

滑动门自动化
组件和用品
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
关于这个项目
项目概况
在这个项目中,我利用 Arduino 的强大功能来创建一个电路来为滑动门供电。该项目的主要目的是利用一个带有功能正常的交流电机的死滑动门,并使用 Arduino、几个继电器、一个 433MHz 接收器、一个 433MHz 发射器和一些狡猾的电气技能使系统自动化。该系统创建了一种在需要时为门的电机供电并决定是打开还是关闭门的方法。
Arduino 不断听取来自发射器的设定响应,在这种情况下,它是用于打开或关闭门的遥控器。发射器在两个通道上运行,每个通道都有其唯一的 ID。一旦这个 ID 被 433MHz 接收器接收到,它就会向 Arduino 发送一个信号,Arduino 控制继电器为电机供电。
方法论
第 1 步:为电机供电
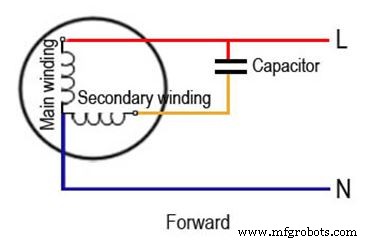
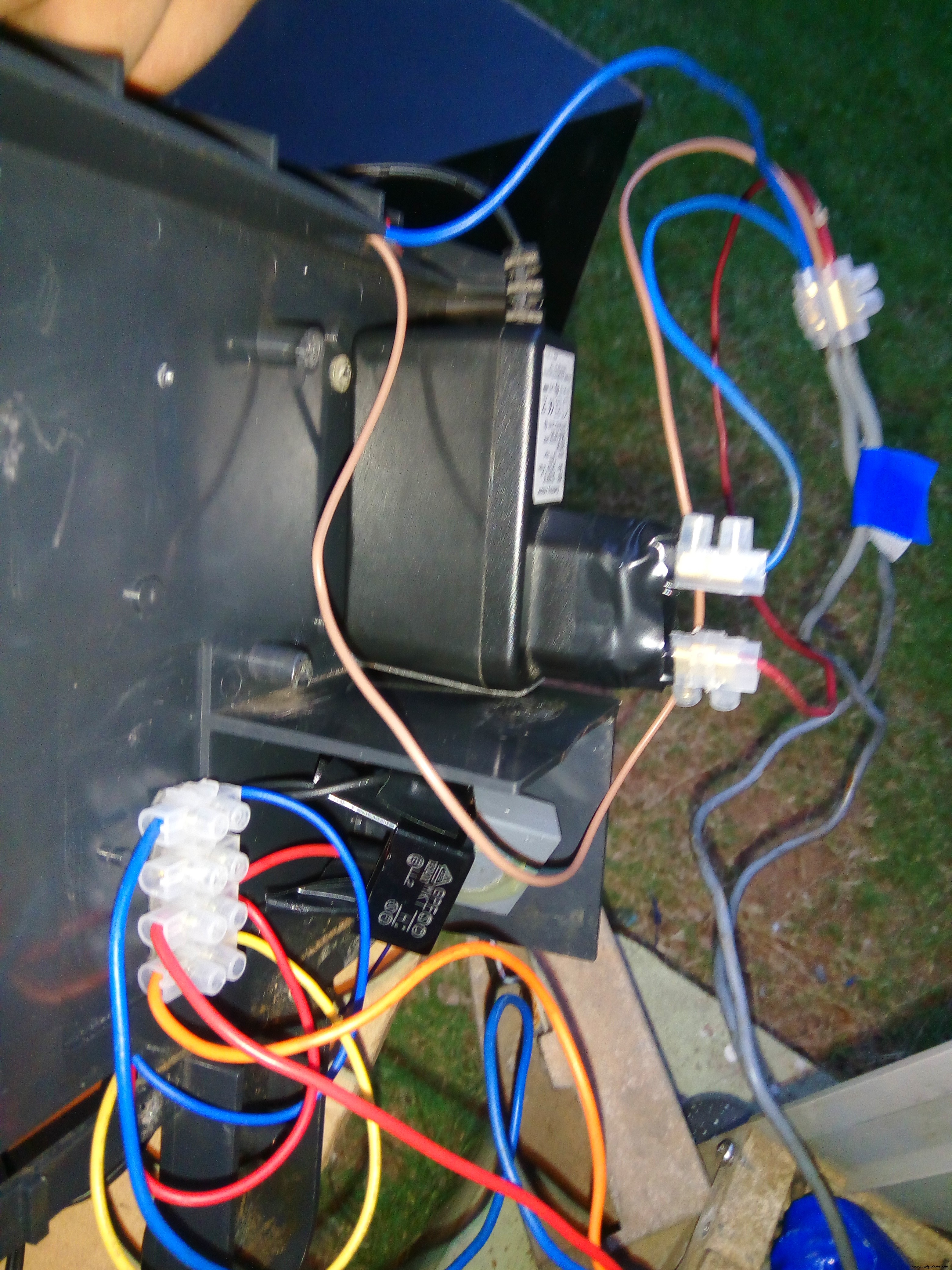
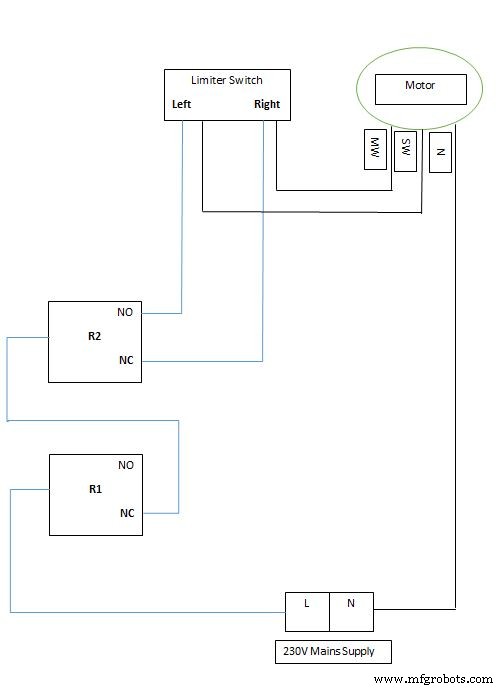
为电机供电的配置如下所示。为了使电机向前(关闭)方向移动门,主绕组应连接到主电源。
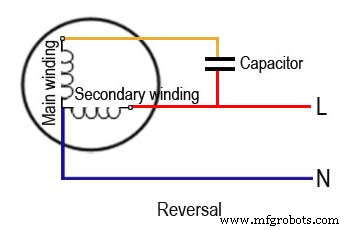
为了使电机向相反(开路)方向运动,次级绕组应连接到主电源。
需要确定哪根线对应哪一个绕组。通常电线没有标记,这可以通过向电线提供交流电源通过反复试验来识别。
就我而言,我使用的是 220~240VAC 电机。我能够轻松识别中性线,因为它是蓝色的,这是用于指示中性端子的标准颜色。
