残疾人手势控制轮椅
组件和用品
关于这个项目
https://drive.google.com/open?id=1RNI2ehaknWPN0lPpKm8wv95DUVcTr8H6

• 印度农村和城市地区的残疾人比例都有所增加。残疾可能是天生的,也可能是由于某些医疗或意外原因造成的。
•这个项目的目的是制作一种手势控制的轮椅,并使用加速度计作为传感器,帮助身体残疾的人通过手的指示从一个地方移动到另一个地方
•今天在印度,许多人患有残疾,有些人下半身瘫痪。这款轮椅将增加舒适度,让人们的生活更轻松
代码
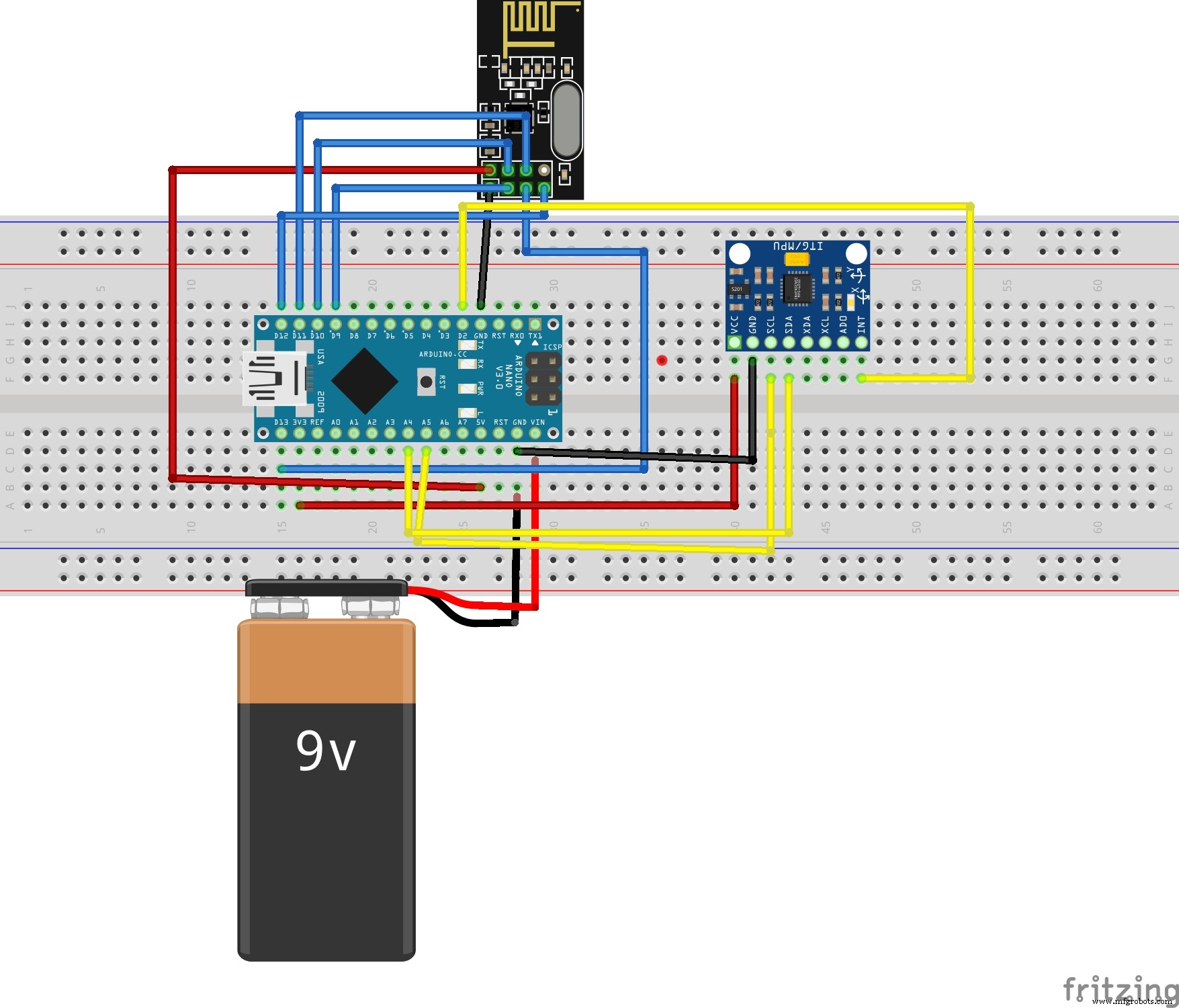
发射器代码Arduino
#include //用于与nRF24L01通信的SPI库+#include "RF24.h" //nRF24L01的主库+#include "Wire.h" //用于通信#include "I2Cdev.h" h" //与MPU6050通信#include "MPU6050.h" //MPU6050MPU6050主库 mpu;int16_t ax, ay, az;int16_t gx, gy, gz;int data[2];RF24 radio(9, 10); const uint64_t 管道 =0xE8E8F0F0E1LL;void setup(void){ Serial.begin(9600); Wire.begin(); mpu.initialize(); //初始化MPU对象radio.begin(); //启动nRF24通信 radio.openWritingPipe(pipe); //设置程序将数据发送到的接收者的地址。}void loop(void){ mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);数据[0] =地图(ax, -17000, 17000, 300, 400); //发送X轴数据 data[1] =map(ay, -17000, 17000, 100, 200); //发送Y轴数据 radio.write(data, sizeof(data));}
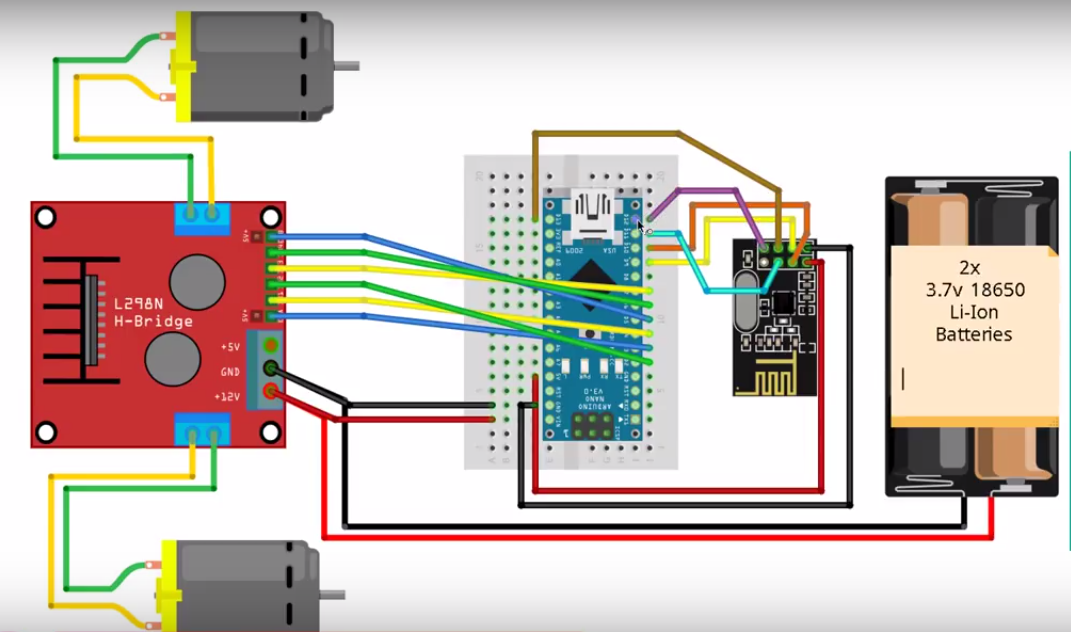
接收器代码Arduino
