

树莓派机器人:如何构建树莓派机器人
树莓派
您是否发现构建 Raspberry Pi 机器人既棘手又复杂?那么你来对地方了。
事实上,为您的机器人使用 Pi 板会以可承受的价格为您提供一台完整的计算机。因此,当您将其与小巧的外形和广泛的社区支持相结合时,即使对于初学者来说,它也将是一个很棒的板子。
然而,潜入机器人世界意味着潜入更先进的电路设计。但别担心,我们会尽可能地简化它。 https://www.wellpcb.com/
因此,在本文中,我们将介绍如何构建 Raspberry Pi 机器人以及您可以制作的不同 Pi 机器人项目。
如何构建树莓派机器人
在这里,我们将向您展示如何构建一个适合初学者的 Pi 机器人,它可以避开障碍物并自由导航。以下是此项目所需的部件:
- Raspberry Pi(B、B+ 或 2 种型号)
- 齿轮直流电机 (1)
- 脚轮 (1)
- SD 卡 (1)
- 鼠标 (1)
- 按钮 (1)
- 鼠标 (1)
- 200R电阻(1个)
- 面包板 (1)
- 双面胶带 (1)
- 键盘
- L293D 驱动程序 (1)
- 男对男或女对女跳线 (1)
- 机器人底盘和轮子 (1)
- 红外传感器模块 (1)
构建项目
首先,我们必须将 IR 传感器连接到 Raspberry Pi。因此,要做到这一点,请在将 Raspberry Pi 连接到键盘、鼠标和显示器后戴上它。接下来,单击您的传感器并确保其正常工作。
之后,将 Pi 的 5V 引脚和 GND 引脚连接到传感器以供电源。接下来,将传感器的B管脚点到GPIO管脚16和3。最后,检查GPIO.BOARD的管脚配置。
接下来输入如下代码,保存为Python文件,最好是irtest.py。
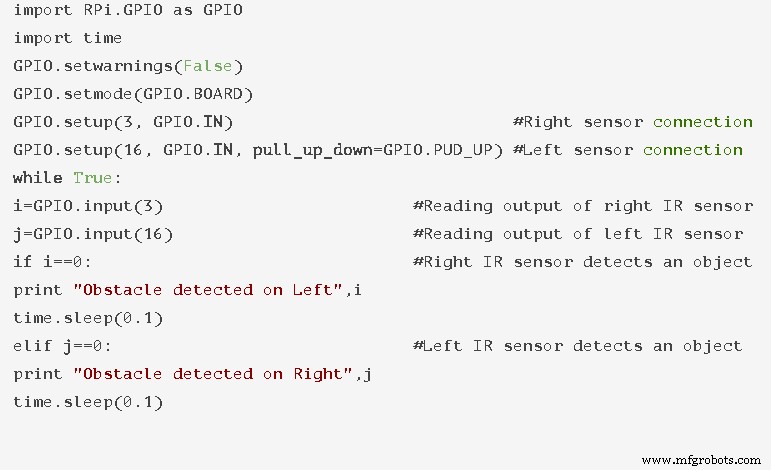
Python 文件代码
保存并运行 python 文件后,当您阻塞传感器时,您会注意到以下输出打印:
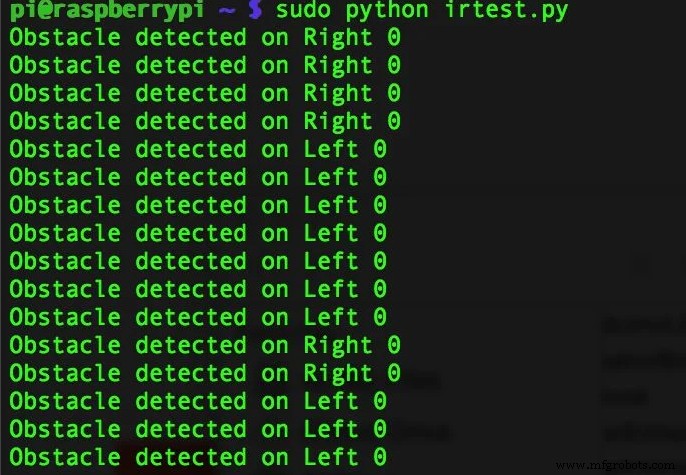
Python 文件的输出打印
因此,请尝试检查您的连接或更换您的组件,如果它不起作用。
将您的电机与 L293D 连接
