

借助人工智能,机器人外骨骼获得自我控制
机器人研究人员正在使用复杂的人工智能 (A.I.) 技术开发能够自行行走的外骨骼腿。有朝一日,自我控制的腿可能会支持老年人和身体残疾的人的运动。
该系统由滑铁卢大学的研究人员构建和测试,结合了计算机视觉和深度学习人工智能。模仿人类的步态。系统从围绕环境的一组样本中“学习”,根据其感知的环境调整其动作。
“我们正在为机器人外骨骼提供视觉,以便它们能够控制自己,”Brokoslaw Laschowski 说 ,系统设计工程博士生,领导滑铁卢大学的一项名为 ExoNet 的研究项目 .
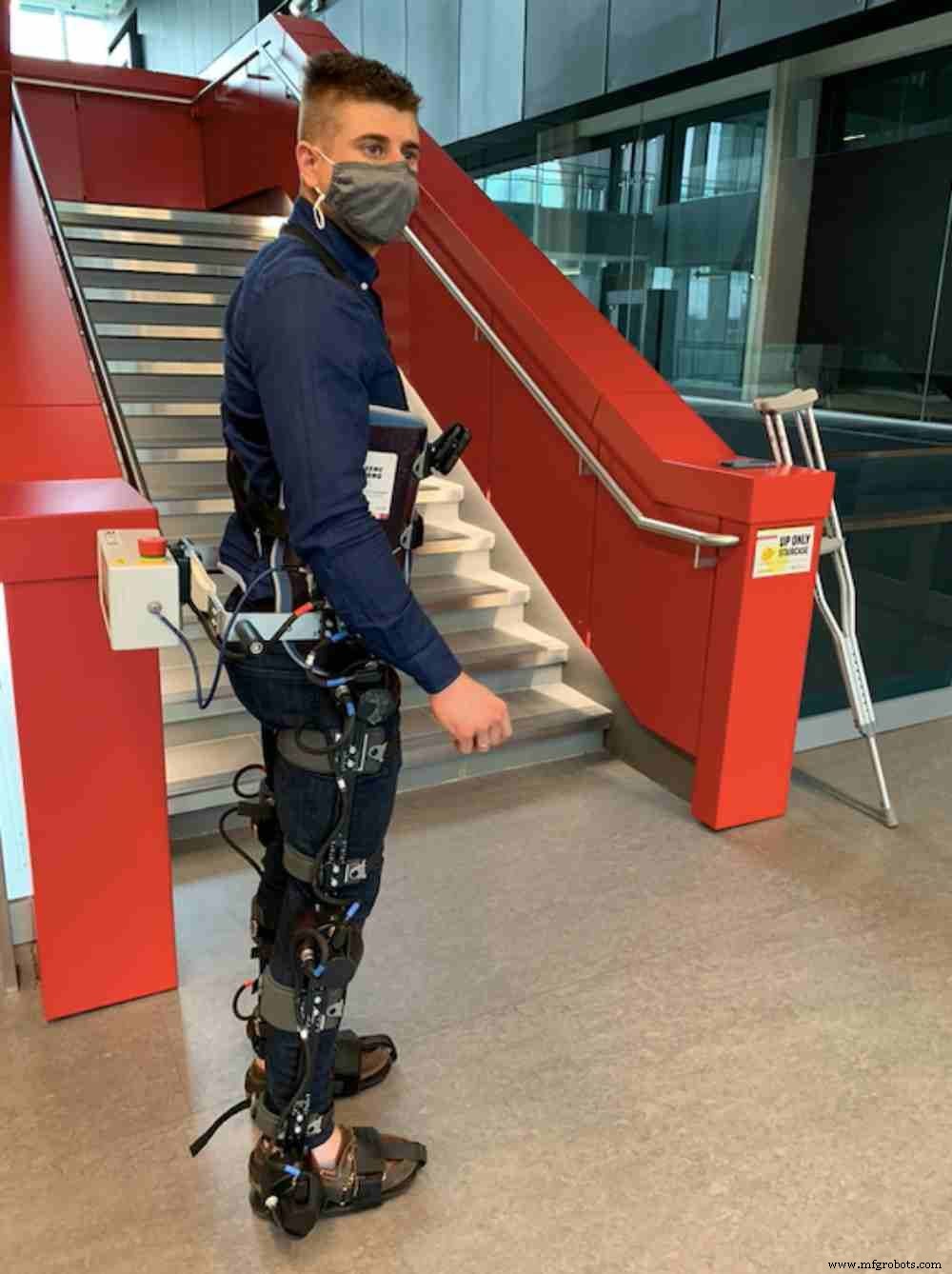
由人工智能支持的 ExoNet 系统从团队收集的训练数据中提取。 Laschowski 和他的研究人员将可穿戴相机绑在胸前(如上图所示),拍摄了室内和室外环境的视频。
人工智能然后计算机软件处理视频输入,以准确识别周围环境中的楼梯、门和其他特征。
该成就在《机器人与人工智能前沿》杂志中进行了详细介绍 . (探索一个研究数据集 与这个自主外骨骼项目有关。)
相关项目系列论文中的最新一篇,Simulation of Stand-to-Sit Biomechanics for Robotic Exoskeletons and Prostheses with Energy Regeneration ,发表在 IEEE Transactions on Medical Robotics and Bionics 杂志上。
以前曾设计过电动外骨骼腿,但佩戴者几乎总是需要操纵杆或智能手机应用程序来控制他们的动作。
技术简介中的更多机器人
特拉维夫大学正在开发的机器人“听到”电信号,这要归功于一种天然传感器:一只死蝗虫的耳朵。
一个新的机器人不需要任何电子设备来移动——只需一个恒定的加压空气源。
Laschowski 说:“这可能很不方便,而且对认知要求很高。” “每次你想要进行新的运动活动时,你都必须停下来,拿出智能手机并选择所需的模式。”
得益于人工智能,滑铁卢大学的方法提供了更加自动化的控制。和计算机视觉能力。
ExoNet 研究项目的下一阶段将涉及向电机发送指令,以便机器人外骨骼可以爬楼梯、避开障碍物或根据对用户当前运动和即将到来的地形的分析采取其他适当的行动。
此外,研究人员还致力于通过利用人体运动对电池进行自充电来提高机器人外骨骼电机的能源效率。
“我们的控制方法不一定需要人类的思考,”由工程教授 John McPhee 监督的 Laschowski 说 ,加拿大生物机电系统动力学研究主席,在他的运动研究小组中 实验室。 “与自动驾驶汽车类似,我们正在设计自动行走的自动外骨骼。”
