

机器人如何实现完全自主?
当大多数人想到完全自主的机器人时,他们会担心幻想的人工智能场景,这些场景几乎没有我们所知道的关于意识的真实事实和奥秘。在关注这一点的同时,当存在各种需要更多帮助以提高盈利能力和积极影响的工作、流程和行业时,人们更难看到可以独立运作且无需大量监督的机器人的实际价值。
与此同时,机器人自主性一直是一些失控的定义和期望的受害者,这些定义和期望不一定有助于理解机器人需要什么才能变得自主以及在哪里 可以最快地实现自主。
要让机器人达到完全自主,必须满足多个标准:
- 机器人必须能够自行获取有关其环境的有意义的信息
- 机器人必须能够以结构化且可用的方式处理该信息
- 机器人必须能够根据该信息计划他们的行动
- 机器人必须能够及时执行它生成的计划
在所有这些情况下,了解更多事情很重要 就这些参数的结构而言:
- 机器人必须有一个目标。虽然我们传统上将人类自主性与设定自己目标的能力联系在一起,但没有预期的参数可以让当今的机器人具有自我意识。
- 机器人的自主性必须特定于用例。一辆完全自动驾驶的汽车可以在不同的层面上运行——有些在高速公路上,有些在所有地形上。根据情况,两者都可以行使相同程度的自主权。
- 该设计在最大限度地减少对人工输入的需求时效果最佳——虽然某些自主的“协作机器人”应用程序可以帮助优化生产力或实现预期目标,但在大多数情况下,在人类直接参与的情况下,自主性并不是一个充分的限定条件是必须的。
那么,我们如何从 A 点到 B 点呢?传统的“可编程”机器人如何变得完全自主?好吧,这就是乐趣开始的地方!
获取环境信息
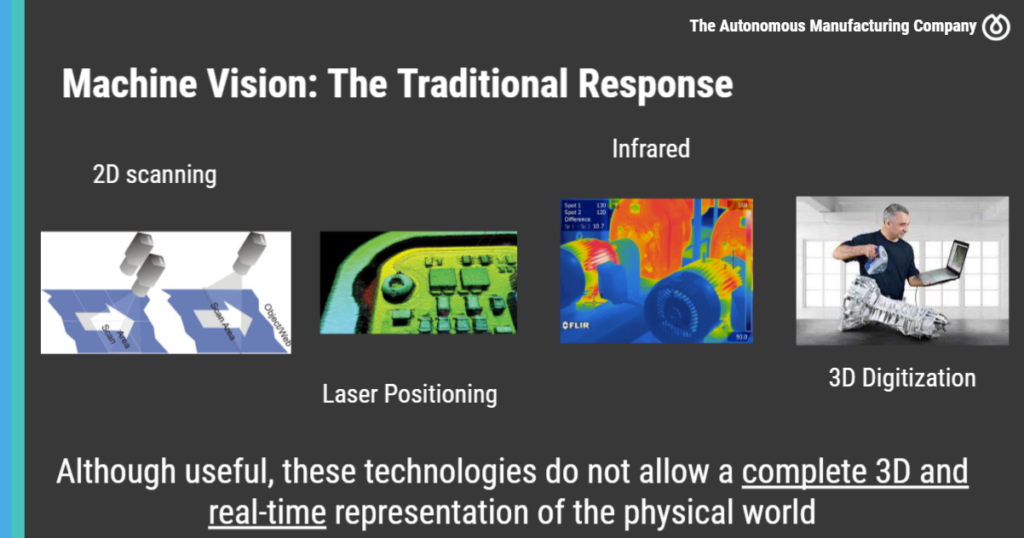
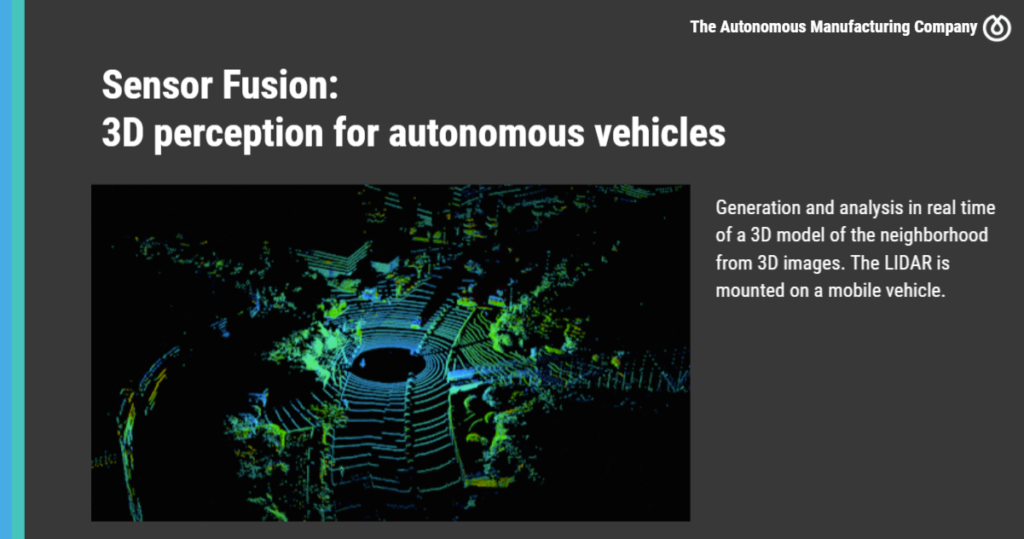
有多种解决方案可以让机器人了解周围发生的事情。激光雷达、雷达、声纳、触觉传感器、所有不同类型的视觉系统、来自机器人外传感器、摄像头或本地信息系统的无数不同的通信机制,这些系统可能是音频或视频。所有这些都只是试图赋予机器人与人类相同的感官,并且长期以来一直是高度专业化自动化过程的自动机器控制等领域的标准。
