

DIY 火星恒心漫游者复制品 - 基于 Arduino 的项目
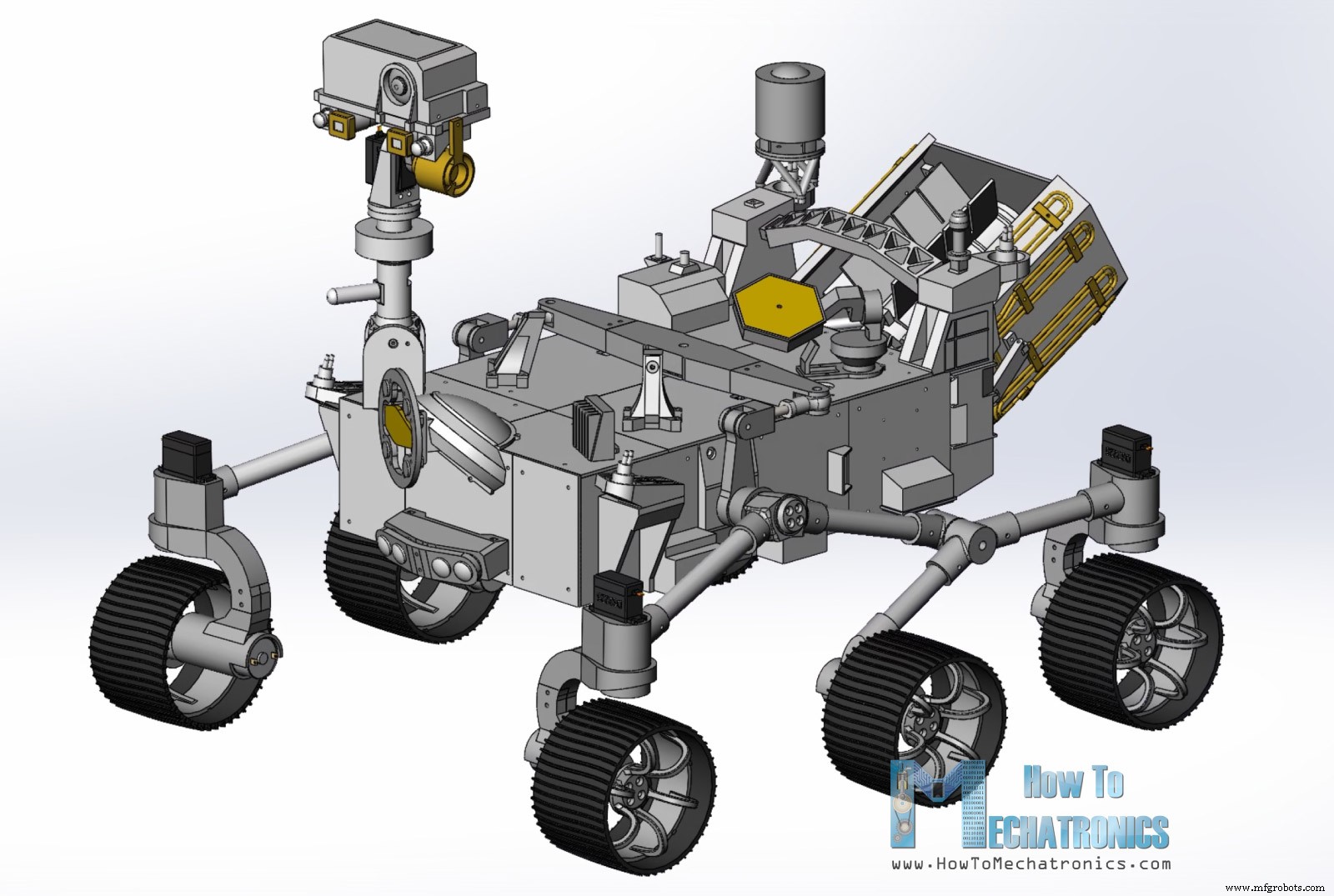
在本教程中,我将向您展示我如何构建火星恒心漫游者的复制品。当然,受到目前正在探索火星的真实漫游车的启发,我设计了这款漫游车,让热爱这项技术的每个人、学生、制造商、机电一体化或机器人爱好者等都可以轻松按照视频中的说明进行操作,并建造自己的火星探测器。
您可以观看以下视频或阅读下面的书面教程。
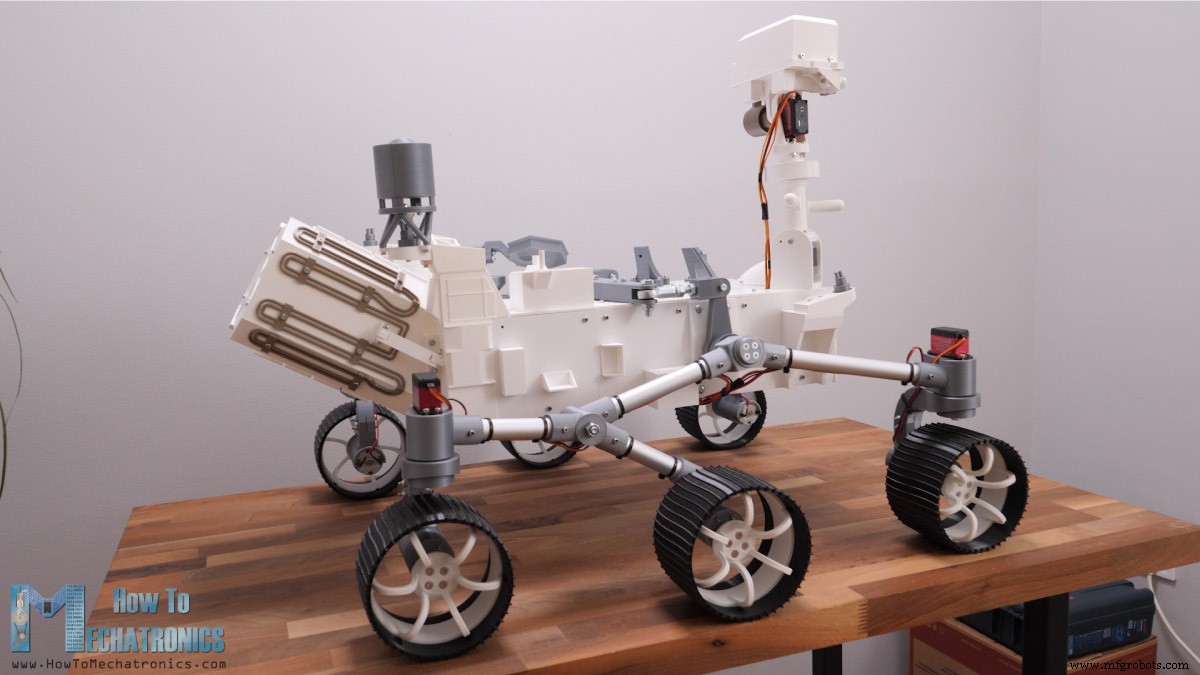
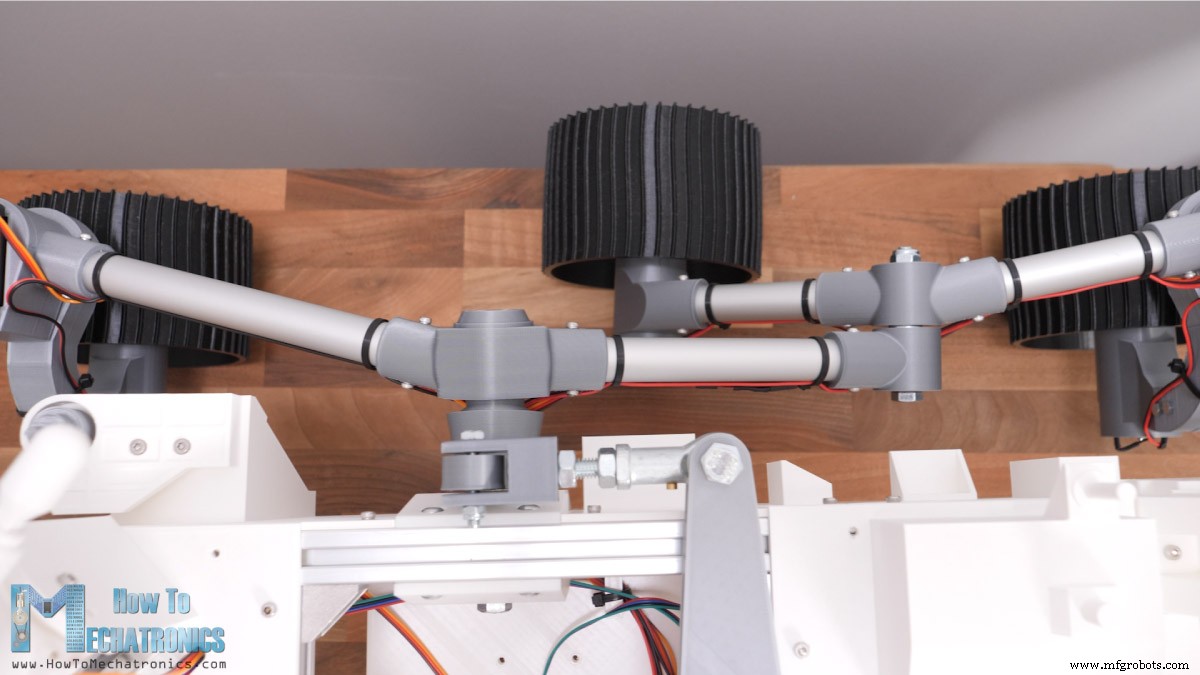
让我们来看看这款流动站的主要特点。它采用了摇臂转向架悬架,使漫游车能够在不平坦的地形上平稳运行,并可以攀爬最大为车轮直径两倍的障碍物,例如岩石,同时保持所有六个车轮始终与地面接触。每个车轮都有独立的直流电机驱动漫游车前进或后退。
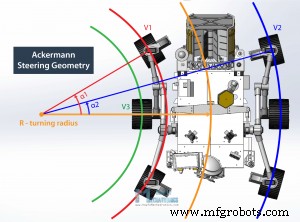
四个角轮具有单独的转向伺服电机。为了有效地引导流动站并避免在弯道行驶时轮胎打滑,我们正在实施 Ackermann 转向几何。有了这个几何形状,我们可以根据转弯半径计算每个车轮的速度和角度。
这意味着,在转弯时,内侧方向盘将比外侧车轮具有更大的角度。同时,与外轮相比,内轮的速度会更慢。
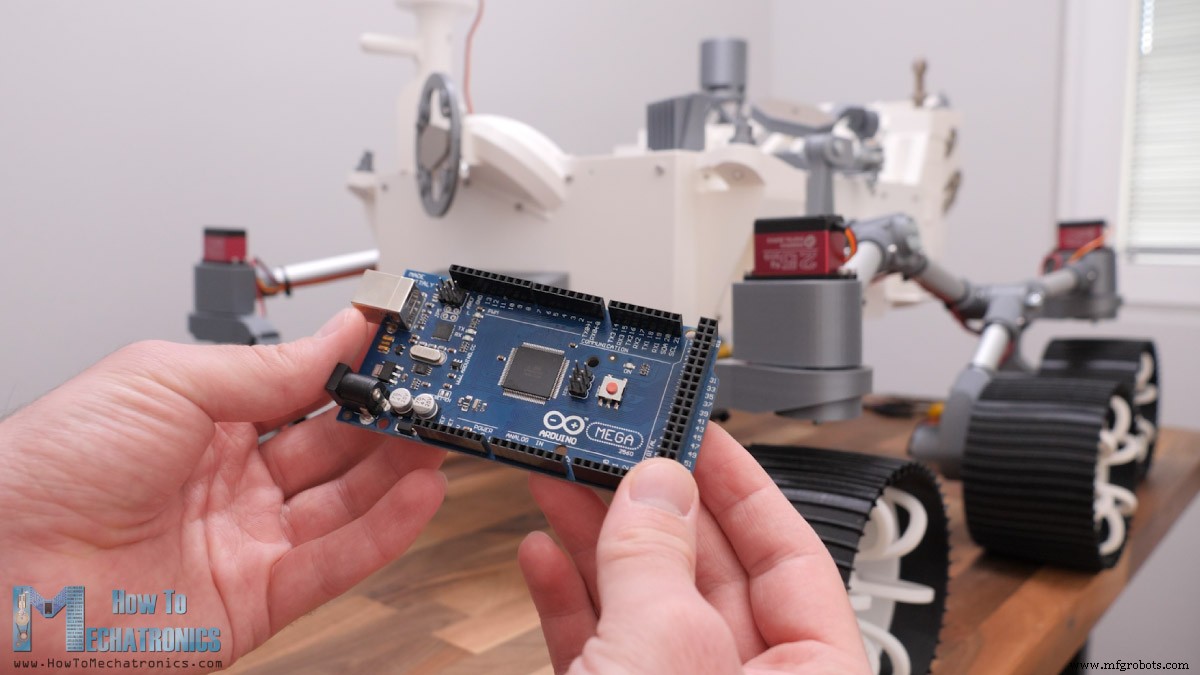
为了控制流动站,我使用了一个廉价的商用 RC 发射器,它向流动站发送命令。在流动站,我有合适的 RC 接收器,它接收命令并将它们发送到 Arduino 板。是的,这辆火星探测器的大脑实际上是一块 Arduino MEGA 板,为了轻松将所有东西连接在一起,我制作了一个定制的 PCB,可以简单地连接到 Arduino MEGA 板的顶部。
流动站还配备了一个位于相机单元中的 FPV 相机。它使用步进器和伺服电机控制,我正在智能手机上接收实时视频。
我想在这里指出,许多部件实际上没有功能,或者它们的存在只是为了与真实漫游车的外观相匹配。另外,机械臂不见了,但我计划在以后的视频中制作机械臂并为该漫游车添加更多功能。
尽管如此,现在让我带您完成构建它的过程,从设计流动站开始,连接电子元件和对 Arduino 板进行编程。
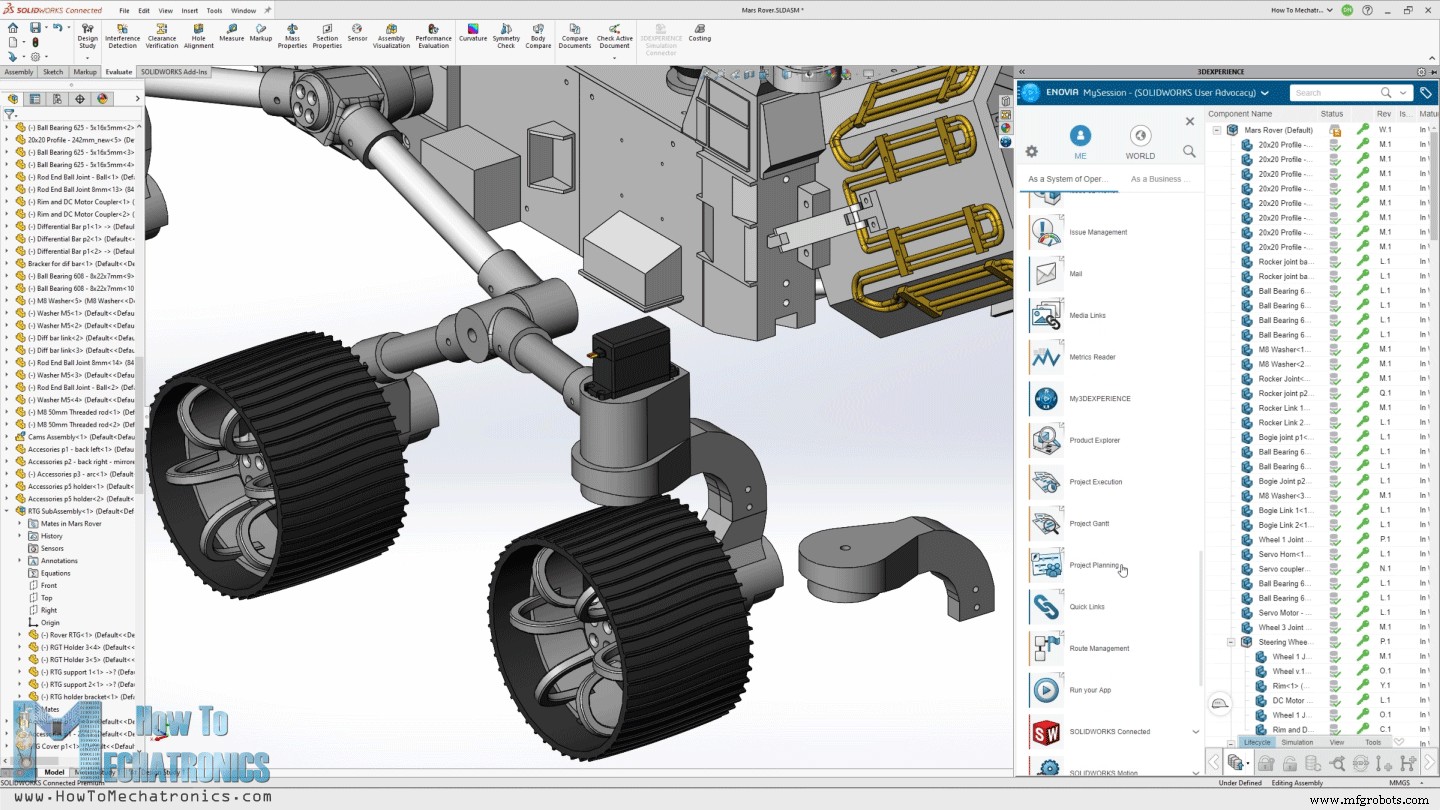
