

构建一个由 PS2 控制器控制的战斗机器人
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
必要的工具和机器
| ||||
|
应用和在线服务
 |
|
关于这个项目
我们使用 Arduino UNO 和其他经济实惠的部件创建了战斗机器人。这些战斗机器人是在 Trivium Personalized Learning Public Charter School 的一个机器人俱乐部为 5 至 8 年级学生制造的。这是孩子们了解 Arduino 和机器人技术的有趣方式。
查看“SCHEMATICS”以查看所有连接方式的可视化图表。有电机板、传感器屏蔽、PS2 控制器以及连接到面包板的附加电机的图表,用于鳍状肢/微调器。鳍状肢/微调器被编程为在 PS2 控制器上按下 X 按钮时激活。
我们尝试使用负担得起的用品,并在如何设计战斗机器人方面为孩子们提供了创造性的自由。我们使用了不需要焊接的部件,使初学者更容易组装。
科络普
科络普用于建造尸体。它价格实惠,比纸板更坚固,而且相当容易切割和弯曲。
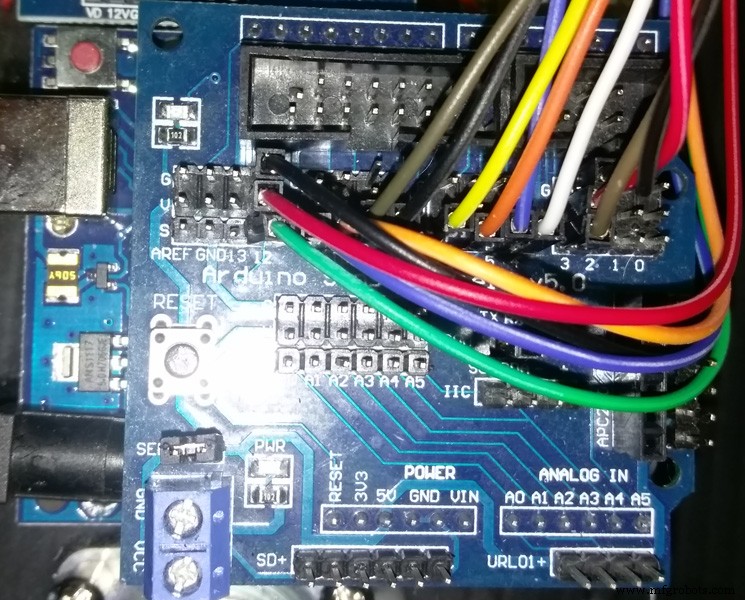
Arduino UNO 和传感器扩展板
我们使用了 UNO R3 传感器屏蔽罩,因此孩子们可以更轻松地连接部件。您将这个盾牌卡在 Arduino 的顶部,它就可以使用了。
电机驱动板
我们使用这个电机驱动器罩是为了让孩子们更容易连接他们的电机。
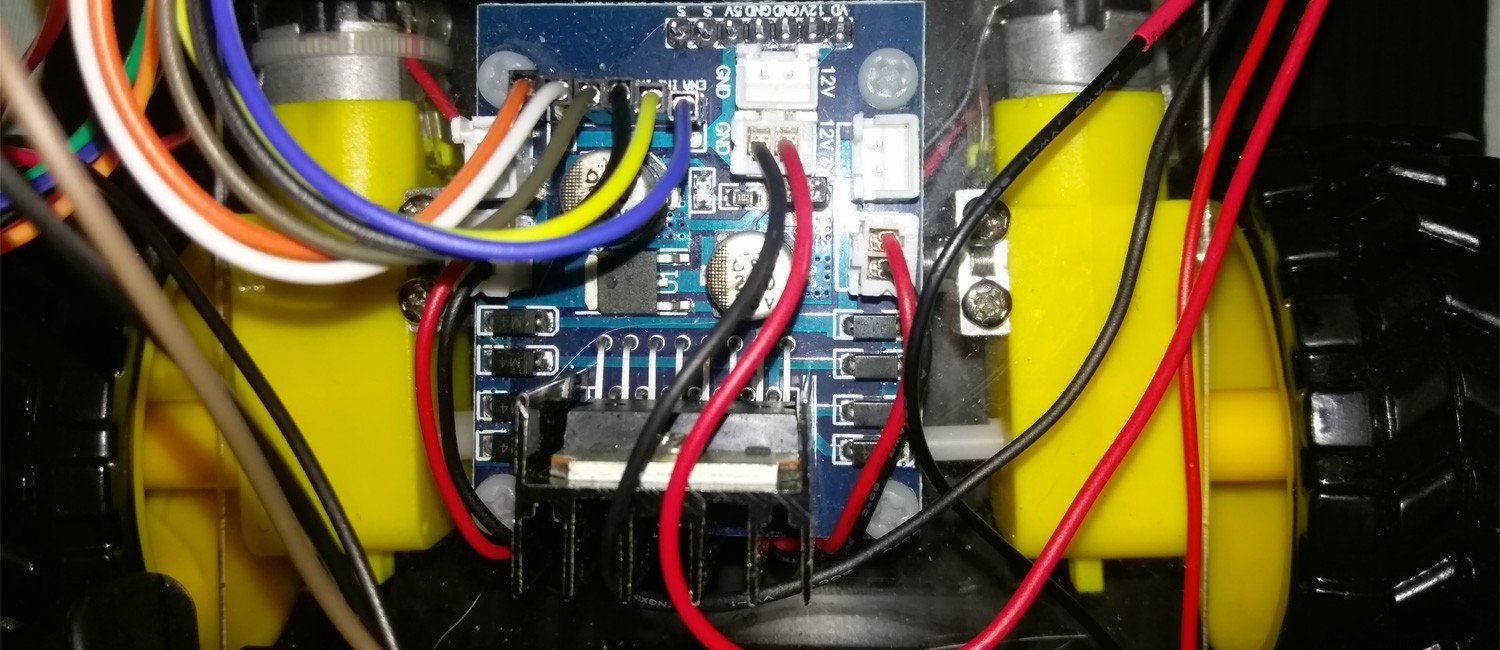
为了节省成本,我们制作了带有 2 个后置电机和一个前转轮的 2WD 机器人。然而,电机驱动器护罩支持 4WD,因此您可以轻松地为前部再组装 2 个电机。
