

同步计数器
什么是同步 计数器?
同步计数器 , 与异步计数器相反 , 是一个输出位同时改变状态,没有纹波。
我们可以用 J-K 触发器构建这样一个计数器电路的唯一方法是将所有时钟输入连接在一起,以便每个触发器在完全相同的时间接收完全相同的时钟脉冲:
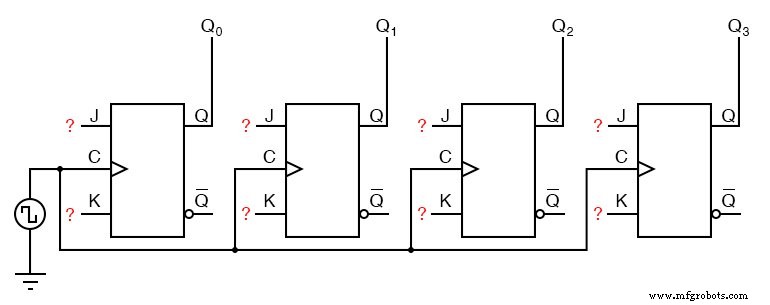
现在,问题是,我们如何处理 J 和 K 输入?我们知道,为了在二进制序列中计数,我们仍然必须保持相同的除以二频率模式,并且这种模式最好利用触发器的“切换”模式来实现,因此事实是J 和 K 输入都必须(有时)“高”是明确的。
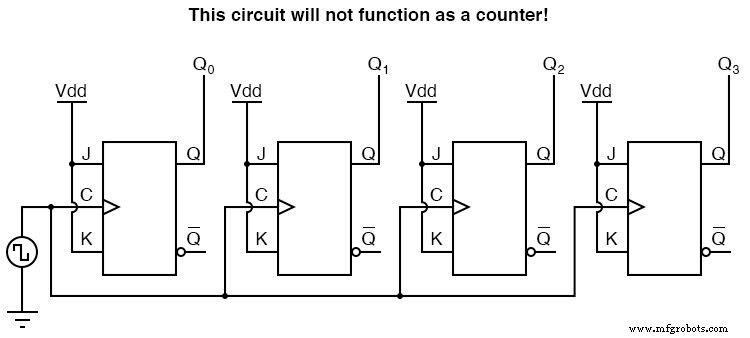
然而,如果我们像在异步电路中那样简单地将所有 J 和 K 输入连接到电源的正轨,这显然是行不通的,因为所有触发器都会同时触发:随着每个触发器时钟脉冲!
让我们再次检查四位二进制计数序列,看看是否还有其他模式可以预测一位的翻转。
异步计数器电路设计基于这样一个事实,即每个位切换发生在前一位从“高”到“低”(从 1 到 0)切换的同时。
由于我们无法根据同步计数器电路中前一位的切换来计时一位的切换(这样做会产生涟漪效应),因此我们必须在计数序列中找到一些其他模式可用于触发位切换:
检查四位二进制计数序列,可以看到另一种预测模式。
请注意,就在一个位切换之前,所有前面的位都是“高”:
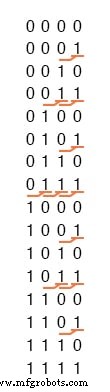
我们在设计计数器电路时也可以利用这种模式。
同步 “向上”计数器
如果我们根据所有前面的触发器输出(Q)是否为“高”使每个 JK 触发器切换,我们可以获得与异步电路相同的计数序列,而没有纹波效应,因为每个触发器在这个电路中将在完全相同的时间计时:
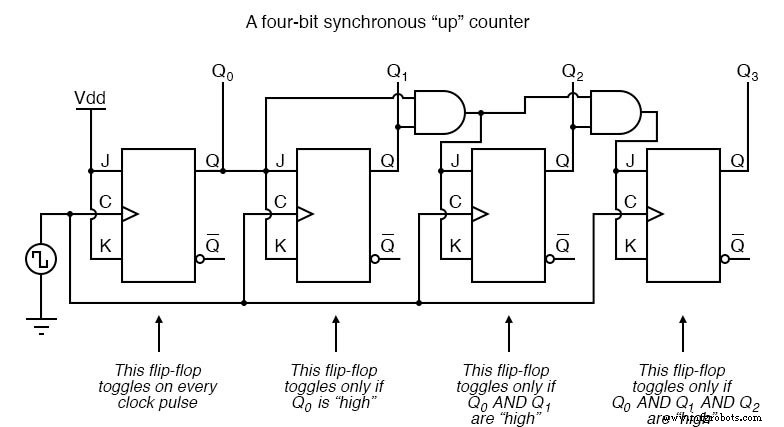
结果是一个四位同步 “向上”计数器。如果所有先前触发器的 Q 输出为“高”,则每个高阶触发器都准备好切换(J 和 K 输入均为“高”)。
