

分离干湿垃圾的智能分离器
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
 |
| |||
 |
|
应用和在线服务
 |
|
关于这个项目
说明: 这种分离器可以成功地分离干垃圾和湿垃圾。
注意: 它不能隔离塑料或金属。为此,您必须使用额外的传感器和模块
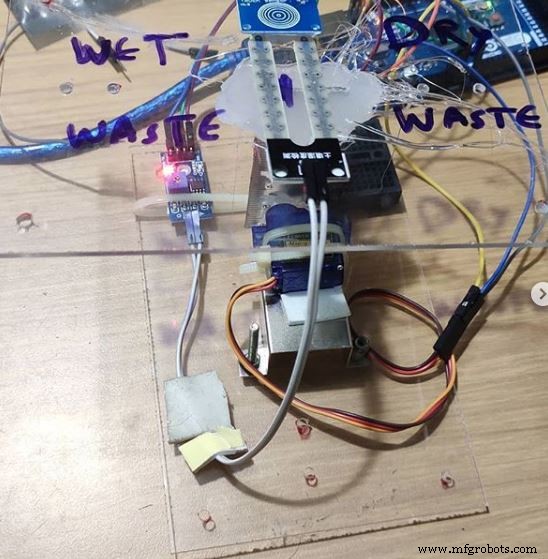
施工:
1. 我使用了 2 张亚克力板作为隔离器的主体
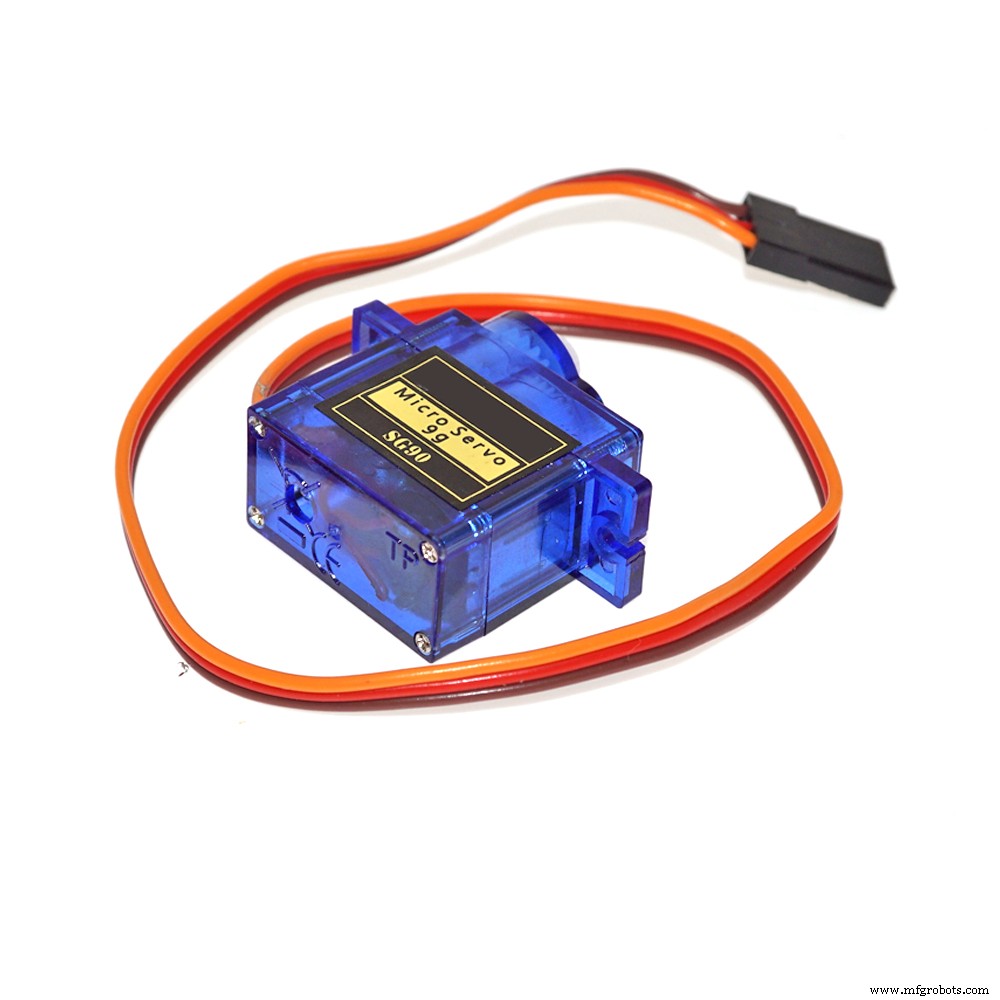
2 .伺服电机用作执行器,根据废物类型(干或湿)旋转
3. 我使用成本非常低的固定秤/标尺作为伺服电机的轴。这将连接上基座和伺服电机。我是用胶枪粘的。
- 注意:您也可以使用 feviquick 作为胶水,但它有风险,因此请谨慎使用。
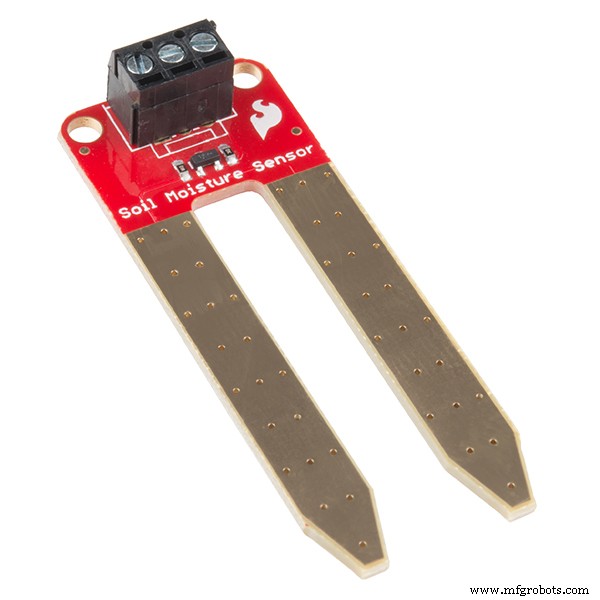
4. 水分传感器固定在分离器的上部,以便在放置废物时直接落在传感器上。除此之外还有一个触摸传感器来检测干垃圾。至此,本项目建设完成。

湿度传感器可以单独分类垃圾类型,为什么要触摸传感器?
- 是的 的确,水分可以对湿垃圾进行分类。但它不能分类干垃圾。为什么?想象一下,当传感器上没有废物时,您希望处于中立状态。无论你怎么努力,你都无法达到这种中立状态。默认情况下,湿度传感器将始终处于干燥状态,这将导致分离器始终向任一侧倾斜。为了解决这个问题,我们使用了触摸传感器。
分步实施:
- 步骤 1 :如上图所示,收集 2 张亚克力板。您可以在当地商店的任何地方获得这些床单,也可以通过亚马逊在线订购。
- 第 2 步 :如图所示在亚克力板上打孔,以便将面糊架固定到上面。
- 步骤 3 :然后在电池座的上侧,将伺服电机指向正前方,如图所示。可以用双面胶或胶枪固定伺服电机。
- 第 4 步 :然后拿一个塑料固定秤(你在学校里用来画线的)在它的底部打一个比电机轴直径略小的孔。(你可以用一个热烙铁或任何其他细钢棒。)
- 步骤 5 :使用胶枪将另一张亚克力板粘在秤的顶部,如图所示。确保它固定得很紧并且不会移动。
- 步骤 6 :将湿度传感器和触摸传感器放在亚克力板的顶部。
>> 正确执行这 6 个步骤后,您就可以开始了 :)
