有一个附在弹簧上的质量块,该弹簧被限制为沿一个方向移动并固定外板。因此,当施加特定方向的加速度时,质量会移动,并且板和质量之间的电容会发生变化。这种电容变化会被测量、处理,并对应一个特定的加速度值。
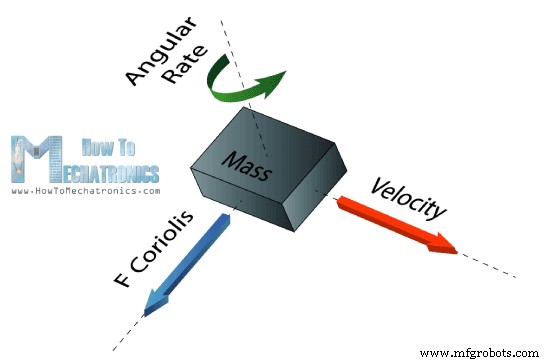
陀螺仪使用科里奥利效应测量角速率。当质量以特定速度沿特定方向移动时,当施加外部角速率时,如绿色箭头所示,将产生一个力,如蓝色红色箭头所示,这将导致质量垂直位移。所以类似于加速度计,这种位移会引起电容的变化,电容会被测量、处理,并对应一个特定的角速率。
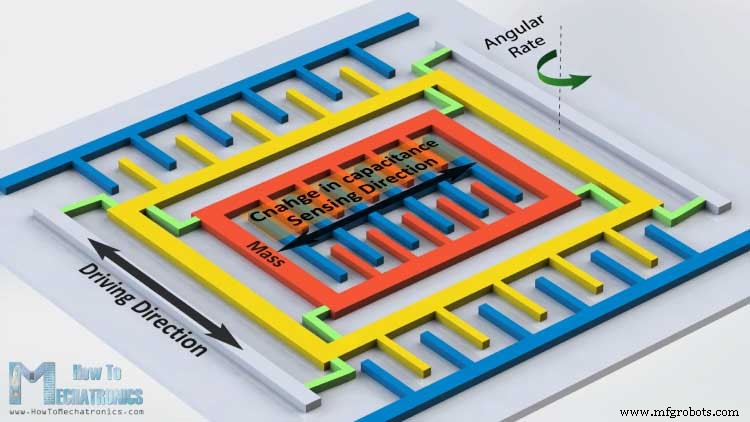
陀螺仪的微观结构看起来像这样。一个不断移动或振荡的质量块,当施加外部角速率时,质量块的柔性部分会移动并产生垂直位移。
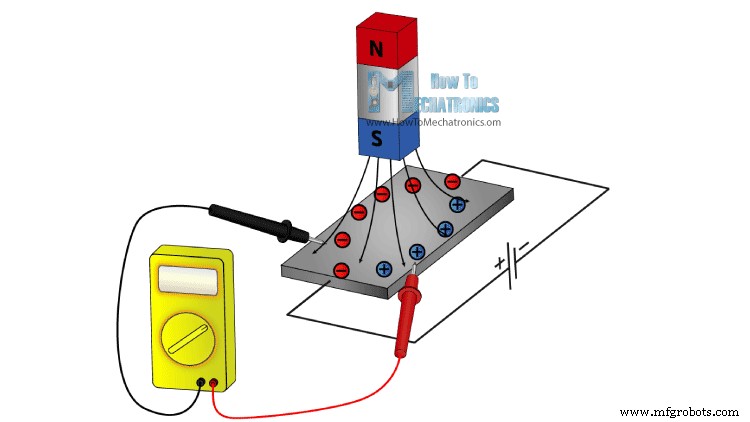
它利用霍尔效应或磁阻效应测量地球磁场。实际上,市场上几乎 90% 的传感器都使用霍尔效应,这就是它的工作原理。
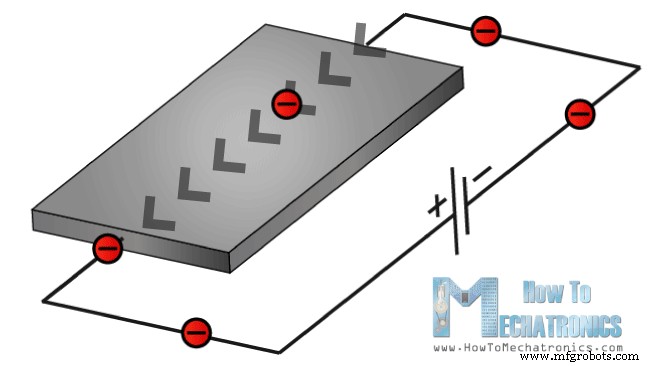
如果我们有一个如图所示的导电板,并且我们设置电流流过它,电子将直接从板的一侧流到另一侧。现在,如果我们在板附近引入一些磁场,我们会扰乱直流,电子会偏转到板的一侧,而正极会偏转到板的另一侧。这意味着如果我们现在在这两个侧面之间放置一个仪表,我们将获得一些电压,该电压取决于磁场强度及其方向。
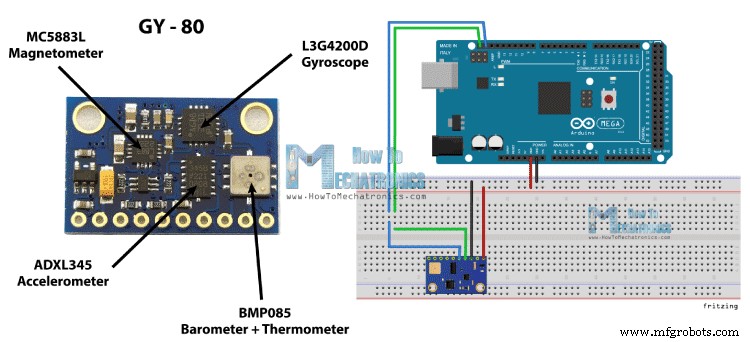
好的,现在让我们将这些传感器连接到 Arduino 板并使用它们。例如,我将使用具有以下传感器的 GY-80 分线板:ADXL345 3 轴加速度计、L3G4200D 3 轴陀螺仪、MC5883L 3 轴磁力计以及气压计和温度计,我们不会在本教程中使用。
您可以从以下任何网站获取这些组件:
该板使用 I2C 通信协议,这意味着我们只需两根线即可使用所有传感器。因此,为了在 Arduino 和传感器之间进行通信,我们需要知道它们的唯一设备地址和它们的内部寄存器地址,以便从中获取数据。这些地址可以从传感器的数据表中找到:
有关 I2C 通信如何工作的更多详细信息,您可以查看我的其他 I2C 通信协议教程。
现在让我们看看从传感器获取数据的代码。我们将从加速度计开始,每个代码之前都会有一些解释,以及代码注释中的一些附加说明。
首先,我们需要包含 Arduino Wire 库并定义传感器的寄存器地址。在设置部分,我们需要启动 Wire Library 并启动串行通信,因为我们将使用串行监视器来显示结果。同样在这里,我们需要激活传感器,或者通过向 Power_CTL 寄存器发送适当的字节来启用测量,这就是我们如何做到的。使用 Wire.beginTransmission() 函数,我们选择要与哪个传感器通话,在本例中为 3 轴加速度计。然后使用 Wire.write() 函数我们告诉我们将与哪个内部寄存器交谈。在此之后,我们将发送适当的字节以启用测量。使用 Wire.endTransmission() 函数,我们将结束传输并将数据传输到寄存器。
