

11 个最有用的机器人编程基础知识
当您开始进行机器人编程时,了解哪些基本属性最有用?
无论您是机器人世界的新手,还是只是想提高编程技能,以下都是值得了解的顶级机器人编程基础知识。
有时你会觉得你需要机器人学学位才能开始机器人编程。对于新的机器人程序员来说,工业机器人编程的传统方法看起来很难掌握。
但是,有了良好的机器人基础知识和良好的机器人编程软件,您就可以轻松快速地上手。
以下是 11 个最有用的机器人编程基础知识:
1.机器人的基本部件
在开始学习如何对机器人进行编程之前,了解任何工业机器人的基本部件会很有帮助。这样,您至少对要编程的物理机器感到满意。
比如一个6自由度工业机器人最基本的部分是:
- 机械手的手臂
- 末端执行器
- 控制器
- 电源
- 传感器(如果有)
组件会根据机器人的类型而略有不同。
2.自由度
我已经介绍了机器人技术中的一个重要概念:自由度(DoF)。
机器人的自由度指定机器人可以移动多少个独立轴。例如,一个 6 DoF 机械臂将有 6 个独立可控的轴。一些自由度是“旋转的”(即它们围绕一个点旋转),一些是“线性的”(即它们沿着一条线移动)。在编程之前熟悉任何机器人的自由度是有帮助的。
3.关节和末端执行器
机器人的“业务端”(即执行任务的部分)被称为“末端执行器”。在编程时,您通常最感兴趣的是将机器人的末端执行器引导到特定位置。
要移动机器人,您需要发送带有每个机器人自由度所需位置的指令。如果您使用的是 RoboDK 等软件,则可以直接编程所需的末端执行器位置,而不是发送特定的关节位置。
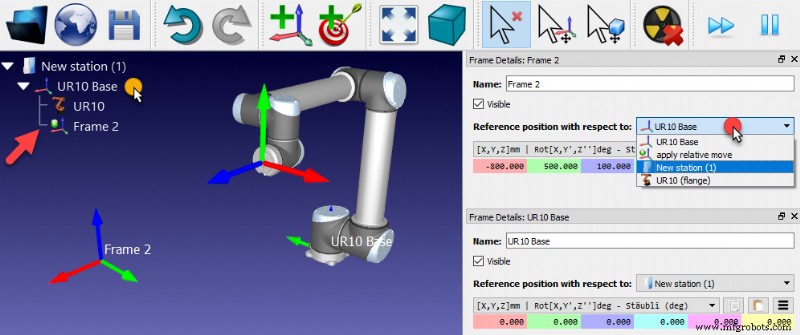
4.姿势:位置和方向
你如何对末端执行器进行编程以告诉它去哪里?
机器人末端执行器(或您编程的任何其他位置)的位置和方向组合起来形成“姿势”。您需要指定机器人将在您的程序中移动到的任何位置的位姿。在编程中指定位姿最常用的方法是通过欧拉角。
有关更多信息,请参阅我们的文章 Robot Euler Angles:The Essential Primer。
5.工具中心点 (TCP)
由于我们在编写机器人程序时最感兴趣的是末端执行器的位姿,所以我们经常使用“工具中心点”一词来指代工具的操作中心。
以下是不同末端执行器的一些示例:
- 胶枪—— 您可以将 TCP 设置在枪尖。
- 抓手—— TCP 可能位于夹具手指的中心。
- 焊枪—— TCP 可能距离枪尖几毫米,那里的火焰最热。
作为程序员,您选择最适合放置机器人 TCP 的位置。
6.运动学
机器人技术更具挑战性的方面之一是运动学。这仅仅意味着机器人的几何排列。运动学被表示为一个相当大的方程或算法。
正向运动方程回答了这个问题“如果我将机器人的关节设置到特定位置,TCP 会在哪里结束?”
逆运动学算法回答了相反的问题“如果我希望 TCP 以这个姿势结束,我需要将关节设置到什么位置?”