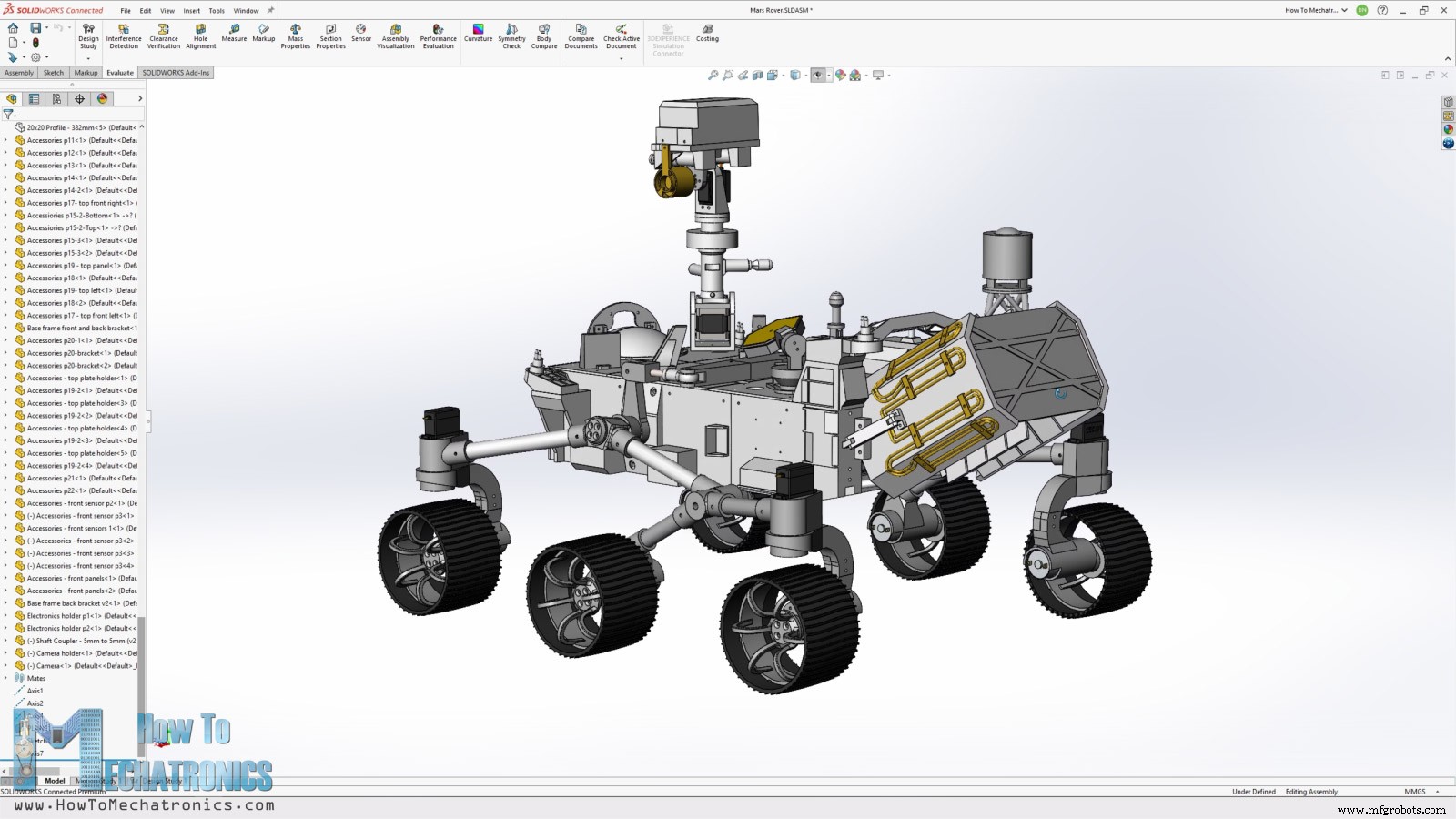
我使用 3D EXPERIENCE Solidworks 设计了这辆火星探测器,这实际上是该视频的赞助商。
3DEXPERIECE Solidworks 是我们通过 3DEXPERIECE 平台获得的具有云功能的 Solidworks 版本。在这里,一切都通过云进行,因此您或您团队中的任何人都可以随时随地访问数据或模型。 3DEXPERIECE 平台还包括许多有用的生产力和数据管理应用程序。
例如,项目计划应用程序是组织任务、设置截止日期和跟踪进度的好方法。使用 3D Markup 应用程序,您可以从任何设备(如笔记本电脑、平板电脑甚至智能手机)查看、探索和记录模型。
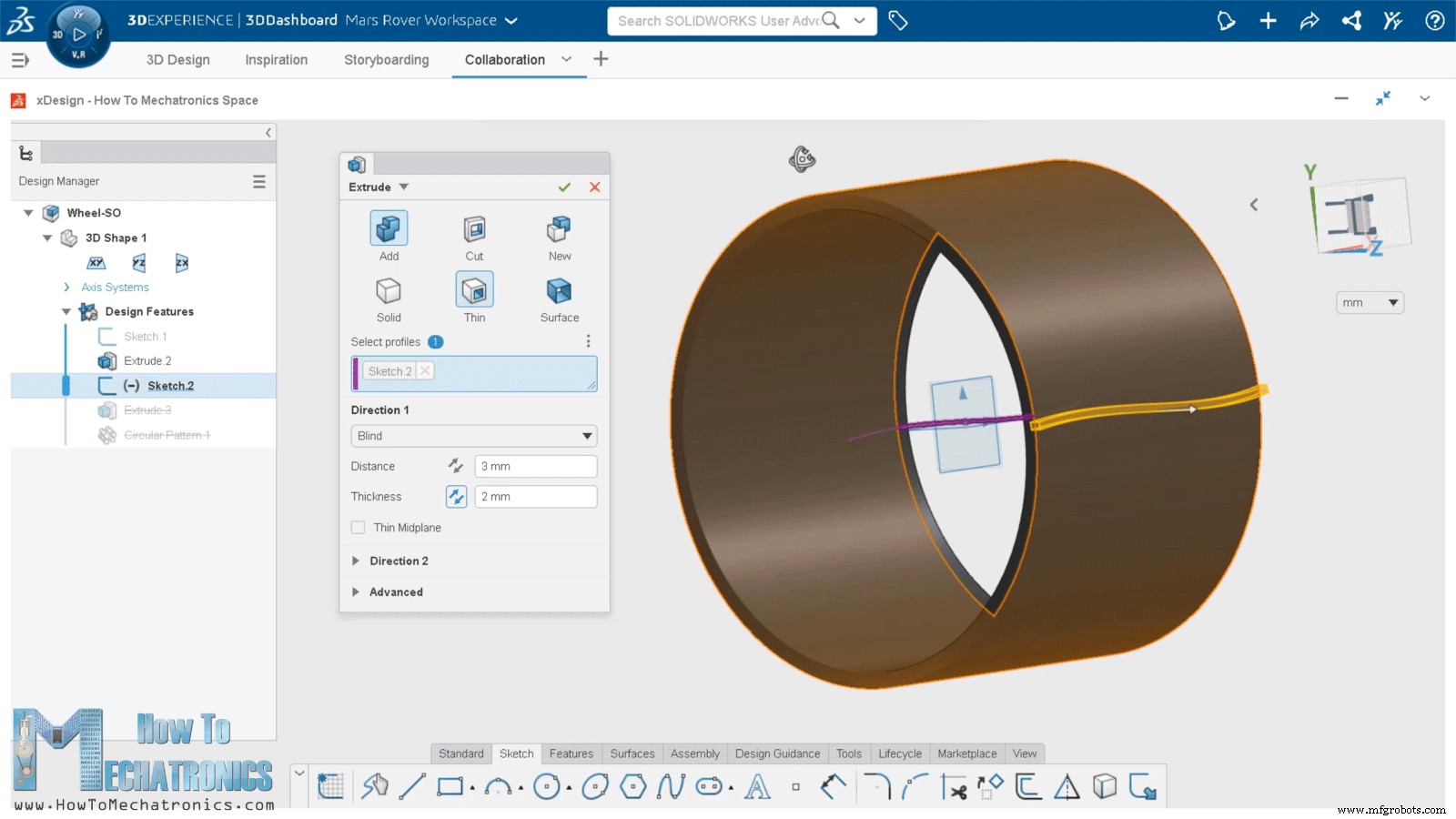
还有一个单独的、基于云的 3D 建模器,称为 SOLIDWORKS xDesign,它在您的浏览器中运行。它可以与 Solidworks 结合使用,也可以单独使用,非常适合随时随地在任何设备上进行建模。
尽管如此,对你们中的许多人来说,最令人兴奋的消息可能是从今年下半年开始,将有一个 3DEXPERIECE Solidworks 的制造商版本,您每年只需 99 美元即可获得。非常感谢 Solidworks 赞助这样的教育内容。
如果您想知道 SOLIDWORKS 和 3DEXPERIENCE 平台是否适合您,请查看以下链接。
通过我的特殊链接免费试用 3DEXPERIENCE:www.solidworks.com/HTMTryNow
了解有关 3DEXPERIENCE SOLIDWORKS 的更多信息:www.solidworks.com/HTMLearnMore
面向创客的 3DEXPERIENCE SOLIDWORKS:www.solidworks.com/htm
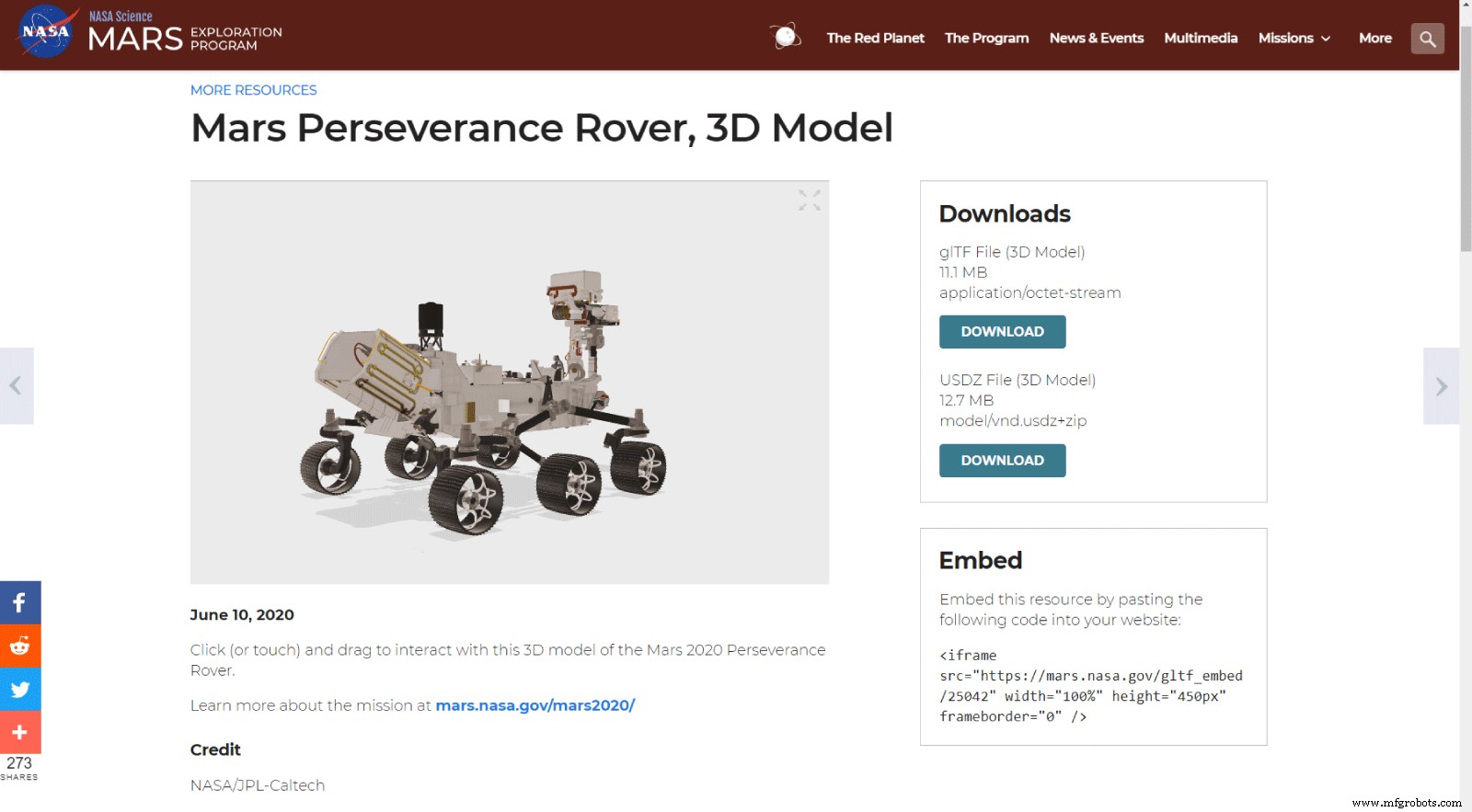
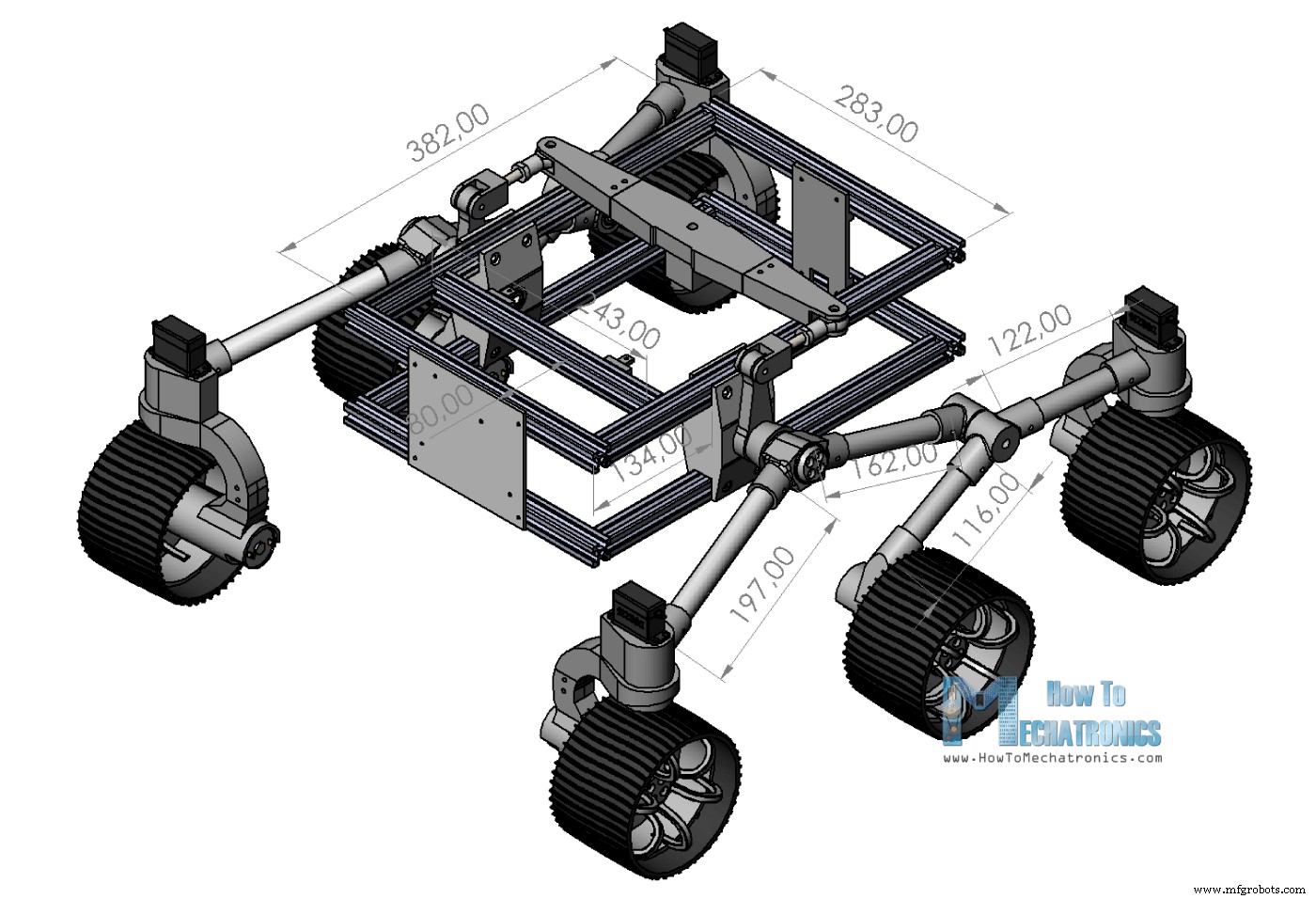
好的,让我们回到模型并解释我是如何设计流动站的。我的目标是让这辆漫游车看起来尽可能接近真正的火星恒心漫游车。在 NASA 官方网站上有一个火星恒心漫游者的 3D 模型,所以我下载并在 Blender 中打开它。
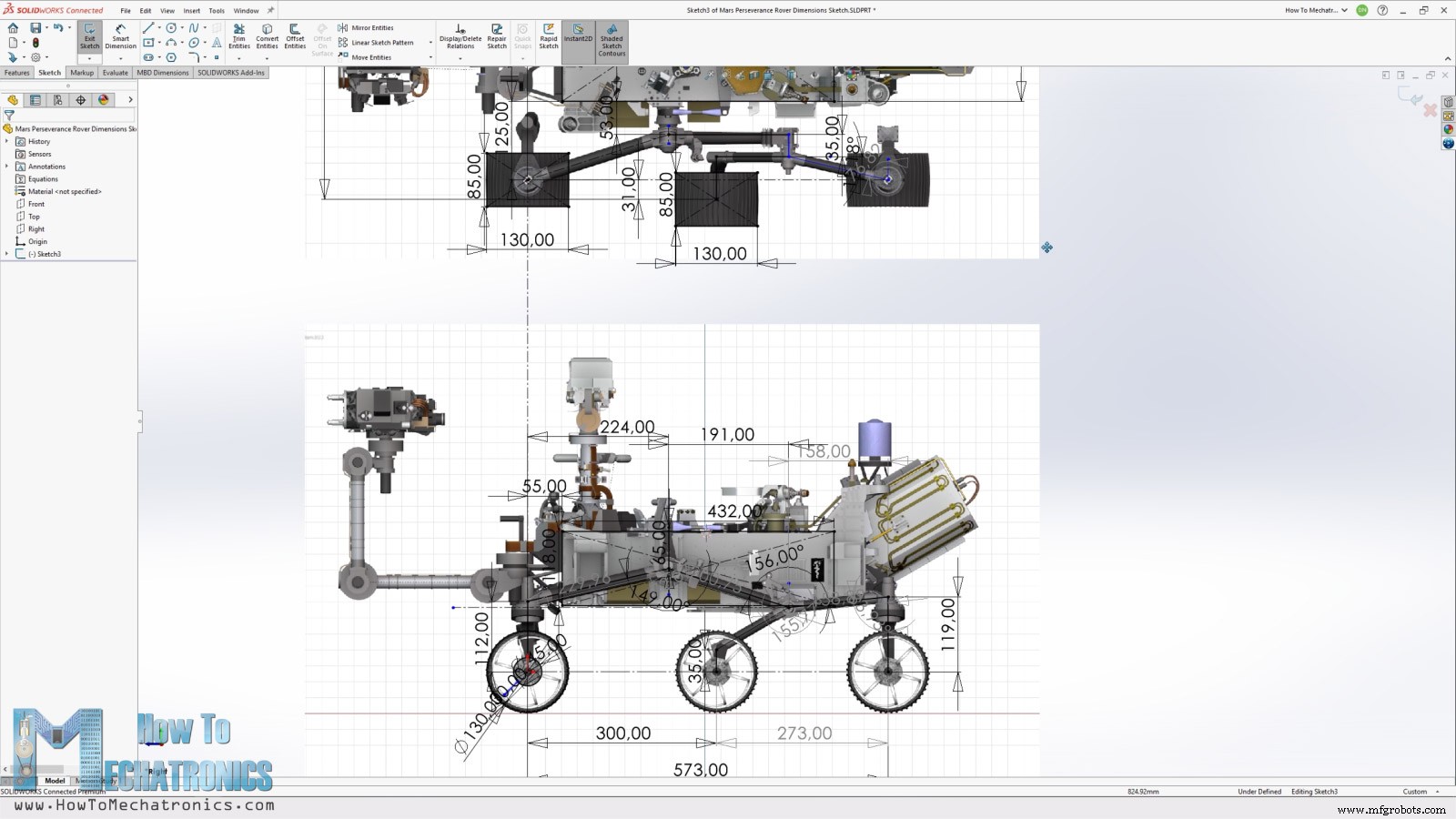