现在,我们将使用 L293D 模块来连接电机。但是,首先,通过 + 和 - 引脚为 L293D 供电。然后,还将这些电源引脚连接到 9v 电池板上。
全电路连接
此外,将 L293D 的 - 引脚连接到 Pi 的 GND 引脚。请查看下图以清楚地了解连接。
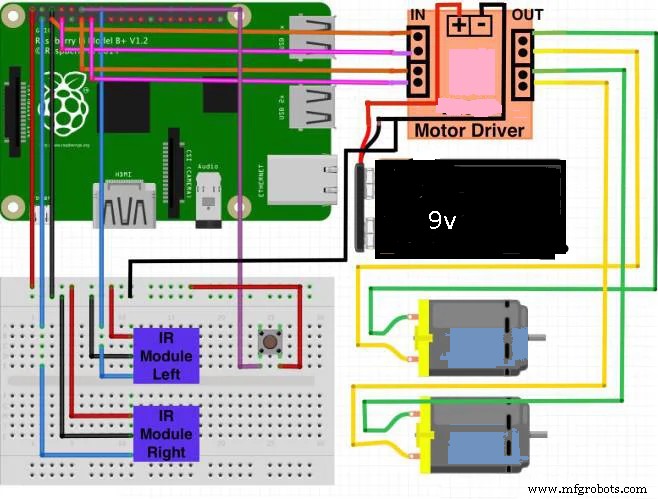
此外,使用四个输出 GPIO 引脚为电路板创建输入。另外,您可以使用这些输出引脚来控制两个电机的旋转方向。
此外,您可以将两个电机端子连接到电路板的四个输出端子。最后,为您的最后一次连接附加一个用于激活或停用机器人的按钮。
最终建设
现在,您可以为电机添加轮子并将连接器组装到机器人底盘上。确保用双面胶带固定部件,以免脱落。
不要忘记使用下面的代码测试您的电机。另外,确保将代码保存为 python 文件:moto.py。然后使用 sudo motor.py 命令运行代码。如果它工作,你的电机应该开始旋转。
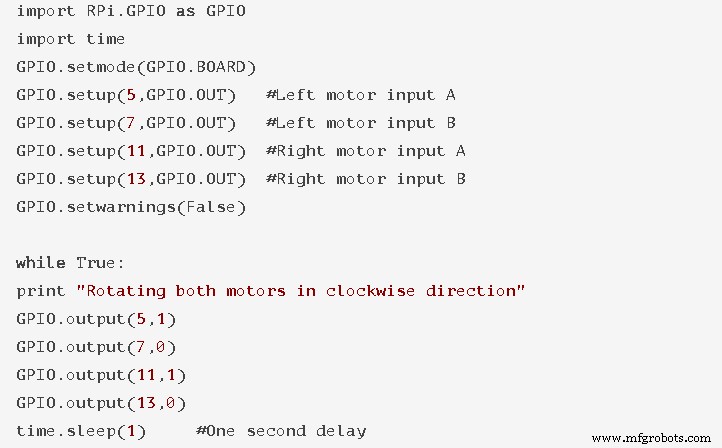
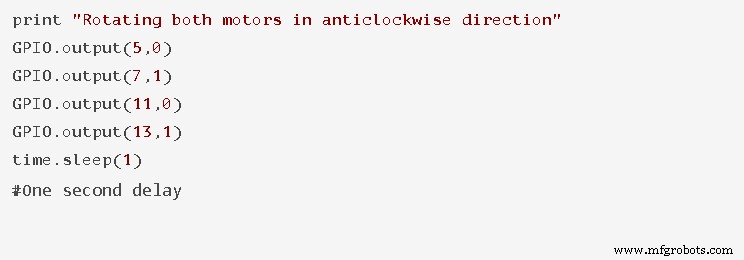
电机测试代码
工作原理
当您按下按钮时,机器人将激活并开始移动。向前移动时,机器人将使用 IR 传感器搜索阻挡其路径的任何物体。一旦检测到障碍物,Pi 将允许机器人绕过障碍物进行机动。同样,您可以通过按下按钮来停用机器人。
Raspberry Pi 机器人项目
所以,如果你已经完成了上面的简单项目,并且正在寻找更多的挑战,这里有一些很棒的项目想法可以尝试。
1. CHOP 四足机器人

砍四足机器人
事实上,斩波四足机器人是一个类似于波士顿动力现场的 DIY 项目。此外,CHOP 项目是开源的。因此,您可以使用一些 3D 打印部件和其他材料对其进行自定义和调整。
毫无疑问,Raspberry Pi 4B 和 Arduino Mega 是这款机器人的重要组成部分。此外,Arduino 过滤来自传感器的数据并连接到伺服控制器。另一方面,Pi 收集所有数据并运行各种 Python 脚本来控制机器人的运动。
此外,Pi 使用逆运动学模型来控制舵机的移动方式。最后,您可以使用蓝牙控制器来控制机器人的方向。