重要的是要考虑到感测并不是这里的唯一限制。例如,在现在支持 IoT(物联网)的工业系统中——或者至少是联网的——不同的过程和可编程逻辑控制器可以用不同的字符串连接在一起,用于执行不同的过程。然而,从那里可以做的实际上是将这些信息整合到机器人过程中,以了解在物体上发生的位置、方向和所需的操作。
在工业环境之外,可以应用相同的模型,但需要将它们与正确类型的连接信息结合起来。例如,如果有人想要创建一个用于医疗或老年护理的机器人,外部传感功能可能有助于管理患者的健康,但如果没有适当的安全性和匿名化,他们也可能在涉及到谁是隐私或代理时带来风险。在什么情况下由什么机器人照顾和照顾。
同样,5G 被视为在未来自动驾驶汽车之间进行协调并提高驾驶和交通各个方面的自动化效率的重要机会——同时围绕道路状况、瓶颈、道路堵塞等进行优化。虽然这些是非常强大的应用程序,但必须精心处理将信息转换为机器人的方式。毕竟,权力越大,责任越大。
以结构化的方式处理信息
人们应该如何以一种可用的方式消化信息?当我们考虑我们作为人类的行为方式时,就我们如何做出决定而言,这是第二天性或通常是本能。我们经常没有意识到的是,我们的许多决定都是基于进化的、社会的或行为上获得的特征——以及我们个性的特征——这使得我们的运作方式有时看起来是确定性的,尽管并非没有任何惊喜或乐趣!
然而,当谈到机器人时,我们不喜欢惊喜!惊喜是肯定的——像发现机器人比我们希望的更好或更高效这样的事情很棒,但如果这意味着我们需要预测自主机器人的每一个可能的功能——无论是在交付、运输、护理方面、材料处理、检查、预测性维护、工业流程或简单的后空翻机器狗——管理我们的期望比“无法正常工作”要好得多。
正因为如此,重要的是要意识到创建一个自主机器人很少意味着事情开箱即用。虽然一些公司和学者正在努力简化自主机器人的基本传感和处理模型,但这些模型最终必须有助于简化机器人以可操作方式使用信息的能力的过程模型。
从数据规划行动
机器人传感机制生成的数据可以通过多种方式进行消化。最终,对于 3D 视觉数据,最简单的方法是将形状上的数据分解并重新整合为一个完整的对象。这是一个并行过程,需要积累许多小操作——而人脑以这种方式运作非常灵活,为这种类型的处理生成可靠的模型需要大量的重复和验证。
这个过程最有用的方面是将数据注入到机器人需要做的任何事情的整体过程模型中。举起东西?将邮件放入信箱?油漆或焊接在一起?这些操作中的每一个都需要全面了解目标的性质、位置、位置和不合规的结果(例如,邮件进入了盒子,但底部有一个洞,它掉进了灌木丛中)。