否则,该触发器的 J 和 K 输入都将为“低”,将其置于“锁存”模式,在下一个时钟脉冲时将保持其当前输出状态。
由于第一个 (LSB) 触发器需要在每个时钟脉冲处触发,因此其 J 和 K 输入连接到 Vcc 或 Vdd,它们将始终为“高”。
下一个触发器只需要“识别”第一个触发器的 Q 输出为高电平即可准备触发,因此不需要与门。
但是,仅当 all 低阶输出位为“高”,因此需要与门。
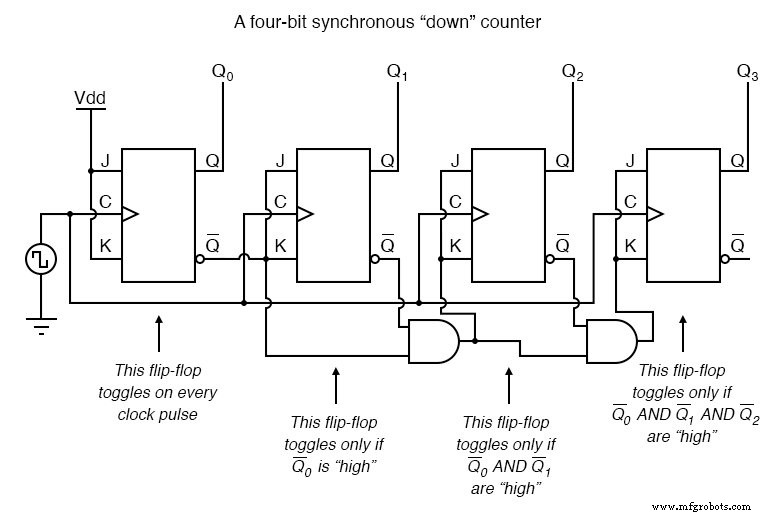
同步“向下”计数器
为了制作同步“递减”计数器,我们需要构建电路来识别适当的位模式,在递减计数时预测每个触发状态。
毫不奇怪,当我们检查四位二进制计数序列时,我们看到所有前面的位在切换之前都是“低”的(按照从下到上的顺序):

由于每个 JK 触发器都配备了一个 Q' 输出以及一个 Q 输出,我们可以使用 Q' 输出来启用每个后续触发器的切换模式,因为每个 Q' 每次都会“高”相应 Q 为“低”的时间:
具有可选“向上”和“向下”计数模式的计数器电路
将这个想法更进一步,我们可以构建一个计数器电路,可以在“向上”和“向下”计数模式之间进行选择,方法是让双线与门检测“向上”和“向下”计数序列的适当位条件,分别,然后使用或门将与门输出组合到每个后续触发器的 J 和 K 输入:
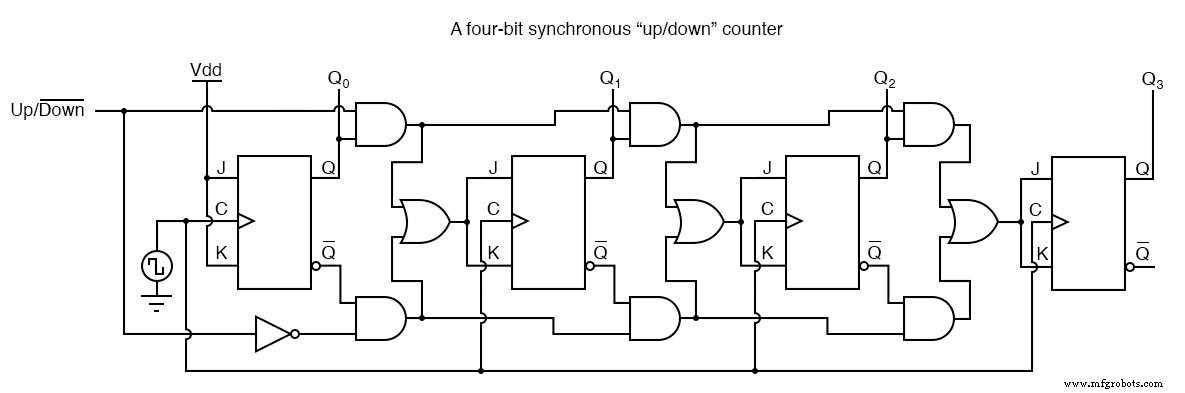
该电路并不像最初看起来那么复杂。 Up/Down 控制输入线简单地启用与门的上串或下串将 Q/Q' 输出传递到触发器的后续阶段。
如果向上/向下控制线为“高”,则顶部与门将被启用,该电路的功能与本节中所示的第一个(“向上”)同步计数器电路完全相同。
如果向上/向下控制线设置为“低”,则底部与门将被启用,该电路的功能与本节中所示的第二个(“向下”计数器)电路相同。
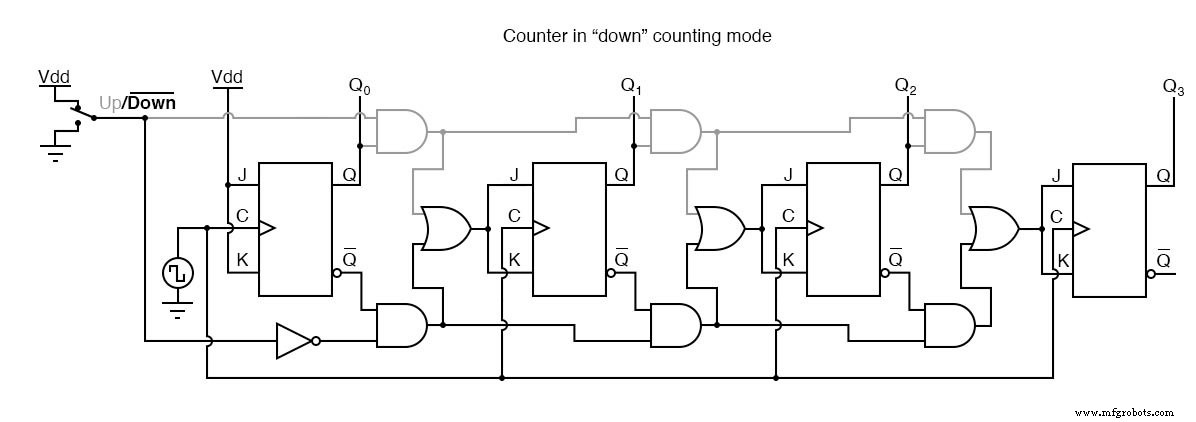
为了说明这一点,下面是一个显示“向上”计数模式下的电路图(所有禁用的电路显示为灰色而不是黑色):

