

手势控制机器人
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
应用和在线服务
 |
|
关于这个项目
更新:可以在此处找到此项目的更新版本
简介
我希望我能用手控制一切!坐在我的椅子上,像 BOSS 一样控制东西。我会喜欢的!所以我终于出来了一个很酷的DIY手势识别机器人,它可以遵循手势发出的命令。听起来很疯狂,但我保证这很简单。制作一个手势控制机器人其实很简单。这个机器人是我使用 RF 模块的另一个 DIY 项目遥控车的改进。
在这里,机器人也分为两部分,发射器和接收器。接收电路和老帖一样,只是发射电路略有变化,这里我们需要对发射电路进行编程。所以我将使用 Arduino 作为编程平台。为了识别做出的手势,我将使用加速度计传感器。所以让我们开始建造吧!
观看运行中的机器人
那是什么以及它是如何工作的?
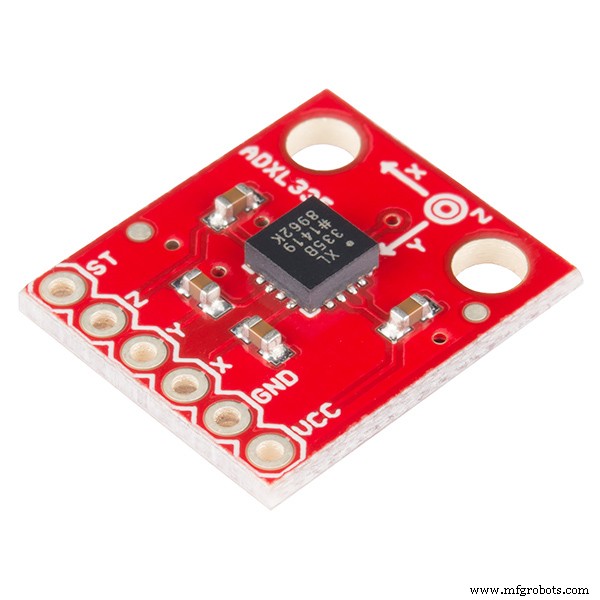
什么是加速度计 (ADXL335)?
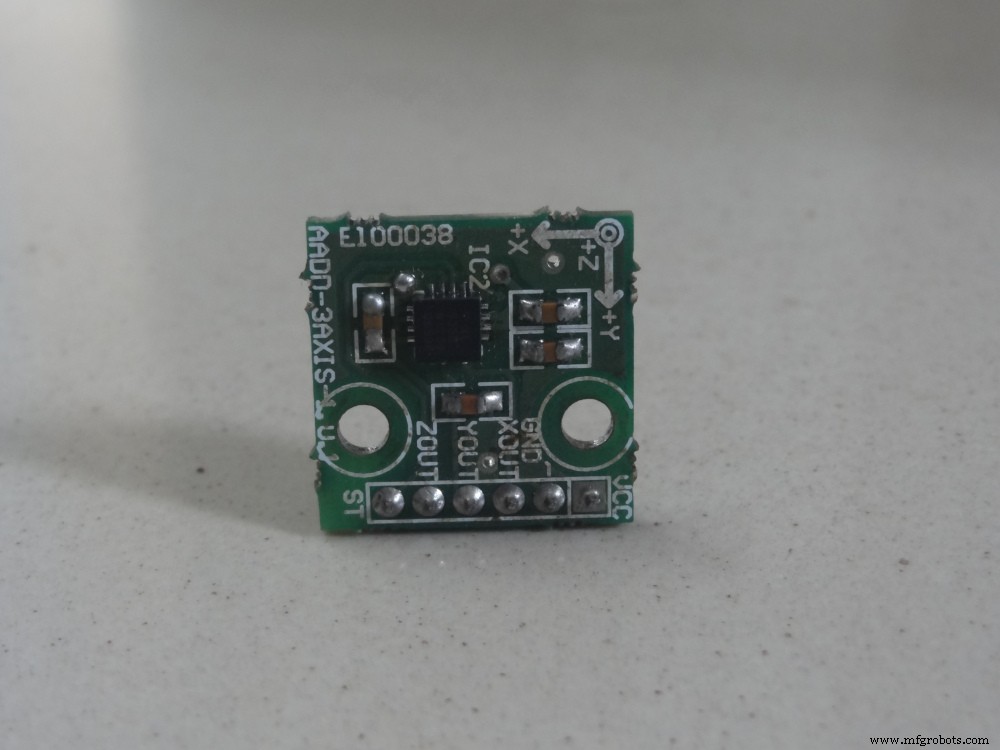
简而言之,加速度计是一种三轴加速度测量设备。这里使用的加速度计是ADXL335,它有3个轴(X Y Z)。
现在几乎所有的智能手机都有加速度计(即使我们不会从智能手机上拿它)。你肯定在你的手机上玩过动作游戏(例如神庙逃亡),当你分别向左和向右倾斜手机时,游戏中的角色会左右移动,这是由加速度计完成的。
在智能手机中发现了另一个称为陀螺仪的传感器,我们现在不需要。
它是如何工作和识别手势的?
