

工业机器人
背景
工业机器人是在一定程度上复制人类动作的机械设备。当需要减少对人类的危险、提供比人类更大的力量或准确性,或者需要连续操作时,就会使用它们。大多数机器人都是静止的,但有些机器人会在整个工作场所移动,运送材料和供应品。
许多人认为机器人是科幻小说和奇幻电影中出现的人形怪物。虽然我们有一天可能拥有生产这种机器的技术能力,但今天的机器人实际上是非常简单的设备。我们认为理所当然的动作——例如从桌子上拿起一枚硬币——对于机器人来说要困难得多。我们的大脑处理来自我们眼睛的数以千计的可变数据位,以指示我们的手臂、手腕、手和手指伸手去拿、抓住和捡起 硬币。 甚至硬币的触觉也会不断更新我们的大脑,以提供足够的手指压力来安全地握住硬币。任何位置的变化都会在我们的大脑中得到轻松补偿。为了轻松、经济地对工业机器人进行编程以执行相同的任务,必须限制或消除其中的许多变量。位置、伸手可及的距离、重量和抓握力应尽可能保持一致,以免变化导致丢失或掉落物体。控制机器人的计算机必须由技术人员编程,以“教”机器完成运动。机器人比人类表现更好的领域是准确性和可重复性。虽然有些人每次都可以用类似的动作捡起硬币,但机器人可以以完全相同的动作执行操作而不会感到疲倦。许多机器人可以以千分之几英寸的精度重复运动,并且一天 24 小时都在运行。由于这种孜孜不倦、精确的工作,机器人成为工业设备采购的一个不断增长的部分。大多数用于重复喷漆和焊接操作,而另一些被称为拾放机器人,用于将产品提升和放置到机器和包装中。
历史
机器人或“机器人技术”是更广泛的自动化科学的一部分。自动化使用可以学习或补偿不同操作条件的机器和计算机。机器人一词可以追溯到捷克词 robotsa, 这意味着强制劳动。这个词最早出现在 1921 年的戏剧“R.U.R.”中。 (罗森的通用机器人)由捷克剧作家卡雷尔·卡佩克 (Karel Capek) 创作。该剧描述了摧毁人类制造者的人形机器人——与一些现代科幻惊悚片的情节大致相同。
实用机器人是在计算机发展起来之后首次尝试的。 1960 年代后期,斯坦福研究所设计并制造了一种名为“SHAKEY”的实验机器人。使用电视摄像机和计算机,这台机器能够移动和排列积木成堆。通用汽车公司在 1970 年代中期资助了麻省理工学院的一项计划,以开发用于组装目的的自动化机器人。在这里,研究员 Victor Scheinman 发明了 PUMA(用于组装的可编程万能机械手),机器人开始进入美国工业。
原材料
机器人大多由普通材料制成。一些用于洁净室应用、太空计划或其他“高科技”项目的专用机器人可能会使用钛金属和碳纤维结构复合材料。所需的操作环境和强度是材料选择的主要因素。
钢,铸 铁, 铝最常用于机器人的手臂和底座。如果机器人是移动的,他们通常会为它们配备橡胶轮胎,以实现安静的操作和对地板的积极抓地力。机器人包含大量的电子设备和电线,有些是无线电或激光控制的。气缸和其他运动产生机构包含液压油或压缩空气。硅胶、橡胶和不锈钢编织软管将这些机构连接到它们的控制阀。为了保护机器人免受环境影响,一些暴露区域覆盖有柔性氯丁橡胶防护罩和可折叠波纹管。电动机和线性驱动器与控制器或“大脑”一起从自动化供应商处购买。控制器安装在机器人工作区附近的钢制电气柜中,或携带在机器人本身上。
制造
过程
设计
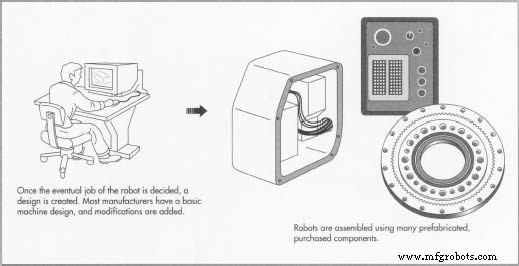
- 1 每个机器人都从设计阶段开始。在设计中必须考虑这些和其他因素:要执行的工作;操作速度;运行环境;涉及的危险材料;可达长度;旅行路线;过程变量;人为参与;控制器能力;和失败的结果。
