

什么是后处理器编辑器,您如何使用它?
您使用的是模拟机器人或 CNC 机器……但它的性能不正确。是时候使用后处理器编辑器了吗?
后处理器的作用是什么?为什么要编辑一个?
如果您使用离线编程,很可能您已经与后处理器进行了交互。也许您正在使用 RoboDK 对机器人进行机器人加工或其他机器人应用程序的编程。或者您正在使用支持您的 CNC 机床的 CAD/CAM 系统。
即使您没有意识到这一点,只要您使用这样的系统对您的物理机器进行编程,您就是在使用后处理器。
后处理器是模拟环境和物理机器之间的桥梁。它将模拟指令转换成机器人可以使用的代码。
但是,如果你想改变 如何 程序生成此代码?这就是后处理器编辑器的用武之地……
为什么需要编辑后处理器?
大多数人永远不需要编辑他们的后处理器。
例如,如果您使用 RoboDK,您只需从我们广泛的机器人库中下载您的机器人模型。我们已经将每个模型链接到 RoboDK 中的 80 多个后处理器之一。每当您将模拟程序发送给物理机器人时,后处理器都会“在后台”为您转换代码。
但是,在某些情况下,您需要编辑后处理器。
每个机器人制造商都使用自己的专有编程语言,该语言在自己的机器人控制器上运行。每个控制器都有一系列不同的配置选项和功能。后处理器是您可以设置所有这些自定义配置选项的地方。

例如,Techman 机器人控制器包含一个安全选项,可在用户重新编程机器人之前询问用户密码。后处理器是您可以找到启用、禁用和设置此密码的选项的地方。不是所有的机器人都有这个选项。
什么是后处理器编辑器?
后处理器编辑器是用于编辑机器人或 CNC 后处理器文件的专用软件。这使得后处理器编辑比使用标准文本编辑器更直观,标准文本编辑器是许多编程系统的唯一选择。
RoboDK 中包含的后处理器编辑器就是此类软件的一个示例。
RoboDK 后处理器是用 Python 编程语言编写的。对于每个受支持的后处理器,都有一个编译库(一个 PYC 文件)和一个包含所有配置属性的可编辑 Python 脚本。
如果您想完全控制配置,可以使用任何标准文本编辑器编辑这些配置文件。但是,RoboDK 还提供了更直观的后处理器编辑器。这使您可以更改所选机器人的参数,而无需完全参与代码。
如何轻松编辑后处理器
在 RoboDK 中,编辑后处理器的最简单方法是使用我们的后处理器编辑器。它提供了有关您何时最有可能使用每个参数和推荐值的信息。使用此工具,您将涵盖机器人的绝大多数用例。
每个后处理器都包含一个配置属性列表。这些会因您的机器人制造商而异。
一些后处理器包含很少的属性。例如,Mecademic 机器人的后处理器只包含一个属性(程序文件的文件类型)。
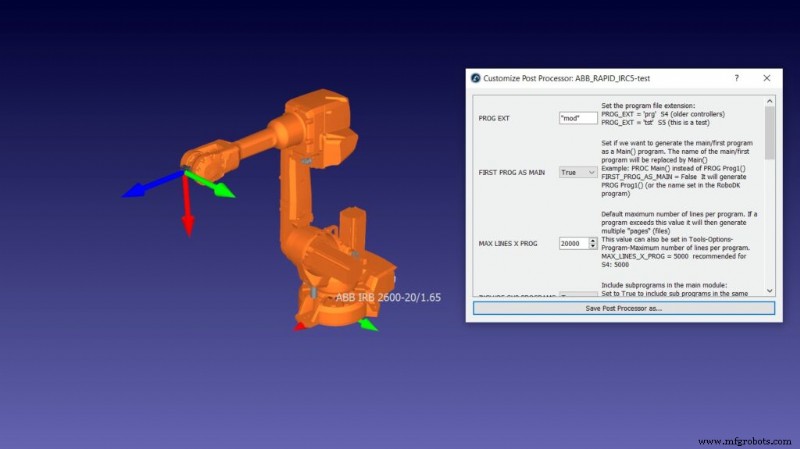
其他后处理器包括许多属性。例如,ABB 机器人的 ABB_RAPID_IRC5 后处理器有 16 个属性,从机器人的默认速度到外部转盘的配置标志。
无论您使用什么机器人,编辑其后处理器的最简单方法是将其加载到 RoboDK 编辑器中。您将能够看到所有可用的配置属性并决定哪些最适合您的应用程序。
简单后处理器编辑指南
当您打开后处理器编辑器时,您会看到一个可用属性列表。
您如何决定调整哪些属性以及设置哪些值?
让我们用一个具体的例子来展示这个过程……我们来看看该公司协作机器人系列的 AUBO 后处理器。
AUBO 后处理器包含以下属性:
- PROG EXT — 这是程序扩展,包含在许多后处理器中。它指定 RoboDK 将生成的文件类型。
- SPEED MS 和 SPEED RAD - 指定圆周运动的速度(以米/秒为单位)和弧度。
- ACCEL MSS 和 ACCEL RADSS - 指定机器人的加速度,单位为米/秒平方或弧度/秒平方(对于圆形加速度)。
正如您所看到的,这些属性通常仅从它们的命名约定就很清楚了。但是,如果属性的用途不是很明显,通常会在编辑器中对其进行描述,并且通常还会提供推荐值。
如果您仍然无法确定特定属性的用途,您可以在您的机器人手册中找到信息,或者您可以在 RoboDK 论坛中提问。
在哪里可以找到新的 RoboDK 后处理器编辑器
开始使用 RoboDK 编辑器编辑机器人的后处理器!
您可以在我们的文档页面上找到有关如何激活和使用编辑器的信息。
有问题吗? 在下面的评论中告诉我们,或加入 LinkedIn、Twitter、Facebook、Instagram 或 RoboDK 论坛上的讨论。此外,查看我们广泛的视频收藏并订阅 RoboDK YouTube 频道
工业机器人