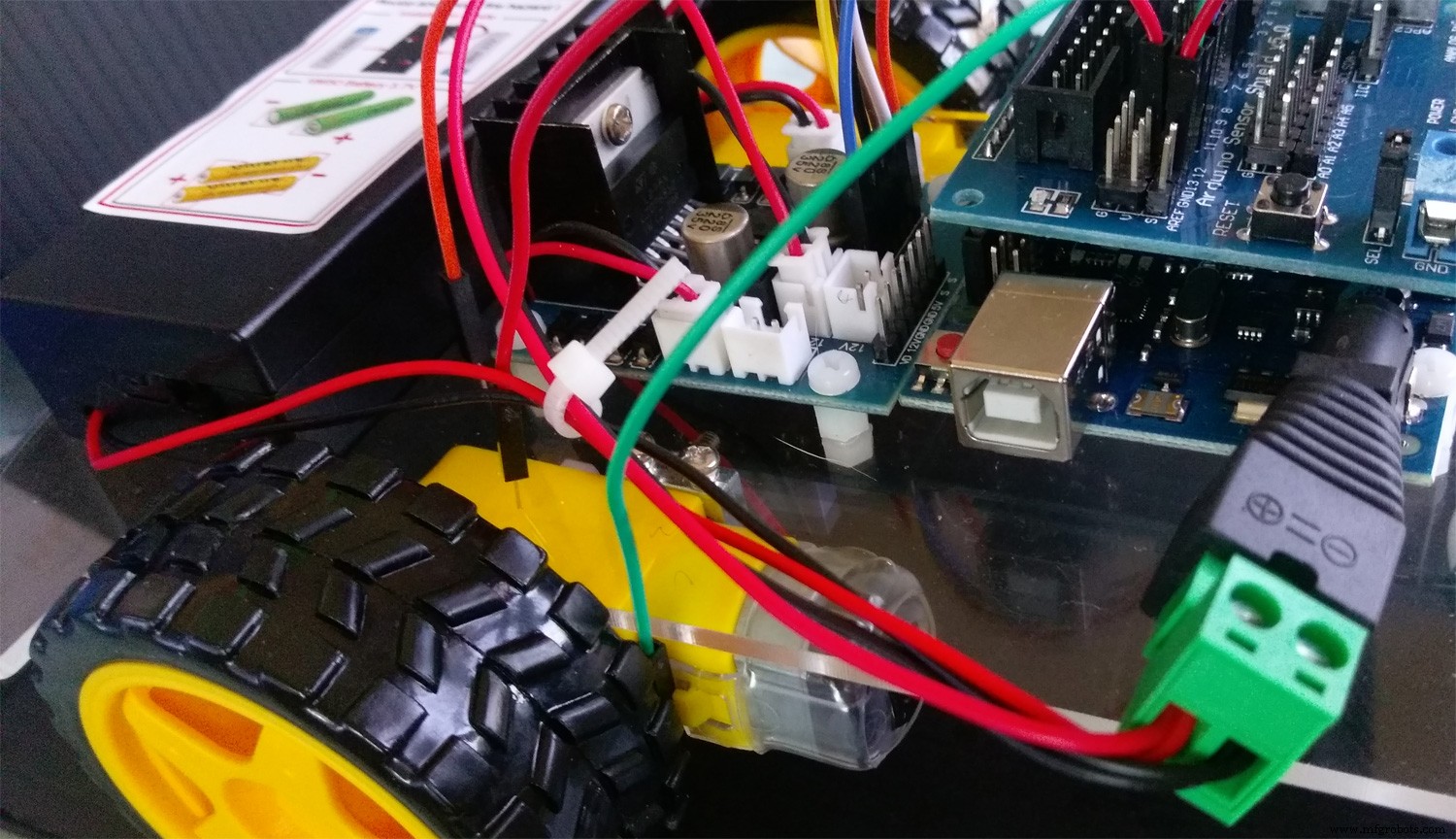
18650电池盒
我们选择这些电池盒是因为它们有 6" 引线,可以轻松连接到 Arduino。
PS2 控制器
我们还将机器人连接到通过蓝牙连接的 PS2 控制器。
有一些教程会教您如何修改现有的 PS2 控制器以与您的机器人一起使用,但我们使用了从 eBay 获得的已经修改过的控制器。在组件和耗材下有指向该控制器的链接。
其他用品
我们还使用跳线(公/公和母/公)、胶带、螺钉、螺母、螺栓、木销、双面胶带和魔术贴来组装零件。
此外,我们 3D 打印了一些用于鳍状肢、旋转器和电机连接器的定制部件。在“自定义零件和外壳”下有指向旋转器和电机连接器之一的 STL 文件的链接。