大多数制造商都有一个基本的机器设计,他们在其中加入了修改和附件,以满足应用程序的特定要求。
 第一个安装在美国工业上的机器人,这个Unimate“pick-and-place”uni)第一个1961 年,他在新泽西州特伦顿的一家通用汽车工厂从压铸机中取出热金属零件。 (来自亨利福特博物馆和格林菲尔德村的收藏。)
第一个安装在美国工业上的机器人,这个Unimate“pick-and-place”uni)第一个1961 年,他在新泽西州特伦顿的一家通用汽车工厂从压铸机中取出热金属零件。 (来自亨利福特博物馆和格林菲尔德村的收藏。)
机器人,就像任何工具一样,取决于使用它们的人。他们不能做他们没有设计或编程去做的工作。当整个系统和流程被仔细规划时,它们是最有效的。此外,负责它们的工人也必须接受充分的教育和培训。
1980 年代,通用汽车公司在新技术上花费了超过 400 亿美元,在机器人上花费了数亿美元。不幸的是,该公司在了解机器人应该彻底改变的系统和流程或维护和操作机器人的人员方面几乎没有投入足够的资金。位于密歇根州哈姆特拉克的通用汽车工厂本应是该公司的展示场所。相反,到 1988 年,它成为了一些技术乌托邦主义最糟糕的地方。生产线上的机器人有时会互相喷漆,而不是擦身而过的车身;机器人偶尔会失控撞到过往车辆;一个设计用于安装挡风玻璃的机器人被发现有系统地砸碎它们。有一次,当机器人停止工作时,技术人员不知道如何修复它。匆忙打给制造商的电话把一名技术人员带到了下一架飞机上。他看着机器人,按下“重置”按钮,机器再次运行。
威廉 S. Pretzer
制作
- 2 设计完成后,底座、臂、柱和支架就制作完成了。基地是
 通常很重,防止机器人翻倒。它是通过铸造或焊接制成,然后加工而成。许多机器人制造商使用机器人来焊接新零件。
通常很重,防止机器人翻倒。它是通过铸造或焊接制成,然后加工而成。许多机器人制造商使用机器人来焊接新零件。 那些与机器人其余部分配合的区域在加工时采用严格的尺寸控制,以确保连接组件的正确安装和操作。同样,主柱和臂的构造可以准确地装配到最终组件中。
组装
机器人使用大量外购部件组装而成,例如电动机、液压缸、轴承、接线、控制器和其他重要部件。一个工业机器人可以包含 2,000 个单独的零件,并由团队组装。这些团队从底座开始,将组件组装到机器人中,直到它完成并准备好进行测试和完成。
为了开始组装过程,移动机器人首先安装牵引电机、电池、车轴、车轮和轮胎。固定式机器人不需要这些物品。它们在组装过程中暂时用螺栓固定在地板上以保持稳定性。移动立柱和移动臂与各自的驱动电机组装在一起,然后连接到底座上。底座包含一个环形齿轮,由电机驱动以提供旋转运动。它必须与包含在柱中的驱动齿轮紧密配合。推力轴承支撑底座上的柱和臂的重量。一个磁性刻度围绕着轴承并向控制器提供电子位置反馈。
链接
- 3 下一个关节是链接。它的作用类似于肘部,将手臂连接到底座。稳定器支撑为连杆提供位置控制,使其能够沿预定路径移动。这些组件包含轴承座,枢轴用螺栓固定在轴承座上。每个轴承都经过预润滑或配有润滑管线或配件。该链接包含一个位置传感器,可向控制器提供另一个位置信号。
手臂
- 4 臂组装到连杆的直立部分。它为机器人提供最大的“触及范围”并支撑手腕。手臂包含操作手腕的驱动轴。三个马达,或马达和液压缸的组合,
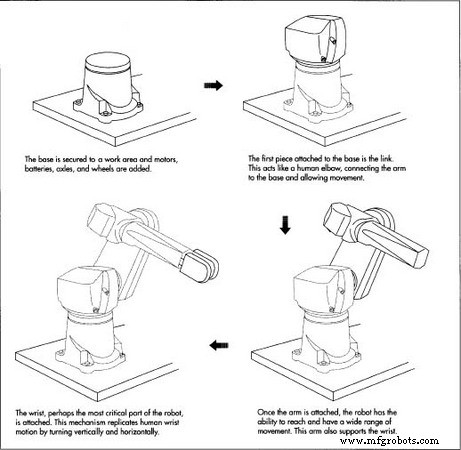 一个工业机器人可以包含 2,000 个单独的零件,由团队组装。这些团队从底座开始,将组件组装到机器人中,直到它完成并准备好进行测试和完成。连接到驱动轴。由于手臂和连杆关节必须承受手腕的全部负荷,这是通过大轴承和枢轴销实现的。