这里机器人的大脑是 Arduino Uno (Atmega32),它被输入了一些代码。一种称为加速度计 (ADXL335) 的加速度测量设备可以识别用手做出的手势/动作。
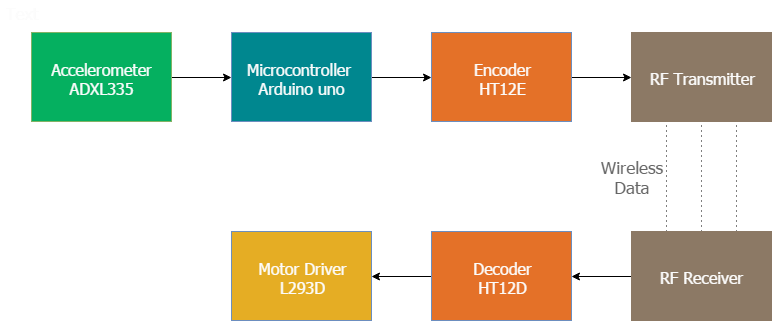
在这里,当我们用手做手势时,加速度计会读取 X Y Z 坐标,并将 X Y Z 坐标发送到 Arduino(这里我们不需要 Z 轴,我们只需要两个协调的 X 和 Y,因此忽略 Z 坐标)。 Arduino 检查坐标值并将 4 位代码发送到编码器 IC。编码器将数据传递给发射器,传输的数据由 RF 接收器接收。接收器将 4 位代码发送到解码器 IC,解码器将其传递给电机驱动器 IC。稍后,电机驱动器决定将两个电机转向所需的方向。
制作电源
首先,我们将从电源电路开始。我们需要两个电源电路:一个用于发射器,一个用于接收器。接收器电路需要使用 12V 电源供电(因为我使用的是 12V 电机),发射器电路可以使用 9V 电池供电。