构建这些战斗机器人非常有趣!我们喜欢看到孩子们使用有限的供应品提出的一些概念。很高兴看到他们在战斗中测试他们的机器人并根据他们看到的弱点做出改变时取得的进步。

战斗视频
- 在此处查看接线和图表
- 在此处下载代码
- 在此处下载 3D 打印部件
- 获取此处使用的部件列表
代码
带 PS2 控制器的战斗机器人
允许您使用 PS2 控制器控制战斗机器人的代码定制零件和外壳
这是一个学生创建的 3D 打印旋转器,它连接到其中一个电机上。当按下 PS2 控制器 X 按钮时它会被激活。这是一个 3D 打印的连接器,我们用来连接到电机的末端,因此我们可以轻松地将销钉连接到它们。我们使用的 12 包 3D 打印连接器连接到电机的末端。如果您想为一个班级打印大量这些,请使用此选项,否则使用 Motor Connector - Single Piece .stl 仅打印 1 个。示意图
这是电机板的接线。显示电机如何连接到电机板以及电线如何从电机板连接到传感器屏蔽。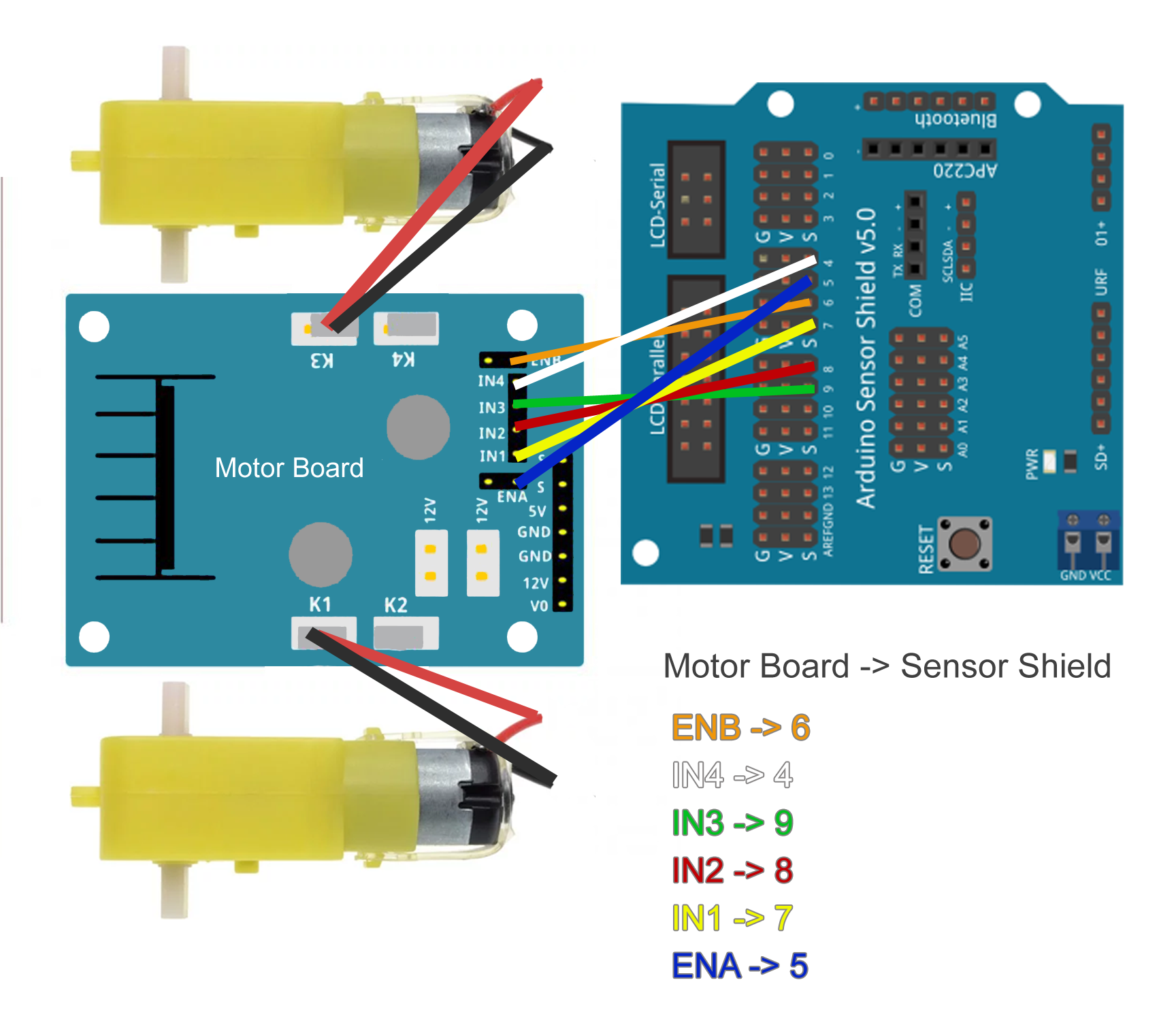 该图显示了如何将蓝牙接线连接到传感器屏蔽层。
该图显示了如何将蓝牙接线连接到传感器屏蔽层。 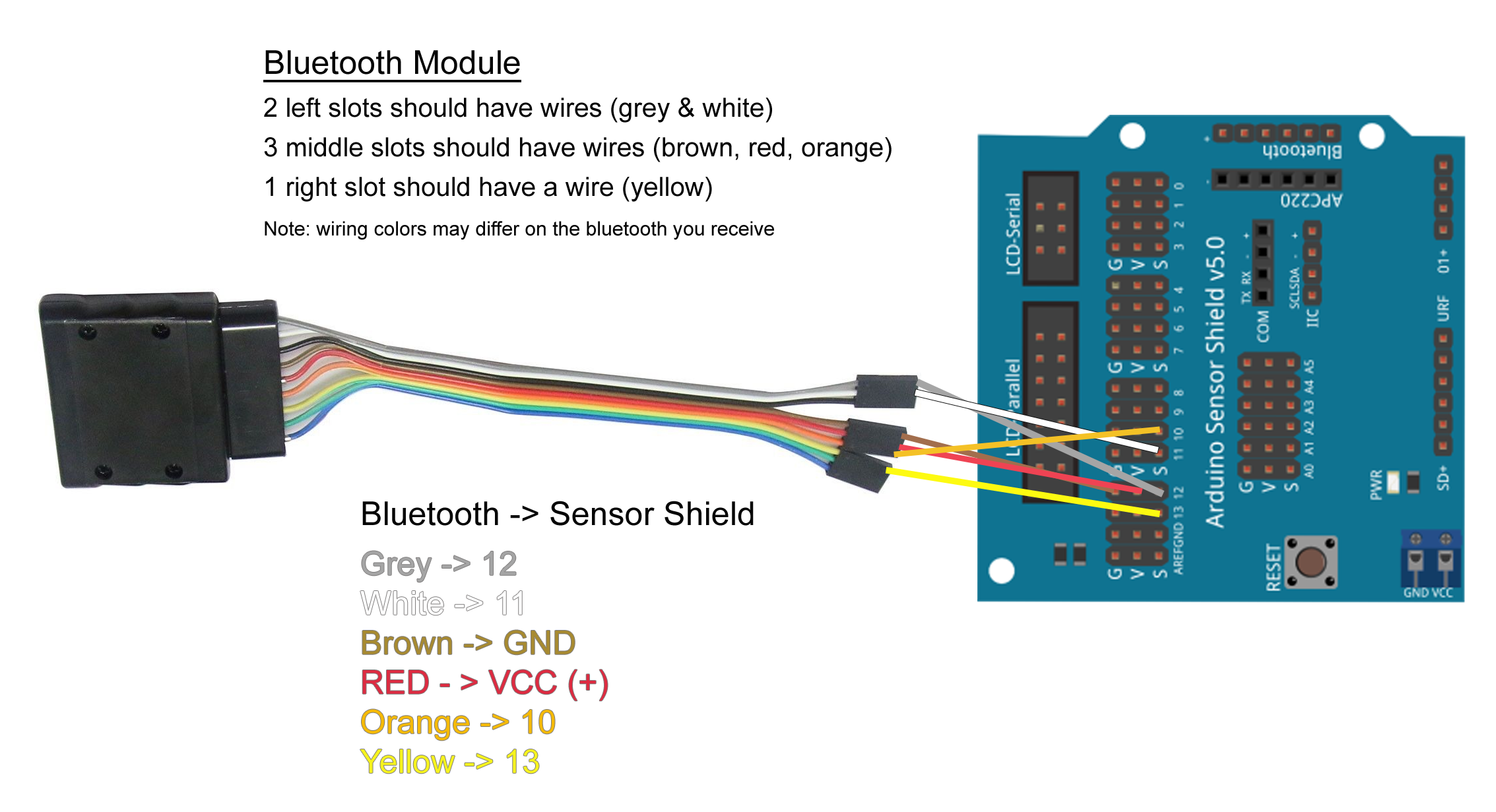 这是一个额外的马达,在按下 PS2 X 按钮时被添加来激活鳍状肢。
这是一个额外的马达,在按下 PS2 X 按钮时被添加来激活鳍状肢。 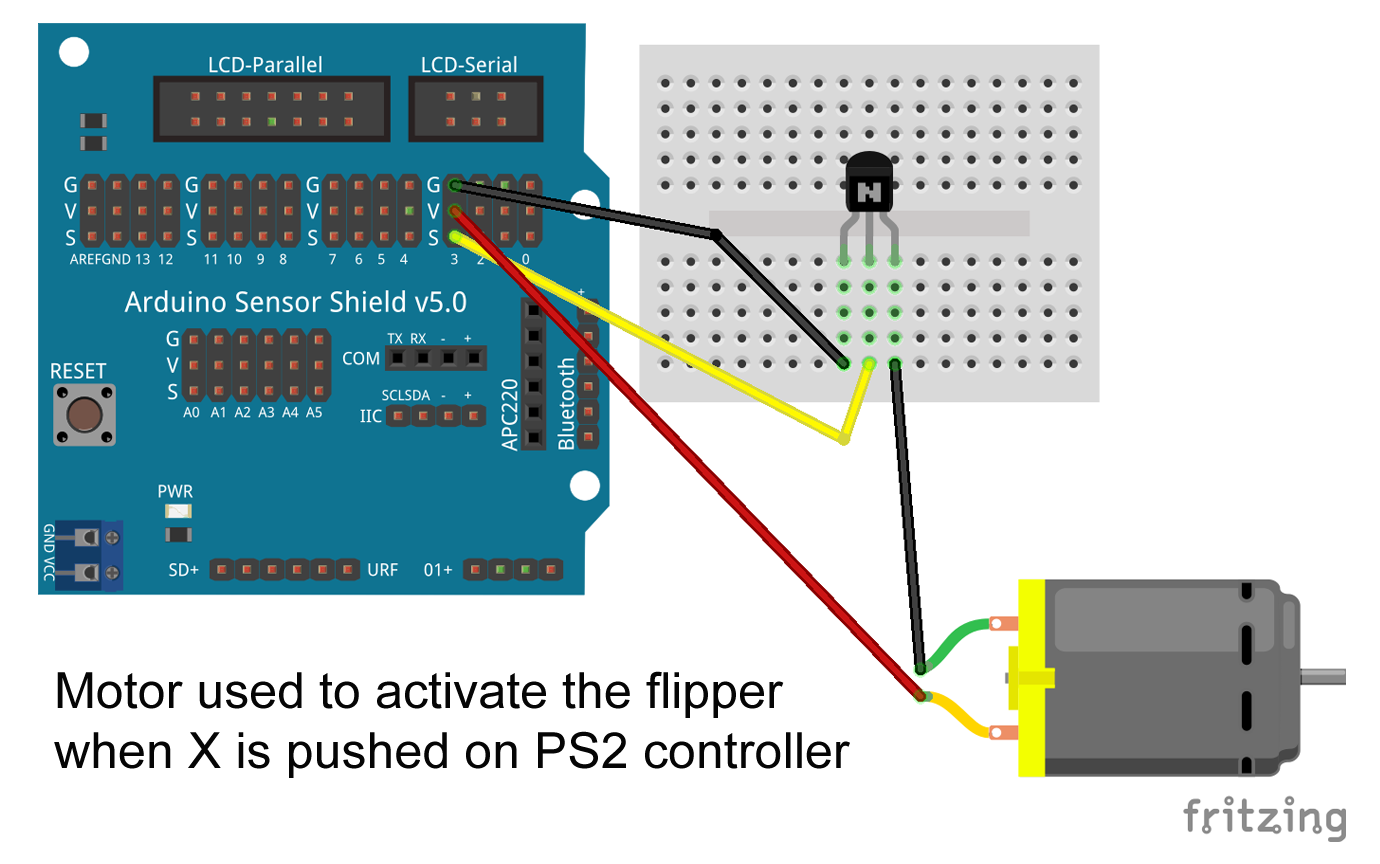
制造工艺
- 带有 Sensorflare 和 RaspberryPi 的 433MHz 智能家居控制器
- 带有湿度传感器的 Win10 IOT 灌溉控制器
- 使用 PSoC 6 Pioneer Board 和 Pioneer IoT Add-on Shield
- 使用 Arduino 和 Raspberry Pi 构建您的 Internet 控制的视频流机器人
- Squid Games Doll 使用 Arduino UNO
- Web 操作的 DMX 控制器
- 带有伊斯兰祈祷时间的 Arduino 时钟
- Unopad - 带有 Ableton 的 Arduino MIDI 控制器
- 使用 Raspberry Motor Shield 的 Android 控制玩具
- Nunchuk 控制机械臂(使用 Arduino)
- 25 kHz 4 Pin PWM 风扇控制与 Arduino Uno
- 使用容器进行多阶段构建