

如何在不发疯的情况下对机器人输送机进行编程
对机器人传送带进行编程比许多人想象的要复杂。良好的模拟是成功的关键,但如何做到不发疯呢?
传送带是一种将产品运送到机器人的简单方法,对吧?
嗯……不是真的。我们通常认为传送带是一种简单的解决方案,但实际上,它们是更复杂的工件输送方法之一。他们要求机器人检测和跟踪在传送带上移动的物体。它们需要通过机器人程序进行控制。它们在其一生中还会遭受各种机械问题,例如跟踪不良、皮带磨损和打滑。所有这些都意味着传送带会让你有些发疯。
它们不仅简单,而且使用起来很棘手。
我们无法解决您的输送机的机械问题——为此,您需要一个良好的维护计划,就像 Cisco-Eagle 的这份方便的清单中所示的那样。但是,我们可以 帮助您轻松模拟传送带,以便您对其进行测试并将其与机器人编程集成。
以下是如何在不发疯的情况下对机器人传送带进行编程。
机器人输送机的 5 个棘手的移动部件
首先,重要的是要了解为什么对传送带进行编程具有挑战性。
有 5 个“运动部件”,很难将机器人编程与传送带集成。
1。输送机本身的控制
它可能看起来像传送带控制只是一个“开/关”的交易,但它通常比这更复杂一些。输送机有多种控制选项,具体取决于型号。有些具有固定速度,而另一些则可以通过可变速度进行控制。有些具有倒车模式、主动制动或快速切换。然后是不同的控制方法,最常见的三种是脉冲控制、速度控制和分布式控制。

您可能必须控制机器人程序本身内部的传送带。如果没有,您可能必须通过网络与传送带连接。这两个选项都增加了编程的复杂性。
2。跟踪和检测物体
为了从移动的传送带上拾取物体,机器人必须能够可靠地定位它们。这意味着您需要某种传感器来检测物体何时到达机器人前面。更重要的是,机器人可能需要某种方式在传送带移动时跟踪物体。
最常见的传感器是视觉传感器(例如 2D 或 3D 相机)和零件检测传感器(例如光束、磁传感器、感应传感器等)。有些比其他的更容易集成,但它们都为您的程序增加了额外的复杂性。
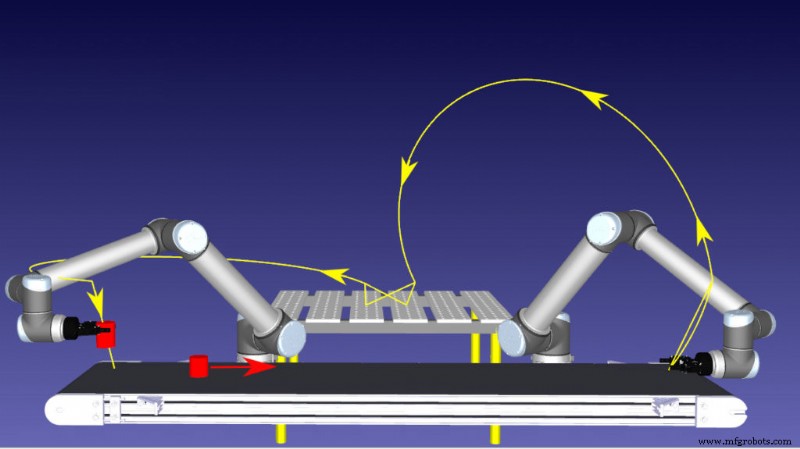
3。处理移动物体
移动目标总是比静态目标更难处理。当从传送带抓取时,这会带来复杂性。机器人必须能够移动到位,牢牢抓住物体,并在新物体不断到达时离开。
传送带的速度必须精确地调整到机器人的速度,否则可能会错过物体。如果您看过 1950 年代喜剧《我爱露西》中著名的“巧克力场景”,您就会明白我的意思(如果您还没有看过,这里就是)。
4。末端执行器选择
机器人手臂并不是系统中唯一需要跟上速度的部分。末端执行器会对循环时间产生重大影响,从而影响输送机的速度。某些类型的末端执行器比其他类型的末端执行器更快。
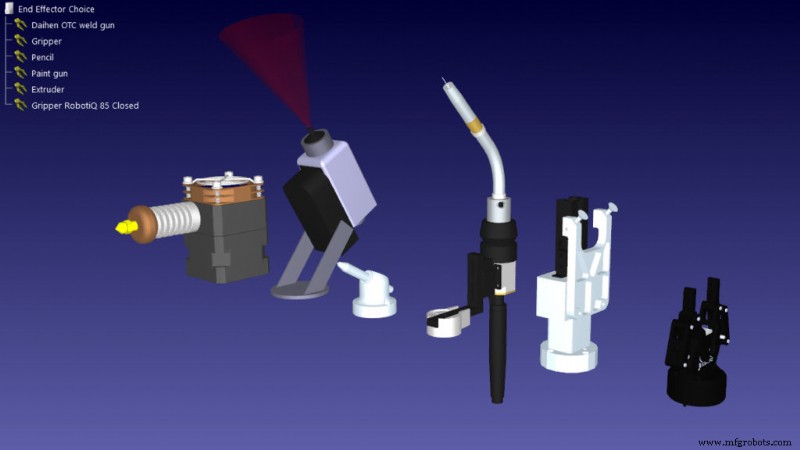
这意味着我们现在必须同时控制和协调 3 个独立的速度:传送带速度、机械臂速度和末端执行器抓取速度。
5。夹具的使用
最后的活动部分实际上根本不是活动部分。固定装置是固定在传送带上以将物体移动到位的静态机械部件。它们是在不使用传感器的情况下对传送带上的物品进行排序的可靠方法。