我拍摄了 3 张流动站的前视图、俯视图和侧视图照片,并将它们导入到 Solidworks 中。我希望轮子的尺寸是直径130mm,所以我按照这个尺寸来缩放图片。
然后从这里我获取了所有关键尺寸,比如宽度、长度、高度、车轮之间的距离、摇臂转向架悬架的尺寸等等。
现在根据这些尺寸以及我计划使用的直流电机和伺服系统,我设计了漫游车部件,使其易于 3D 打印和组装,同时尽量保持外观尽可能接近原件。
对于摇臂转向架悬架,我使用 20mm 圆形铝型材,而对于底架,我使用 20mm T 型槽铝型材。
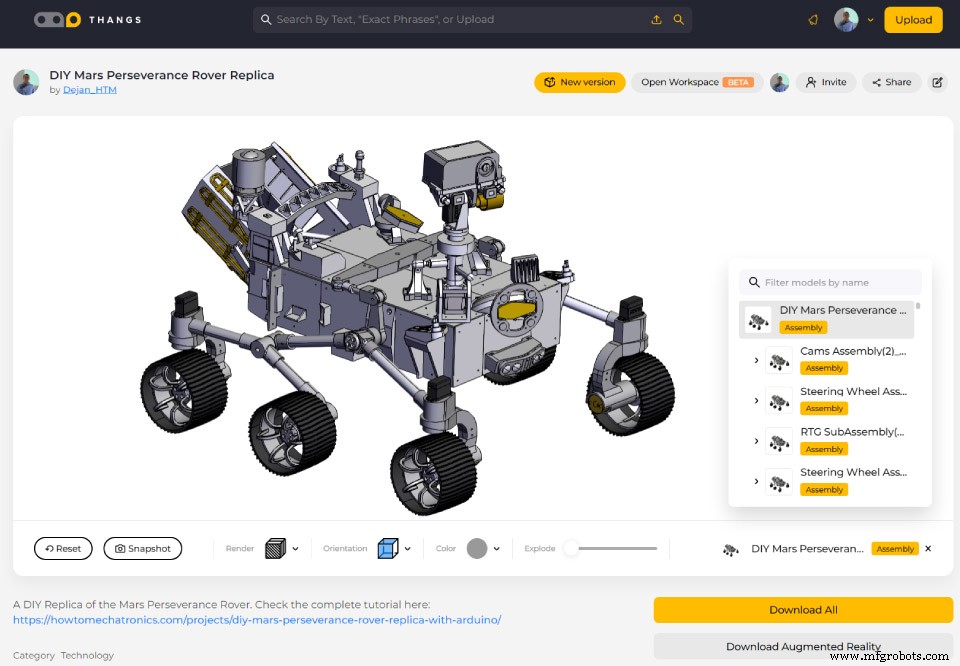
您可以找到并下载此 3D 模型,也可以在 Thangs 上的浏览器中进行探索。
以下是 3D 打印所需的 STL 文件:
对于 3D 打印零件,我使用了旧的 Creality CR-10 以及新的 CR-10 V3 3D 打印机。如果你想用柔性材料打印轮子,你肯定需要一台带直接挤出机的打印机,就像 CR-10 V3 一样。
这两款 3D 打印机都提供了出色的打印质量,同时价格相对实惠。如果您有兴趣,这里有它们的链接,您可以查看它们:
另请参阅:适合初学者和创客的最佳预算示波器 – 2021更新
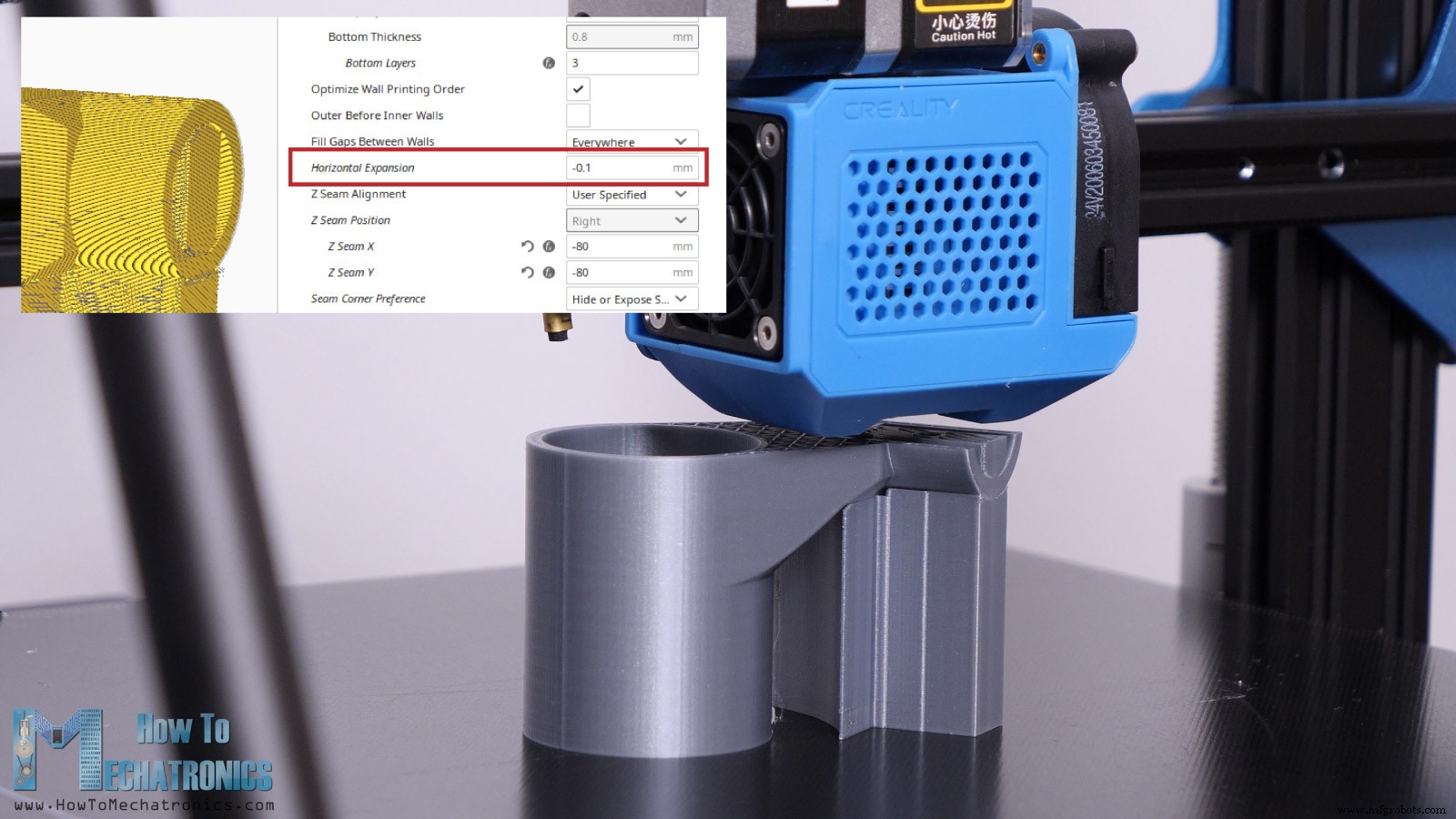
在 3D 打印零件时,使用切片软件中的水平扩展功能非常重要。我使用了 –0.1mm 的值。此功能可补偿打印时灯丝的膨胀。
如果不使用,例如零件有一个直径为 20mm 的孔,实际 3D 打印零件的孔将在 19.8mm 左右,我们将无法组装它。
不过,这里是所有的 3D 打印部件。
老实说,有多少印刷有点疯狂,但这是获得流动站独特外观的唯一方法。不过,如果您选择仅打印该流动站的功能部件,则可以将打印时间缩短一半。
这是组装这个 DIY 火星探测器所需的组件列表。电子元件列表可以在文章的电路图部分找到。
我们还需要各种长度的 M4、M5 和 M6 螺栓。您可以在下方查看完整的所需螺栓和螺母清单。
您也可以从当地的五金店购买螺栓和螺母。
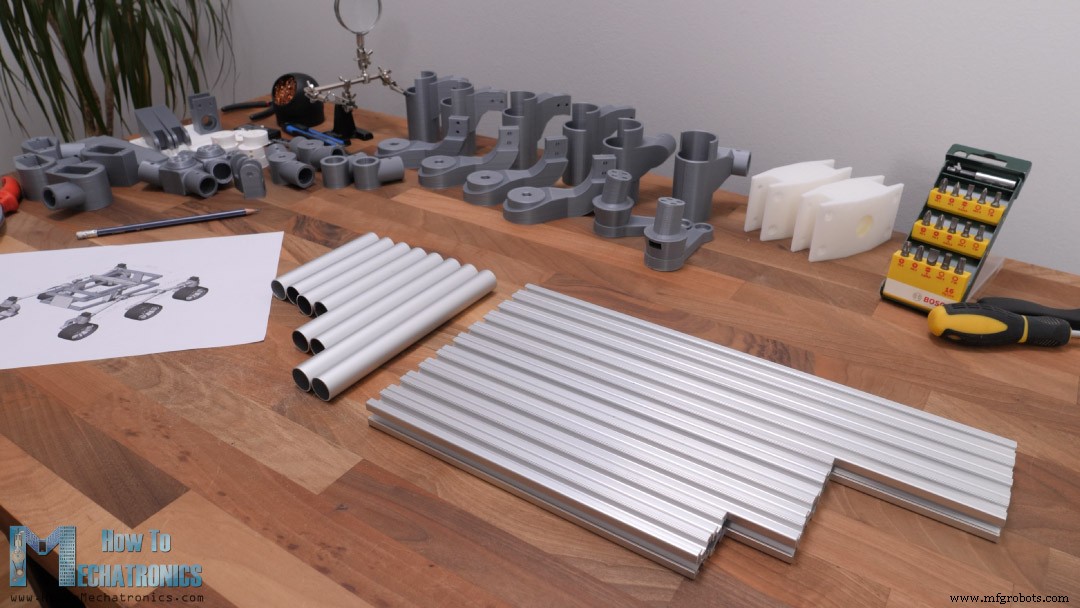
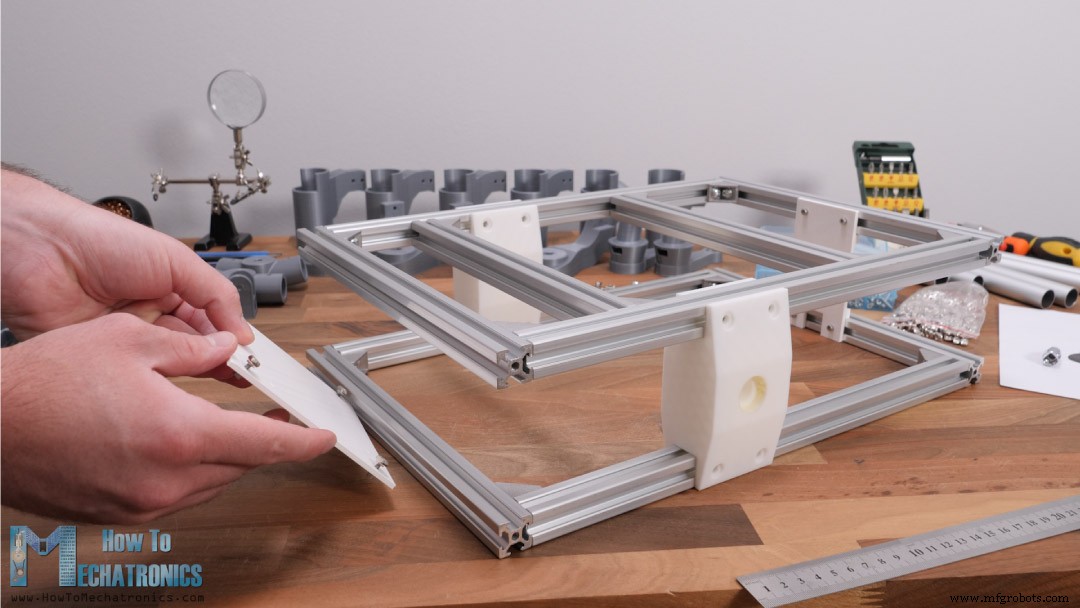
好的,现在我们可以开始组装流动站了。首先,我们需要准备铝型材。我用金属手锯将它们切割成合适的尺寸。
我们需要 10 个用于底座的 T 型槽型材和 8 个用于摇臂转向架悬架的圆形型材,尺寸如下。
