

用于人脸识别应用的 ReS2 电荷捕获突触设备
摘要
Synaptic 设备是满足对更智能、更高效系统日益增长的需求所必需的。在这项工作中,各向异性二硫化铼 (ReS2) 用作通道材料来构建突触装置并成功模拟长期增强/抑制行为。为了证明我们的设备可以用于大规模神经网络系统,从 Yale Face 数据库中选取 165 张图片进行评估,其中 120 张图片用于人工神经网络 (ANN) 训练,其余 45 张图片用于用于 ANN 测试。一个包含超过 10 5 的三层人工神经网络 权重被提议用于人脸识别任务。还选择了 120 个连续调制电导状态来替换我们训练有素的 ANN 中的权重。结果表明,仅用120个电导态就达到了100%的优异识别率,证明了我们的装置在人工神经网络领域的巨大潜力。
背景
自从现代计算机出现以来,运算单元与存储器分离的冯诺依曼结构得到了广泛的应用。这种结构使得运算器和存储器之间的数据传输成为瓶颈,极大地限制了计算机性能的提高[1, 2]。同时,运算单元和主存储器都是易失性设备,能耗高,断电后信息会立即消失[3]。相比之下,人脑是一个高效的信息存储和计算系统,具有高容错和低功耗(约 20 W),它基于一个高度互连、大规模并行、结构可变的复杂网络,由约 10 11 神经元和 10 15 突触 [4, 5]。这些神经元被认为是大脑的计算引擎,并行接收来自数千个突触的输入信号。突触可塑性是通过突触活动改变突触权重的生物学过程,被认为是学习和记忆的来源[6]。
具有小尺寸和优异电子特性的二维 (2D) 材料,如石墨烯、过渡金属二硫属化物 (TMDC) 和黑磷,引起了极大的关注,并已成功应用于突触装置 [7, 8]。具有对称晶格的 TMDC,如 MoS2 和 WSe2,已被广泛研究 [9, 10]。另一方面,在神经形态领域很少探索具有扭曲八面体 (1T) 晶体结构的二硫化铼 (ReS2)。大多数TMDs在单层中具有直接带隙,在多层中具有间接带隙,因此需要难以获得的单层材料以获得良好的器件性能。然而,十层内的 ReS2 都被认为具有直接带隙 [11],这意味着十层内的 ReS2 都可以表现良好。此外,不对称的晶格结构导致较弱的层间耦合能,有利于剥离工作,从而使突触装置更容易制造[12,13,14,15]。在本研究中,ReS2 薄膜用作通道材料。单层 ReS2 的晶体结构如图 1a 所示,其中方向 a 和 b 分别表示基面中的第二短轴和最短轴。基于之前的科学研究和我们剥离的 ReS2 薄膜的大量光学图像 [13],方向 b 表示具有最高电子迁移率的晶体取向。为了更好地说明我们的 ReS2 突触装置的电气特性,方向 b 被认为是沟道电流的方向,如图1b所示。
<图片>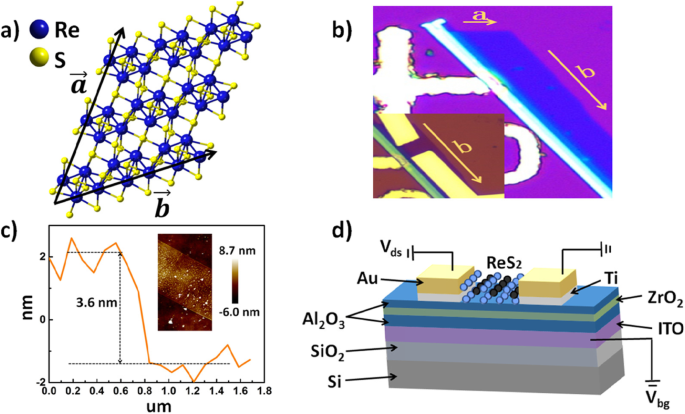