使用好的机器人编程软件,您可能不需要制定自己的运动学,但了解基本概念会有所帮助。
7.联合限制
运动学方程使用纯几何和数学描述机器人。然而,机器人是物理机器。物理机器人通常无法到达几何结构所说的每个位置。
我们在编程中引入关节限制,以将机器人关节的运动限制在物理上可能的位置。他们只是告诉程序“这个关节不能超过这个特定的角度。”
8.移动类型
当您对机器人进行编程时,您可以让机器人做出不同类型的运动。
基本的3个动作是:
- 联合移动—— 这是一个快速、粗暴的运动,每个关节都试图尽快到达其目标位置。为避免碰撞,仅应在机器人在自由空间中移动时对关节移动进行编程。
- 线性移动—— 这是沿着两个姿势之间的一条线的受控运动。机器人在线性移动时必然会移动得更慢,但也不会引入任何无益的碰撞。
- 循环移动—— 与直线运动一样,机器人沿受控线移动,这次是沿着圆形路径。
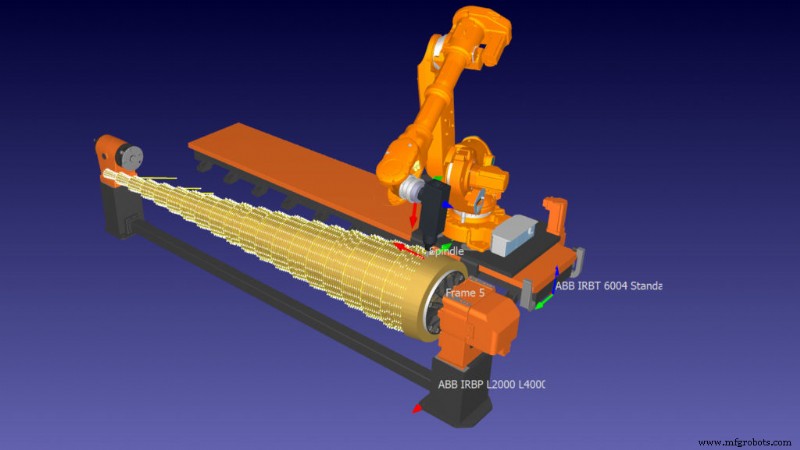
9.仿真和离线编程
对机器人进行编程有很多不同的方法,包括使用机器人制造商提供的(通常很复杂的)编程语言“弄脏你的手”。
模拟和离线编程提供了一种更简单的编程方法。您无需直接对物理机器人进行编程,而是使用直观的命令对机器人的模拟模型进行编程。然后软件将程序转换成物理机器人可以理解的代码。
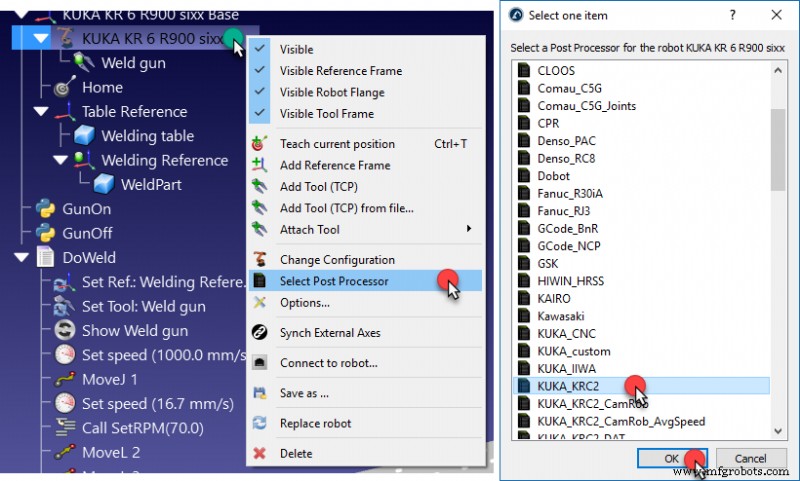
10.后处理器
离线编程软件中转换机器人程序的部分称为后处理器。每个机器人制造商的编程软件都会有不同的后处理器,有时不止一个。
您可以在我们的文章机器人后处理器:您需要知道的一切中找到有关后处理器的更多信息。
11.调试
无论您使用哪种编程方法,一个重要的基本技能是调试。在将机器人设置为在生产环境中运行之前,您应该始终调试您的程序以确保它按照您的预期工作。
离线编程为您提供了额外的调试步骤,因为您在将程序下载到物理机器人本身之前对机器人的模拟模型进行了编程,从而减少了出错的可能性。
如果您想立即开始机器人编程,可以在此处下载 RoboDK 免费试用版。
您需要机器人编程的哪些基本方面的帮助? 在下面的评论中告诉我们,或加入 LinkedIn、Twitter、Facebook、Instagram 或 RoboDK 论坛上的讨论。
工业机器人