

3D 打印步进电机
组件和用品
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
关于这个项目
https://www.youtube.com/embed/v2FNUNALSTw我最近遇到了这个 3D 打印直流电机的教学,我想我可以把它步骤 更远;字面上地。我用八个电磁铁、六个钕磁铁、一个 3D 打印的转子和定子外壳设计了这个步进电机。这特别是一种永磁步进电机,能够实现 15 度全步和 7.5 度半步。有许多不同类型的步进电机,但其中大多数的工作原理与我在这里设计的非常相似。这是一个教育展示,向其他人展示步进电机的工作原理。我将其设计为在 5-12VDC 电源上运行,因此它适用于大多数 USB 电源。
我也在我的 Youtube 频道上做赠品。我将赠送一个 arduino、这个项目中使用的晶体管和一些开关。最后一步中的更多详细信息。
第 1 步:您需要什么
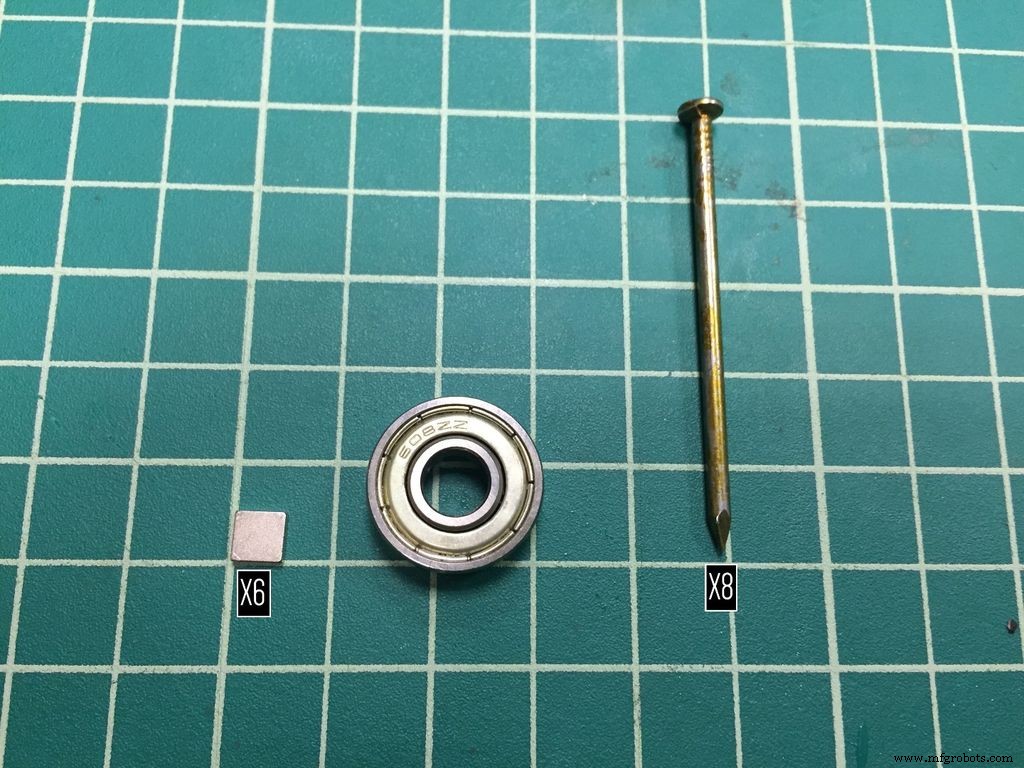


- 六个 1/4" 钕磁铁
- 608ZZ轴承
- 8 颗 8d 2-3/8" 钉子 - 只要适合,你使用什么钉子并不重要。
