

Swiper - 自动 Tinder/Bumble Swiper
组件和用品
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
应用和在线服务
 |
|
关于这个项目
背景故事
我的朋友让我成为了一个 Tinder,就像应用程序上的大多数人一样,我很快就对它的单调感到失望。然后我意识到我是一个更好的工程师,然后我是一个潜在的伙伴,所以我用一个便宜的步进电机把它拼凑在一起。因此,现在您还可以在 Bumble 或 Tinder 上使用此功能每小时获得超过 800 次滑动!
快速概览:
此构建包含三个快速步骤:打印零件、接线 + 测试步进电机,然后将所有内容放在一起。
第 1 步:打印零件
查看 https://www.thingiverse.com/thing:2849598 以获取 3D 可打印文件。关于这些文件的主要注意事项是,我使用 50% 的填充物来创建底座,这是为了降低底座的重量,使其在滑动时不会四处移动。
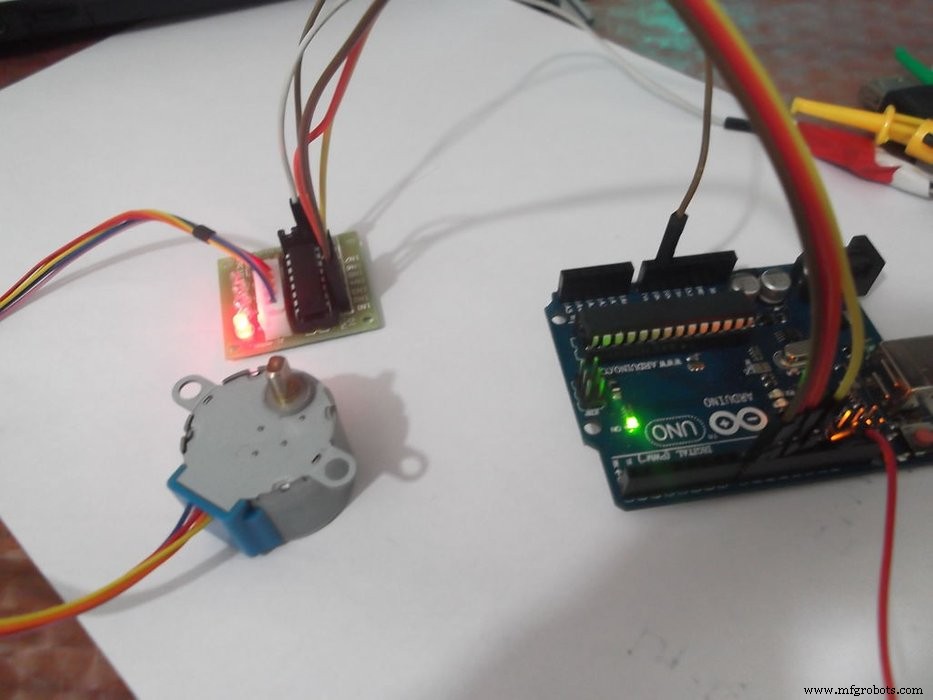
第 2 步:步进电机
