

将遥控车变成蓝牙遥控车
组件和用品
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
 |
|
应用和在线服务
| |
|
关于这个项目




遥控汽车真的很有趣,它们以低廉的价格提供良好的底盘,用于制造机器人,但选择一个制造机器人是一种痛苦的数以百万计的类型。我弟弟最近过生日,我想给他一些很酷的东西,我最终把这辆遥控车送给了他。遥控汽车黑客也很容易和艰难,因为遥控汽车的制造方式不同,它并不能简单和明确地破解汽车,但这种黑客是普遍的。我还将尝试涵盖每个模块背后的所有部分和理论的基础知识。我们已经使用了模块,但鼓励您制作我们的电路,pro mini 除外。
我对 promini 真的很不舒服,因为它太小了,但很有趣。
查看视频并确保订阅即将发布的视频
第 1 步:获得合适的机箱



零件清单
- ProMini
- L293d 模块
- hc-05
- 遥控车
获得合适的底盘
选择底盘是一个驱动机构的问题,驱动机构很多。
让我们谈谈两种最流行的机制。
差分驱动什么是差分驱动?
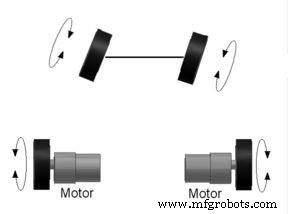
差分是指两个实体之间的差异,在机器人学的上下文中,它只是两个电机之间的速度差异。基于这种速度差异,机器人可以在二维布局上向任何方向移动。
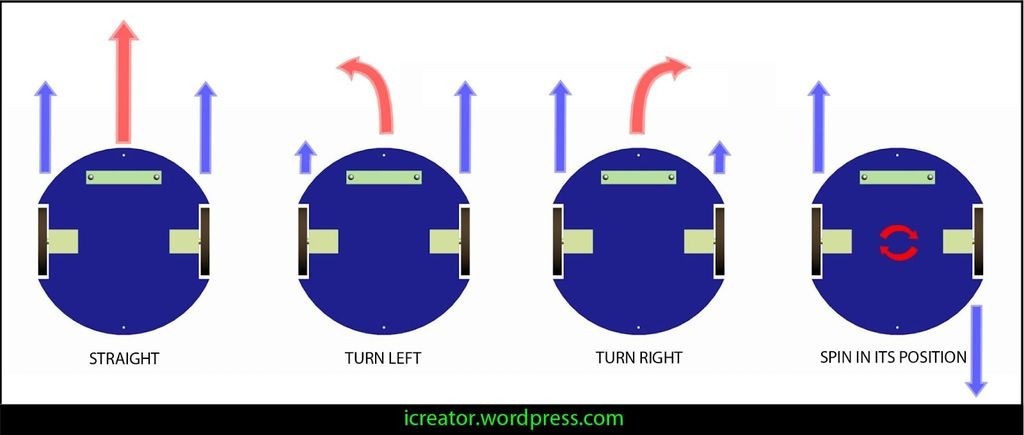
当两个电机连接在一条直线上的轮子上时,彼此相对(就像一对轮子连接到一个轴上一样)每个电机的旋转速度决定了运动的方向。当两个轮子以相同的速度旋转时,电机之间的差异为零。这使得机器人沿直线向前移动。如果两个电机的旋转方向相反,机器人可以反向移动。如果速度差为零,这将再次处于一条直线上。现在改变任何一个电机的速度都会导致向远离直线的方向运动。例如,降低右侧电机的速度将导致速度差,从而改变方向。合力使得机器人向右转。通过进一步降低电机的速度,可以将这种方向变化控制到所需的角度。正确的电机速度越慢,向右转的速度越快。这与左转完全相同。
结论是,右电机速度越慢,右转速度越快。左电机速度较慢 左转速度较快。下面是一些解释差动驱动机构工作的场景。 M1和M2分别是驱动左右轮的电机。
转向型驱动
什么是转向型驱动?