一个工业机器人可以包含 2,000 个单独的零件,由团队组装。这些团队从底座开始,将组件组装到机器人中,直到它完成并准备好进行测试和完成。连接到驱动轴。由于手臂和连杆关节必须承受手腕的全部负荷,这是通过大轴承和枢轴销实现的。
手腕
- 5 手腕是机器人的关键机构。通过扭转和转动将喷枪、焊机或其他工具放置在正确位置,手腕最能复制人类运动。许多机器人的手腕上还装有负载感应电子设备,以便在遇到障碍物或负载太重而无法安全拿起时发出信号。额外的位置传感器和工具控制电子设备也组装到手臂和手腕上。
控制器接线
- 6 机械组装完成后,即可完成机器人的布线和管道铺设。全部
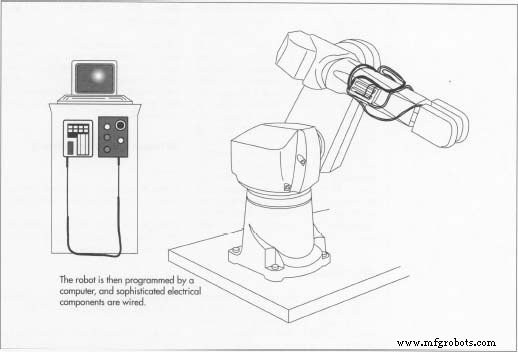 电机的传感器和电气元件必须有电线供电并将信息传回控制计算机。有时,臂和底座中未使用的空间提供了一个方便的地方来安装一些控制器电子设备,从而缩短了布线路径。液压缸和气缸有软管,可承载压力以操作它们,由底座中的阀门控制。这些电线和软管中的大部分都被路由回控制柜,对于移动机器人,该控制柜连接到底座。如果机器人是静止的,这个控制器通常安装在几英尺远的地方,并通过脐带连接。组装后,机器人的手臂和立柱有时会覆盖上防护装置和防护罩,以保护它们免受喷漆、焊接火花或环境中的其他危害。
电机的传感器和电气元件必须有电线供电并将信息传回控制计算机。有时,臂和底座中未使用的空间提供了一个方便的地方来安装一些控制器电子设备,从而缩短了布线路径。液压缸和气缸有软管,可承载压力以操作它们,由底座中的阀门控制。这些电线和软管中的大部分都被路由回控制柜,对于移动机器人,该控制柜连接到底座。如果机器人是静止的,这个控制器通常安装在几英尺远的地方,并通过脐带连接。组装后,机器人的手臂和立柱有时会覆盖上防护装置和防护罩,以保护它们免受喷漆、焊接火花或环境中的其他危害。
安装
安装在用户站点进行。如果 / 静止,机器人用螺栓固定在地板上。如果移动,则将导丝埋入地板中,以便机器人跟随任务执行任务。它通过无线电信号跟随电线,也使用电线与中央控制器通信。最近,激光已被用于消除导线。机器人被墙壁反射的激光束引导通过其路径。一些设计还包含摄像机。固定应用通常需要在机器人周围建造围栏,这样毫无戒心的人就不会进入机器人的工作区域而受伤。安装完成后,机器人制造商通常会向客户提供操作和维护培训。
质量控制
测试由两部分组成:功能准确性和称为“老化”的过程。一旦组装好的机器人通电,计算机程序就会指示控制器通过一系列运动来移动机器人手臂。准确记录这些动作,纠正任何问题。然后将机器人连续投入运行数小时。这称为老化,它有两个功能。首先,可以使用来自功能测试的数据检测任何精度损失。这种情况表明存在设计问题、装配松动、轴承有缺陷等。其次,试运行使电子设备和液压系统达到工作温度。这很重要,因为控制器是用称为偏移量的校正因子编程的。这些偏移补偿来自位置传感器的反馈以允许组件的温度变化。机器预热后,程序员可以将校正因子放入程序中以提供最佳性能。
未来
机器人技术是工业机器市场中增长最快的领域之一。主要受计算机技术进步的推动,旧机器人很快就会被新型号淘汰。日本公司正在引领机器人技术的发展,他们的许多设计都融入了新的人工智能科学,使机器人能够自行“学习”和“适应”他们的操作。
相机和电子视觉的进步也将影响 1990 年代的机器人。许多机器人将进入新的使用领域,例如医疗和食品服务,这将使更多的人与它们接触,而不是以前在工业工作场所发生的情况。
制造工艺