

AccuFast II 快速且高质量地处理接缝
Yaskawa Motoman 提供了多种接缝查找工具,可以像 AccuFast II 一样快速准确地定位接缝。零件并不总是出现在一致的位置,因此很难找到焊缝。接缝查找工具将轻松定位上部和下部并在移动时进行调整。使用接缝查找工具定位上壁或下部部件有助于确定焊缝的最佳位置。
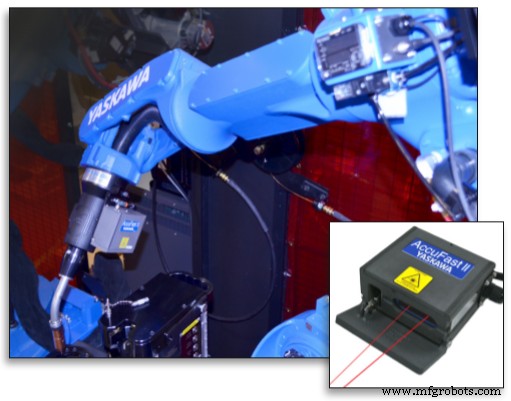
AccuFast II
AccuFast II 是一种紧凑的附加功能,可与任何 Motoman 焊接机器人的焊枪串联安装。它与 Motoman 行业领先的 MA 和 VA 系列穿臂机器人以及标准 6 轴机器人兼容。 AccuFast II 具有以下强大功能,一定会提高您的焊接质量并缩短周期时间。
改进的传感器
AccuFast II 带来了改进的传感器功能,可提供更高的可靠性。它为以前不可行的更广泛的材料和角度提供了更多的读数。它还可以向机器人控制器提供有关零件位置的可重复反馈。这些功能为生产线带来了更高的性能。当到达焦点时,点激光向机器人提供输入。
缩短周期时间
缩短了循环时间,因为不再需要在焊缝之间切割焊丝,同时由于不再需要弯曲焊丝,因此能够以更快的速度进行搜索。
点激光
AccuFast II 使用点激光,当激光到达其编程焦点时搜索和检测工作表面。它类似于触摸感应,因为编程使用相同的宏作业,但 Accu Fast II 是非接触式的,速度明显更快。
较薄的部分
用户可以选择 AccuFast II 来检测较薄的零件并检测具有适度间隙的方形对接接头。边缘检测宏例程提供间隙宽度测量。它还可以找到内外圆和圆弧。
高兼容性
它与多种材料兼容,不受环境照明和大多数表面的影响(反光表面可能会降低性能)。此外,AccuFast II 具有针对不同关节类型的内置作业。触摸感应选项可以与 AccuFast II 结合使用,以检测可能存在光学干扰的接头。
受保护的传感器
传感器封装在带有气动百叶窗和正气压的外壳中,以保护其免受焊接飞溅和烟雾的影响。激光放大器安装在安装在机器人上臂的钢制外壳中。它的设计允许在不打开外壳的情况下进行设置和调整。放大器免受焊接环境影响。
易于改造
Accufast 传感器使用与传统触摸传感相同的输入和输出信号,使其易于改装到现有的机器人装置中。如有必要,AccuFast II 可与 ComArc 通弧焊缝跟踪结合使用,用于焊接时可能变形的轮廓零件或长焊缝。
Simple Programming
Macro job routines simplify programming by providing a single instruction in the robot job for detecting a seam or feature. Macro job routines are provided to automatically detect three surface locations then calculate the radii and center point offset.
Auto-Teach further helps to make the programming of the sensors easy and accurate as it helps determine the optimal search direction perpendicular to the work surface. It will automatically find the taught part location and the part orientation. The robot will search perpendicular to the joint wall, even if the part is positioned at an angle.
Contact Us
AccuFast II is sure to bring increased product quality and reliability to your welding line. Contact our experts today with any questions you may have about AccuFast II and how it can be added to your Motoman welding robot. RobotWorx is proud to be a certified integrator for Motoman robotics; representatives can be reached online or at 877-762-6881.
工业机器人