- 电磁线 - 我使用了 0.315 毫米的电磁线,但这并不重要。
- Arduino Uno
- 四个晶体管 - 我使用了 PNP 晶体管,但您可以使用任何您想要的晶体管或 MOSFET,只要您确保它们能够处理您的电机将消耗的电流。仔细阅读数据表以了解具体建议。在 5v 矿用电机上消耗大约 1 安培,在 12v 上它需要大约 3 安培。
- 3D 打印转子和定子
- 胶水
- 电工胶带
- 指南针
第 2 步:打印十二边形转子和八边形定子
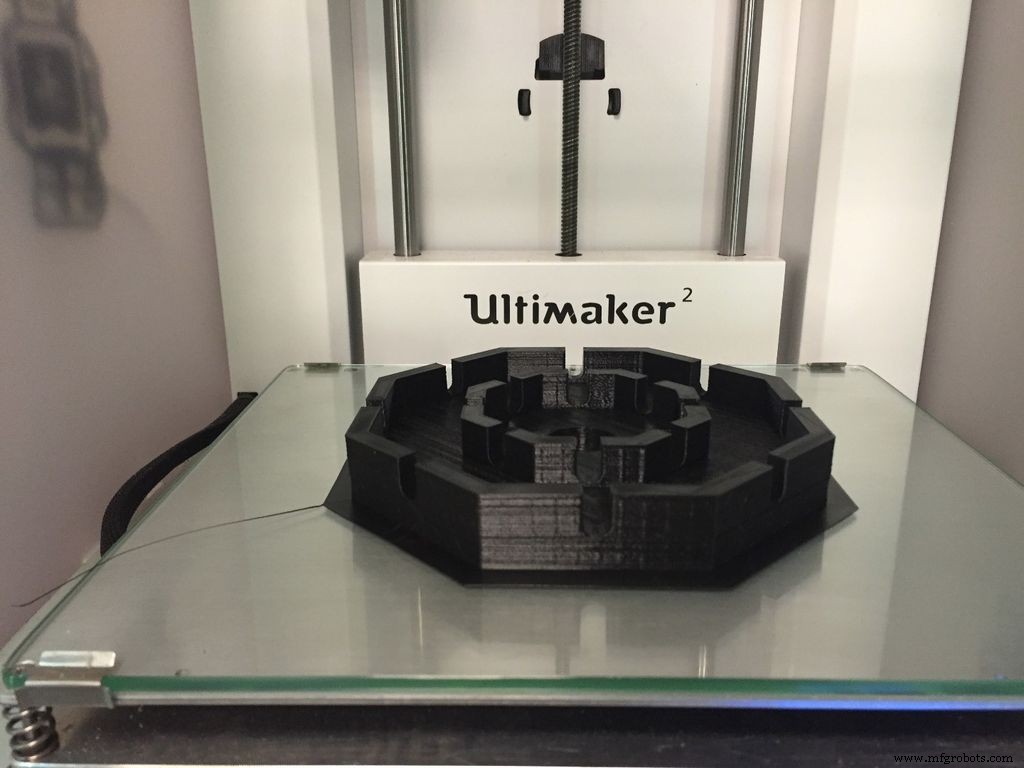
使用 3D 中心打印!
第 3 步:



使用指南针确定磁铁的磁极,并将磁体的北极朝外粘合。如果您的磁铁足够强,某些智能手机上的指南针会显示磁铁的极性。
第 4 步:
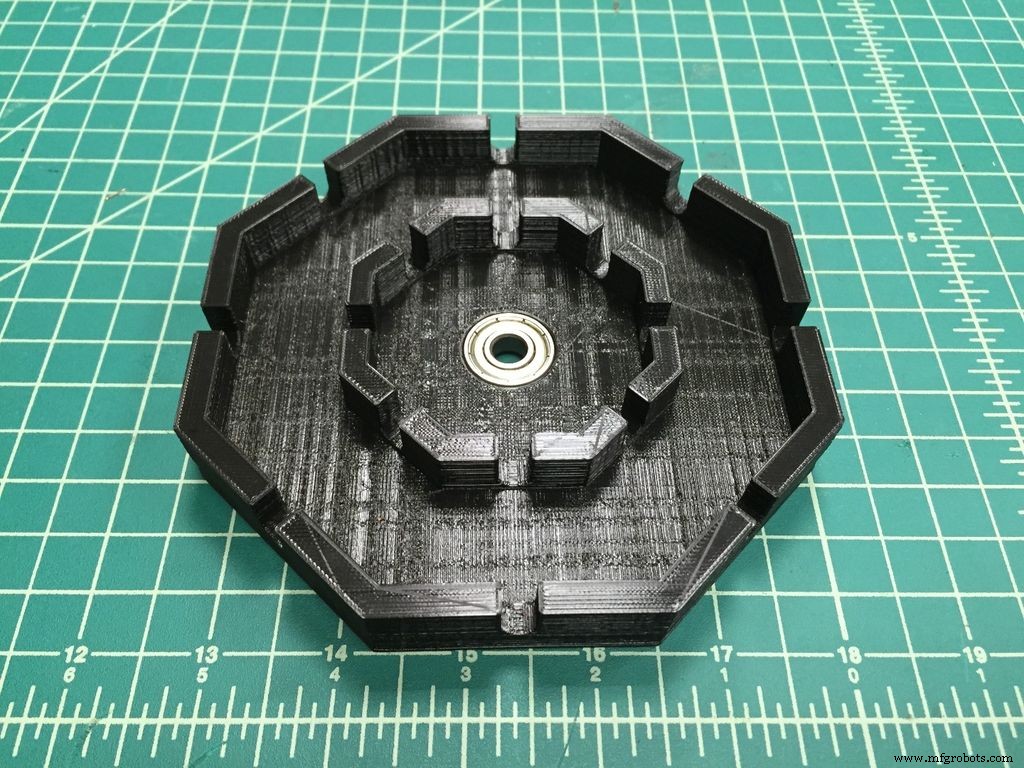

将轴承压入定子,然后将转子压入轴承。我惊喜地发现轴承压入定子的效果如何。在 3d 打印时,孔往往想要向内收缩并最终比预期的要小,所以我通常会将它们放大一点。
第 5 步:
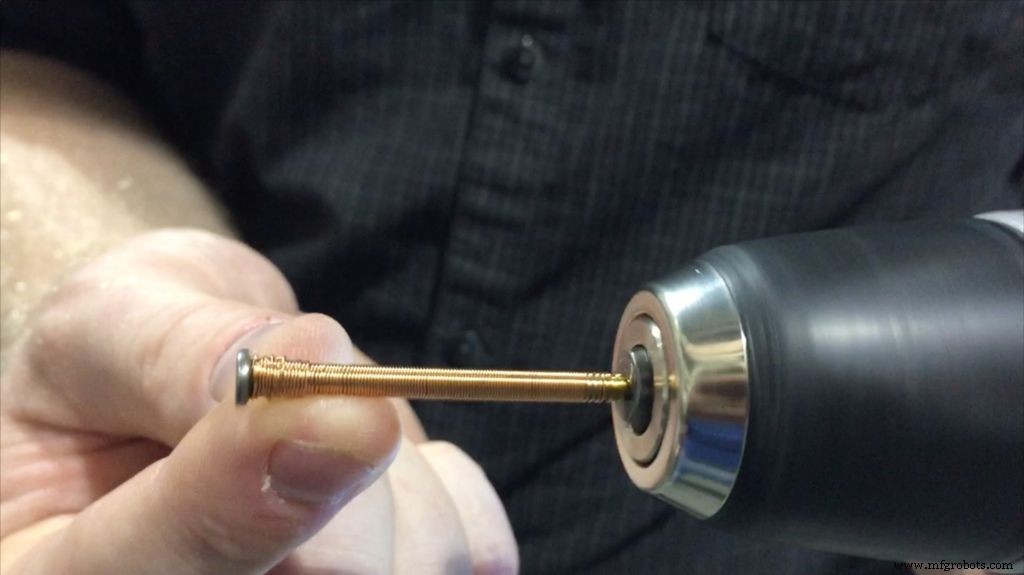

