

u-blox LEA-6H 02 GPS 模块,带有 Arduino 和 Python
组件和用品
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
使用 Arduino UNO(或任何其他 Arduino 设备)连接 GPS 模块(我使用 LEA-6H 02)并计算纬度和经度以显示在用 Python 编写的应用程序窗口上。
步骤 1:获取 u-blox LEA-6H 02 GPS 模块,阅读数据表规格,并使模块准备好连接到 Arduino
- 仔细阅读 u-blox LEA 6 数据表并确保您的模块正确
- 大多数模块在 ~2.7 到 3.6v 下运行 ,所以请确保您有合适的电源,我使用了 Arduino 3.3v 引脚
- 所有模块都支持UART通信端口,因此我们将使用它与Arduino接口
- 默认情况下,模块带有微型母插座,我发现它很难连接到 Arduino,因此我用 2.54 毫米跳线母插座替换了它(在更换它之前,请确保您知道哪个引脚做什么,并在上面制作引脚图)纸或电脑)
- 现在此模块已准备好连接到 Arduino
第 2 步:将 GPS 模块与 Arduino 连接
GPS模块的Tx和Rx与Arduino的Rx和Tx连接
- GPS 的 Tx(在我的情况下是绿线)到 => Arduino 的 Rx
- GPS 的 Rx(在我的例子中是黄线)到 => Arduino 的 Tx
- 识别 GPS 模块的 Tx(发射器)和 Rx(接收器),在 Arduino 上也相同(我使用 UNO,所以它只有 1 个 UART 通信端口,Tx 在 pin0 上,Rx 在 pin1 上,更多关于 Arduino UNO 的规格)
注意:确保您对 GPS 模块施加的电压不超过 3.3v(最大 3.6v)并仔细阅读模块说明
第三步:上传Arduino程序读取串口(通信)端口
- 此项目的代码可以在 GitHub 存储库中找到
- 链接:https://github.com/harshgosar/LEA-6h-GPS-Arduino-Python
- 请务必阅读 README.md 文件
观察屏幕上的反应
- 给出有效响应需要一些时间,取决于 GPS 模块接收到的信号强度
- 将 GPS 模块放在开阔的环境中或靠近窗户