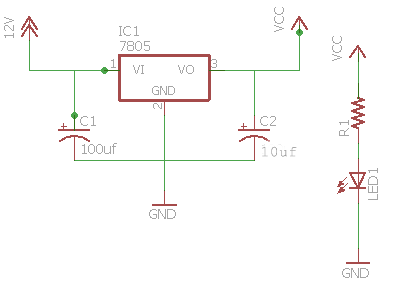
您可以在右侧看到接收器电源的电路。使用此图连接电源电路。也可以通过1k电阻加一个LED指示供电状态。
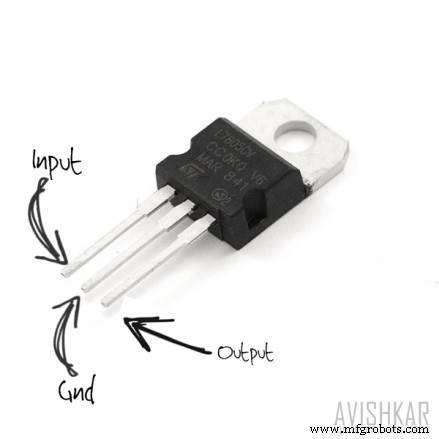
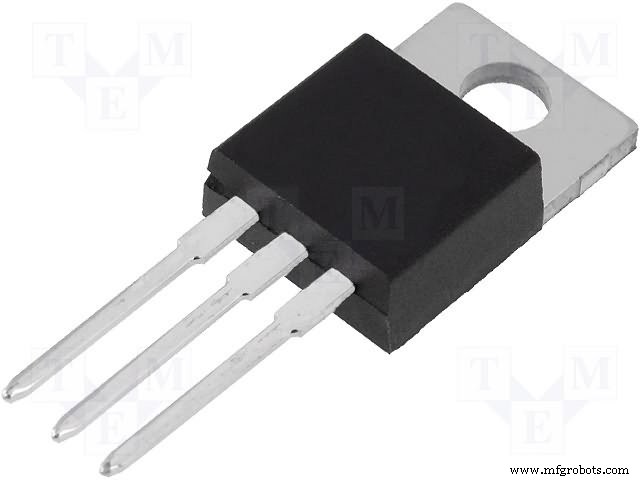
- IC 7805 可将 12V 电源调节为 5V(如果您无法获得 12V 电源,您可以使用 9V 电源)
- 0.1uf 和 470uf 电容器
- 用于状态 LED 的 1k 电阻
注意: 7805使用散热片,因为我们降7V (12-5 ),所以会产生大量热量烧毁稳压器,所以建议使用散热片。
让我们开始制作发射器(远程)
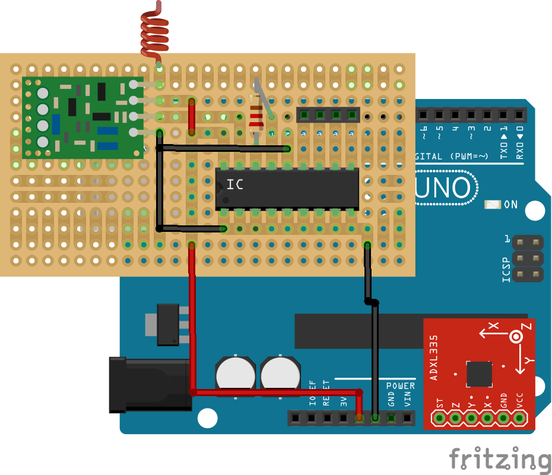
发射器部分包含一个加速度计,用于检测手势并将数据发送到 Arduino。之后Arduino根据从加速度计接收到的数据向Encoder IC发送数据,并将数据传输到接收器。按照以下电路接线:
注意: 请注意,有些加速度计使用 3.3V 电源,可能会被 5V 损坏。检查供应商的文档以找出正确的电压。
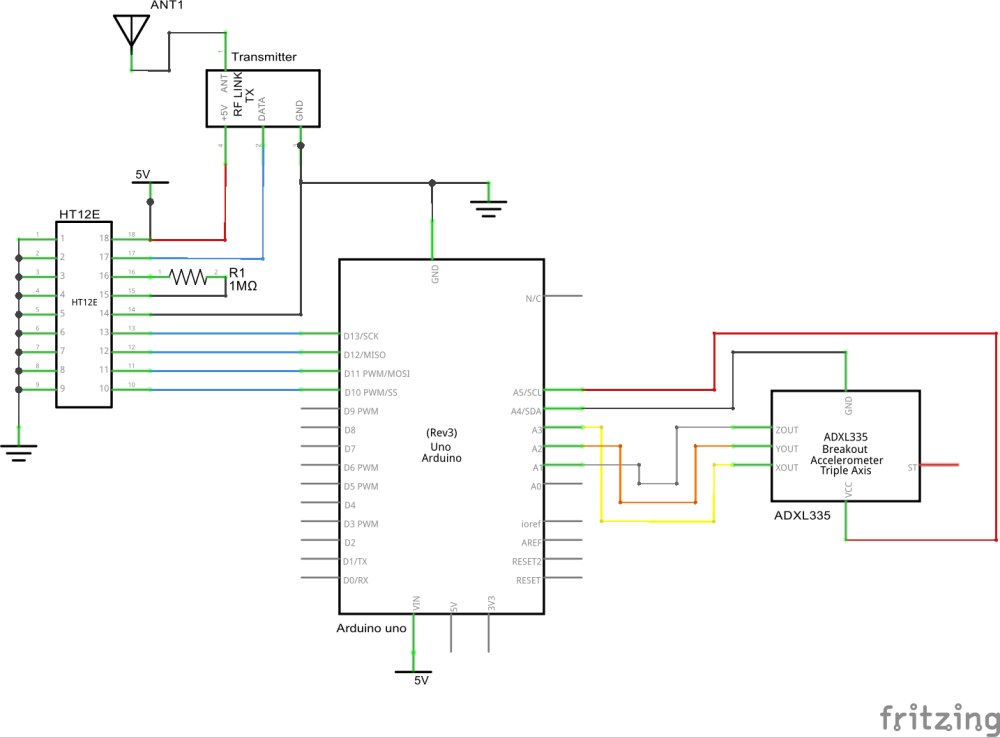
这只是发射器的示意图:
将代码上传到 Arduino
这是更新后的代码
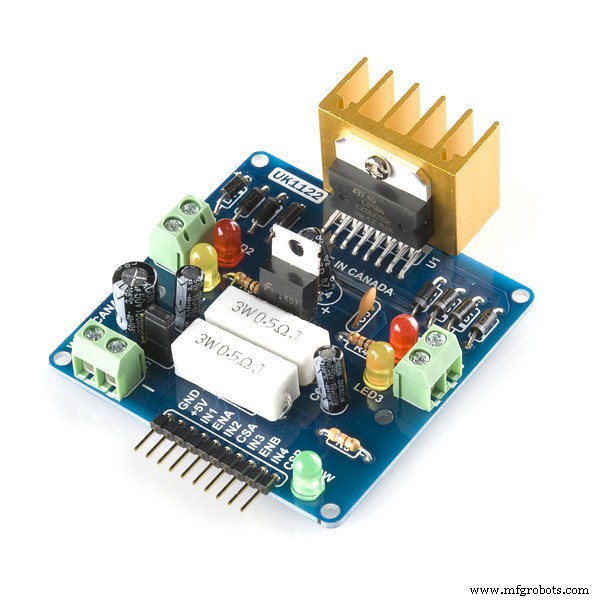
制作接收器
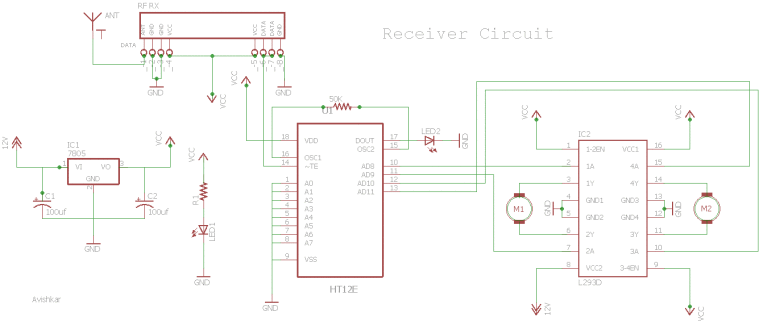
接收电路由2个IC(HT12D解码器、L293D电机驱动器)、RF接收模块组成。
按照上述接收器原理图连接电路。接收器板上有 2 个 LED,一个在给接收器供电时亮起,另一个在给发射器电路供电时亮起。 IC HT12D 附近的 LED 应该亮起,如果您的连接或 RF-TX-RX 模块没有问题,那么这会在发送器上电时为您提供有效的传输 (VT)。
如果您想详细了解接收器部分,请阅读本文。
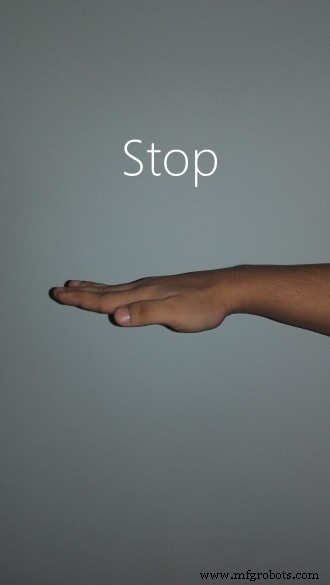
机器人会识别哪些手势?