在与技术简介的问答中 下面,Brokoslaw Laschowski 详细解释了 ExoNet 技术,以及为什么具有类似于自动驾驶汽车功能的外骨骼还必须包括类似车辆的安全措施。
技术简介 : 你们如何确保安全?如果外骨骼错误地做一些危险的事情,用户可以控制吗?类比是 ADAS 与完全自动驾驶汽车。用户将如何控制速度和停止和前进?这些控件如何与用户交互?
布罗科斯瓦夫·拉肖夫斯基 :安全是最重要的。这些机器人设备旨在帮助老年人和身体残疾(例如中风、脊髓损伤、脑瘫、骨关节炎等)。我们不能让外骨骼做出错误的决定并可能导致跌倒或受伤。因此,我们完全专注于通过开发环境识别系统来提高分类准确性和控制,以使外骨骼能够自主感知并实时响应步行环境。在临床测试之前,我们正在使用具有“健康”控件的计算机和可穿戴原型来优化系统性能。但是,外骨骼用户将始终能够接管手动控制(例如,停止和转向)。
技术简介 :你能带我看看你设想的这种外骨骼的应用吗?这在哪里最有价值?
布罗科斯瓦夫·拉肖夫斯基 :这些机器人设备旨在帮助老年人和身体残疾的人进行运动活动。我们的环境自适应自动控制系统的一个示例应用是在不同的运动活动之间切换。例如,在市售的外骨骼中,当从平地步行过渡到爬楼梯时,用户接近楼梯、停下来,并使用移动界面、按钮或其他手动控制手动将预期活动传达给外骨骼(取决于设备)。
相比之下,使用自主控制系统,当用户接近倾斜楼梯时,惯性测量单元 (IMU) 等车载传感器会持续感知用户当前的动作并对其进行分类,而可穿戴摄像头系统则会对即将到来的地形进行感知和分类。这些不同的传感器技术和模式识别算法的融合被用来预测用户的运动意图和控制外骨骼。
技术简介 :如何“训练”外骨骼在没有人类思想的情况下操作?
布罗科斯瓦夫·拉肖夫斯基 :我们使用计算机视觉和深度学习进行环境分类。使用数百万张真实世界的图像,我们的卷积神经网络经过自动且有效的训练,可以预测图像中显示的不同步行环境。这些关于步行环境的信息随后被用于控制机器人外骨骼,以进行最佳路径规划、避障和不同运动活动之间的切换(例如,从平地步行到爬楼梯)。
技术简介 :这个外骨骼的下一步是什么?你现在在做什么?
布罗科斯瓦夫·拉肖夫斯基 :从安全关键的角度来看,这些由人工智能驱动的外骨骼控制系统需要准确、实时地执行。因此,我们专注于提高环境分类精度,同时使用计算和内存存储要求最低的神经网络架构来促进板载实时推理。
你怎么看?分享您的问题和意见。
传感器