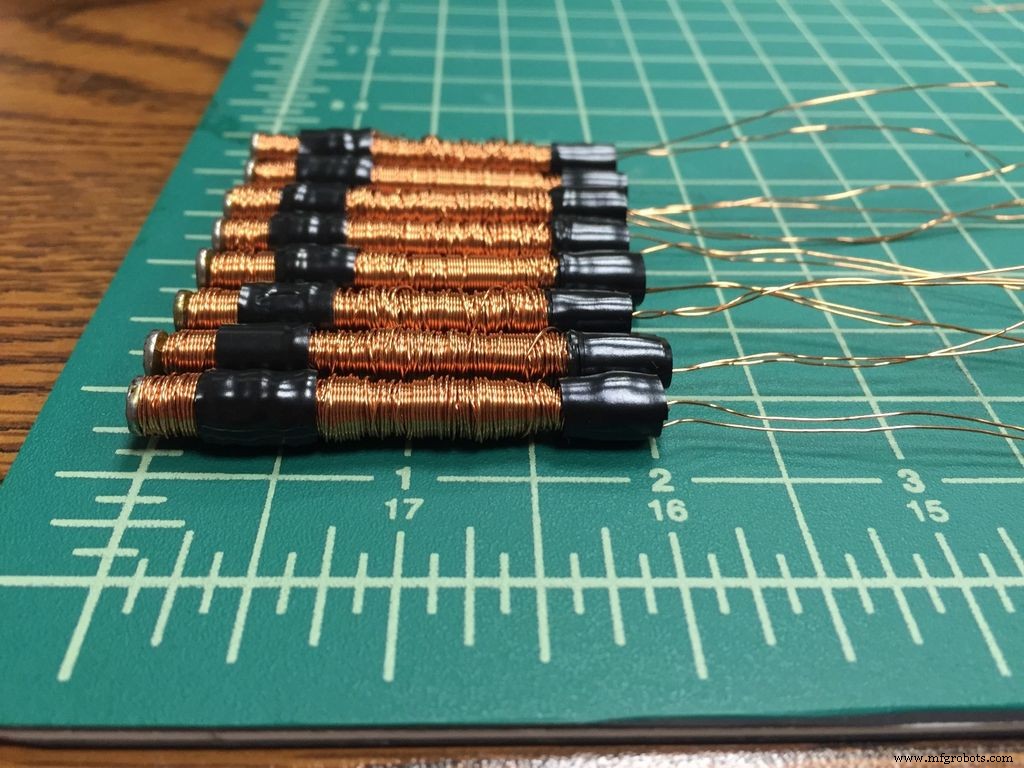
将 9 根电线切成 25 英尺,然后用钻头缠绕。使用指南针和电池确定在钉子的头部为您提供南极所需的配置。使用记号笔或热缩管标记电磁铁的负极。用电工胶带包裹电磁铁的各个部分,它们将与定子外壳接触。这有两个目的。它将电磁铁牢固地固定到位,并使外壳与线圈可能产生的任何热量绝缘。线圈对使用我正在使用的 5V 电源消耗大约 1 安培的电流。我选择的晶体管可以使用 12V 电源来处理,线圈从中吸取大约 3 安培电流。较高电压电源的问题在于,如果我让它运行一段时间,线圈就会开始变热。
警告:
我将其设计为在 5-12VDC 电源上运行。如果您决定偏离常规路线,请使用欧姆定律来确定您想要的线圈尺寸。 V =I*R
请记住,线圈上的绕组越少,电阻就越低。如果你不小心,你的线圈会拉出比你的电源或晶体管所能承受的更多的电流,而且会发生不好的事情。
第 6 步:
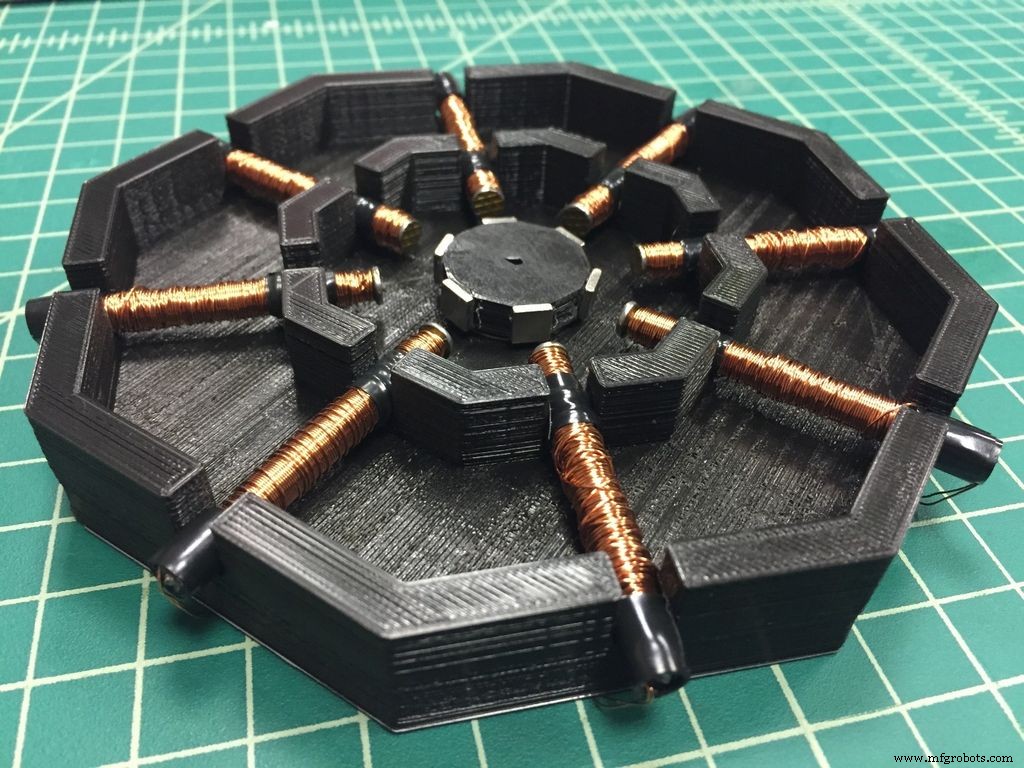
将电磁铁推入定子,直到它们距离钕磁铁约 1/4"。您可以根据需要将电磁铁滑入和滑出,但我不希望它们靠得太近,因为钉子会更快地被磁化。这是使用钉子的缺点。一旦它们被磁化,电机仍然可以工作,但效率会降低。如果你有一些铺设,焊条是钉子的一个很好的替代品。