#include #include #include #include #include //用于与 nRF24L01+#include 通信的 SPI 库RF24.h" //nRF24L01+const的主库 int enbA =3;const int enbB =5;const int IN1 =2; //右马达(-)const int IN2 =4; //右马达(+)const int IN3 =7; //左电机(+)const int IN4 =6; //Right Motor (-)int RightSpd =130;int LeftSpd =130;int data[2];RF24 radio(9,10);const uint64_t pipe =0xE8E8F0F0E1LL;void setup(){ //定义电机引脚为OUTPUT pinMode(enbA,输出); pinMode(enbB,输出); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, 输出); pinMode(IN4,输出); Serial.begin(9600);收音机。开始(); radio.openReadingPipe(1, 管道); radio.startListening(); }void loop(){ if (radio.available()){ radio.read(data, sizeof(data)); if(data[0]> 380){ //forward analogWrite(enbA, RightSpd);模拟写入(enbB,LeftSpd);数字写入(IN1,高);数字写入(IN2,低);数字写入(IN3,高);数字写入(IN4,低); } if(data[0] <310){ //backward analogWrite(enbA, RightSpd);模拟写入(enbB,LeftSpd);数字写入(IN1,低);数字写入(IN2,高);数字写入(IN3,低);数字写入(IN4,高); } if(data[1]> 180){ //left analogWrite(enbA, RightSpd);模拟写入(enbB,LeftSpd);数字写入(IN1,高);数字写入(IN2,低);数字写入(IN3,低);数字写入(IN4,高); } if(data[1] <110){ //right analogWrite(enbA, RightSpd);模拟写入(enbB,LeftSpd);数字写入(IN1,低);数字写入(IN2,高);数字写入(IN3,高);数字写入(IN4,低); } if(data[0]> 330 &&data[0] <360 &&data[1]> 130 &&data[1] <160){ //停止汽车analogWrite(enbA, 0);模拟写入(enbB,0); } }}