

机器人的未来
机器人的未来是分布式的。任何复杂的机器人都是一组分布式的模块和系统,有些是自主的,有些是半自主的,有些是人为控制的,所有这些都紧密地结合在一起,形成一个由互操作部件组成的单一内聚系统。在远程机器人技术中,我们寻求实现机器人的远程操作,并通过向人类操作员提供视频和互动力,让操作员感受到机器人正在部署的位置。
对于欧空局来说,这意味着在太空或敌对的行星表面。人类操作员可能在空间站甚至回到地球!
为此,我们通过对操作员的触觉力反馈与增强现实视频相结合来实现远程呈现。
向用户提供视觉和触觉反馈可实现远程呈现。反馈越真实、信息化,操作者的临场感就越强,从而更好地实现远程机器人操作。
欧空局太空遥操作面临的关键挑战是通信链路。机器人中有很多实时控制回路,但远程操作系统中人与远程机器人之间的实时控制回路是最有问题的。多个控制回路运行在数据包交换网络链路上,该链路表现出最糟糕的通信行为。它可以随时断开连接,延迟通常可以以秒为单位测量并且变化很大,而且丢包是经常发生的;这对于通过互联网和跨空间进行的通信来说都是正确的。然而我们必须通过这个链接发送所有视频,时间与机器人控制状态和两端的控制命令相关。这意味着链接状态必须成为控制回路的一个组成部分,在两端提供足够的信息,以便操作员做出适当的反应,并使远程机器人保持安全稳定的状态。链接状态必须成为系统状态的一个组成部分。
ESA 的开发团队由机电工程师、计算机视觉专家、控制系统理论家和少数软件工程师组成。我们在早期就很清楚,我们需要寻求一种通用的方法来讨论系统需求和接口,尤其是当被要求交付涉及多台计算机、不同硬件和软件平台的复杂分布式系统时;我们解决了数据。我们将数据视为理解系统状态的一种手段、一种表示视频帧的手段和一种表示控制理论的手段。因此,以数据为中心来处理我们的开发环境和系统开发是有意义的。再加上作为远程操作的一部分了解链路状态的迫切需要,我们不得不评估 DDS(数据分发服务)。 NASA 已经是其空间通信系统中 DDS 的重度用户——但 DDS 是否也能通过如此具有挑战性的链路实现远程操作,从而实时控制真正最具挑战性的连接?这是一个新的未探索的科学领域,因此更加令人兴奋。初步迹象非常令人鼓舞。
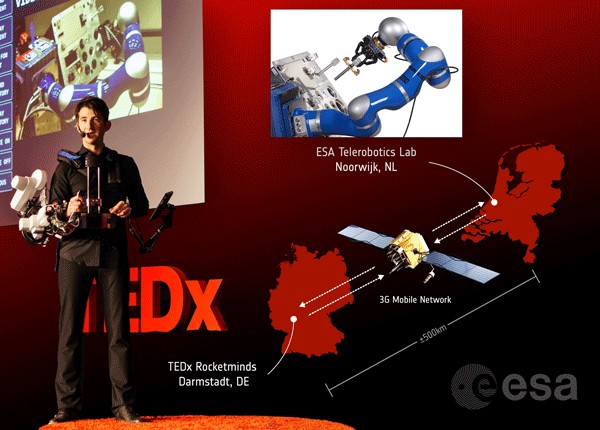
在 2014 年 5 月的 TEDx RheinMain RocketMinds 现场演示中,我使用我们的 EXO-1 外骨骼臂原型远程控制物理上位于我们 ESA Telerobotics 中的机械臂和触觉实验室超过 500 公里。我的任务是拿起一个金属销并将其放入间隙公差小于 0.5 毫米的孔中。整个演示是通过基于 Internet 的 2G 电话 WAN 连接运行的,因为计划中的 3G 连接意外不可用!在封闭的房间里,挤满了口袋里装着手机的人,带宽受到严重限制,实际上表现出在太空中体验到的连接类型——或者实际上更糟。没有比这更糟糕的了,通过链接进行远程操作,延迟在 15 秒范围内,数据丢失严重。尽管如此,运行在 2G 链路上的 DDS 设法处理触觉反馈、机械臂控制回路和实验室中机械臂视频的所有通信(流到我手臂上的平板电脑并在本地克隆以显示在TEDx 主屏幕)。
它可能还没有在太空中,但是远距离的精确遥控机器人以及具有视觉和触觉反馈的挑战性数据链确实在我们的掌握之中,我们已经向广大观众展示了这一点.
更新 :Haptics-1 实验是由 NASA 宇航员 Barry Wilmore 在国际空间站上进行的。 2014 年 12 月 30 日进行了第一次预测试。 Haptics-1 是太空中第一个机器人力反馈实验。恭喜!阅读更多
有史以来第一次在太空中使用#haptic 反馈!今天@Space_Station#haptics-1 正在成功进行! pic.twitter.com/30zD5GzGqs
— ESATelerobotics (@ESATelerobotics) 2014 年 12 月 30 日
如果您有关于使用 Connext DDS 的故事想要分享,请发送电子邮件至 blogadmin@rti.com。
物联网技术