第 7 步:将所有东西焊接在一起
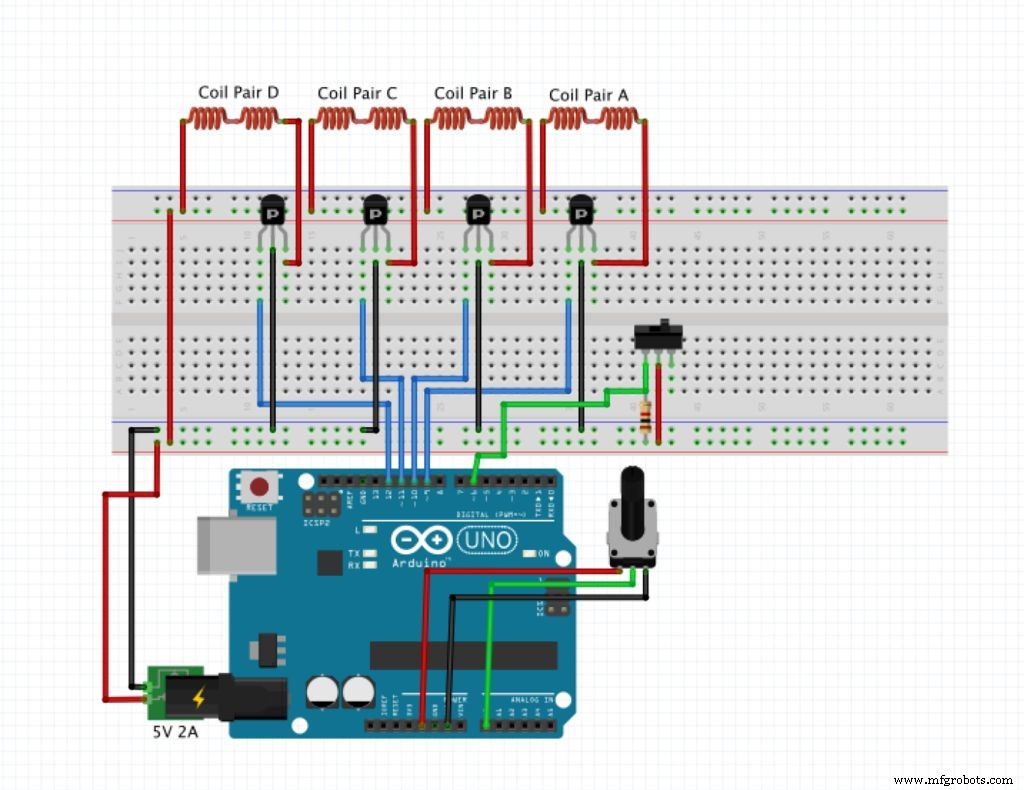
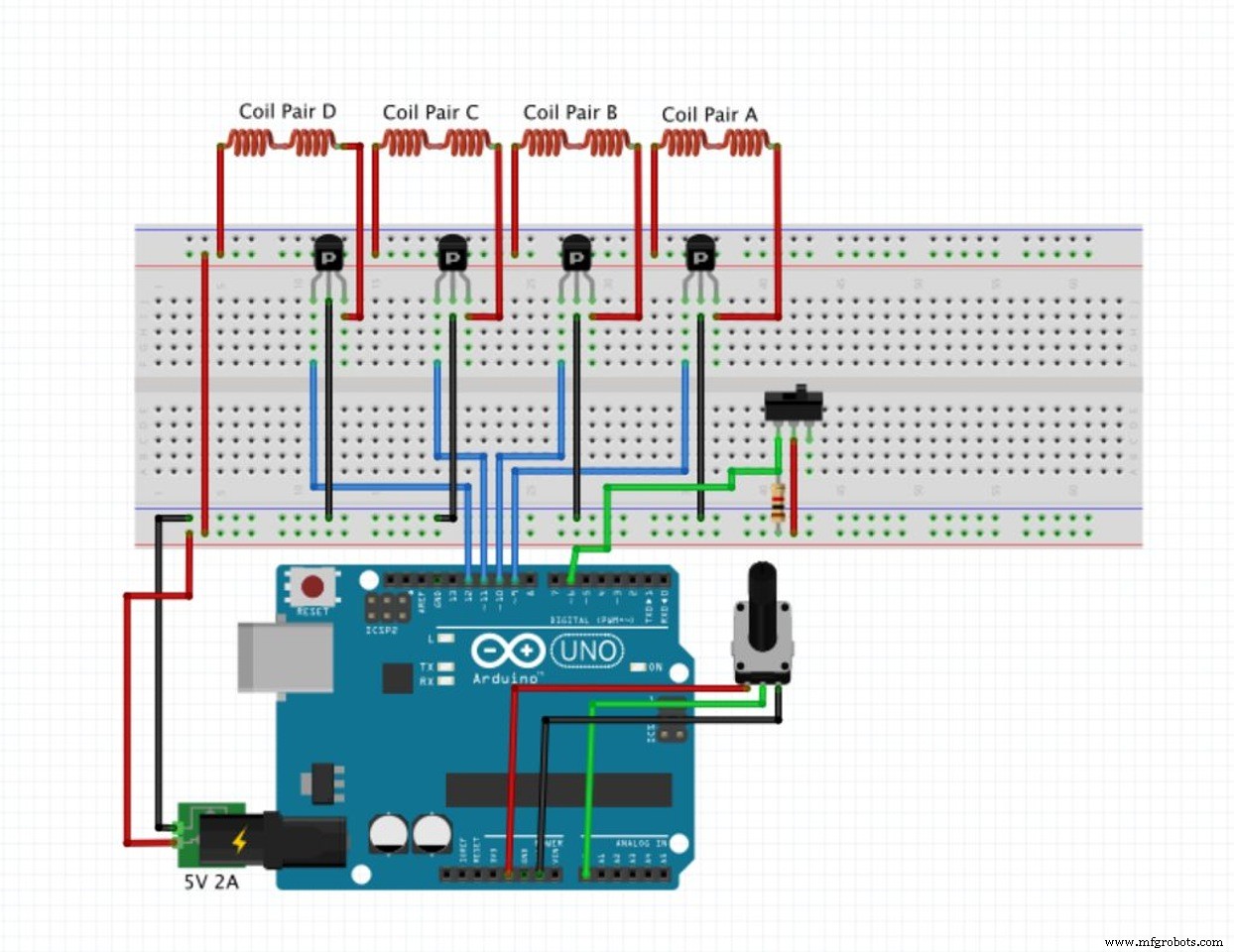
将线圈对串联并连接起来,使电磁铁的所有南极都朝内。我在原理图中使用的电阻是 1k 电阻。这样做的目的是防止数字引脚在关闭位置时“浮动”高。同样,请确保使用能够承受线圈所需电流的晶体管。
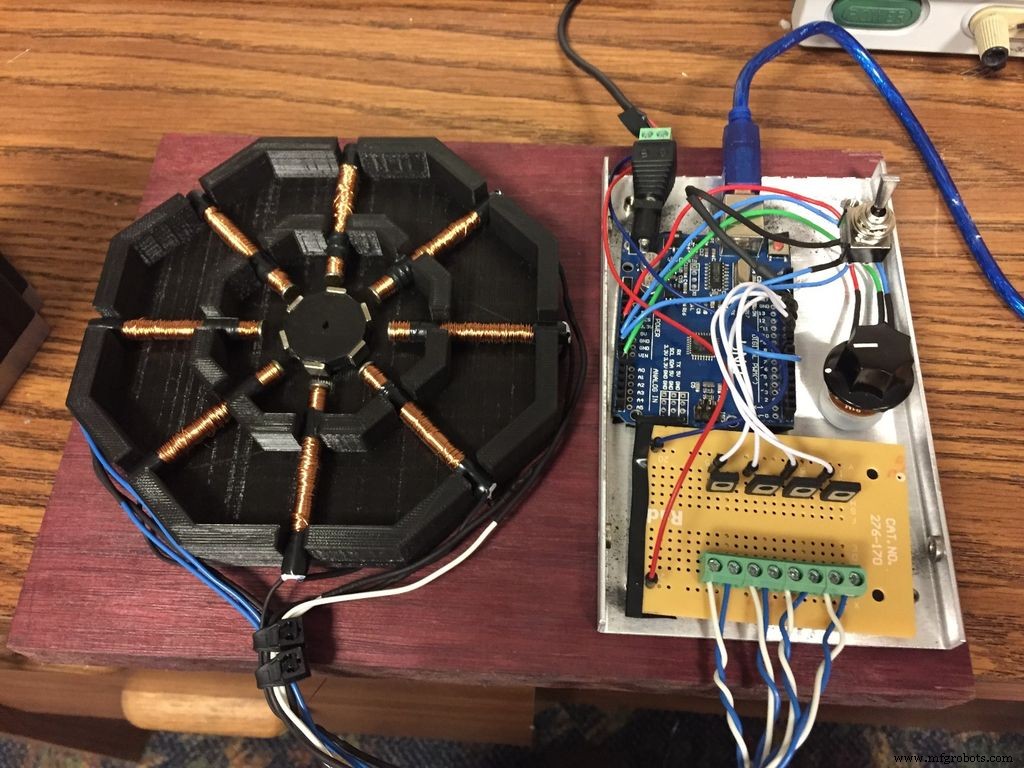
将源代码加载到您的 arduino 中,您就可以开始了!
第 8 步:提前付款!

我将赠送一个 arduino、这个项目中使用的晶体管,以及一些开关和跳线。
赠品规则:
订阅我的 YouTube 频道,喜欢 此视频 并在视频上发表评论,说明您希望我接下来制作什么。 9 月 1 日我将随机选择订阅者的评论并免费发送!感谢你们如此热情的社区!
代码
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.ino纯文本
