

自动化冠军在美国与令人震惊的集成问题作斗争
项目旨在架起机器人与其他工厂组件之间的沟通桥梁
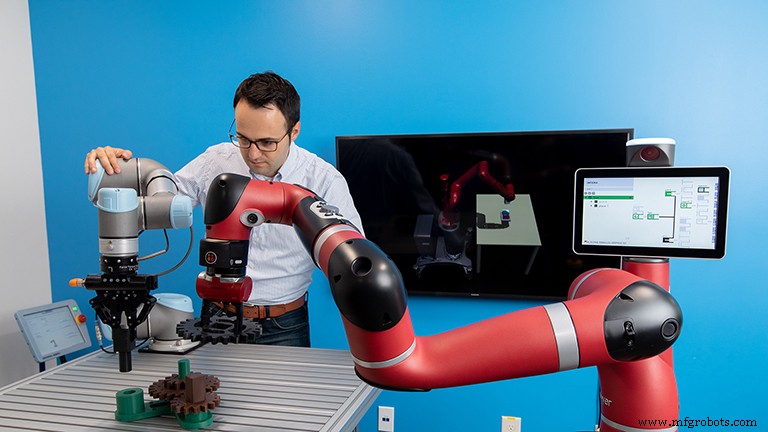
就像联合国的国际代表使用口译员相互理解一样,来自不同供应商的机器人、机器和其他工业组件使用不同的计算机语言,需要翻译人员帮助他们进行交流。
很大程度上出于经济原因,制造机床、机器人、输送机等的公司使用专有软件进行操作和相互通信,以及与传感器、驱动器和 PLC 等组件进行通信。机器制造商希望工厂采购部门坚持他们的整体解决方案品牌,以创造更多收入。
“曾经盛行的想法是,如果我要投资我的资金并提供解决方案,我想保护我的销售,”西南研究 ROS-Industrial (ROS-I) 美洲联盟项目经理 Matthew Robinson 说研究所。 “如果我提供机床,我希望客户使用我的所有产品……我的软件、我的硬件和与之相关的互连技术。”
当工厂所有者决定改用不同的品牌时,就会出现沟通问题并阻碍可以提高产量和质量的集成、模拟和分析。
到目前为止,在工厂中实现所有技术之间通信的任务主要落在了系统集成商身上,他们创建了计算机代码转换器或桥梁,例如,从 3D 相机到机器人或不同供应商制造的两个机器人之间.这是一个耗时长、成本高的过程,以至于工程连接的价格可能超过机器本身的价格。
西门子技术先进制造自动化研究小组负责人胡安·阿帕里西奥说:“工程耗时太长,成本太高,很多公司都不会走自动化路线。” “这对他们来说没有意义,因为他们没有足够的预算来证明自动化是合理的。”
向共同标准迈进
这种情况导致了一个大问题:与集成相关的时间和费用阻碍了许多商店采用自动化,并阻碍了美国工业的进步。
制造商以及他们充满希望的集成问题解决者(如 Robinson、Aparicio 等)现在正在经历的事情在另一个制造领域已经有了先例。
大约 30 年前,在半导体行业,来自不同供应商的蚀刻光刻机等晶圆加工设备还无法相互通信。为了应对这种情况下即将发生的萎缩,半导体制造商成立了一个联盟,并告诉供应商他们必须创建一个通用标准。这正是发生的事情。
“问题是,‘客户的需求是否足以推动[现在]共同标准的创建?”这是伦斯勒理工学院电气、计算机和系统工程主管 John Wen 所说的。 “还有待观察,但似乎有朝那个方向发展。”
Wen 也是目前致力于实现通用性并创建翻译机器语言的桥梁的人之一,以便工厂的设备可以相互通信。
他们的工作由先进的制造机器人 (ARM) 研究所资助,该研究所是美国制造业的一部分。 ARM 研究所资助的项目包括开发特定的中间件(一个来自学术界,另一个来自财大气粗的企业家 Scott Hassan),以达到更高的技术准备水平,因此中间件选项已准备好用于一般工业用途,并可以帮助工厂通过可操作的通信进行嗡嗡声.