硬件说明:
要实现此硬件设置,您需要深入了解以下概念:
- 阿杜诺 : Arduino 是将在该项目中使用的微控制器。您可以在此链接中了解有关此内容的所有信息。另外不要忘记查看Arduino的官方文档。
- C++ 编程 : 对于 Arduino 编程,您将学习 C++ 编程到中级水平。您还必须学习 Arduino 的基本功能。
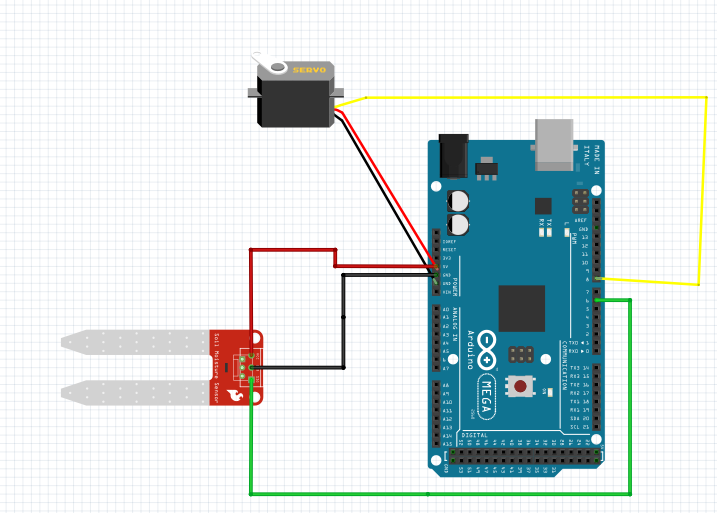
- 湿度传感器 : 您将需要了解 Arduino 与带有电路图的湿度传感器的接口。
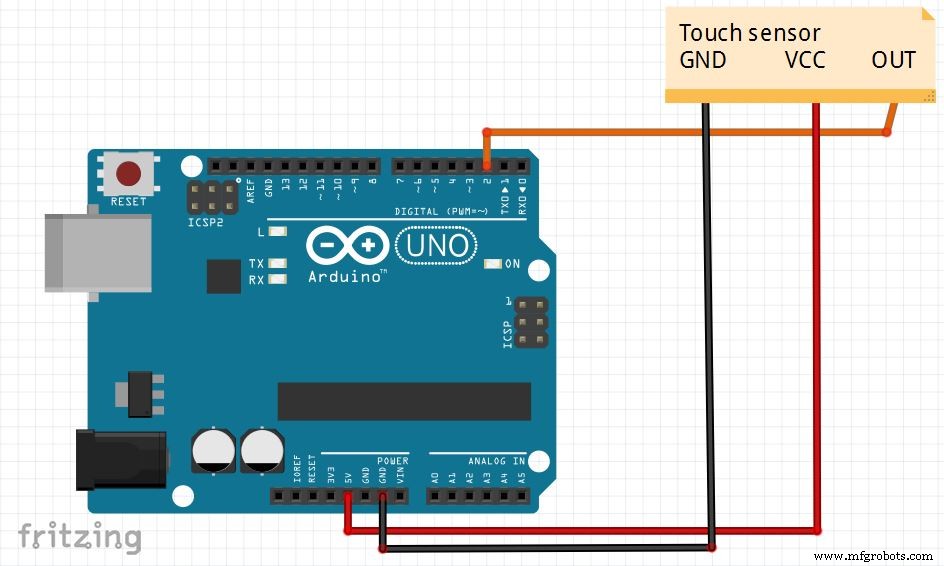
- 触摸传感器: 您将需要了解 Arduino 与带有电路图的触摸传感器的接口。
- 伺服电机: 您将必须了解伺服电机以及它如何与 Arduino 一起运行。
智能分离器的逐步工作:
- 步骤 1: 废物被放置并落在湿度传感器上。
- 第 2 步 :根据阈值设置,湿度传感器将其分类为干的或湿的。
- 第 3 步: 完成第 2 步后,伺服电机会根据垃圾类型向任一方向运行,垃圾会进入适当的隔间。
- 第 4 步: 整个过程是自主和连续的。
视频: 不要忘记查看这个项目的出色工作(链接如下:)
代码
- 智能隔离器
智能分离器C/C++
#includeclass Smart_Segregator/* _____________________________________________________________ | |说明 | ----------- | - 这是一个干湿分离的智能分离器|湿垃圾。 (它不能隔离金属或塑料)| |................................................................ ………… | |属性 | ---------- | pin_1:int | - 伺服电机引脚号。 | | pin_2:int | - 湿度传感器引脚编号。 | | pin_3:int | - 触摸传感器引脚编号。 | |................................................................ ..... | |方法 | ------- | dry_waste() | - 分离器的盖子向右侧滑动。 | |湿废物() | - 分离器的盖子滑向左侧 | |中立状态() | - 其中分离器的盖子在中间。 | |执行() | - 智能分离器开始运行。 | |_____________________________________________________________________ */{ 公共:int 伺服销; int水分传感器_pin; int touch_sensor_pin; int检测水分; int检测触摸;伺服伺服; Smart_Segregator(int pin_1,int pin_2,int pin_3){servo_pin =pin_1;水分传感器_pin =pin_2; touch_sensor_pin =pin_3;检测水分=0;检测触摸=假; } void init() { Serial.begin(9600);伺服。附加(伺服销);伺服.写(90); pinMode(moisture_sensor_pin,输入); pinMode(touch_sensor_pin,输入); Serial.println("您的智能分离器已准备好进行分离!"); } void dry_waste() { 伺服.write(0); } void wet_waste() { 伺服.write(180); } void中性状态(){伺服.写(90); } void execute() { detect_moisture =digitalRead(moisture_sensor_pin); detect_touch =digitalRead(touch_sensor_pin); if (detect_moisture> 85 &&detect_touch ==true) {wet_waste(); } else if (detect_moisture <=85 &&detect_touch ==true) { dry_waste(); } else {中立状态(); } }}segregator =Smart_Segregator(8,6,2);void setup() { segregator.init();}void loop() { segregator.execute();}
示意图
制造工艺