基于 ReS2 2D 材料的突触装置。 一 单层 ReS2 的晶体结构。 b 五层 ReS2 薄片的光学图像。插图:在 ReS2 薄片上图案化的源电极和漏电极;方向b 被视为沟道电流的方向。 c ReS2 薄片的 AFM 图像和高度轮廓。 d 二维材料 ReS2 突触装置示意图。 Al2O3、ZrO2和Al2O3堆叠的厚度(从底部)分别为12 nm、4 nm和4 nm
已经有许多具有不同结构的装置成功地模拟了突触动力学,例如短期可塑性 (STP)、长期增强 (LTP) 和长期抑制 (LTD) [16,17,18]。 MoS2/PTCDA 混合异质结突触已被证明具有高效的光电双调制 [10]。碳纳米管突触 [19] 和硅基二硫化钼突触 [20] 表现出动态逻辑。然而,上述研究仅关注突触水平。在一些研究中,实现了不同的电导状态以证明他们的设备可用于构建人工神经网络 (ANN),但他们没有将导电状态放入 ANN 进行计算 [21, 22]。在这项工作中,调制了120个连续的电导状态,并将相应的电导值用于训练好的人脸识别网络中进行计算;实现了100%的优秀识别率。
方法
我们的突触器件的示意性结构如图 1d 所示,其中可以看到 70-nm ITO(氧化铟锡)膜沉积在 SiO2/Si 衬底上作为背栅电极。衬底是顶部有 200 nm SiO2 的 Si 晶片。首先用丙酮、异丙醇和去离子水清洗,然后在 ITO 沉积前用 N2 气干燥。 ITO 层首先通过溅射沉积,然后通过快速热处理 (RTP) 在 N2 气氛中在 400 °C 下退火 10 分钟。使用透明 ITO 电极是为了使用电子束光刻准确制造源电极和漏电极。通过原子层沉积 (ALD) 在 ITO 上生长厚度为 12 nm、4 nm 和 4 nm 的 Al2O3/ZrO2/Al2O3 夹层结构,分别作为势垒层、电子捕获层和隧道层。接下来,机械剥离的 ReS2 薄片厚度约为 3.6 nm,作为通道沉积在图案化的 Ti/Au 电极下方。使用电子束光刻技术对厚度为 10 纳米和 70 纳米的 Ti/Au 电极进行图案化,然后将电子束蒸发分别作为源和漏。图 1c 显示了我们 3.6 纳米厚的 ReS2 薄膜(约五层)的原子力显微镜图像;通道长度设计为 1.5 μm(见图 1b 中的插图)。在这项工作中,ITO 背门充当突触前神经元,Ti/Au 电极充当突触后神经元。源漏电极之间施加小而恒定的电压,而ITO背栅电极施加脉冲以调节突触器件性能。
结果与讨论
图 2a 显示了我们的突触器件在 2V 背栅电压 (V bg =2 V) 在固定的漏源电压 (V ds) 以 100 mV 的步长从 100 变为 700 mV。开/关电流比超过 10 6 可以观察到。该曲线显示了漏源电流 (I ds),首先迅速增加,然后变得饱和;优异的饱和特性对应于 ITO 背栅电极的强沟道调节。与使用硅作为底栅电极和 SiO2 作为电介质的传统晶体管不同,工作电压通常超过 20 V [23],我们的突触器件的工作电压与 ReS2 通道之间只有 20 纳米的距离ITO背栅电极低于5 V,显着提高了突触器件的效率。图 2a 中的插图显示了低 V 下的超线性关系 ds 状态,这表明 ReS2 通道与源电极和漏电极之间具有良好的肖特基接触。