为了组装 T 型槽型材框架,我们使用了合适的 T 型槽角支架和一些螺栓和螺母。一旦我们准备好顶部和底部框架,我们就可以通过在侧面插入摇臂关节 3D 打印部件以及在正面和背面插入一些 3D 打印支架来完成底座。为了将它们固定到位,我们需要 M3 螺栓和 T 形槽螺母。
对于摇臂接头,我使用了 M5 螺栓和螺母。前轮廓到摇臂接头的距离需要134mm。
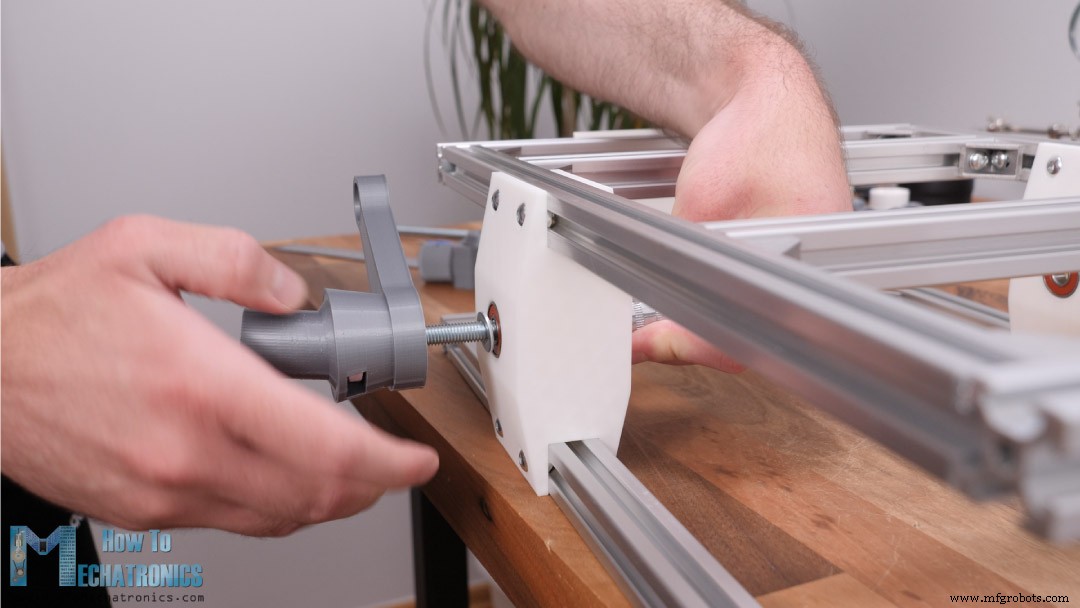
接下来,我们可以将摇臂转向架悬架的主轴承插入到位。然后,我们有摇臂关节轴,它将使用 M8 螺栓连接到底座上。
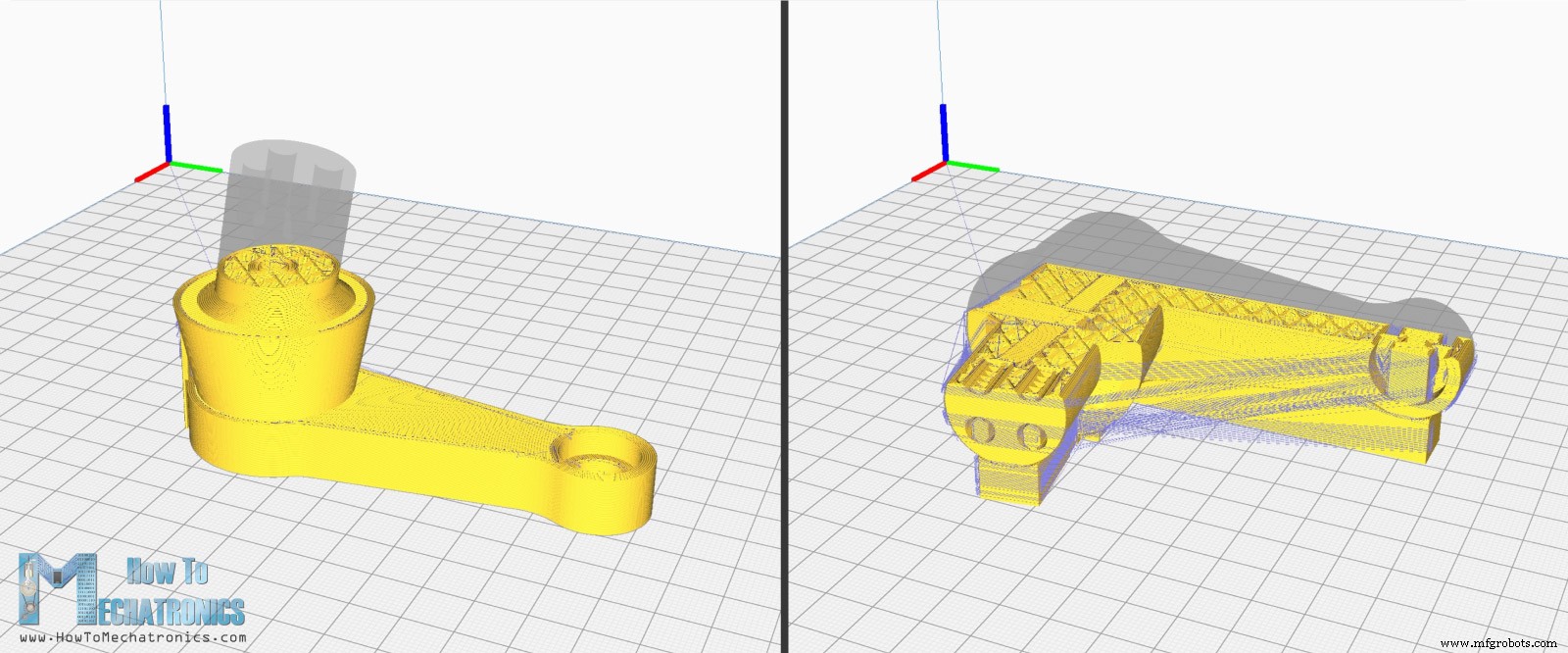
轴有一个槽,我们可以在其中插入一个 M8 螺母,用于将其固定到底座上。轴的孔为 7.5 毫米,因此我们在螺栓和轴之间有紧密的连接。通过这种方式,我们实际上加固了 3D 打印轴,因为螺栓本身将承担火星车的部分重量。这是整个组件中受力最大的部分,因为漫游车的整个重量都由摇臂轴支撑。我们打印零件的方式对于它们的强度非常重要。
我最初用更简单的方式打印了这个轴,不需要支撑材料,但是打印失败了。
这样,主要应力作用在不那么强的层上,但是如果我们将零件横向打印,应力将作用在壁轮廓上,零件会变得更强并且不会失效。
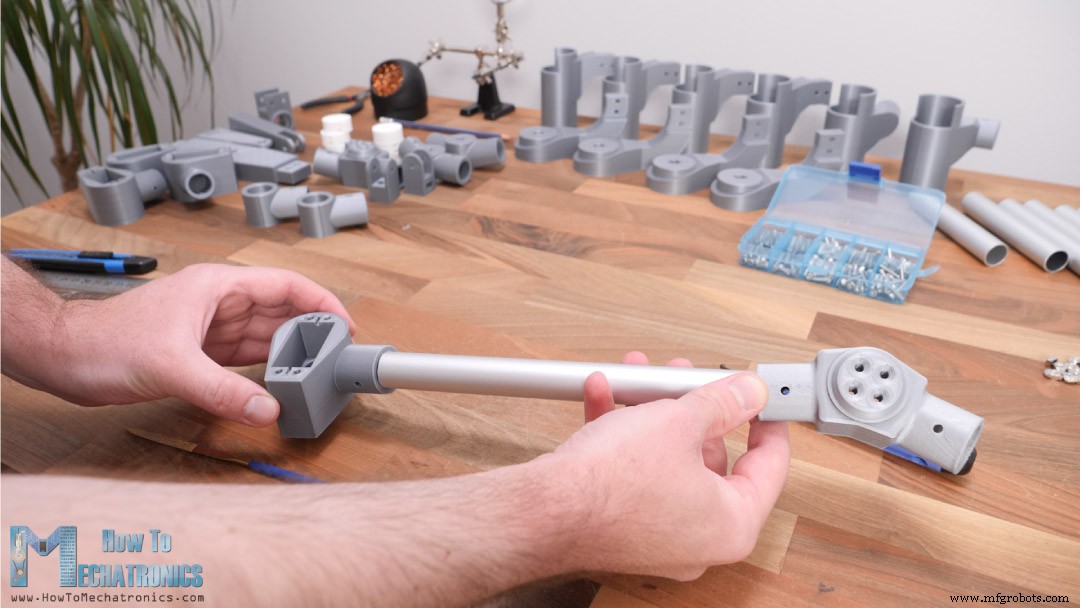
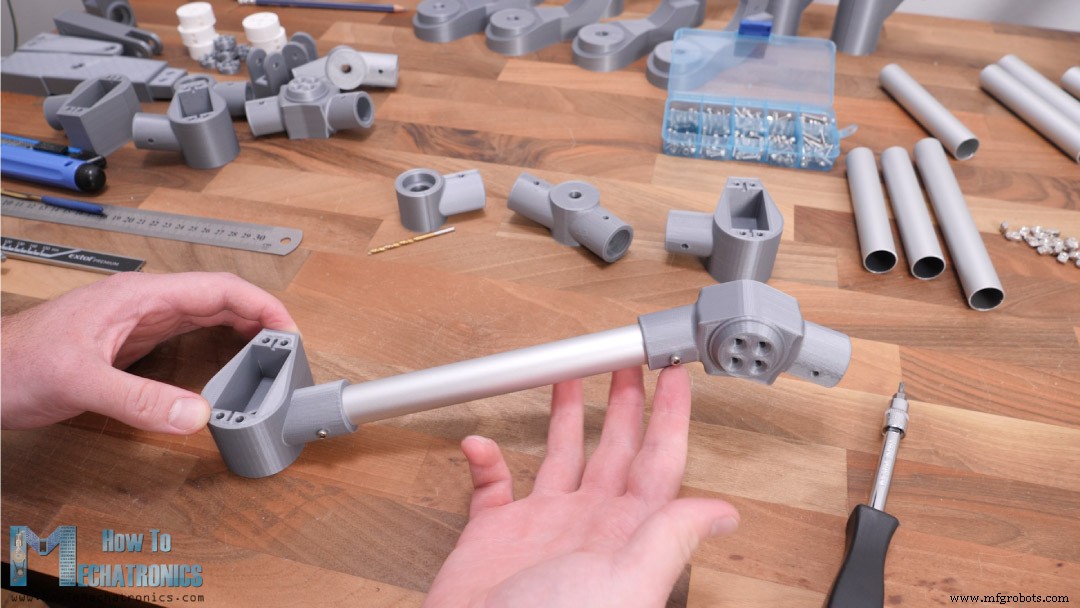
尽管如此,现在我们将继续将摇臂转向架悬架与车轮接头和电机支架组装在一起,稍后我们会将这些子组件连接到摇臂轴上。
20mm圆形型材所在零件的孔尺寸要紧贴合,因此在某些情况下我们需要使用锉刀或砂纸使其贴合。
现在为了正确组装这些零件,我们需要在圆形轮廓的精确位置打孔。为此,首先我们将在轮廓上标记一条直线。
接下来,我们可以将轮廓插入 3D 打印零件中,标记线穿过零件的孔。然后我们可以在该零件的两侧标记出需要钻孔的位置。
在轮廓的另一侧,我们需要重复相同的过程。
我使用 2.5 毫米钻头钻孔,然后使用 M3 螺栓在型材上钻了一个螺纹,用于拧紧零件。
铝型材比螺栓更柔软,因此很容易用螺栓本身制作螺纹。遵循这种钻孔方法非常重要,以便最终所有零件都按照它们应该彼此相对的位置进行定位。
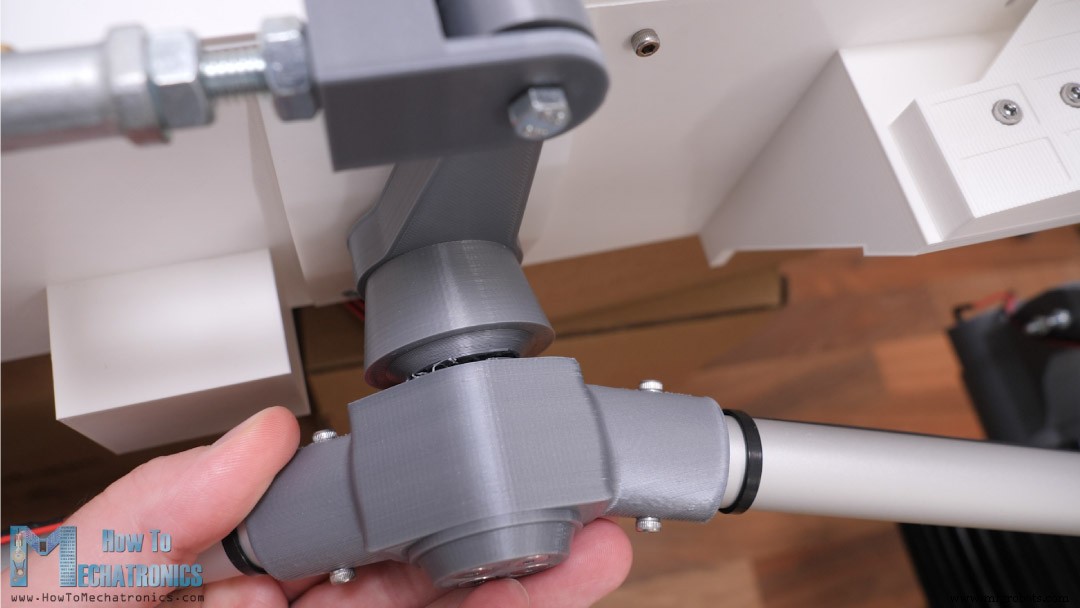
对于转向架接头,我们还使用了两个轴承和一个 M8 螺栓。