接下来,我将 Live 端子连接到红线,这使电机正向转动。这表明我为主绕组供电 的电机。
注意: 确保启动电容器连接正确且功能正常。这样可以保证电机有足够的启动转矩。
第 2 步:停止电机
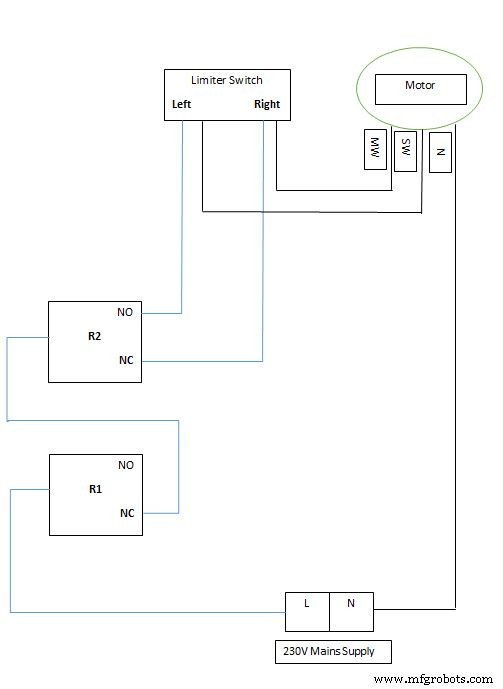
电源通过限位开关提供给电机。一旦门到达一端,限位器开关就会被触发,从而打开电路并停止主电源向电机供电。
第 3 步:使用继电器控制电机
继电器有两个触点;常开和常闭。
常闭路径用于为电机的主绕组供电。选择这样做是为了确保当系统重置或系统出现问题时,电机将确保门始终保持关闭状态。
常开路径用于为电机的次级绕组供电。当继电器内部的线圈通电时,常开路径闭合。这可以通过从 Arduino 发送 5V 信号来完成,因为所使用的继电器在 5V 下运行。
通过使用两条路径为电机供电,确保不会同时向电机的主绕组和副绕组供电。
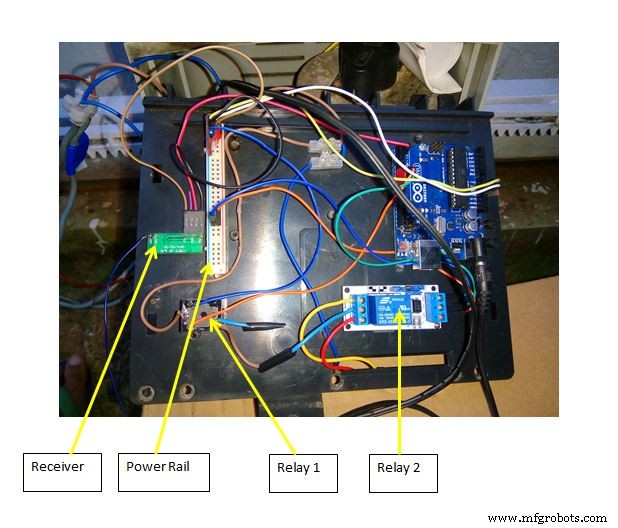
这个继电器(R2 ) 通过 pin 8 操作 Arduino的。
第二个继电器(R1 ) 用于断开电路,以便在门移动时 Arduino 接收到来自接收器的命令时电机停止。
Arduino 会不断检查接收器是否收到任何命令。一旦发出命令,Arduino 就会重新为电机供电,以使其关闭或打开门。
第二个继电器的主要目的是让系统有足够的时间重新路由系统为电机供电,而不会立即改变电机的转动方向。重新路由完成后,继电器关闭,并向电机供电以向相反方向转动。
该继电器通过 pin 9 操作 Arduino的。
第二个中继的目的