在循环部分,我们需要读取每个轴的数据。我们将从 X 轴开始。所以首先我们将选择我们要讨论的寄存器,在这种情况下是两个 X – Axis 内部寄存器。然后使用 Wire.requestFrom() 函数,我们将从两个寄存器请求传输的数据或两个字节。 Wire.available() 函数将返回可用于检索的字节数,如果该数字与我们请求的字节匹配,在我们的例子中为 2 个字节,使用 Wire.read() 函数我们将从X轴的两个寄存器中读取字节。
寄存器的输出数据是二进制补码,X0 为最低有效字节,X1 为最高有效字节,因此我们需要将这些字节转换为从 -1 到 +1 的浮点值,具体取决于 X 轴相对的方向地球加速度或重力。我们将对另外两个轴重复此过程,最后我们将在串行监视器上打印这些值。
为了从陀螺仪获取数据,我们将使用与前一个类似的代码。所以首先我们必须为数据定义寄存器地址和一些变量。在设置部分,我们必须使用 CTRL_REG1 唤醒传感器并将传感器置于正常模式,并选择传感器的灵敏度。在本例中,我将选择 2000dps 灵敏度模式。
在类似于加速度计的循环部分,我们将读取 X、Y 和 Z 轴的数据。然后必须将原始数据转换为角度值。从传感器的数据表中我们可以看到,对于 2000dps 灵敏度模式,对应的是 70 mdps/digit 单位。这意味着我们必须将原始输出数据乘以 0.07 才能获得以度/秒为单位的角速率。然后,如果将角速率乘以时间,它将得到角度值。所以我们需要计算每个循环部分的时间间隔,我们可以使用循环部分顶部和底部的millis()函数来完成,我们将其值存储到这个“dt”变量中。因此,对于每个执行的循环,我们将计算角度并将其添加到最终角度值。我们将对另外两个轴做同样的事情,最后我们将在串行监视器中打印结果。
我们将再次使用与前一个类似的技术。首先,我们需要定义寄存器地址,设置部分将传感器设置为连续测量模式。在循环部分,我们将使用与之前传感器相同的方法获取每个轴的原始数据。
然后我们需要将原始数据转换为磁场值或高斯单位。从传感器的datasheet我们可以看到默认的灵敏度模式是0.92mG/digit。这意味着我们需要将原始数据乘以 0.00092 才能得到高斯单位的地球磁场。最后,我们将在串行监视器上打印这些值。
这是使用 Processing IDE 制作的传感器的一个很酷的应用程序,一个 MEMS 数字罗盘。您可以在以下链接中找到更多详细信息和此示例的源代码:什么是MEMS?