此处,以“向下”计数模式显示,相同的灰色表示禁用的电路:
向上/向下计数器电路是非常有用的设备。一个常见的应用是在机器运动控制中,其中称为旋转轴编码器的设备 将机械旋转转换为一系列电脉冲,这些脉冲“计时”计数器电路以跟踪总运动:
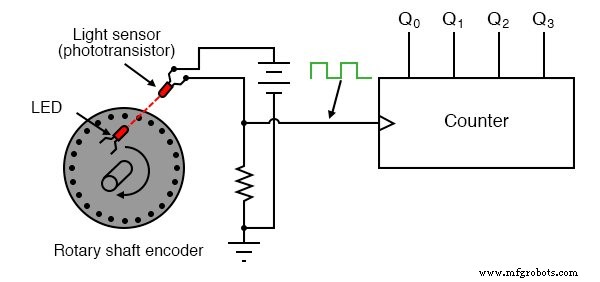
当机器移动时,它转动编码器轴,使 LED 和光电晶体管之间的光束产生和断开,从而产生时钟脉冲使计数器电路递增。
因此,计数器对轴的总运动进行积分或累积,作为机器移动多远的电子指示。
如果我们只关心跟踪总运动,而不关心方向的变化 运动,这样安排就足够了。
但是,如果我们希望计数器递增 有一个运动方向和递减 对于相反的运动方向,我们必须使用递增/递减计数器,以及具有区分不同方向能力的编码/解码电路。
如果我们重新设计编码器,使其具有两组 LED/光电晶体管对,那么这些对对齐使得它们的方波输出信号为 90 o 彼此异相,我们有所谓的正交输出 编码器(“正交”一词仅指 90 o 角分离)。
一个相位检测电路可以由一个D型触发器组成,用于区分顺时针脉冲序列和逆时针脉冲序列:
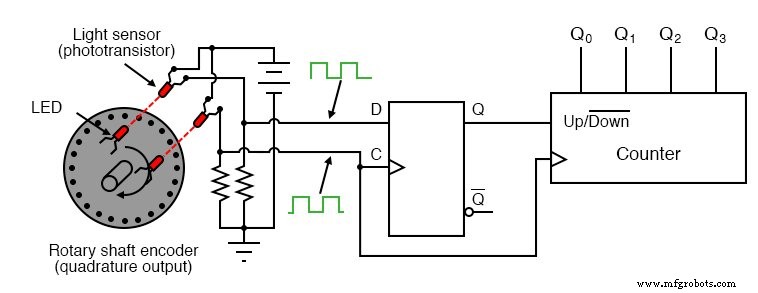
当编码器顺时针旋转时,“D”输入信号方波将领先于“C”输入方波,这意味着当“C”从“低”转变为“高”时,“D”输入已经为“高”。 “高”,因此设置 每个时钟脉冲的 D 型触发器(使 Q 输出为“高”)。
“高”Q 输出将计数器置于“向上”计数模式,时钟从编码器(来自任一 LED)接收到的任何时钟脉冲都将增加它。
反之,当编码器反转时,“D”输入将滞后于“C”输入波形,即“C”波形由“低”转为“高”时为“低”,迫使D -type触发器进入reset 状态(使 Q 输出为“低”)每个时钟脉冲。
这个“低”信号命令计数器电路随着来自编码器的每个时钟脉冲递减。
该电路或类似的电路是每个基于脉冲编码器传感器的位置测量电路的核心。
此类应用在机器人技术、数控机床控制以及其他涉及可逆机械运动测量的应用中非常普遍。
相关工作表:
- 同步计数器工作表
工业技术