如果系统在关闭门的中途并从接收器接收到打开门的命令,则继电器被激活以将电源重新路由到次级绕组。由于这几乎是瞬间发生的,继电器处于恒定压力下,该压力来自由于主绕组突然断电而由电机产生的反向电压。此外,如果持续施加压力,会永久损坏继电器的触点。
在附加继电器的帮助下,电源与电机断开连接,让系统有 10 秒的时间将电源重新路由到必要的绕组。这减少了继电器触点上的应力并延长了它们的使用寿命。
继电保护方式:
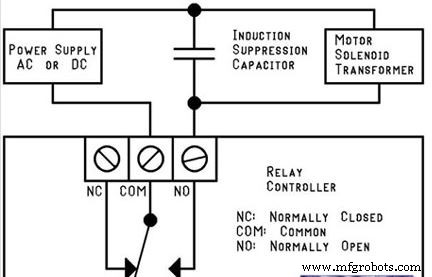
抑制电容器
当直流电机突然停止时,电机线圈会产生负电流回路,这是由于线圈的电感特性造成的。然而,这可以通过安装反馈二极管为负电流流动提供路径来中和。
当交流电机通过开关突然停止时,它会在开关触点上产生高压。
当电机被告知以相反方向运行时,抑制电容器用于防止继电器触点上积聚高电压。这可以保护继电器触点。

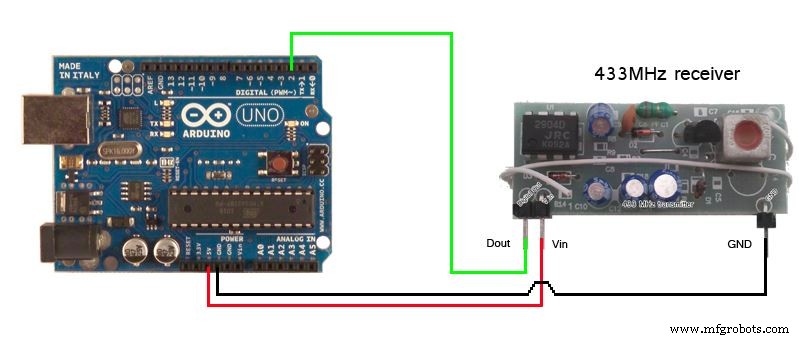
第 4 步:配置接收器
接收器以 433 MHz 运行,Arduino 的程序不断循环以检查接收器的信号端口。一旦接收到正确的信号,Arduino 就会激活继电器 1(R1),以便继电器 2(R2) 为电机供电。
当数据从发射器发送时,它以整数形式被接收器接收。就我而言,使用 Arduino 的串行监视器我能够看到接收器能够接收到的值。
使用较高射频进行通信的主要原因是工作范围大,即使有一些障碍物阻挡信号,接收器也能接收到信号。这只能通过高频无线电波来实现。
在我的项目中,我能够获得大约 30 英尺的工作半径,以便系统激活。
注意: 通过将很长的电线焊接到天线,系统的功能半径可以扩大几英尺 接收模块中的端口。

演示视频
最终项目快照
示意图
制造工艺