汽车式驱动器在现实世界中最常见,但在机器人世界中并不常见。它的特点是一对驱动轮和一对单独的转向轮平移和旋转是相互独立的。但是平移和旋转是相互关联的,因此该系统面临严重的路径规划问题。与三个或两个轮子相比,四个轮子的效率更高。四个轮子中的前两个可用于转向,后两个可用于驱动机器人。平衡四轮机器人从来都不是问题。我们日常使用的汽车大多是四轮的,这个例子足以证明它的存在和能力。
汽车驱动的缺点 :必须准确控制转动机构。轻微的不准确可能会导致大的里程计误差 系统是非完整的,因此路径规划非常困难且不准确 没有直接的定向执行器
所以最好使用差动驱动,因为它简单易用。
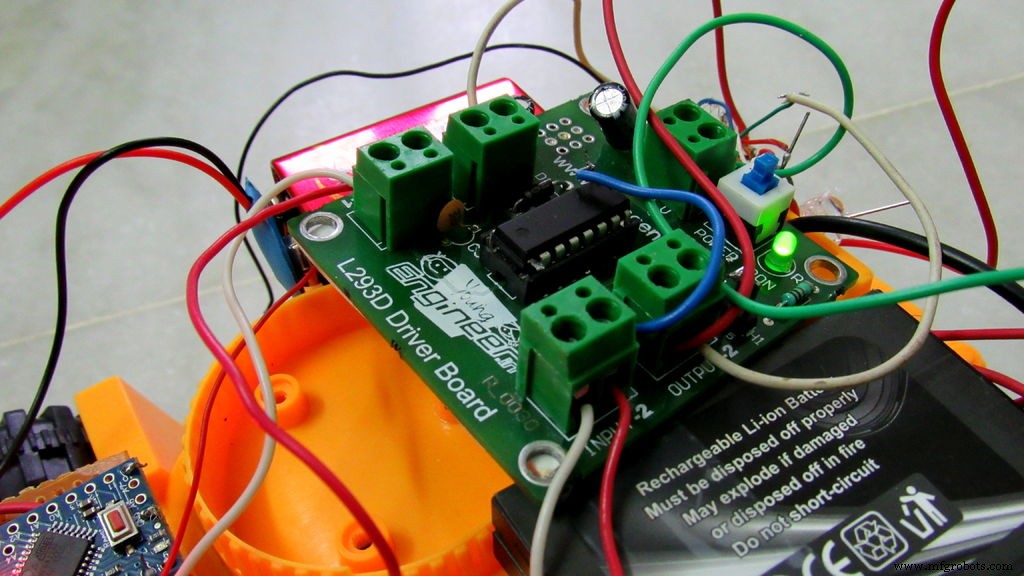
第 2 步:控制电机
为了控制电机,我们需要一种叫做电机驱动器的东西。
什么是电机驱动器?
电机驱动器是一个小的电流放大器;电机驱动器的作用是将一个低电流的控制信号转变成可以驱动电机的高电流信号。
有很多电机驱动器,其中我使用的是l293d电机驱动器模块。
L293D是电机驱动集成电路,用于驱动直流电机向任一方向旋转。它是一个 16 针 IC,可以同时控制一组两个直流电机。 L293D 本身使用 5V 供电,需要外接电源来驱动电机,最高可达 36V 和 600mA。 L293D 基于典型 H 桥的概念,该电路允许高压在任一方向流动。在单个 L293D IC 中有两个 H 桥电路,可以独立旋转两个直流电机。
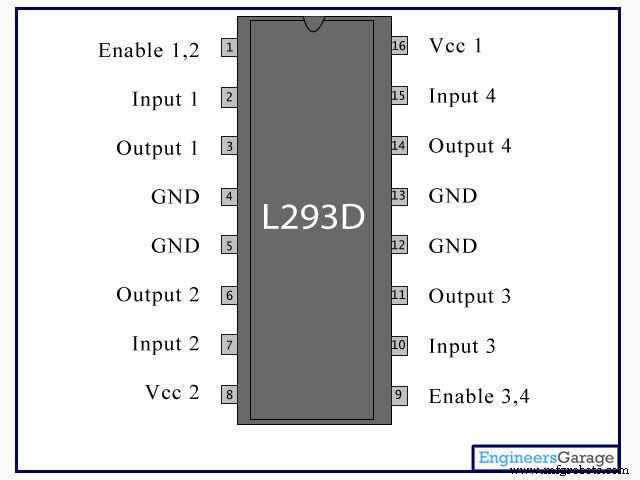
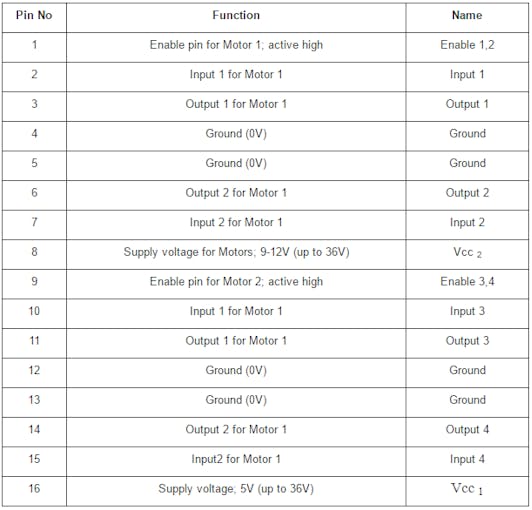
L293d 引脚说明
1电机1的使能引脚;高电平有效 Enable 1,2 2 Input 1 for Motor 1 Input 1 3 Output 1 for Motor 1 Output 1 4 Ground (0V) Ground 5 Ground (0V) Ground 6 Output 2 for Motor 1 Output 2 7 Input 2 for Motor 1 Input 2 8 电机供电电压; 9-12V(高达 36V)Vcc 2 9 电机 2 的使能引脚;高电平有效 Enable 3,4 10 Input 1 for Motor 1 Input 3 11 Output 1 for Motor 1 Output 3 12 Ground (0V) Ground 13 Ground (0V) Ground 14 Output 2 for Motor 1 Output 4 15 Input2 for Motor 1 Input 4 16电源电压; 5V (高达 36V) Vcc 1
