

无限齿轮
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
|
关于这个项目
Arthur Ganson 建造了一个鼓舞人心的雕塑,名为“Machine with Concrete”,由 12 级 1/50 传动比的齿轮连接在一起组成。第一档以 200 rpm 的速度旋转,完全旋转需要 1/200 分钟。猜猜最后一个齿轮(埋在混凝土中)的完整旋转时间:137 亿 (10^12) 年!
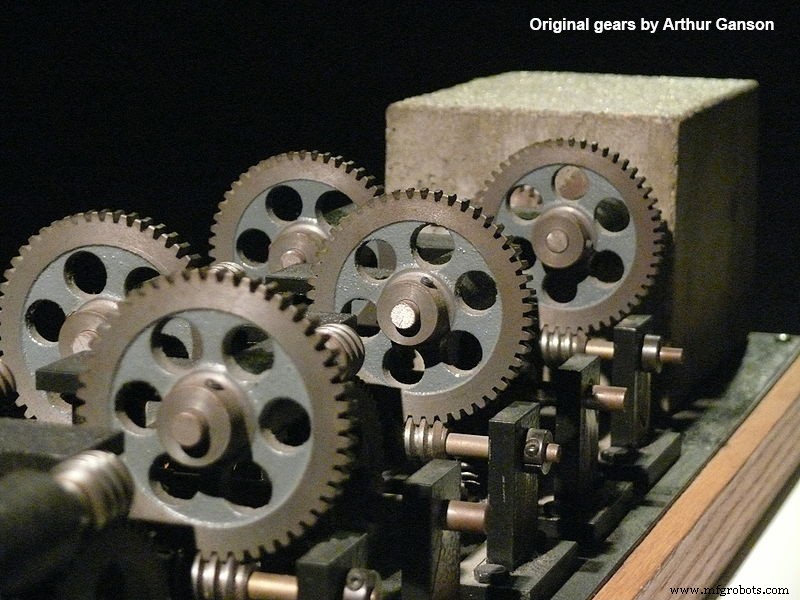
无论您转动第一档有多快,您在系统内的努力都会减少。生活是相似的,感觉也是相似的。我们做了很多事情,但这些事情对宇宙的贡献很少。所以我们能做的最好的事情就是做我们喜欢做的事情,让我们开心的事情!
因此,我们创建了一个类似的项目,INFINITY GEARS,以更紧凑的形式在不同阶段带有旋转计数器开关,由 Arduino Uno 驱动。我们用 250 rpm 的直流减速电机转动第一档。