MEMS加速度计
MEMS陀螺仪
MEMS磁力计
市场上另外10%的传感器使用磁阻效应。这些传感器使用对磁场敏感的材料,通常由铁 (Fe) 和镍 (Ne) 组成。因此,当这些材料暴露在磁场中时,它们的电阻会发生变化。Arduino 和 MEMs 传感器
源代码
Arduino 加速度计代码
#include <Wire.h>
//--- Accelerometer Register Addresses
#define Power_Register 0x2D
#define X_Axis_Register_DATAX0 0x32 // Hexadecima address for the DATAX0 internal register.
#define X_Axis_Register_DATAX1 0x33 // Hexadecima address for the DATAX1 internal register.
#define Y_Axis_Register_DATAY0 0x34
#define Y_Axis_Register_DATAY1 0x35
#define Z_Axis_Register_DATAZ0 0x36
#define Z_Axis_Register_DATAZ1 0x37
int ADXAddress = 0x53; //Device address in which is also included the 8th bit for selecting the mode, read in this case.
int X0,X1,X_out;
int Y0,Y1,Y_out;
int Z1,Z0,Z_out;
float Xa,Ya,Za;
void setup() {
Wire.begin(); // Initiate the Wire library
Serial.begin(9600);
delay(100);
Wire.beginTransmission(ADXAddress);
Wire.write(Power_Register); // Power_CTL Register
// Enable measurement
Wire.write(8); // Bit D3 High for measuring enable (0000 1000)
Wire.endTransmission();
}
void loop() {
// X-axis
Wire.beginTransmission(ADXAddress); // Begin transmission to the Sensor
//Ask the particular registers for data
Wire.write(X_Axis_Register_DATAX0);
Wire.write(X_Axis_Register_DATAX1);
Wire.endTransmission(); // Ends the transmission and transmits the data from the two registers
Wire.requestFrom(ADXAddress,2); // Request the transmitted two bytes from the two registers
if(Wire.available()<=2) { //
X0 = Wire.read(); // Reads the data from the register
X1 = Wire.read();
/* Converting the raw data of the X-Axis into X-Axis Acceleration
- The output data is Two's complement
- X0 as the least significant byte
- X1 as the most significant byte */
X1=X1<<8;
X_out =X0+X1;
Xa=X_out/256.0; // Xa = output value from -1 to +1, Gravity acceleration acting on the X-Axis
}
// Y-Axis
Wire.beginTransmission(ADXAddress);
Wire.write(Y_Axis_Register_DATAY0);
Wire.write(Y_Axis_Register_DATAY1);
Wire.endTransmission();
Wire.requestFrom(ADXAddress,2);
if(Wire.available()<=2) {
Y0 = Wire.read();
Y1 = Wire.read();
Y1=Y1<<8;
Y_out =Y0+Y1;
Ya=Y_out/256.0;
}
// Z-Axis
Wire.beginTransmission(ADXAddress);
Wire.write(Z_Axis_Register_DATAZ0);
Wire.write(Z_Axis_Register_DATAZ1);
Wire.endTransmission();
Wire.requestFrom(ADXAddress,2);
if(Wire.available()<=2) {
Z0 = Wire.read();
Z1 = Wire.read();
Z1=Z1<<8;
Z_out =Z0+Z1;
Za=Z_out/256.0;
}
// Prints the data on the Serial Monitor
Serial.print("Xa= ");
Serial.print(Xa);
Serial.print(" Ya= ");
Serial.print(Ya);
Serial.print(" Za= ");
Serial.println(Za);
}
Code language: Arduino (arduino)Arduino 陀螺仪代码
#include <Wire.h>
//--- Gyro Register Addresses
#define Gyro_gX0 0x28
#define Gyro_gX1 0x29
#define Gyro_gY0 0x2A
#define Gyro_gY1 0x2B
#define Gyro_gZ0 0x2C
#define Gyro_gZ1 0x2D
int Gyro = 0x69; //Device address in which is also included the 8th bit for selecting the mode, read in this case.