例如,您可以使用固定装置来替代使用视觉传感器。使用特殊成型的金属板,您可以将物体汇集到静态队列中,让机器人在没有额外传感器的情况下拾取它们。它们使编程更简单,但它们增加了机械设计的复杂性。
如何使用 RoboDK 模拟传送带
您可以通过模拟您的机器人系统并在使用物理系统之前对其进行彻底测试来克服上述五个挑战。对于机器人模拟器来说,这并不总是那么容易,其中许多都没有添加传送带的简单功能。
幸运的是,传送带在 RoboDK 中非常简单。甚至有两个选项可以添加它们,具体取决于您需要多少控制。
RoboDK中的两种传送带是:
选项 1:Python 编程
在 RoboDK 中创建传送带最灵活的方法是用 Python 对其进行编程。您可以在示例视频 Conveyor Simulation with RoboDK 中看到这一点。
python编程的优点是:
- 非常灵活。 传送带的运动仅受您的编程技能限制。您可以对模拟传送带进行编程,以匹配真实传送带的特性。
- 它是完全可定制的。 您可以对传送带进行编程,使其以您想要的任何方式移动。您可以完全控制它的移动以及它处理对象的方式。
- 它允许更复杂的传送带。 如果您的传送带具有高级控制模式,这些可以包含在 python 代码中。此外,例如,如果您放置了一个固定装置以将物体移动到皮带的一侧,则可以将其编程到代码中。
python编程的缺点是:
- 需要编程技巧 .你必须能够用python编程。这是最容易学习的语言之一,但如果您到目前为止只使用过 RoboDK 的图形界面,它仍然需要一个学习曲线。
- 需要更长的时间 .与线性机制选项相比,python 编程确实需要时间。此外,传送带越复杂,编程所需的时间就越长。
选项 2:线性机构
另一种选择是使用“模型机制”向导创建线性机制。这使您可以创建具有单个线性轴的简单传送带。
直线机构的优点是:
- 很快。 您可以在几分钟内创建一个线性机构,并非常快速地将传送带添加到您的机器人仿真中。
- 它使用图形向导。 您可以使用向导创建机制,仅使用参考框架和目标。
- 几乎不需要编程。 您无需进行任何 Python 编程即可创建传送带。但是请注意,您可能需要进行一些编程才能检测传送带上的物体。
直线机构的缺点是:
- 数量有限。 该机构的简单性质意味着您只能对单轴输送机进行建模。
- 不灵活。 此选项使您难以对输送机的更高级控制选项进行建模。当物体从传送带上掉下来时,它也很难检测到。
如何开始
你选择哪个选项很大程度上取决于你想避免python编程的程度。除非您有充分的理由选择线性机制,否则我们通常建议选择 python 选项。它更加灵活——我认为(尽管我是一名程序员)——更容易理解和实现。
无论您选择哪个选项,您都不必从头开始创建传送带模拟。
我们的机器人库中提供了两种可供下载的选项。只需从“类型”菜单中选择“对象”,您将看到两个选项:“模型 Python”用于 python 选项;和线性机构选项的“模型机构”。
如果您遇到困难,您可以随时在 RoboDK 论坛发表评论,我们会尽力帮助您。
工业机器人