2。乒乓机器人
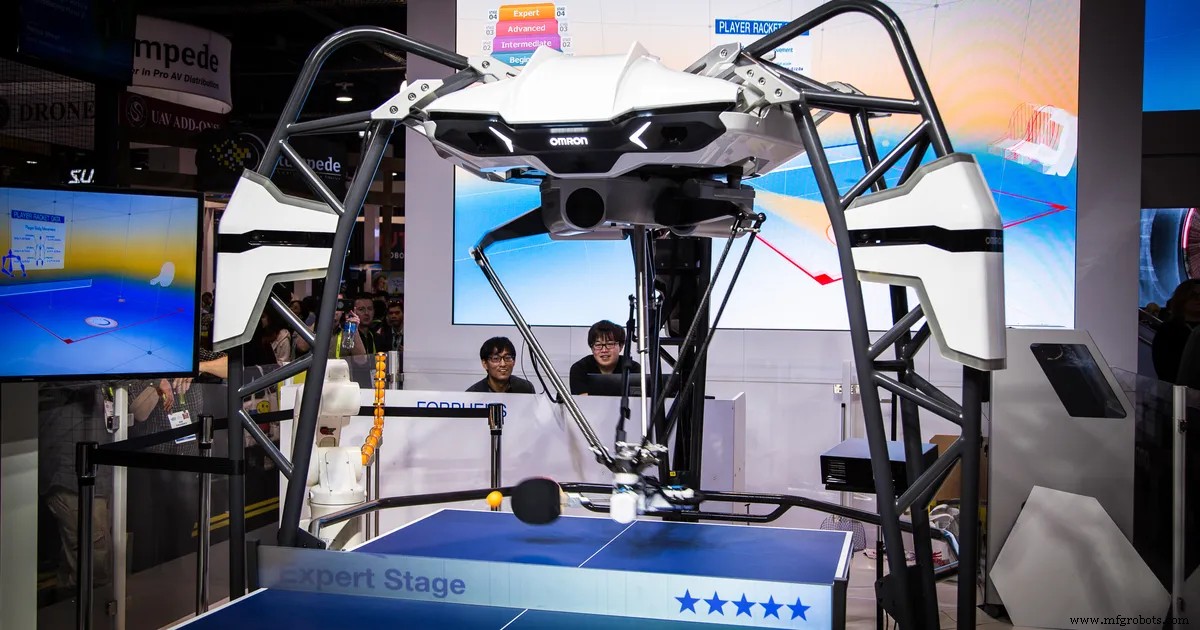
乒乓机器人
乒乓机器人能够和人类一起打乒乓球。并且在不同的层次上,从高级到简单。
您将乒乓球机器人用于休闲游戏或严格练习。但是,您可以花大约 2000 美元购买商业版本。或者,使用您已有的部件、3D 打印和激光切割部件轻松制作 DIY 版本。
此外,您可以通过 WiFi 连接到机器人并完全控制。
3.树莓派人形机器人

人形机器人
您可以使用 Raspberry Pi 构建您的类人机器人。部分仿人机器人具有避障、超声波距离感应或无线控制等功能。
无论功能如何,您都需要一个 Robotics Bioloid 套件、陀螺仪和距离传感器来完成此项目。
此外,我们建议使用较小的 Raspberry Pi Zero 和单节 2500 Mah 电池作为电源。
此外,您还需要一个模数转换器芯片,以便从传感器读取数据。
4. Pi Roomba

房间
如果您在机器人技术方面经验丰富,那么您可能听说过 Roomba 机器人吸尘器。
但是,您可以使用 Raspberry Pi 和更智能的动作来构建自己的。
您需要一个 Roomba 530 串行接口,以便连接到您的 Raspberry Pi。
此外,您将使用 Javascript 包进行编码。该盒子还使用 RxTX 与机器人通信。
此外,您可以使用操纵杆控制 Roomba,甚至可以设置您的电平输出。
5.黄油机器人
智能黄油机器人可以录制和流式传输高质量的视频。另外,它还可以录制和输出音频。
最好的部分是您只需要一个 Raspberry Pi 摄像头模块和一个 USB 设备即可捕获这些声音和视频。
但是,机器人的组件包括:
- 树莓派零 W
- RPi 摄像头模块
- 直流电机
- USB 音频板
- L9110电机驱动器
- 领导
- 电池组
- 9g 舵机
- 滑动开关
- 演讲者
此外,您还可以通过支持视频流的 Blynk 应用程序使用此机器人。
6. Petoi 机器猫
您可以使用 Nybble 开源机械猫项目构建一只可爱的机器猫。此外,您可以使用激光切割的木制部件代替 3D 打印部件。