我使用了单极 28-BYJ48 步进电机和 SBT0811 步进电机驱动器。任何与 28-BYJ48 配合使用的步进电机驱动器都应该没问题,只需确保根据以下设置将其连接到您的 Arduino Uno,或者更改代码以反映您的更改:
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5V
- 接地>> 地面
Arduino Uno 的代码位于页面底部。在这一点上,您应该能够将代码上传到您的 Arduino 并有一个顺时针旋转的步进电机!如果你想改变方向为逆时针旋转只需切换 Direction 变量为 false

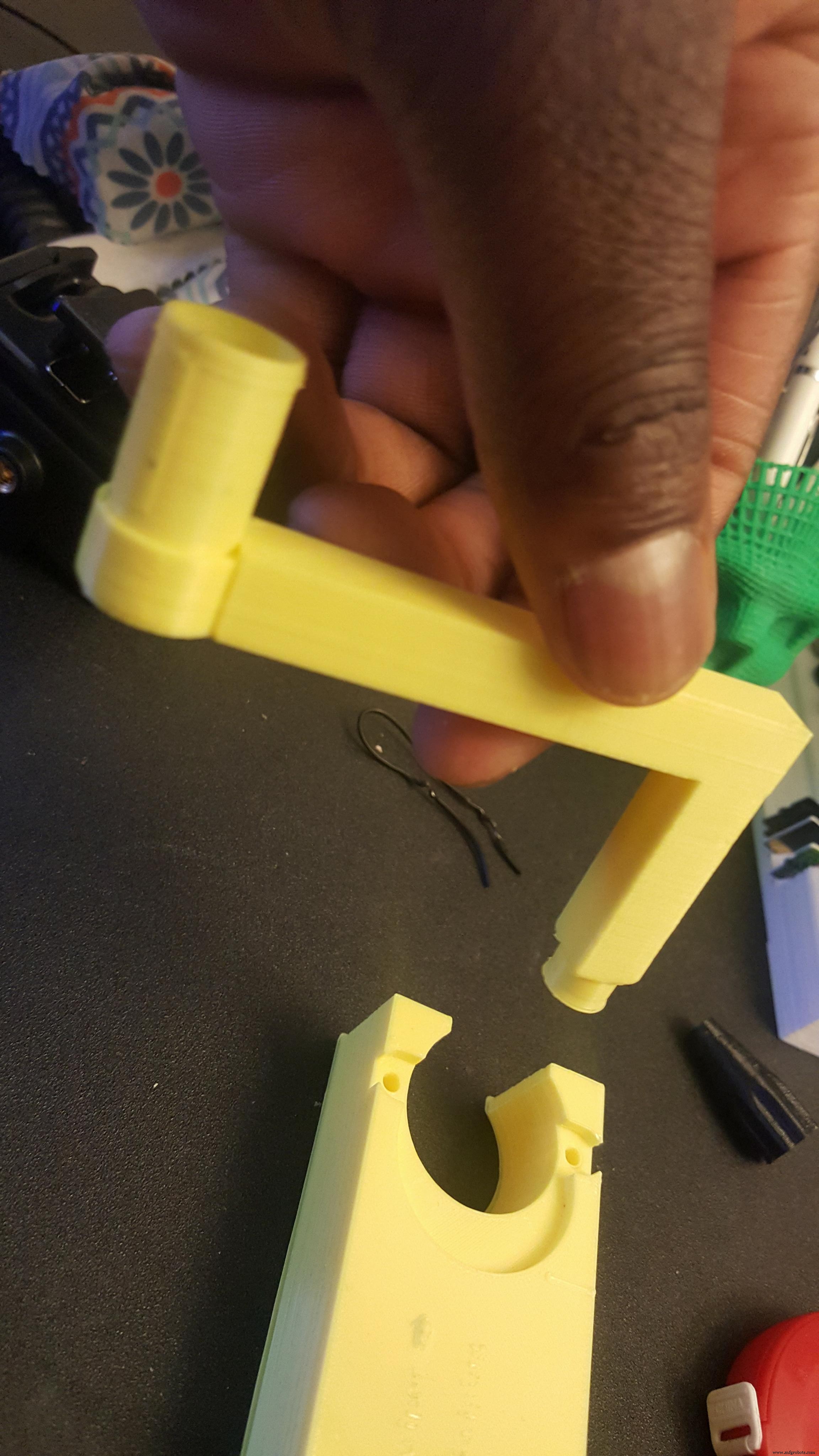
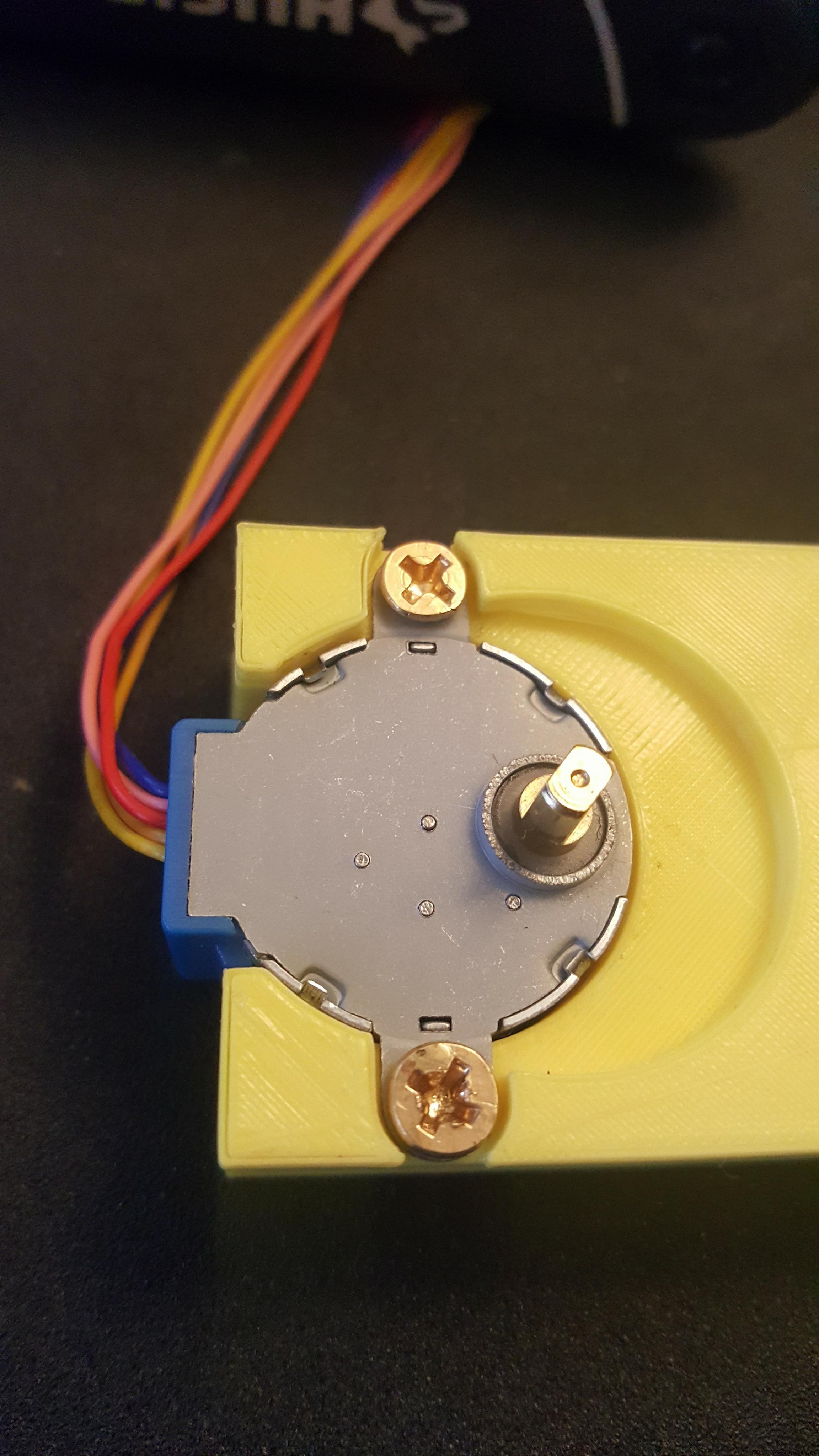
第 3 步:将所有内容放在一起
此时,您已准备好所有单独的部分,我们只需要将它们组合起来!继续,首先将您的步进电机放在 swiper-base 内。我用两个小木螺钉将其固定到 3D 打印中。
然后继续将swiper手柄放在步进电机上。
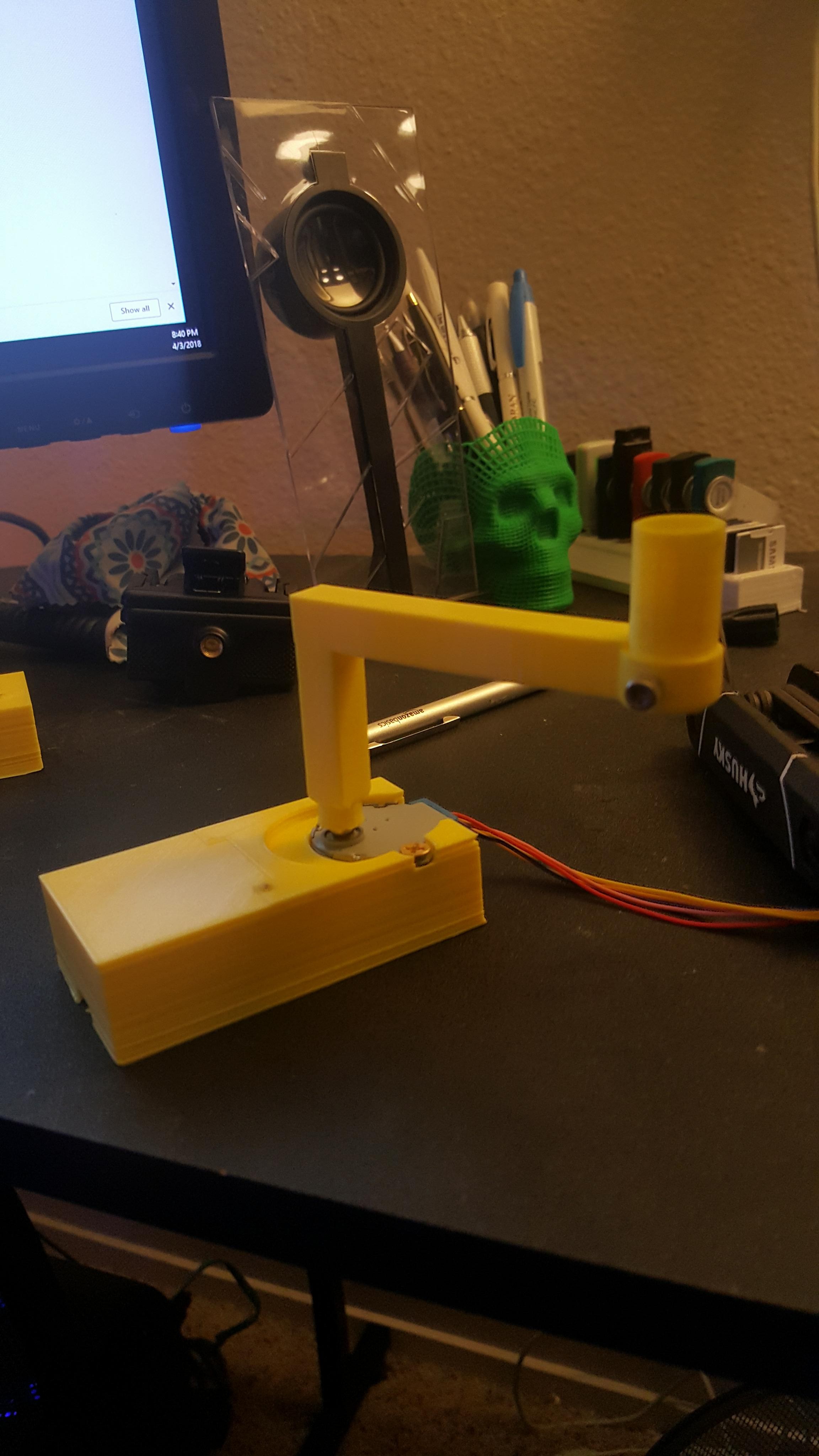
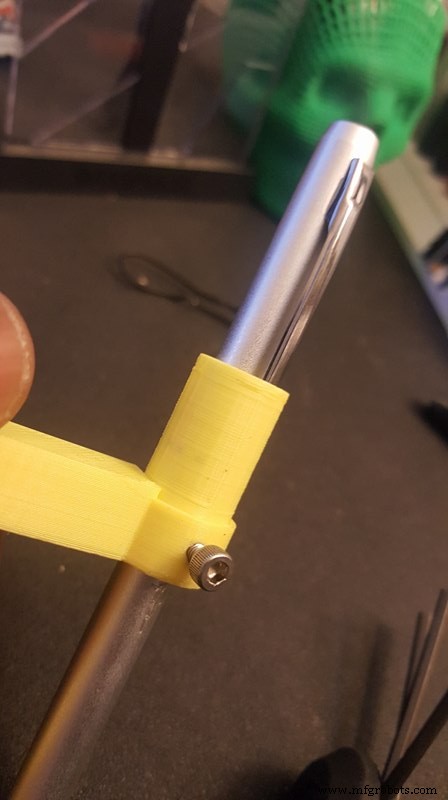