- 按照上面的README.md文件安装u-center软件
- 将Arduino代码上传到Arduino模块
- 将 GPS 引脚连接到 Arduino
- 在 Arduino IDE 上打开串行监视器并观察 GPS 模块的输出,确保它打印出有价值的输出
- 关闭串口监视器断开Arduino串口,现在打开u-center软件,选择Arduino串口
第四步:执行Python代码
- 在本地机器上下载并配置 Python
- 下载 Python 代码,通过您机器的串行通信端口读取 GPS 数据
- 使用 Arduino 连接 GPS 并为其供电
- 确定 Arduino 所连接的 com 端口
- 运行 Python 代码
- 输入com端口详细信息
- 验证经纬度数据
代码
Github
https://github.com/harshgosar/LEA-6h-GPS-Arduino-Pythonhttps://github.com/harshgosar/LEA-6h-GPS-Arduino-PythonLEA-6h-GPS-Arduino-Python
上传到微控制器的Arduino代码和接口的Python代码https://github.com/harshgosar/LEA-6h-GPS-Arduino-Python示意图
GPS 和 Arduino 连接图像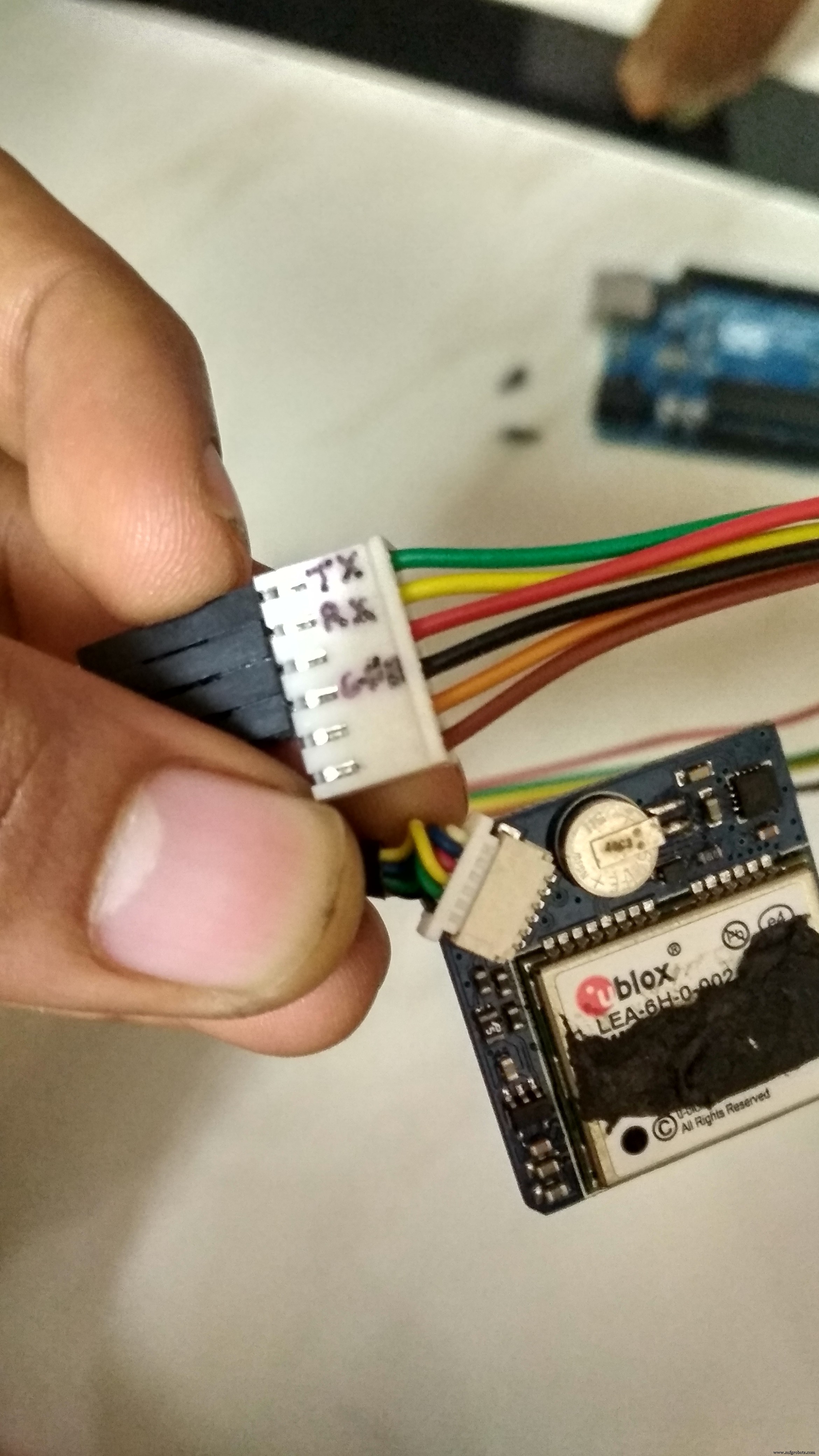 GPS 和 Arduino 连接 Image2
GPS 和 Arduino 连接 Image2 
制造工艺
- 使用 Raspberry Pi 和 Python 构建机器人
- 使用示例在 Python 中导入模块
- 用 Arduino 捕捉水滴
- 使用 Arduino 和 RFID 和 Python 的考勤系统
- 带 LED 和压电扬声器的 DHT11 传感器
- Arduino 温度。使用 3.2 显示的监视器和实时时钟
- 如何将 Arduino Mega 与 NEO-6M GPS 模块连接
- 使用 Arduino 和 MPU6050 控制伺服电机
- 使用 Arduino 进行语音识别和合成
- 带 GPS 和 TFT 显示屏蔽的 GPS 位置显示
- Arduino + GPS 模块 - 目的地通知器
- 带 Arduino 和蓝牙的智能咖啡机