猜猜我们最后一个齿轮的完整旋转时间!? ------> 等待它-------> 346 Quintillion (346 x 10^18) 年!即使是宇宙(很可能)也不会看到完整的旋转!这就是我们将最后一个齿轮设计为“不可旋转方齿轮”的原因。
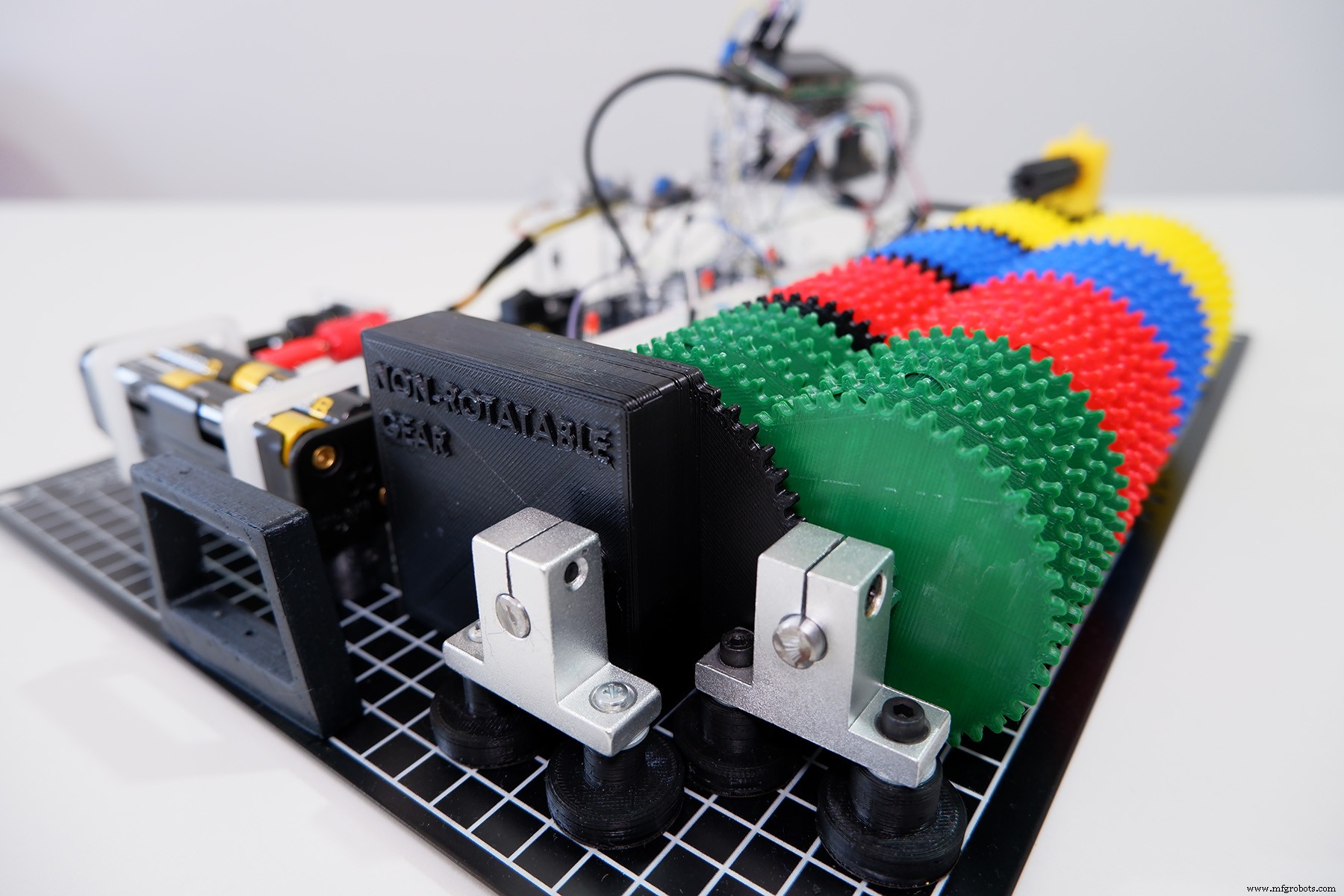
我们项目中的所有齿轮都是彩色 3D 打印的,除了 5 个黑色齿轮,上面有小磁铁(电机轴上有 +1 个黑色齿轮,没有磁铁)。它们的旋转由连接到 Arduino Uno + 2x16 LCD 的簧片开关 + LED 进行计数。
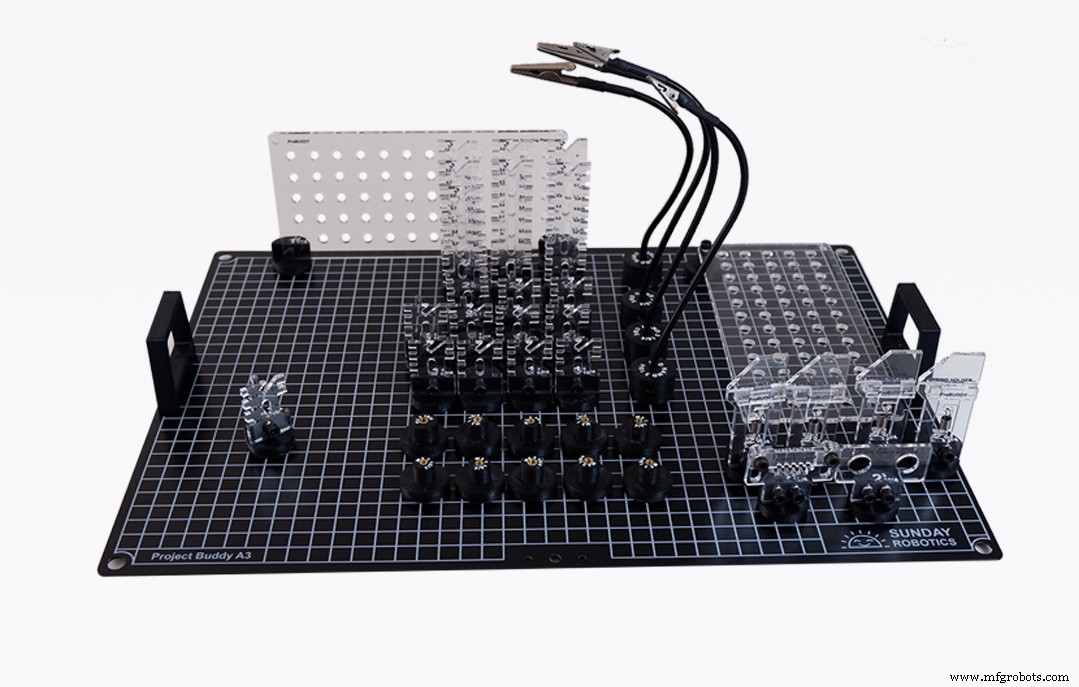
我们已经在 A3 大小的 ProBUDDY 套件上构建了该项目,这在构建、存储和携带您的项目时提供了很多帮助和简化。 (即将于 2022 年 1 月 11 日在 Kickstarter 上发布)产品页面:https://www.sundayrobotics.com/probuddy/
第一个黑色齿轮在 0.002 分钟内完成完整旋转,很容易看到..