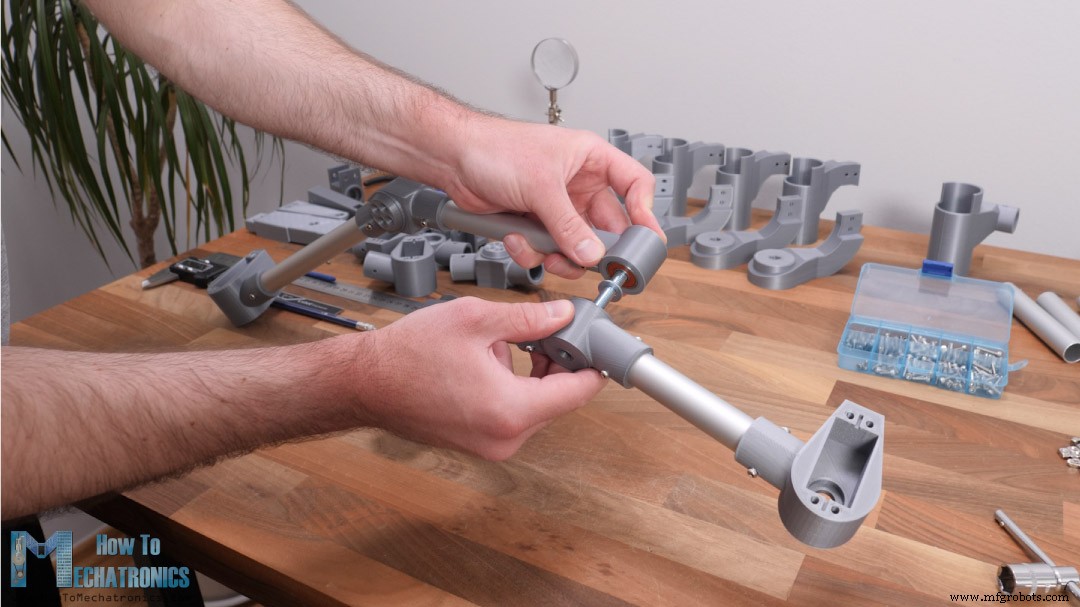
一旦我们完成了摇臂-转向架悬架布置,我们就可以继续组装方向盘接头。方向盘接头部分由用螺栓固定在一起的两部分组成。
对于伺服安装部分和直流电机安装部分之间的实际接头或连接,我们使用两个轴承和一个 M6 螺栓。
在螺栓的顶部或头部,我们需要连接一个伺服喇叭,我们借助这个 3D 打印的耦合器和一些 M3 螺栓来做到这一点。
耦合器有一个六角槽,伺服运动将通过该槽传递到螺栓。在底部,我们可以拧紧接头的其他部分。
我们使用 M6 螺母固定此连接。这样就完成了方向盘接头,虽然稍后我会意识到我们实际上需要在底部添加另一个 M6 螺母并将其拧紧到另一个螺母上。
我们需要这样做,因为来自伺服的运动通过螺母本身传递到直流电机安装部分,如果不使用另一个螺母拧紧,整个接头就会松开。
同样的程序适用于另一个角接头。如果我们将此组件放在平坦的表面上并且所有三个电机安装座都平放或所有这些都相互平行,我们就知道我们已经正确连接了所有东西。
当然,我们用同样的方法组装另一面。但是,我们可以在这里注意到,虽然有些零件看起来相同,但它们并不是相同的零件,而是实际上是镜像的。
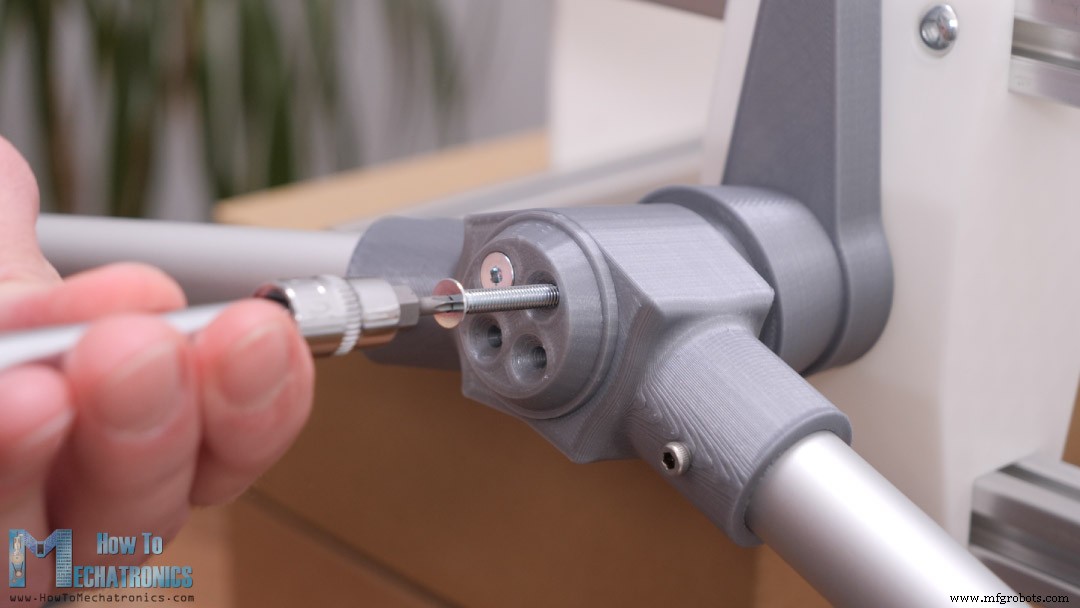
接下来,我们需要将这些子组件插入到基础框架或底盘上的摇臂关节轴上。不过,在我们这样做之前,我们需要在轴中插入一些带螺纹的黄铜嵌件。
使用烙铁,我们可以轻松地将它们插入到位,因此我们获得了一个良好且可靠的螺纹孔,用于固定悬挂子组件。为此,我们需要四个 M4 螺栓。
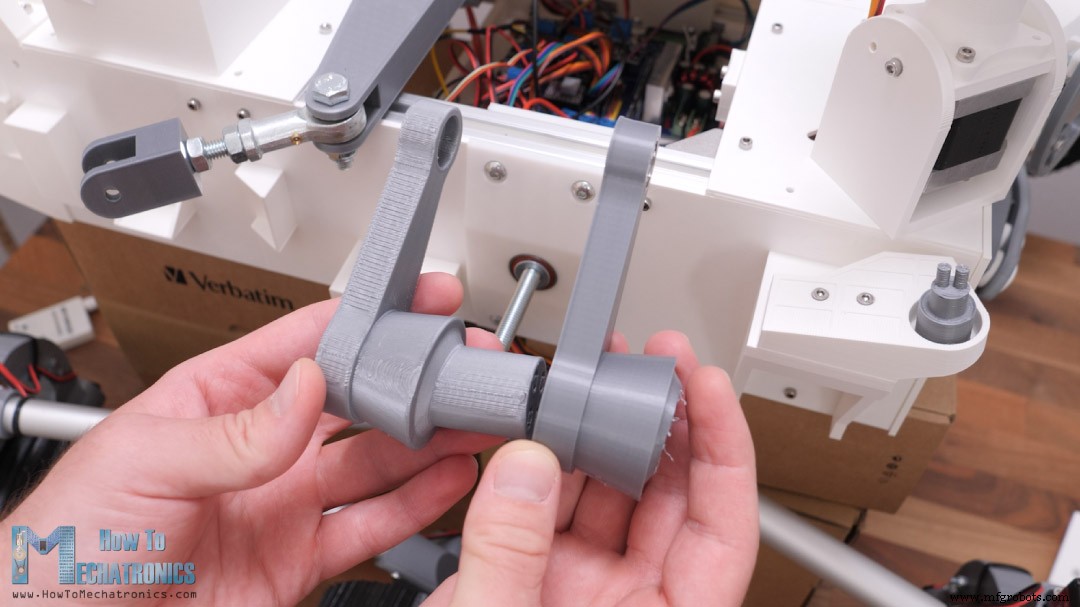
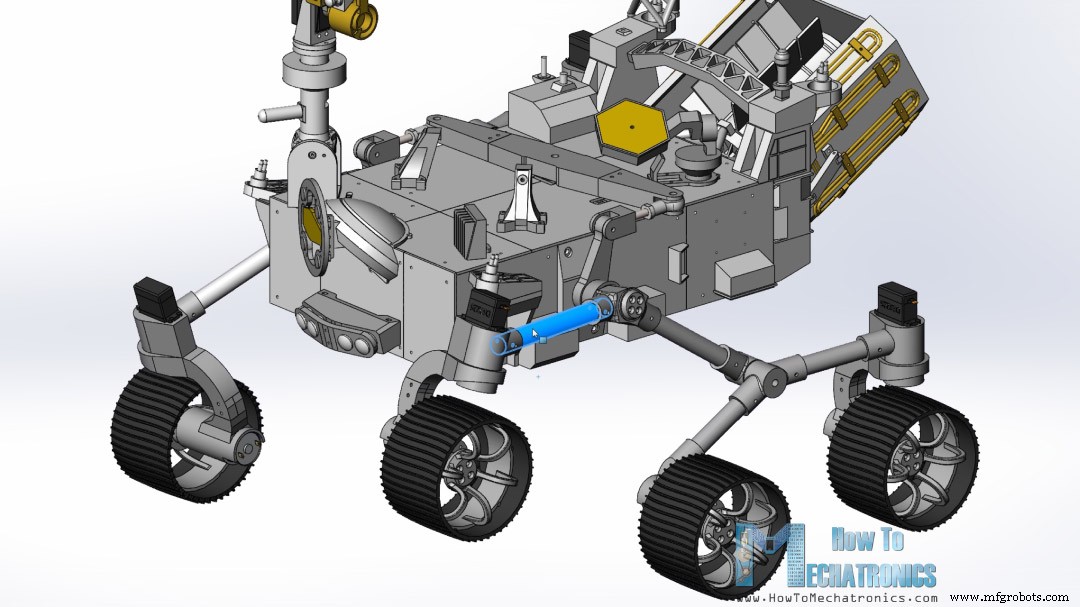
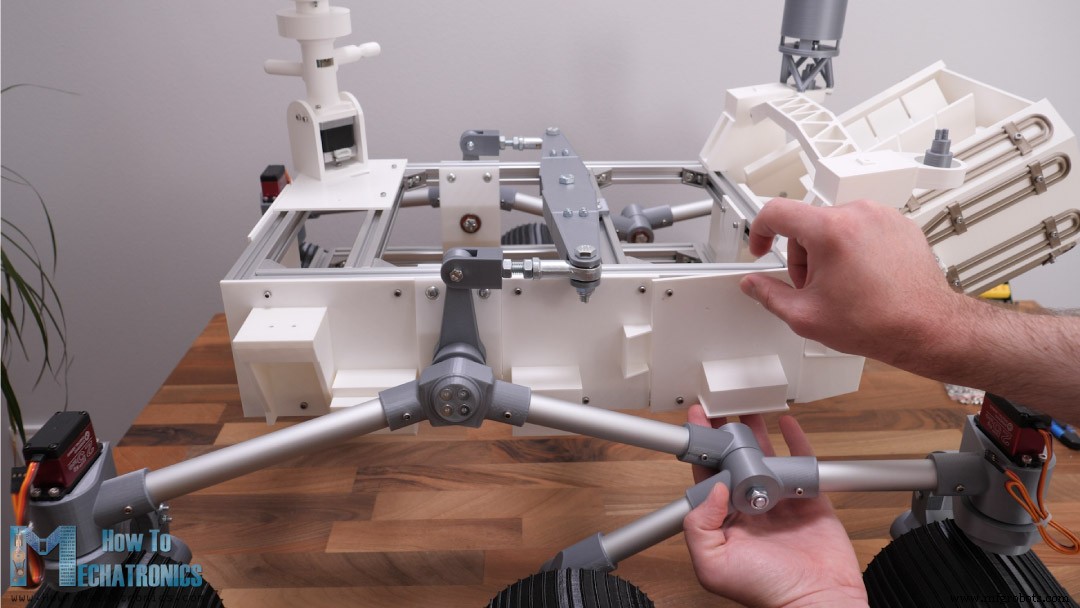
一旦我们将它们安装在两侧,我们可以注意到底盘可以自由落下或旋转。所以,为了让摇臂转向架悬架正常工作,我们实际上遗漏了一些东西,这就是差速器。
通过差速器,两个摇杆相互连接并连接到流动站底盘。采用这种配置,当一侧旋转时,另一侧向相反方向旋转,从而提供大致相等的车轮接触。
底盘将具有两个摇杆的平均俯仰角。
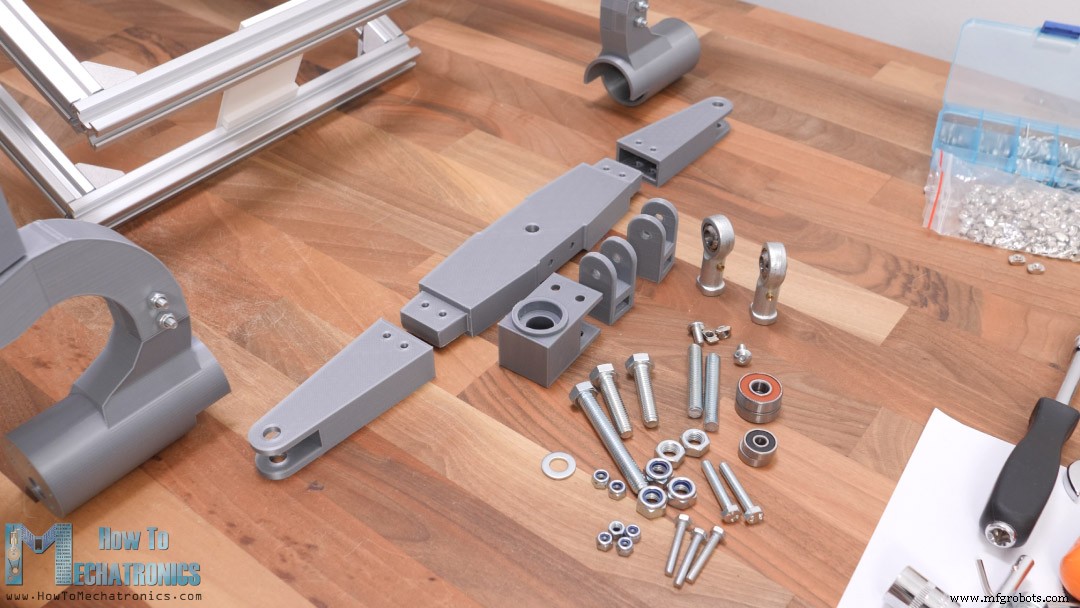
以下是组装差速器所需的所有零件。