第 3 步:关于应用
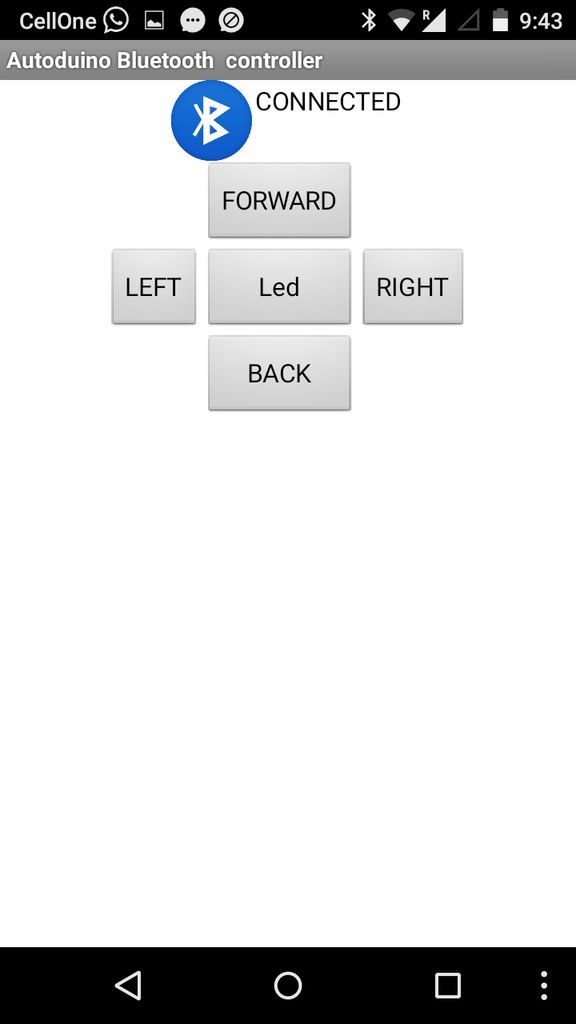


有很多应用程序可以控制我用一个。逻辑很简单,所有按钮在通过蓝牙按下时发送一个字符,然后 arduino 处理它。
字符函数
X 空状态 F 向前运动 B 向后运动 L 左转 R 右转
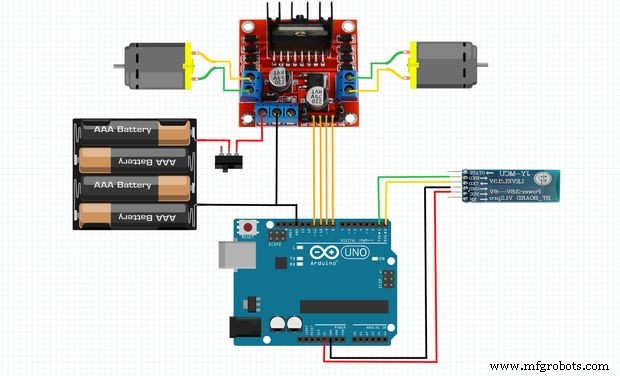
第 4 步:连接所有部分
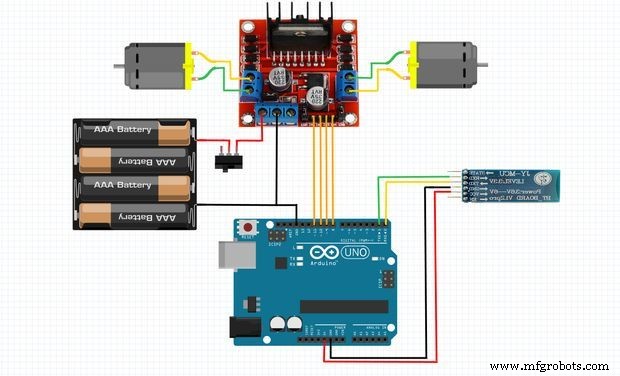

连接很简单
连接如下
蓝牙模块
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
电机驱动器
电机驱动器Arduino pin 2 8 pin 7 7 pin 10 6 pin 4 9 pin 3 and 6 Motor 1 pin 11 and pin 14 Motor 2 pin 1 5v pin 9 5v
第 5 步:编码


void setup() {Serial.begin(9600);pinMode(8, OUTPUT);pinMode(7, OUTPUT);pinMode(9, OUTPUT);pinMode(6, OUTPUT); pinMode(5, 输出); pinMode(4,输出);数字写入(4,低); digitalWrite(5,LOW);}// 循环函数不断重复forevervoid loop() {var=Serial.read();if(var=='F'){digitalWrite(6,LOW);digitalWrite( 7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH);} if(var=='H'){ digitalWrite(frled1,HIGH);}if(var=='B'){analogWrite(加速,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH);}if(var=='X'){digitalWrite(9,LOW);digitalWrite(8,LOW);digitalWrite(7,LOW);digitalWrite(6,LOW);数字写入(frled1,低); digitalWrite(bcled1,LOW);}if(var=='L'){digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);}if(var =='R'){digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);;}} 我希望你喜欢我所做的项目我很快会发布一些更酷的项目所以请关注我以获取所有更新也喜欢我的页面 https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
代码
- 代码片段 #1
代码片段 #1纯文本
void setup() { Serial.begin(9600); pinMode(8,输出); pinMode(7,输出); pinMode(9,输出); pinMode(6, 输出); pinMode(5, 输出); pinMode(4,输出);数字写入(4,低); digitalWrite(5,LOW);}//循环函数一遍遍地运行forevervoid loop() { var=Serial.read(); if(var=='F') { digitalWrite(6,LOW);digitalWrite(7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH); } if(var=='H') { digitalWrite(frled1,HIGH); } if(var=='B') {analogWrite(speeden,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);数字写入(bcled1,高); } if(var=='X') {digitalWrite(9,LOW);数字写入(8,低);数字写入(7,低);数字写入(6,低);数字写入(frled1,低);数字写入(bcled1,低); } if(var=='L') {digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); } if(var=='R') {digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);; }} 示意图
制造工艺