int gX0, gX1, gX_out;
int gY0, gY1, gY_out;
int gZ0, gZ1, gZ_out;
float Xg,Yg,Zg;
float angleX,angleY,angleZ,angleXc,angleYc,angleZc;
unsigned long start, finished, elapsed;
float dt=0.015;
void setup()
{
Wire.begin();
Serial.begin(9600);
delay(100);
Wire.beginTransmission(Gyro);
Wire.write(0x20); // CTRL_REG1 - Power Mode
Wire.write(15); // Normal mode: 15d - 00001111b
Wire.endTransmission();
Wire.beginTransmission(Gyro);
Wire.write(0x23); // CTRL_REG4 - Sensitivity, Scale Selection
Wire.write(48); // 2000dps: 48d - 00110000b
Wire.endTransmission();
}
void loop()
{
start=millis();
//---- X-Axis
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gX0);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gX0 = Wire.read();
}
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gX1);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gX1 = Wire.read();
}
//---- Y-Axis
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gY0);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gY0 = Wire.read();
}
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gY1);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gY1 = Wire.read();
}
//---- Z-Axis
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gZ0);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gZ0 = Wire.read();
}
Wire.beginTransmission(Gyro); // transmit to device
Wire.write(Gyro_gZ1);
Wire.endTransmission();
Wire.requestFrom(Gyro,1);
if(Wire.available()<=1)
{
gZ1 = Wire.read();
}
//---------- X - Axis
// Raw Data
gX1=gX1<<8;
gX_out =gX0+gX1;
// From the datasheet: 70 mdps/digit
Xg=gX_out*0.07; // Angular rate
// Angular_rate * dt = angle
angleXc = Xg*dt;
angleX = angleX + angleXc;
//---------- Y - Axis
gY1=gY1<<8;
gY_out =gY0+gY1;
Yg=gY_out*0.07;
angleYc = Yg*dt;
angleY = angleY + angleYc;
//---------- Z - Axis
gZ1=gZ1<<8;
gZ_out =gZ0+gZ1;
Zg=gZ_out*0.07;
angleZc = Zg*dt;
angleZ = angleZ + angleZc;
// Prints the data on the Serial Monitor
Serial.print("angleX= ");
Serial.print(angleX);
Serial.print(" angleY= ");
Serial.print(angleY);
Serial.print(" angleZ= ");
Serial.println(angleZ);
delay(10);
// Calculating dt
finished=millis();
elapsed=finished-start;
dt=elapsed/1000.0;
start = elapsed = 0;
}Code language: Arduino (arduino)Arduino 磁力计代码
#include <Wire.h> //I2C Arduino Library
#define Magnetometer_mX0 0x03
#define Magnetometer_mX1 0x04
#define Magnetometer_mZ0 0x05
#define Magnetometer_mZ1 0x06
#define Magnetometer_mY0 0x07
#define Magnetometer_mY1 0x08
int mX0, mX1, mX_out;
int mY0, mY1, mY_out;
int mZ0, mZ1, mZ_out;
float Xm,Ym,Zm;
#define Magnetometer 0x1E //I2C 7bit address of HMC5883
void setup(){
//Initialize Serial and I2C communications
Serial.begin(9600);
Wire.begin();
delay(100);
Wire.beginTransmission(Magnetometer);
Wire.write(0x02); // Select mode register
Wire.write(0x00); // Continuous measurement mode
Wire.endTransmission();
}
void loop(){
//---- X-Axis
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mX1);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mX0 = Wire.read();
}
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mX0);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mX1 = Wire.read();
}
//---- Y-Axis
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mY1);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mY0 = Wire.read();
}
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mY0);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mY1 = Wire.read();
}
//---- Z-Axis
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mZ1);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mZ0 = Wire.read();
}
Wire.beginTransmission(Magnetometer); // transmit to device
Wire.write(Magnetometer_mZ0);
Wire.endTransmission();
Wire.requestFrom(Magnetometer,1);
if(Wire.available()<=1)
{
mZ1 = Wire.read();
}
//---- X-Axis
mX1=mX1<<8;
mX_out =mX0+mX1; // Raw data
// From the datasheet: 0.92 mG/digit
Xm = mX_out*0.00092; // Gauss unit
//* Earth magnetic field ranges from 0.25 to 0.65 Gauss, so these are the values that we need to get approximately.
//---- Y-Axis
mY1=mY1<<8;
mY_out =mY0+mY1;
Ym = mY_out*0.00092;
//---- Z-Axis
mZ1=mZ1<<8;
mZ_out =mZ0+mZ1;
Zm = mZ_out*0.00092;
//Print out values of each axis
Serial.print("x: ");
Serial.print(Xm);
Serial.print(" y: ");
Serial.print(Ym);
Serial.print(" z: ");
Serial.println(Zm);
delay(50);
}Code language: Arduino (arduino)
制造工艺