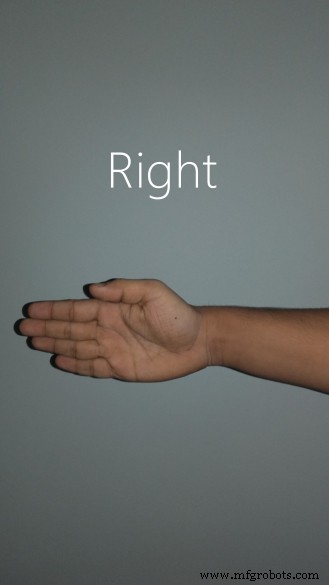
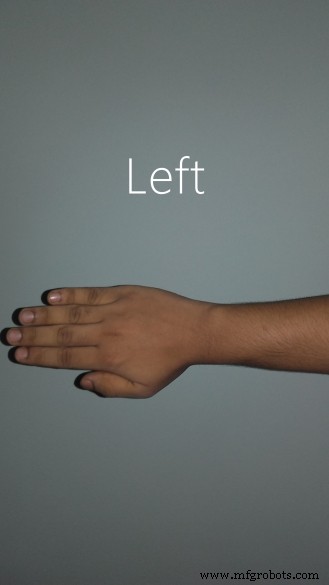
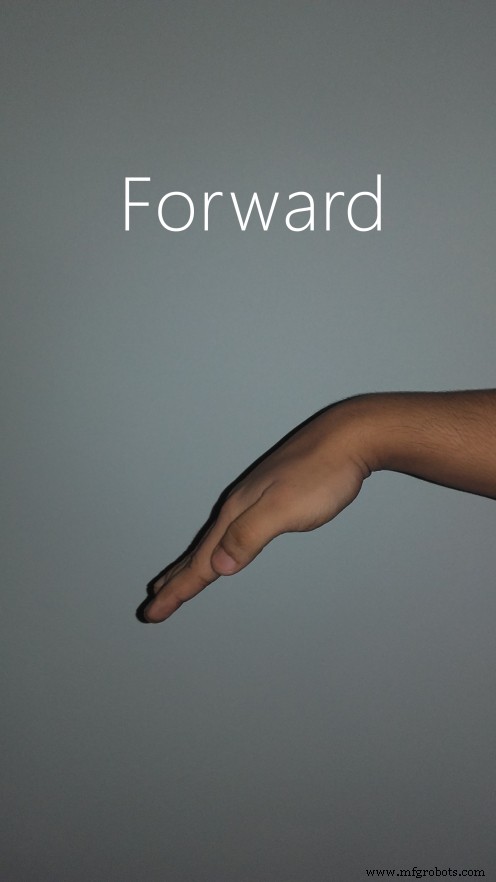
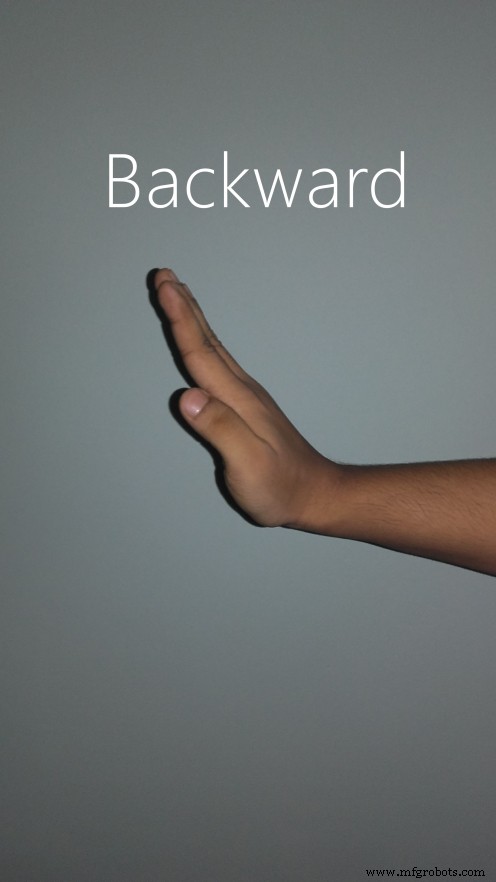
该机器人设计用于识别五组手势:向前、向后、向左、向右和停止。如果您查看下面给出的手势照片,您会得到更好的主意。
喜欢驾驶你的机器人。
将其缩小并使其永久化。
Arduino Uno 拿在手上又大又笨重。如果您决定使用 Arduino 制作另一个项目,您将需要移除 Arduino 及其上的所有连接,您将丢失旧作品。我不喜欢那样做,所以我想出了一个解决方案,让它成为一个永久的解决方案。您可以查看这篇文章以了解如何缩小您的 Arduino 项目。
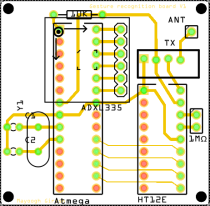
从这里(镜像)下载独立版本的 PCB 布局。
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdf观看此视频,其中我已将代码传输到 Atmega8 MCU。我只用 LED 显示了 MCU 的输出。
查看我的博客以了解我的新项目
如果您有任何疑问,请在此处发表评论。这是我的博客。我会在那里而不是在这里定期检查反馈。
制造工艺