

自动驾驶汽车 (AV) 测试:模拟、封闭路线和公共道路
在自动驾驶汽车上路之前,需要对尽可能多的场景进行测试。
- 模拟软件和基于模型的开发工具可以创建虚拟的“试驾”环境。
- HIL 或“硬件在环”测试将控制器的真实信号连接到模拟现实的测试系统。例如,像发动机 ECU 这样的控制器实际上可以被欺骗“认为”它在成品车中。借助 HIL,制造商可以将车辆组件置于一系列可能的场景中,而无需实际驾驶成本。
- 然后,当然,还有驾驶汽车进行真正的旋转 - 无论是在开放的道路上还是在封闭的路线上。
在现场技术简介中 题为“自动化车辆测试和仿真的标准化”的演讲,一位读者向两位行业专家提出了以下问题。
"对于 AV 测试,模拟、封闭路线和公共道路测试各自的作用是什么? "
阅读以下来自自动化测试制造商 National Instruments 的交通研究与设计总监 Jamie Smith 和咨询公司 Exponent 的管理工程师 Jeffrey Wishart 的编辑回复。
杰米史密斯,NI :最大的转变是接受模拟。多年来,我们一直在控制设计中使用仿真,并且我们开始意识到,我们要应对行业面临的挑战的唯一方法是结合 HIL 测试、道路测试和仿真测试。这对我们的理念以及我们进行投资的领域来说是一个重大转变。
Jeff 和 Jamie 的另一个读者问题
一位读者问,“公众准备好迎接 4 级自动驾驶汽车了吗?”
Jeffrey Wishart,指数 :我认为 Jamie 的百分比主要是模拟,有些是封闭的,有些是在路上的,这是正确的,并且该行业似乎正在发展。
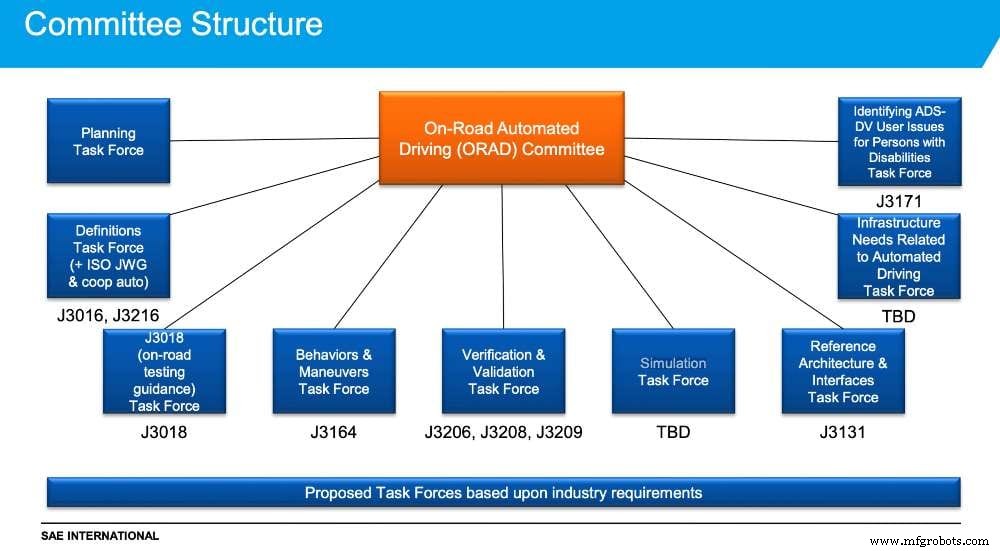
我认为模拟的保真度是一个关键组成部分,我们需要了解模拟与现实世界的接近程度,才能了解它的价值。如果你做了一百万个场景和测试,但保真度很低,那有什么价值? SAE 有一个道路自动驾驶 (ORAD) 工作组目前正在开展这项工作。
封闭式课程非常有价值,因为您可以验证您的模拟或模拟测试的子集。但是很贵,也很费时间。
公共道路测试非常有用,因为您会遇到以前可能没有见过或没有想到的场景,但这也需要很多时间,而且您进行了很多并非那么有用的驾驶。大多数时候它可能看起来很无聊,只有一小部分[驾驶场景]有趣。而且公共道路测试的成本也很高。
他们每个人都有自己的角色。每个人都会做这三个,但这是了解每个人的局限性和优势的问题。
您如何看待车辆测试选项?在下方分享您的问题和意见。
传感器