如图2b所示,I ds–V 当 V 时可以观察到 bg 滞后曲线 bg 从 − 5 变为 5 V,然后以 0.1 V (V ds =0.1 V)。在测量中,在源电极和漏电极之间施加 0.1 V 的小恒定电压以“读取”突触后电流。为突触性能提供基础的记忆窗口约为 3.5 V;如此大的内存窗口使我们的 ReS2 设备非常有希望用于突触应用 [24]。由于 ZrO2 的价带顶部高于 Al2O3,导带底部低于 Al2O3(见图 2c 中的插图),用作夹在氧化铝之间的中间层的 ZrO2 可以捕获有效充电。正负背栅电压下的能带图分别如图2c和d所示。当施加正电压时,ReS2 通道中的电子将首先隧穿通过 Al2O3 隧穿层,然后被 ZrO2 俘获层捕获。相反,当 ITO 施加负电压时,聚集在 ZrO2 层中的电子将被发送到 ReS2 通道;能带向通道方向弯曲。
<图片>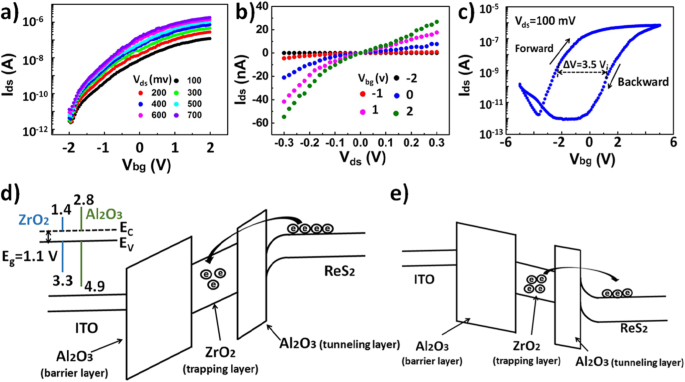
ReS2 突触装置的电学特性。 一 传递特性 (I ds–V bg) 固定 V 的 ReS2 突触装置 ds 以 100 mV 的步长从 100 mV 变为 700 mV。 b 输出特性 (I ds–V ds) 在固定 V 的 ReS2 突触装置 bg 以 1 V 的步长从 − 2 变为 2 V。c V 处的磁滞回线 ± 5 V 扫描范围的 bg。 V ds 保持在 100 mV。 d 具有正背栅电压的 ReS2 突触器件的能带图。插图:Al2O3 和 ZrO2 的能级。 e 负背栅电压下ReS2突触器件的能带图
在图 3a 中,在 ITO 背栅处施加负输入脉冲(幅度为 - 1 V,持续时间为 10 ms)后检测到典型的兴奋性突触后电流(EPSC)。此外,在图 3b 中观察到抑制性突触后响应正电压脉冲(幅度为 1 V,持续时间为 10 ms),这类似于生物突触 [25]。来自突触前神经元的脉冲信号通过突触传递到突触后神经元,并转化为突触后电流(PSC)[26]。 PSC 值由脉冲幅度和持续时间确定。当脉冲为负时,来自 ZrO2 缺陷的电子获得足够的能量,通过上层 Al2O3 介电层进入 ReS2 通道。电流的恒定值比之前的值略高(ΔPSC =0.04 nA)并且可以保持很长时间。这种现象对应于生物突触中的长时程增强 (LTP)。然而,当脉冲为正时,ReS2 通道中的电子在电场的吸引下穿过 Al2O3 层并被 ZrO2 的缺陷捕获。因此,电流的恒定值略低于原始值,并且可以长时间保持不变(ΔPSC =0.06 nA)。这个过程对应于生物突触中的长期抑制 (LTD)。 LTP 和 LTD 为突触装置中的学习和记忆提供了生理基础。当连续施加幅度为- 2 V、持续时间为10 ms的负脉冲时,脉冲之间的间隔为1秒,观察到两个步骤中的上升电流,如图3c所示。上升电流值分别为 1.6 nA 和 1.4 nA。因此,在周期性的栅极电压脉冲下可以获得连续且均匀上升的电流,并且刺激后的稳定电流可以持续很长时间,如图3d所示。这一发现为获得多种稳定的导电状态提供了依据。