由于差速器杆很长,我将它用螺栓固定在一起的三块制成,这样我们甚至可以在较小的 3D 打印机上进行 3D 打印。差速杆将通过一个由两个轴承和一个 M8 螺栓组成的接头在底盘中间枢转。
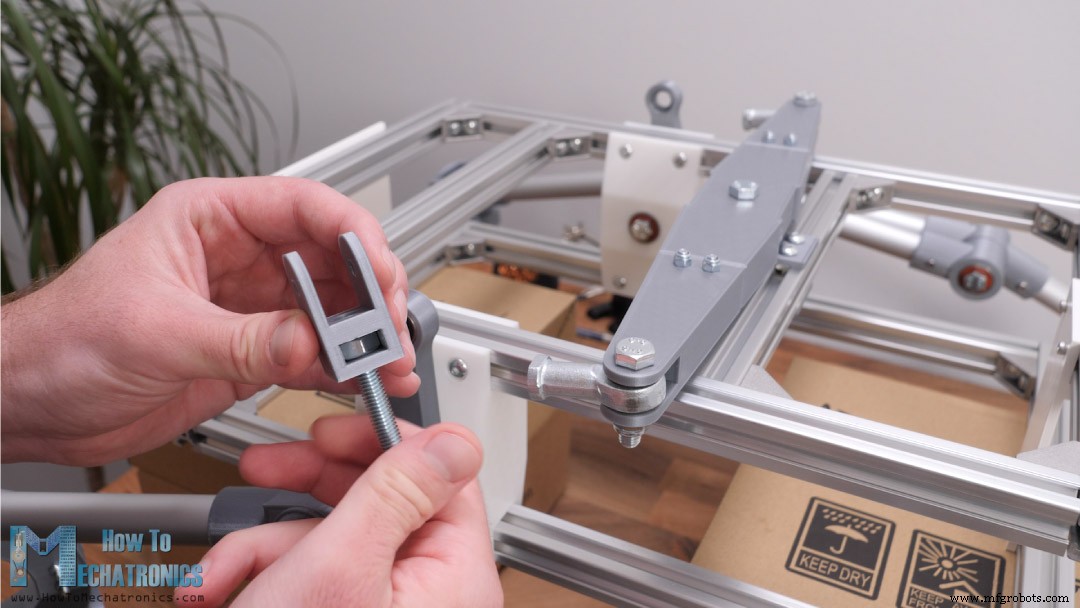
为了将差速器与摇杆连接起来,我们需要一个杆端球形接头。我使用的是 M8 杆端球形接头,我们还需要一个长度为 50 毫米的 M8 螺纹杆。螺纹杆进入 3D 打印部件,该部件一侧有一个 M8 螺母,另一侧进入杆端球接头。
在这里,我们需要调整 3D 打印的差速器连杆和杆端之间的距离,该距离需要在 20mm 左右,以使底盘保持水平。为了连接差速器连杆和摇杆,我们使用了两个轴承和一个 M5 螺栓。
我们也对另一侧重复此过程,这样我们的摇臂转向架悬架就完成了。当一侧上升时,另一侧下降,反之亦然。
这使所有车轮始终与地面接触。底盘只进行腿部运动的一半,或者底盘具有两个摇杆的平均俯仰角。
另请参阅:Arduino 机械臂和麦克纳姆轮平台自动操作
好的,接下来我们可以继续安装直流电机了。我使用的电机直径为 37mm,工作电压为 12V,并有一个输出为 50RPM 的变速箱。
虽然后来我意识到 50RPM 对于这辆火星车来说有点太多了,所以我建议选择 20 或 10 RPM 的版本。
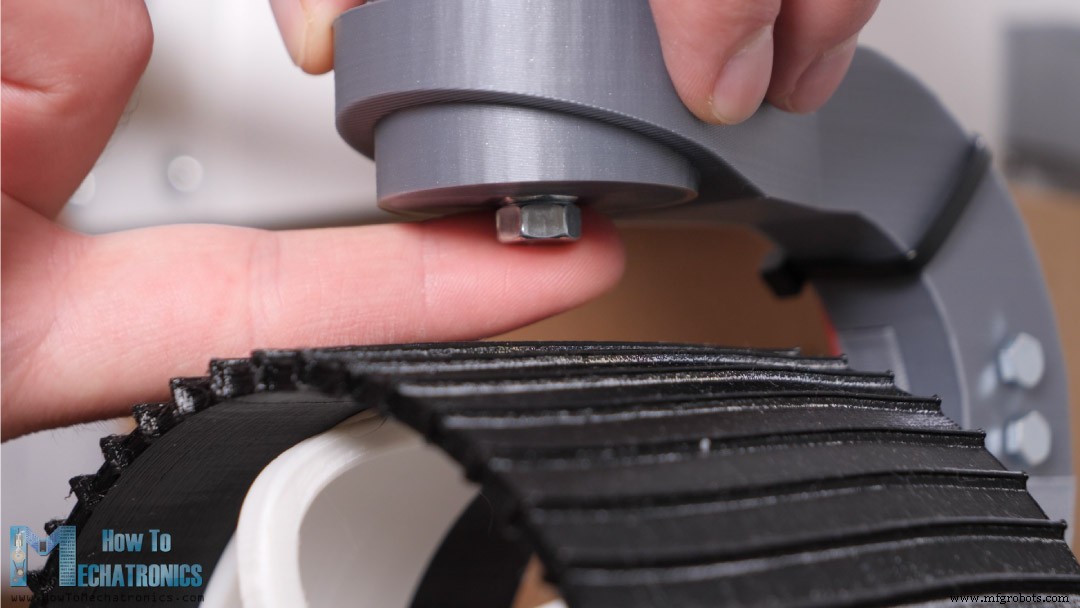
为了将轮子连接到电机上,我制作了这些联轴器。
在这里,我们需要安装 M3 螺纹嵌件,用于将耦合器固定到轴上,还需要安装 M4 螺母,用于将车轮固定到耦合器上。插入螺母时,我们还应该添加一些胶水,以便它们牢固地固定到位,或者使用螺纹嵌件代替。
接下来,我们可以安装轮子。轮子由两部分组成。一个是我用柔性灯丝打印的轮子,但不是必须的,另一个是用普通 PLA 打印的轮辋。
轮辋上有槽,可装入车轮,因此来自电机的动力传递到车轮。我们可以在插槽处添加几滴胶水以使其更加牢固。最后,我们可以使用 4 个 M4 螺栓将车轮连接到联轴器或直流电机上。
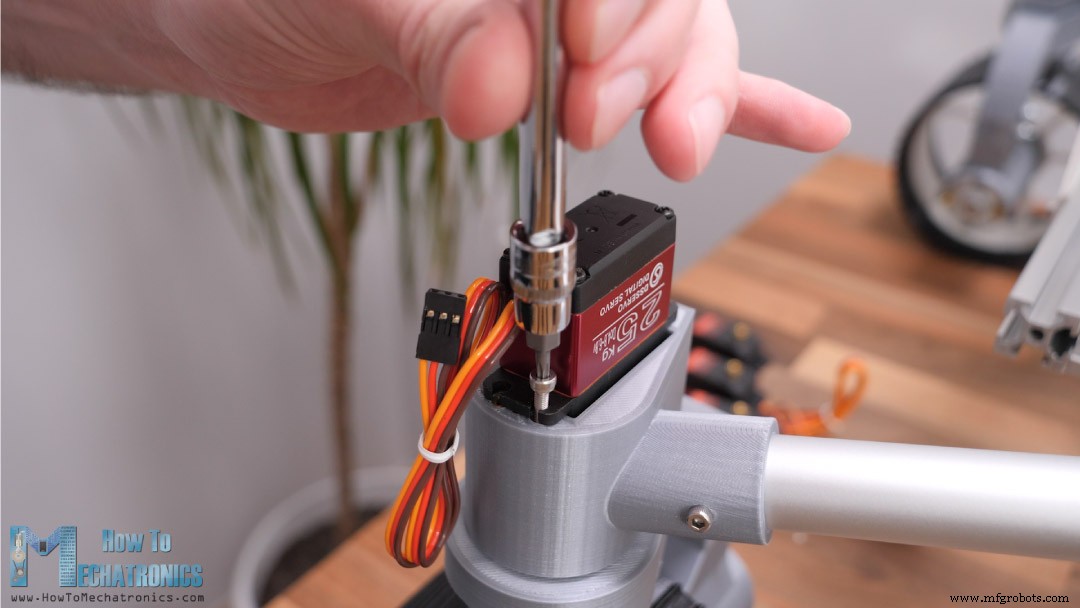
好的,接下来我们可以安装转向伺服电机。我正在使用具有 25kgcm 扭矩和 4.8 至 6.8V 工作电压的高扭矩数字伺服系统。为了将伺服系统固定到位,我们使用了四个 M3 螺栓,它们进入伺服安装 3D 打印部件中的 M3 螺纹插件。
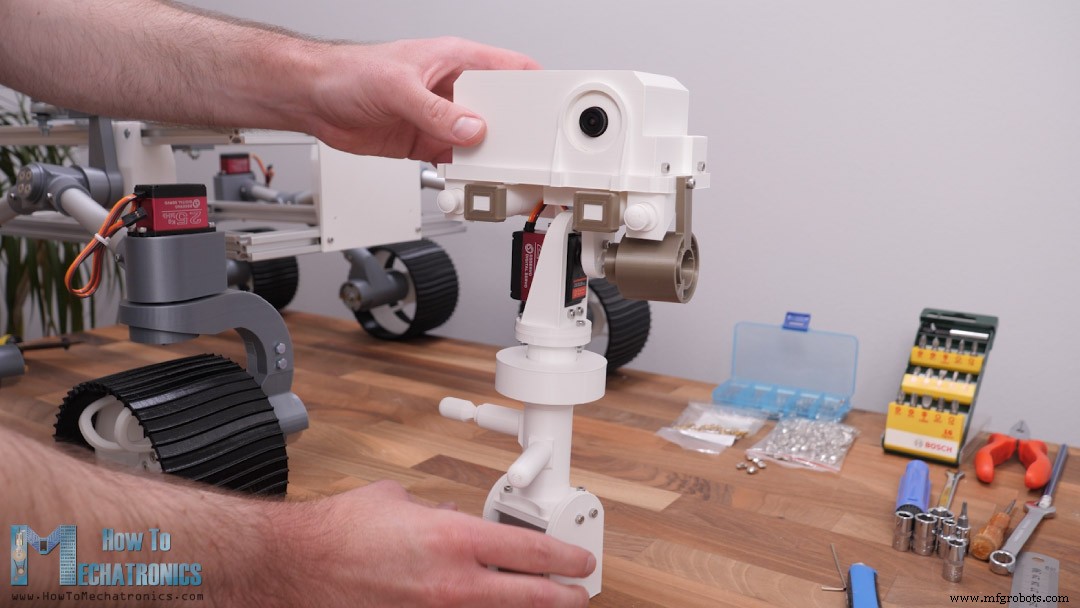