然而,第二个黑色齿轮在 135 天内完成了它的完整旋转!如果你等这么久..
第三个黑色齿轮,OMG,将在 360 万(3.6 x 10^6)年完成它的完整旋转!
4th Black gear,天哪,35 万亿(35 x 10^12)!
5th Square Black Gear,OOOOOOMMMMMMMGGGGGGG,346 Quintillion (346 x 10^18) 年! (宇宙会看到它旋转吗?不确定!)
代码
- Arduino Uno 代码
Arduino Uno 代码Arduino
#include/* 该库必须包含在 LCD 屏幕使用中。 */液晶液晶(12, 11, 5, 4, 3, 2); /* 连接 LCD 的 Arduino 引脚。 *///* 簧片开关传感器定义。 */int reed1 =6;int reed2 =7;int reed3 =8;int reed4 =9;int reed_status1, reed_status2, reed_status3, reed_status4; /* 计数器定义。 */int counter1 =0;int counter2 =0;int counter3 =0;int counter4 =0;void setup() { lcd.begin(16, 2); /* 指定 LCD 的行列号。 *//* 要写入 LCD 第一行的文本。 */ lcd.setCursor(0, 0); lcd.print("SUNDAY ROBOTICS");/* 要写在 LCD 第二行的文本。 */ lcd.setCursor(0, 1); lcd.print(" INFINITE GEARS");/* 簧片开关设置为输入。 */ pinMode(reed1,INPUT); pinMode(reed2,INPUT); pinMode(reed3,INPUT); pinMode(reed4,INPUT);延迟(1500); /* 启动画面将等待 1500 毫秒。 */}void loop() {/* 读取簧片开关传感器状态,然后将状态传递给变量。 */ reed_status1 =digitalRead(reed1); reed_status2 =digitalRead(reed2); reed_status3 =digitalRead(reed3); reed_status4 =digitalRead(reed4);//如果簧片开关状态为0,系统等待100毫秒,计数器加1。 */ if(reed_status1 ==0){ delay(100);计数器1++; } else if(reed_status2 ==0){ 延迟(100);计数器2++; } else if(reed_status3 ==0){ 延迟(100);计数器3++; } else if(reed_status4 ==0){ 延迟(100);计数器4++; } } lcd.clear(); /* 清洁液晶屏。 */ /* 要在启动画面后写入的文本。 */ lcd.setCursor(0, 0); lcd.print("无限齿轮"); /* 计数器值写在第二行。 */ lcd.setCursor(0, 1); lcd.print("F:");液晶打印(计数器1); lcd.print(" S:");液晶显示(计数器2); lcd.print(" T:"); lcd.print(counter3); lcd.print(" F:"); lcd.print(counter4); lcd.print(" F:"); lcd.print(counter5); }
定制零件和外壳
我们将有 41 个正齿轮 + 电机齿轮连接在一起。每个齿轮的外侧有 45 个齿,内侧有 9 个齿。电机齿轮也有9个齿。在每个阶段,齿轮比为 1/5。从电机齿轮到末端齿轮,我们有 41 个连接在一起的阶段。这使得 1/ (5^41) 齿轮比。
电机齿轮在 1/250 分钟内完成其完整旋转。对于最后一个(方形)齿轮,需要 (1/250) * (5^41) =1,8x10^26 分钟!
那是 3.03x10^24 小时!
那是 1,26x10^23 天!
那是 3.46x10^20 年!
那是 346 个 Quintillion 年!
示意图
伙计们,我们的电源是串联的 8 节 AA 碱性电池。我们有一个 6V 直流电机和 5V Arduino Uno + LCD + 电路的其余部分。因此,我们为此使用了 2 个 LM2596 稳压器。在每个黑色齿轮中,我们都有一块磁铁。我们总共有 4 个磁铁。在它们旁边有一个簧片开关,它连接到 LED 和电阻器以及 Arduino Uno 引脚。当磁铁经过簧片开关旁边时,我们将在 Arduino 引脚上从高到低再到高过渡。
我们有一个 2x16 字符 LCD 来显示旋转计数。

制造工艺