<图片>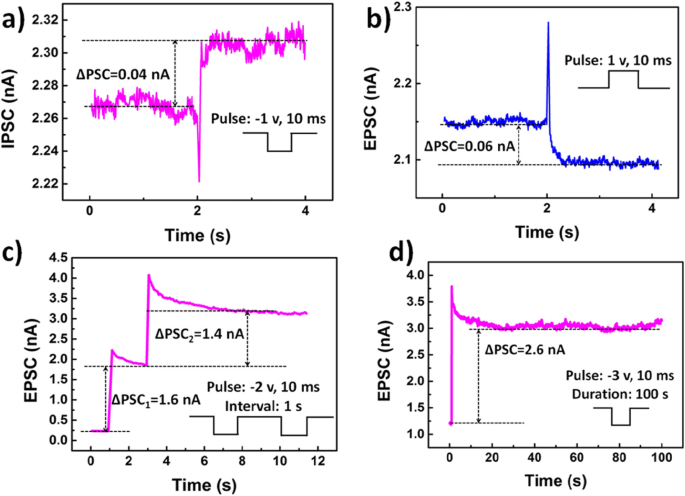
ReS2 突触装置的突触性能。 一 由输入脉冲触发的兴奋性突触后电流 (EPSC) (− 1 V, 10 ms)。 b 由突触前尖峰 (1 V, 10 ms) 触发的抑制性突触后电流 (IPSC)。 c 由两个连续输入脉冲(− 2 V,10 ms,脉冲之间的间隔为 1 s)触发的 EPSC 输出尖峰对。 d - 3 V和10 ms突触前尖峰后ReS2突触装置的保留特性
图 4a 显示了在施加 120 个负脉冲后的 120 个电流值,幅度为 - 2 V,持续时间为 10 ms,脉冲之间的间隔为 1 秒。显然,电流曲线表现出良好的线性,在每个状态下获得了120个有效的高稳定电导状态。不同的电导状态对应不同的ANN权重值[27]。
<图片>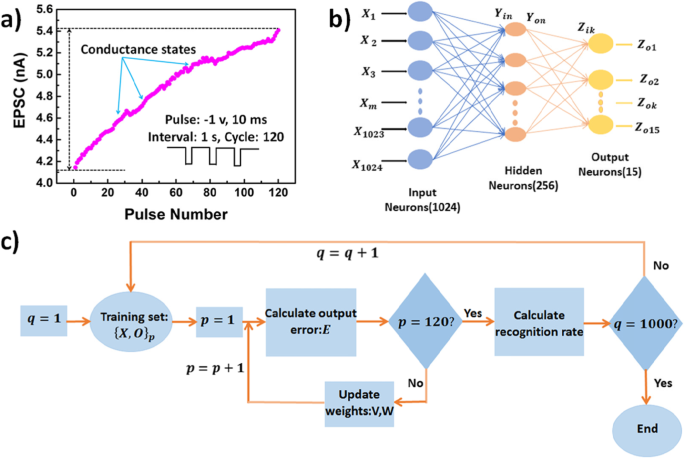
用于人脸识别的人工神经网络。 一 施加 120 个负脉冲后的 120 个电导状态(- 2 V,10 毫秒,脉冲之间的间隔为 1 秒)。 b 具有 1024 个输入神经元、256 个隐藏神经元和 15 个输出神经元的三层 ANN。 c 训练-识别循环流程图
在这项工作中,提出了一种用于人脸识别任务的三层人工神经网络,其结构如图 4b 所示,其中可以看出,输入层由 1024 个神经元组成,对应于图像的 1024 个像素,中间(隐藏)层由256个神经元组成,输出层由15个神经元组成,对应15类人脸。
提议的人工神经网络的发展如下。共有 165 张图片,包括来自 Yale Face 数据库 [28] 的 15 种图片,用于 ANN 训练和测试。每种类型的八幅图像用于 ANN 训练,每种类型的其余三幅图像用于 ANN 测试。鉴于模块是相对于其输入及其内部权重的平滑函数,多层架构可以通过简单的随机梯度下降进行训练,并且梯度通常由反向传播过程计算 [29]。因此,我们使用经典的反向传播 (BP) 算法来构建我们的网络,并展示 BP 算法如何用于我们的 ANN。
在这项工作中,X 米 表示一个输入神经元,因此隐藏神经元的输入值可以表示为:
$$ {Y}_{in}=\sum \limits_{m=1}^{1024}{X}_m{V}_{mn} $$其中 V 百万 表示输入神经元X之间的权重值 米 和一个隐藏的神经元 Y 在 , 和所有 V 百万 形成总共有 1024 × 256 个权重值的矩阵 V;这个矩阵的初始值是随机分配的。隐藏层的激活函数是sigmoid函数,因此隐藏神经元的输出值由下式给出:
$$ {Y}_{on}=\frac{1}{1+{e}^{Y_{in}}} $$因此,一个输出神经元的输入值可以表示为:
$$ {Z}_{ik}=\sum \limits_{n=1}^{256}{Y}_{on}{W}_{nk} $$其中 W nk 表示隐藏神经元Y之间的权重值 开 和一个输出神经元 Z ik , 和所有 W nk 形成矩阵W,共有256×15个权重值; W 的初始值 nk 也是随机分配的。此外,我们使用sigmoid函数作为输出层的激活函数,因此输出神经元的输出值由下式给出:
$$ {Z}_{ok}=\frac{1}{1+{e}^{Z_{ik}}} $$将上述计算出的输出与正确的输出进行比较,可得到总输出误差,表示为:
$$ E=\frac{1}{2}\sum \limits_{k=1}^{15}{\left({O}_k-{Z}_k\right)}^2 $$其中 O k 是正确的输出值。至此,网络的前向传播过程已经完整描述。为了提高识别率,需要通过反向传播过程来计算权重的误差,并用于在下一次迭代中更新网络权重。
$$ \Delta {V}_{mn}=\mu \frac{\partial E}{\partial {V}_{mn}} $$$$ \Delta {W}_{nk}=\mu \frac {\partial E}{\partial {W}_{nk}} $$$$ {V_{mn}}^{\prime }={V}_{mn}+\Delta {V}_{mn} $ $$$ {W_{nk}}^{\prime }={W}_{nk}+\Delta {W}_{nk} $$在上述数学表达式中,ΔV 百万 和 ∆W nk 分别代表V的误差 百万 和 W nk;将误差添加到原始权重后,我们得到更新后的权重 V 百万 ′ 和 W nk ′ ; μ 是学习率,μ =0.06。更新权重后,将新图像馈送到 ANN,并重复权重更新过程,直到所有 120 张图像都用于训练。接下来,我们使用经过训练的网络来识别剩余的 45 张图像并计算识别率。 ANN 测试过程只需要前向传播过程。每个用于测试的图像在前向传播后获得 15 个输出值。输出值反映了输入图像属于某种类型的概率。选择概率值最大的输出,对应的类型就是网络识别出的输入图片的类型。识别结果与标准输出进行比较;所有正确识别的图片都被计算在内,它们的总数为n .在每个训练-识别循环中,识别率r 由以下给出:
$$ r=\frac{n}{45}\times 100\% $$一般来说,第一次识别的识别率很低,而在我们有256个隐藏神经元的ANN中,第一次识别率只有17.78%。重复上述训练-识别过程,直到获得最大识别率。整个训练-识别循环如图4c所示。
如图 5a 所示,在 ANN 开发过程中,不同隐藏神经元的最大识别率和识别率上升速度(训练速度)不同。更多的隐藏神经元导致更高的最大识别率和更快的上升速度,但也增加了能量消耗,因此必须做出一定的权衡。在256个隐藏神经元的情况下,经过600次迭代训练后识别率达到100%,如图5b所示。由于这绝对是可以达到的最大识别率,在我们的 ANN 中,我们将隐藏神经元的数量设置为 256。不同训练-测试周期后的权重值分布如图 5c 所示,它表明更多的周期后权重变得更加分散,也就是说,为了达到更高的识别率,必须调整人工神经网络中的权重。