接下来,我们可以组装相机单元。对于平移相机,我决定使用 NEMA 17 步进电机,但您可以在此处更改任何其他类型的电机。
使用 M5 螺纹杆将电机运动传递到上部,该螺纹杆通过 3D 打印联轴器连接到电机,而在另一侧,我们使用轴承和两个螺母将螺纹杆固定到移动元件上。为了倾斜相机,我使用的伺服系统与我们用于方向盘的伺服系统相同。
相机单元上的许多部件都不起作用,它们的存在只是为了匹配真实漫游车的外观。为了组装这些零件,我们需要各种 M3 螺栓和一些螺纹嵌件。
不过,我也会在这里安装一个真正的 FPV 摄像头。我为它制作了一个定制的支架,这样我就可以将它安装在相机单元的外壳上。相机可以从顶部轻松访问,我们用卡扣盖将其关闭。这是相机单元的最终外观。
我将整个相机子组件安装在机箱的右前角。
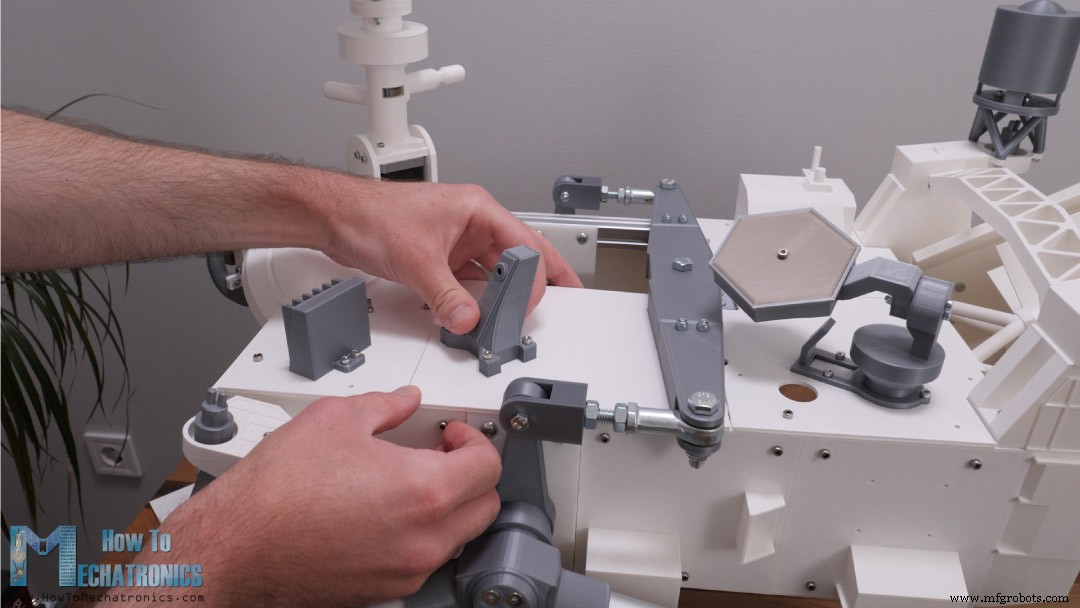
在这一点上,我们可以继续组装其余的 3D 打印部件,这些部件实际上没有功能,只是为了匹配真实漫游车的外观,或者连接电子元件并让漫游车工作。我决定先组装所有 3D 打印零件,然后再做电子产品。
就像我说的,以下零件只是为了匹配火星车的外观,我不会详细说明如何组装它们。您可以从 3D 模型中看到需要如何连接所有东西。
我实际上在设计这些部分时付出了很多努力,注重细节以使一切看起来都很好。
这些部件也很大,3D打印需要一些时间。
这是我如何安装它们的快速视图。
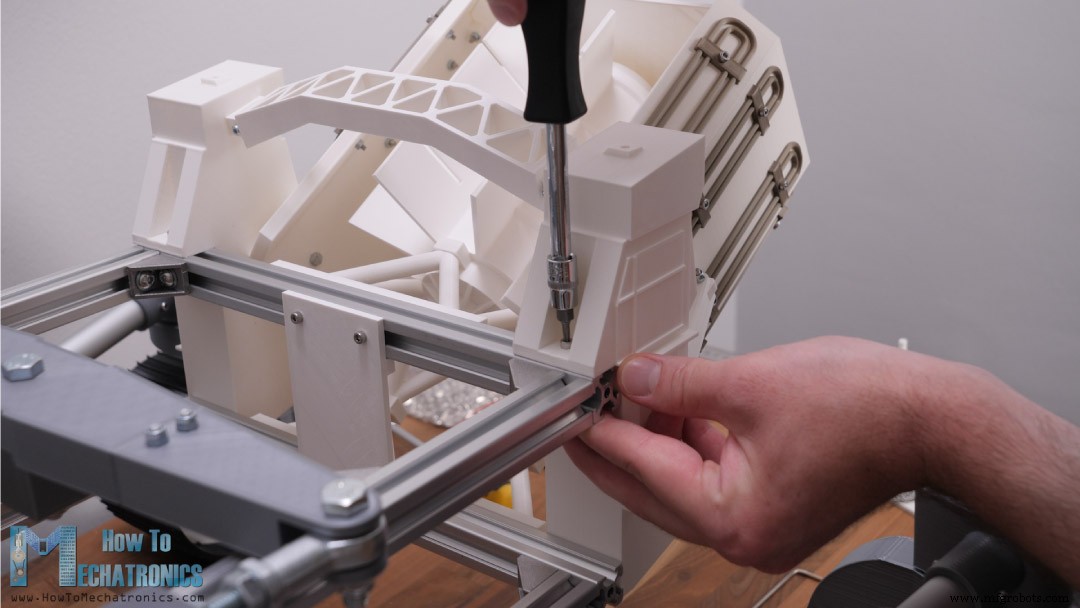
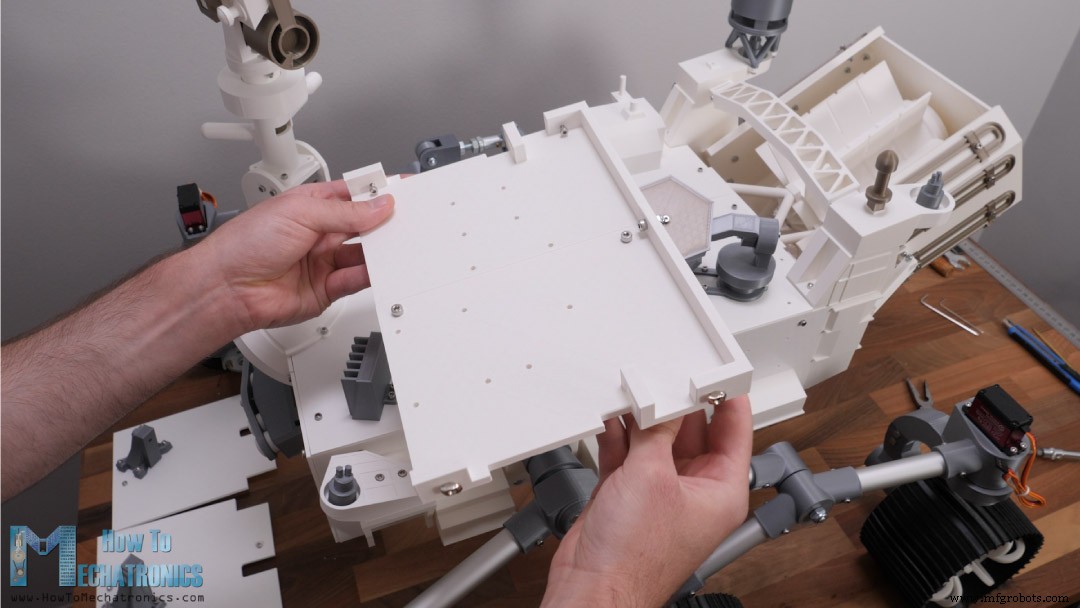
流动站中间的最后两个顶部面板设计为可卡入流动站。
它们实际上将充当一个罩子,可以轻松移除,因为电子元件将位于该区域。
电子元件支架由两个用螺栓固定在一起的 3D 打印部件制成,并连接到底盘的底部框架。
好的,现在我们可以继续使用电子设备了。首先,我们需要测量每个电机需要多少电线。由于没有合适的电机连接器,我将电线直接焊接在电机上。我使用热缩管来隔离连接器。
在一些扎带的帮助下,我们可以引导和保持电线的清洁。
对于伺服电机,我们可以使用伺服延长线将电线延长到电子室。电子安装部分有插槽,我们可以通过这些插槽将电线穿过火星车的中间。
总的来说,我认为接线很干净,电线从可见部分后面穿过。
另请参阅:SCARA 机器人 |如何构建自己的基于 Arduino 的机器人
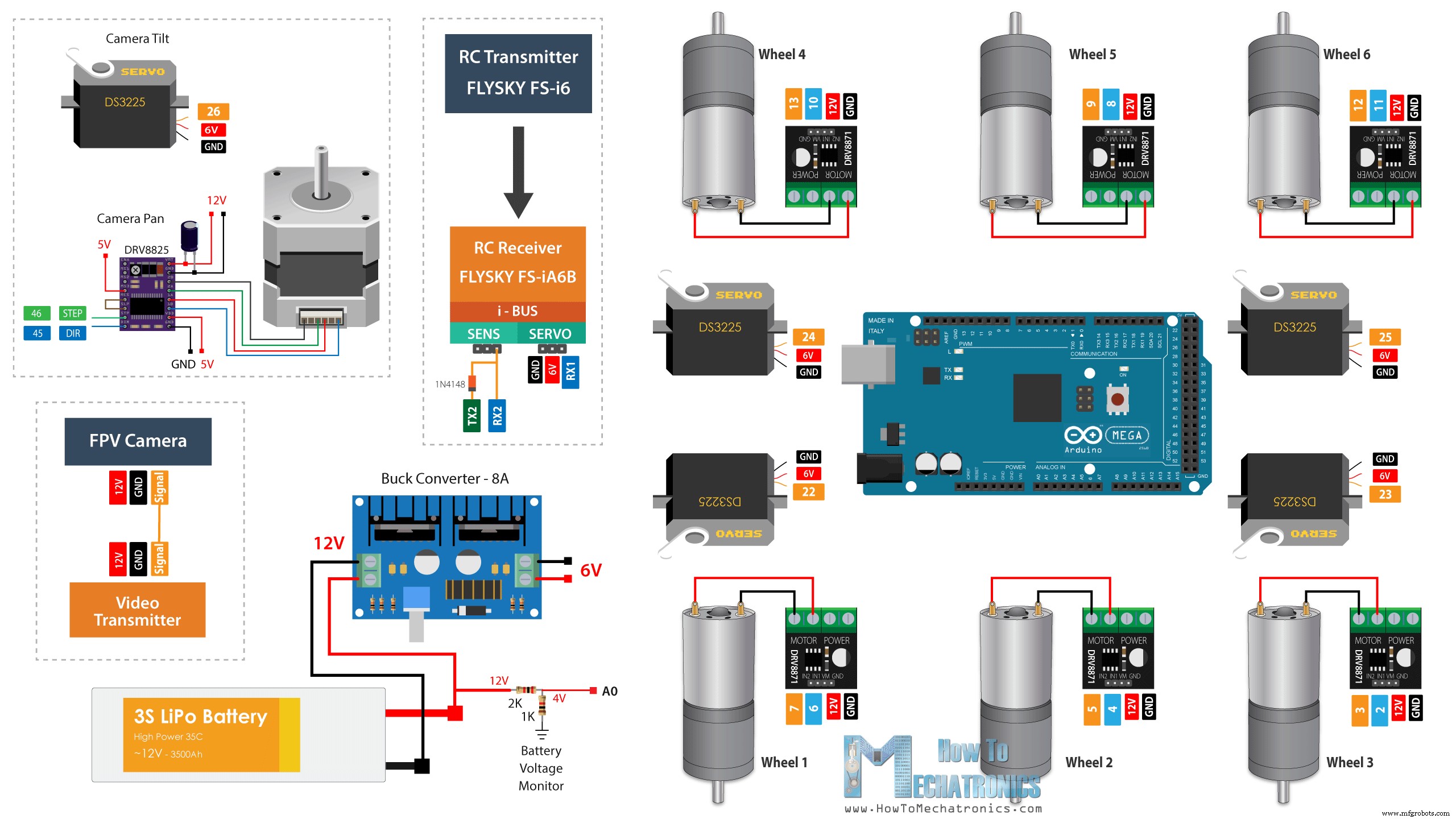