同时,为了扩展这个邮件示例,必须建立回退目标,以便以自动化的方式达到仍然可以接受的结果,而不会增加机器人自主功能的主要优先级。更简单地说:自主机器人必须能够即兴发挥,但计划即兴发挥需要大量工作。
正如马克吐温曾经说过的那样,“准备一篇好的即兴演讲通常需要我三个多星期的时间。”这不是简单的油嘴滑舌,但实际上对人类的工作方式非常有指导意义。虽然我们可能经常专注于手头的任务,但我们有一套复杂的潜意识习惯,并带有诸如“本体感受”之类的额外才能,但这些才能并未得到很好的认可。
虽然这些对于机器人来说是完美的技能,它需要做任何事情,从从树上摇摆到在大草原上打猎,也许以后还会发明轮子然后开火。开发这些功能需要数百万年的时间,因此让机器人自主运行可能需要一个多下午的时间,这并不奇怪。
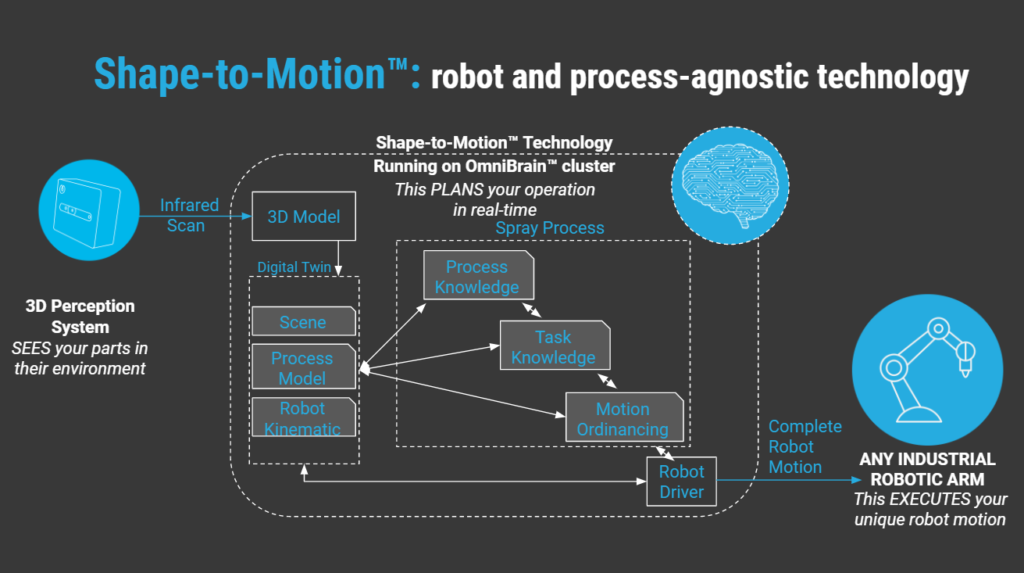
那么,在这种情况下,机器人的答案是什么?好吧,就像人类在做这些动作之前将他们的动作可视化一样,生成自主机器人功能的模拟或数字孪生,并使用它来注入流程模型期望(例如邮箱通常在哪里或看起来像什么)是您可以采取的最大步骤来创建一个有用的自主机器人。
执行计划
一旦你有了一个过程模型、足够的模拟和正确校准的传感机制,执行只是一个观察和优化的问题。如果您正在构建的自主机器人开箱即用符合您的标准,那么甚至不需要这样做。机器人的根本价值在于它们的一致性,现有的现代工业机器人非常可靠。添加感知层和智能层,使它们响应 不同的部分和位置创造了我们都希望探索的全新自主世界
这种自主权的下一步是什么?如上所述,简化应用程序的构建方式,但也增加了传感器、机器人布置、任务、环境等可以执行的范围。愚蠢的是自动化创造了生产力,最终增加了增长、收入和劳动力需求。将自动化视为对劳动力的威胁是真正的威胁 ,同时为更多员工不喜欢的空间带来自动化 将使工作比以往任何时候都更具创造性、创新性和乐趣——如果人们甚至需要工作。 享受!

Omnirobotic 为喷涂工艺提供自主机器人技术,使工业机器人能够查看零件、规划自己的运动程序并执行关键的工业涂层和涂饰工艺。 在这里查看您可以从中获得什么样的回报 ,或详细了解如何从 中受益 自主制造系统 .
工业机器人