一旦我们达到最大识别率,矩阵 V 和 W 获得最佳权重值。为了更好地证明我们的 ReS2 设备适用于 ANN,权重矩阵中的所有权重值 V 和 W 被设备的电导值取代。我们使用了 I j (j =1, 2, 3⋯120) 表示120 循环后得到的120个电导值,我们对原始电导值进行线性变换,使电导范围与权重范围一致,由下式给出: $$ {C}_j=A{I}_j+B $$ <图片>
人脸识别的实现。 一 不同数量的隐藏神经元(32、64、128 和 256)下的识别率曲线。 b 256个隐藏神经元的识别率曲线;经过近 600 个训练-测试 epoch,识别率达到 100%。 c 10 到 90 个(以 20 为步长)训练时期后的权重值分布。 d 100 到 600 个(以 100 为步长)训练时期后权重值的分布。 e 更换后的识别率;在 100~500 个训练 epoch 后(以 100 为步长)替换权重值
其中 C j 表示线性变换后的权重值。在600 周期的情况下,线性变换系数为A =1.3769 × 10
10
和 B =- 65.784。接下来,我们减去每个 C j 从每个权重值并用 C 替换权重值 j 减法后绝对值最小的那个;即,我们计算了 min|V 百万 − C j |, min|W nk − C j |并用相应的 C 替换每个权重值 j .这样我们就得到了新的V 和 W 权重矩阵,其中所有权重值都替换为 C n .然后,我们在 ANN 测试中使用了我们新的权重矩阵,实现了 100% 的 ANN 识别率,这证明我们的 120 个电导状态可以完美地用作 ANN 中的权重值。为了进一步分析,我们在 100~500 个训练周期后(以 100 为步长)替换权重值,替换后得到的识别结果与原始识别结果完全一致,如图 5d 所示。这证明这120个电流值可以完美替代超过10
5
用于计算的权重值。通过进一步增加门脉冲的数量,可以获得更多的电导状态,证明我们的ReS2器件可以用于大规模神经网络系统。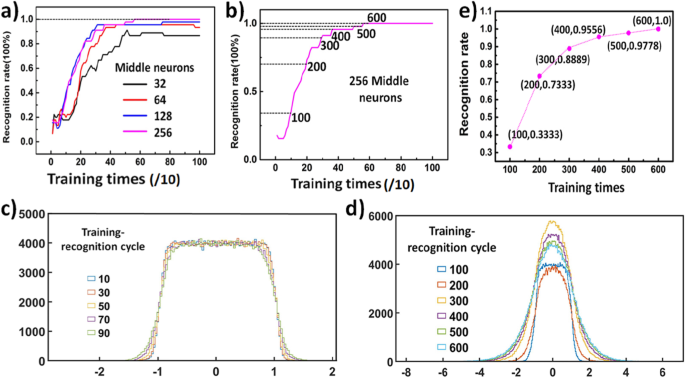
结论
在这项工作中,我们引入了基于高 k 电介质堆栈的 2D ReS2 突触装置,并展示了一些基本的突触行为,例如长期增强和长期抑制。结果表明,我们的 ReS2 设备可以很好地模拟突触性能。此外,构建了一个人工神经网络来证明所提出的设备在人工神经网络中的应用。施加120个周期的栅极电压脉冲,得到120个有效的、清晰可辨的电导状态,用于替代超过10 5 用于人脸识别的 ANN 中的权重。更换后识别率达到100%。这一优异的结果表明,我们的 ReS2 突触可用于构建人工神经网络。
数据和材料的可用性
作者声明材料、数据和相关协议可供读者使用,用于分析的所有数据均包含在本文中。
缩写
- 二维:
-
二维
- ALD:
-
原子层沉积
- ANN:
-
人工神经网络
- LTD:
-
长期抑郁
- LTP:
-
长效增强
纳米材料