

Matlab / Simulink中机器人夹持器的PID控制
在本教程中,我们将了解如何对机器人夹持机构的 3D 模型进行 PID 控制。 Simulink 模型由两个子系统组成。使用 Simulink 模块建模的直流电机子系统和使用 SimMechanics Link 从 Solidworks 导入的 3D 模型。我们使用步进函数来激活直流电机来驱动机器人夹持器,并且我们使用 Simulink PID Block 来自动调整 PID 的参数。
您可以观看以下视频或阅读下面的书面教程。
从此处的示例下载 Simulink 模型:
在以下链接中查找并下载机器人夹持机构的 3D 模型: 
Simulink 模型 - PID 控制
1 个文件 538.71 KB 下载 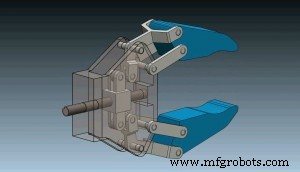
制造工艺