为了校准高度;将整个结构放在手机上方,然后将触摸屏笔放入滑动手柄,直到触摸屏笔接触屏幕。

在这一点上,继续使用一个短的 M3 螺钉并固定您的触摸屏笔,使其在滑动时不会移动。
终于可以刷了
将整个结构放在手机旁边,打开所需的约会应用程序,转动 Arduino 应用程序并坐下!
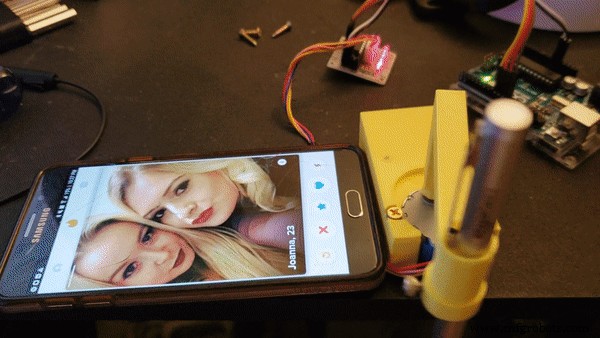
我已经在 4 部不同的手机上对此进行了测试,其中一部手机无法正确注册滑动,并且会转到上一个屏幕。这是因为上次测试的手机边缘非常敏感,您可以将手机放在边缘凸起的保护套中来解决这个问题,这样触摸屏笔就不会在屏幕边缘记录。
代码
- Swiper
SwiperArduino
如果要更改滑动方向,请更改方向 =false 为 true!/* BYJ48 Stepper motor code Connect :IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd 写入: Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 */#define IN1 8#define IN2 9#define IN3 10#define IN4 11int Steps =0;boolean Direction =false; //向右滑动更改为真unsigned long last_time;unsigned long currentMillis;int steps_left=4095;long time;void setup(){Serial.begin(115200);pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, 输出); pinMode(IN4,输出); // delay(1000);}void loop(){ while(steps_left>0){ currentMillis =micros(); if(currentMillis-last_time>=1000){ stepper(1);时间=时间+微秒()-last_time; last_time=micros(); steps_left--; } } steps_left=4095;}void stepper(int xw){ for (int x=0;x7){Steps=0;}if(Steps<0){Steps=7; }} 制造工艺