

使用 Arduino 和 MPU6050 控制伺服电机
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
组件
- Arduino UNO
- MPU6050
- MG 996R 伺服电机
- 跳线
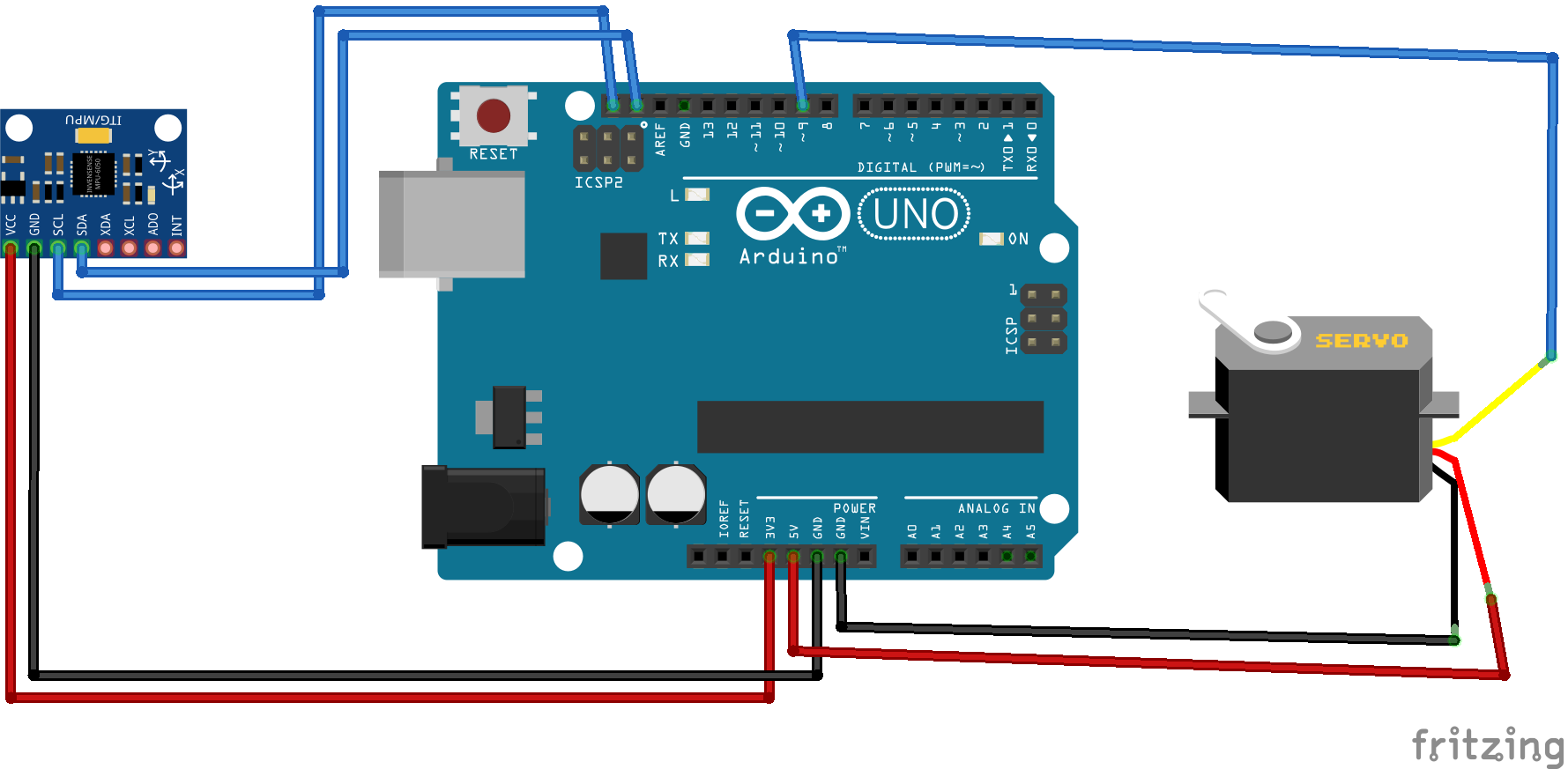
连接
检查连接图
注意:您也可以将MPU6050的SDA和SCL引脚分别连接到Arduino的A4和A5引脚。
编程
在您的 arduino IDE 中包含附加的库,然后将代码上传到您的 Arduino 板中。
注意
查看视频以获得完整的理解并订阅我们的频道以了解更多信息。
谢谢。
代码
- MPU6050 库
- 项目代码
MPU6050 库C/C++
无预览(仅限下载)。
项目代码C/C++
//hammadiqbal12@gmail.com//https://www.youtube.com/watch?v=Cvtr3LKdqvk#include//陀螺仪库 #include #include 伺服myservo; // 创建伺服对象来控制一个servoint X =0;int Y =0;GY6050 gyro(0x68); //保存陀螺数据void setup() { Wire.begin(); //初始化陀螺 gyro.initialisation();延迟(100); myservo.attach(9);}void loop() { X =map(gyro.refresh('A', 'X'), -90, 90, 0, 180); //根据伺服电机的角度限制映射陀螺数据 Y =map(gyro.refresh('A', 'Y'), -90, 90, 0, 180); myservo.write(Y); //Y轴的移动将控制伺服延迟(15);}
示意图
制造工艺