/ * 010100000111001001101111011101000110111100100000010001113D印刷步进MotorCreated 8月15日,2015Modified 8月15日,2015by安东尼加罗法洛(原G)这里访问我的YouTube频道:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7HpTpZwVisit我Instructables页面在这里:HTTP:/ /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ |_____] |_____/ | | | | | | ____ | | \_ |_____| | |_____| |_____| 01010000011100100110111101110100011011110010000001000111*/int Delay;int reverseSwitch;void setup() { // 将数字引脚 13 初始化为输出。 pinMode(9,输出); pinMode(10,输出); pinMode(11,输出); pinMode(12, 输出); pinMode(13,输出); //用于视觉 pinMode(6, INPUT) 的 LED 引脚; //拨动开关连接到数字引脚 6 用于反转方向 }void loop() { reverseSwitch =digitalRead(6); if(reverseSwitch ==HIGH){//如果反向开关为高电平,则逆时针旋转转子 Delay =analogRead(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(12,高);数字写入(13,高);延迟(延迟);数字写入(12,低);数字写入(13,低);延迟(5);延迟 =模拟读取(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(11,高);延迟(延迟);数字写入(11,低);延迟(5);延迟 =模拟读取(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(10,高);数字写入(13,高);延迟(延迟);数字写入(10,低);数字写入(13,低);延迟(5);延迟 =模拟读取(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(9,高);延迟(延迟);数字写入(9,低);延迟(5); } else{//如果反向开关不高,顺时针旋转转子 Delay =analogRead(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(9,高);数字写入(13,高);延迟(延迟);数字写入(9,低);数字写入(13,低);延迟(5);延迟 =模拟读取(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(10,高);延迟(延迟);数字写入(10,低);延迟(5);延迟 =模拟读取(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(11,高);数字写入(13,高);延迟(延迟);数字写入(11,低);数字写入(13,低);延迟(5);延迟 =模拟读取(0);延迟 =地图(延迟,0, 1023, 60, 2000);数字写入(12,高);延迟(延迟);数字写入(12,低);延迟(5); } } 定制零件和外壳
示意图
制造工艺