该项目的其他组件包括 Raspberry Pi 3B+、Nybble 套件和 Sparkfun Arduino Pro Mini。
此外,您可以使用与 Arduino 兼容的微控制器来控制该机器人的运动。机器猫还可以储存肌肉记忆,让它记住如何移动。
此外,本项目中的树莓派允许您调整 Nybble 代码并给出简单的命令。
7.现货微
Spot micro 是流行的 Spot 四人机器人的缩小版。此外,您还可以通过三轴“角度指令控制模式”获得小跑步态和步行步态。
该机器人在带有 Ubuntu 的 Raspberry Pi 3B 上运行。此外,它使用 C++ 和 Python 框架。
此外,您需要以下组件来尝试此项目:
- 树莓派 3 B
- 15×2 液晶面板
- PCA9685伺服板
- 4000 毫安时电池
- 5v稳压器
- 3D 打印部件
- Lider(房间映射可选)
8.微型格斗机器人
你想打造一个强大的格斗机器人吗?然后你可以试试这个项目。使用 Raspberry Pi Zero,您可以将蓝牙控制器的输入转换为机器人电机控制器的命令。
该项目没有使用 RC 发射器,而是使用了更简单的 GPIO 引脚配置。
如果您有一个用于运动的 L298N 板、一个用于旋转无刷电机的 Tarot TL300G ESC 和一个 500Mah 电池组,那将会有所帮助。并且您在 3D 打印底盘上拥有一个迷你格斗机器人。
9.树莓派毁灭者机器人

毁灭者机器人
顾名思义,您可以使用 Raspberry Pi Zero W 构建机器人坦克。整个构建包括一个 3D 打印的自定义支架、一些 python 代码和一个电机控制器电路。您还可以添加已安装的摄像头。
或者,您可以在 Devastator Tank 移动平台上找到该项目所需的一切。
结束语
Raspberry Pi 是一款多功能微型计算机,适用于各种应用程序。我们在本文中列出的大多数 Raspberry Pi 机器人项目仅使用对初学者友好的 Python。
此外,如果您找不到项目所需的所有组件,您可以尝试使用机器人套件。购买自动化设备将为您的机器人项目提供现成的详细信息。
但是,您需要具备基本或中级技能才能尝试任何这些项目。
你有任何问题吗?请随时与我们联系,我们很乐意为您提供帮助。
工业技术