即插即用解决方案
Wen 正在领导一个名为“Robot Raconteur (RR):机器人的可互操作中间件”的项目。 RR 收集数据并调用函数,就像操作相机一样。
“Robot Raconteur ... 是一种先进的、增强的、面向对象的中间件技术,专门设计用于为自动化/机器人系统提供真正的即插即用互操作性能力,”Wen 的研究建议称。
RR 已经是多功能的:它与 Linux、Windows、OSX、iOS、Android、OpenBSD、QNX、Arduino 和 xPC Target 操作系统兼容。它拥有适用于 C++、Python、C#、Java、MATLAB、LabView、浏览器 JavaScript 和 xPC Target 的库。
Raconteur 中间件是由 John Wason 在 Wen 的 Rensselaer 实验室开发的。在 Wason 获得博士学位后,他剥离了自己的公司 Wason Technology,专注于中间件。 Wason 与 Rensselaer 一起参与了 ARM 研究所资助的研究,西南研究院和联合科技公司也参与其中。
与此同时,工业机器人的用户仍然依赖于反复训练的过程来让它们工作。
Wen说,摆脱“教和重复”范式的关键是使用传感器,无论是视觉、3D、激光扫描、接近、触觉还是力。
然而,在机器人中集成和编程传感器会增加复杂性:它们是额外的成本。传感器可能会损坏。可以破坏的东西越多,一条生产线出现故障的可能性就越大,从而花费工厂的资金。
Wen 的解决方案是将 RR 开发成一个开源的即插即用系统,这将使来自多个供应商和平台的机器人、传感器、外围设备和仿真软件的编程和集成变得简单、快速和安全。
温说,这也将为使用更广泛的传感器打开大门,包括成本较低的消费级产品,例如 Azure Kinect 和英特尔 RealSense 3D 摄像头。
“以您选择的语言编写程序”
Robinson 在西南研究院的工作与生俱来的是与 ROS-I 合作和推广,这是另一个类似于 RR 的开源中间件,因为您可以连接不同的设备集,但它也有助于可视化和模拟。
他知道供应商推广一种且只有一种解决方案的孤立范例是首先让制造在连接领域陷入困境的原因。
因此,Robinson 权衡了利弊,并坦言其基础 ROS(机器人操作系统)在物联网特定领域的负面影响。
“ROS 的一大缺点是它包含大量 C++,这是一种快速发展和更新的计算机语言,”他说。 “对于新手来说,这可能是令人生畏的,并且充满了各种各样的问题。因此,有很多实体和工具可以帮助那些只想让他们的系统正常工作的业内人士免于编写各种深入的、核心的 C++ 计算机科学软件。
“RR 力求降低进入门槛。”
Aparicio 是计算机语言多样性的另一位支持者。
他说:“我认为说制造业中只有一种语言是不现实的,但如果有多种语言——各有利弊——那么我们需要一个网关”,即充当解释器的软件形式。
Aparicio 是 ARM 研究所资助项目的首席研究员,该项目旨在创建即插即用的开源软件,以实现自动化系统、模拟器、云平台和机器人(由 ROS-I 控制)之间的互操作性和通信。
该网关将与制造中三种广泛使用的标准和协议一起使用:OPC-UA、MTConnect 和 DDS。
与西门子和西南研究院一起参与该项目的还有软件公司 Real Time Innovations 以及机器人供应商 Keba 和 Yaskawa。
“最后,秘诀在于让所有这些机器能够轻松地相互交谈……互操作……抽象所有这些低级通信,以便您可以使用您选择的语言进行编程,”Aparicio 说。
旧机器也能说话吗?
新的机床和工厂设备配备了开箱即用的连接性和互操作性,它们的所有者应该能够充分利用 Aparicio、Wen 和 Robinson 所做的工作。
但是旧机器呢?
“总的来说,如果它有网卡,如果它可以支持在传统互联网上移动信息,我们就可以了,”Robinson 说。
即使是一些使用了十年左右的遗留机器人也可能能够投入工作,而不是在工厂储藏室里积尘。
“如果你有一个 10 岁左右的机器人,那时它本质上是一项免费资产,所以你只需添加一些传感器,利用一些软件,”罗宾逊说。 “除非你有一个优秀的内部团队,否则你可能必须与合同合作伙伴合作,但你可以以比从头开始购买全新系统更低的 [成本] 启动和运行。
“这种投资回报变得非常引人注目。”
编码员的工作永远不会完成
即使在 ARM 研究所资助的项目中投入了所有专业知识和辛勤工作,并取得了成功,但要帮助美国制造业充分发挥互操作性和连接性潜力,仍有大量工作要做。
还有更多参与者的空间。
“这种项目知道的人越多越好。我们希望让越来越多的公司加入进来,”Aparicio 说。 “这并不是说我们正在完全解决问题。我们正在解决一个小障碍。需要一些进一步的项目来解决更大的问题。
正如温所说的项目成果:“每个人都想要这个。”
什么是 ROS?
由先进制造机器人 (ARM) 研究所资助的一些技术开发项目利用了 ROS-Industrial 软件中的大量内容来增强其功能,并理想地强化为一般工业用途开发的模块。

ROS-Industrial的基础软件代码ROS的历史根植于硅谷。
ROS 代码是由公司创始人 Scott Hassan 领导的 Willow Garage 团队开发的,他是硅谷亿万富翁,是谷歌的关键软件架构师,根据他随后的公司合适的技术网站上发布的简历。 ROS,以及现在的 ROS2,目前由非营利组织 Open Robotics 开发和维护。
常用名称 ROS 是“机器人操作系统”的首字母缩写词,但它的功能不足。
“ROS不是传统意义上的进程管理和调度的操作系统;相反,它在主机操作系统之上提供了一个结构化的通信层……”,根据 Willow Garage 网站上对 ROS 的概述。
自动化控制系统