现在让我们看一下这辆火星车的电路图,看看所有东西都需要如何连接。
您可以通过以下链接获取本项目所需的组件:
为了驱动六个直流电机,我们使用了六个支持 PWM 控制和高达 3.6A 峰值电流的 DRV8871 直流电机驱动器。直流电机工作电压12V,额定电流1A,堵转电流3A。为了给流动站供电,我使用了 3S 锂聚合物电池,提供大约 12V 的电压。
另一方面,舵机需要从 4.8 到 6.8V,因此我们需要一个 DC-DC 转换器,它将 12V 转换为 6V。转换器需要能够处理大约 8A 的电流,因为我们使用的伺服系统非常强大并且具有大约 2A 的失速电流。为了驱动相机单元步进电机,我们可以使用 A4988 或 DR8825 步进驱动器。使用两个电阻器,我们可以制作一个简单的分压器,通过它我们可以监控电池电压。
RC 接收器由降压转换器提供的 6 伏电压供电,FPV 摄像机及其视频发射器由电池提供的 12V 电压供电。
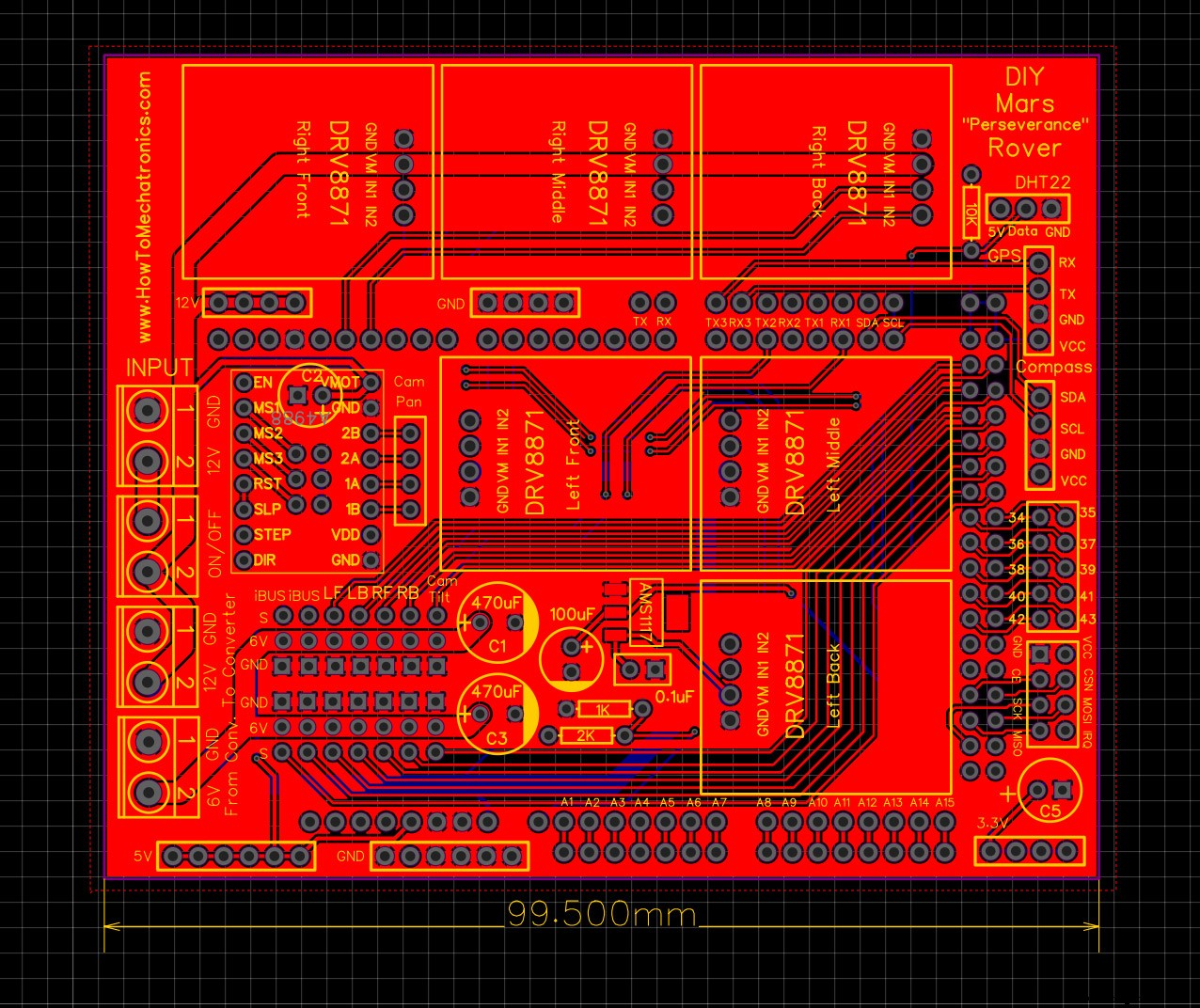
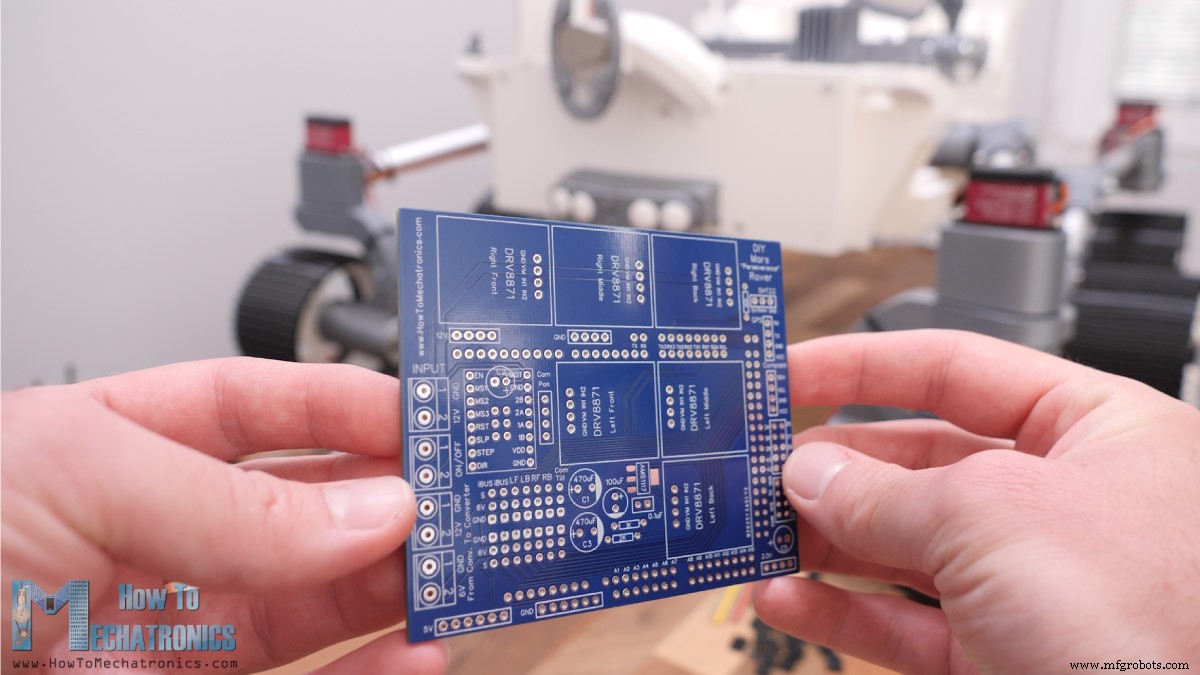
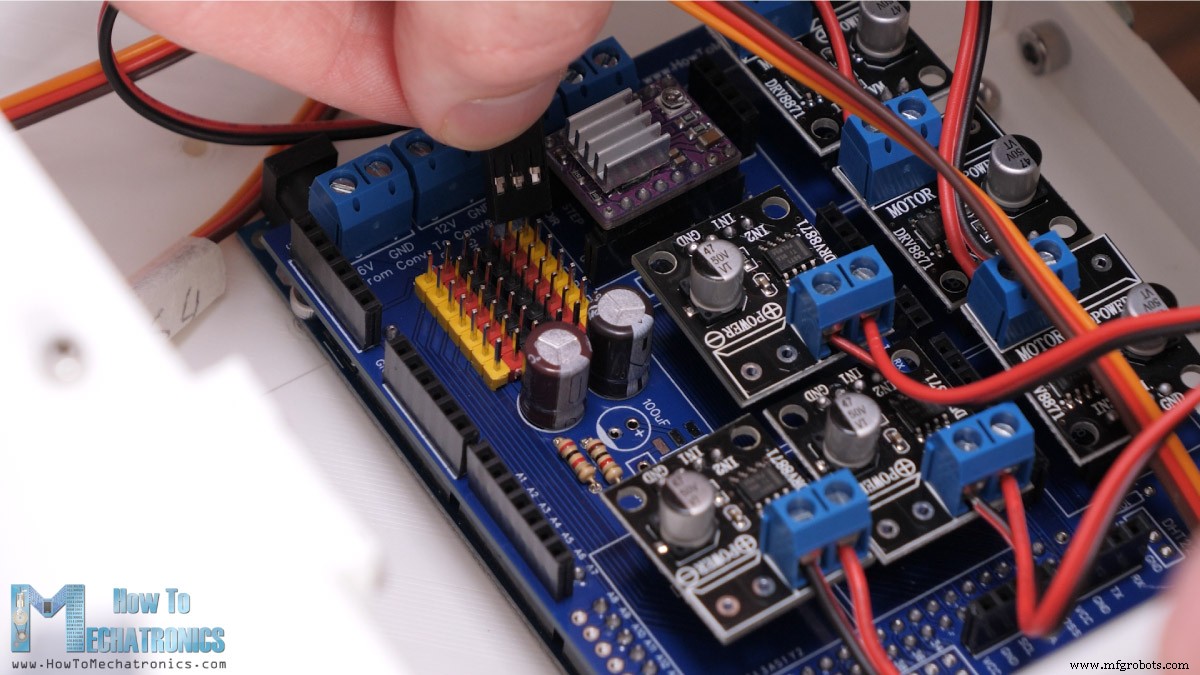
为了让电子元件井井有条,我为这个 DIY 火星探测器设计了一个定制的 PCB。
该 PCB 实际上将充当 Arduino MEGA 屏蔽,因为我们将能够直接将其连接到 Arduino MEGA 板的顶部。除了电机驱动器外,我还包括一个 3.3V 稳压器和一个专用 NRF24L01 连接,以防您想使用该模块控制流动站,以及用于 DHT22 传感器、指南针、I2C、串行通信、12V、5V 的连接, 3.3V 和 GND 连接。实际上,我为这块 PCB 进行了面向未来的升级,以升级流动站的功能。
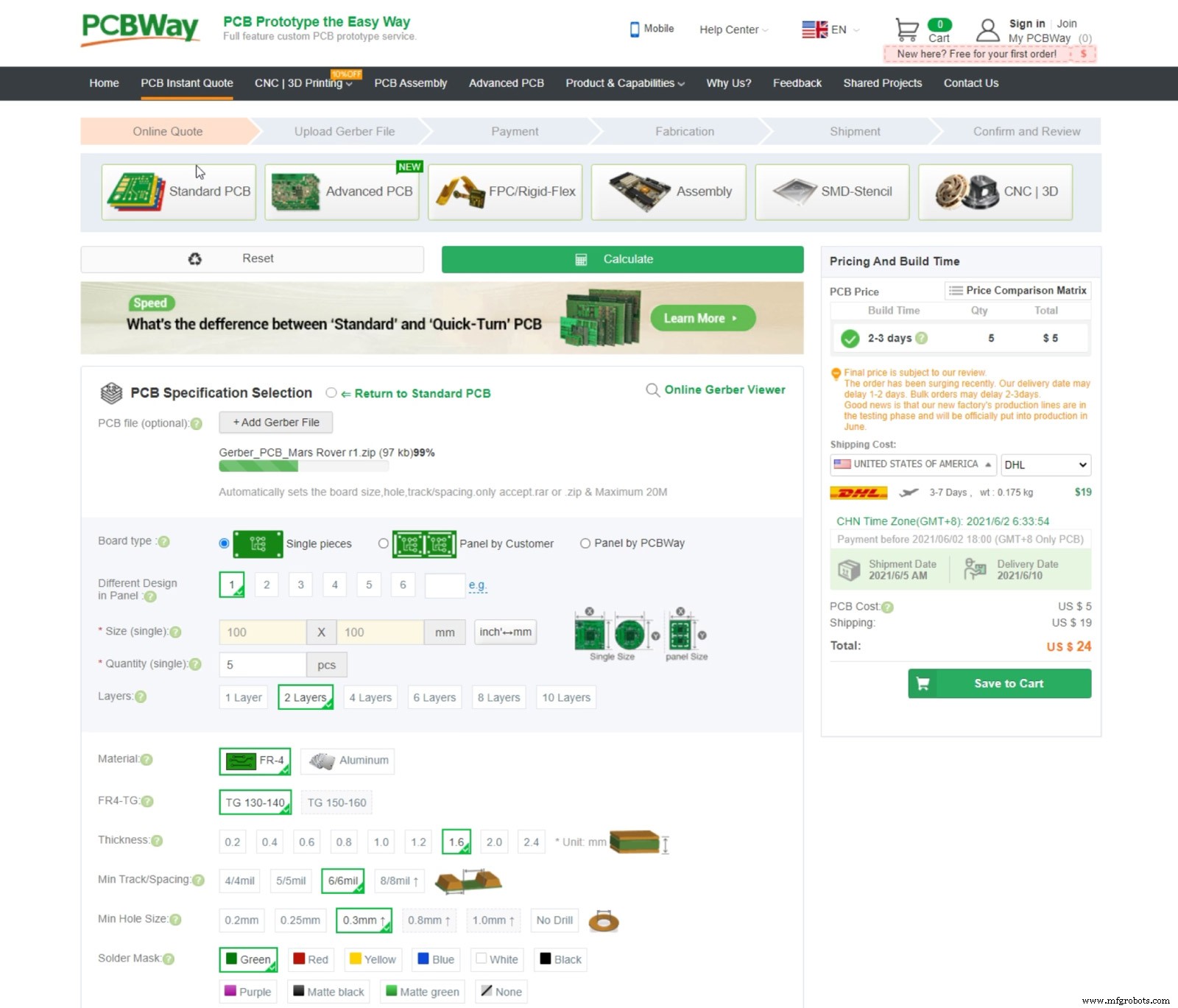
我从 PCBWay 订购了 PCB。在这里我们可以简单地上传Gerber文件,选择我们PCB的属性,然后以合理的价格订购。
我没有更改任何默认属性,除了我选择蓝色以与 Arduino 板匹配的 PCB 颜色。您可以在下方下载 Gerber 文件,或从 PCBWay 项目共享社区下载,您也可以通过该社区直接订购 PCB。
这是您可以下载此 DIY 火星探测器 PCB 的 Gerber 文件:
然而,几天后,PCB 到了。 PCB的质量很好,一切都和设计中的一模一样。
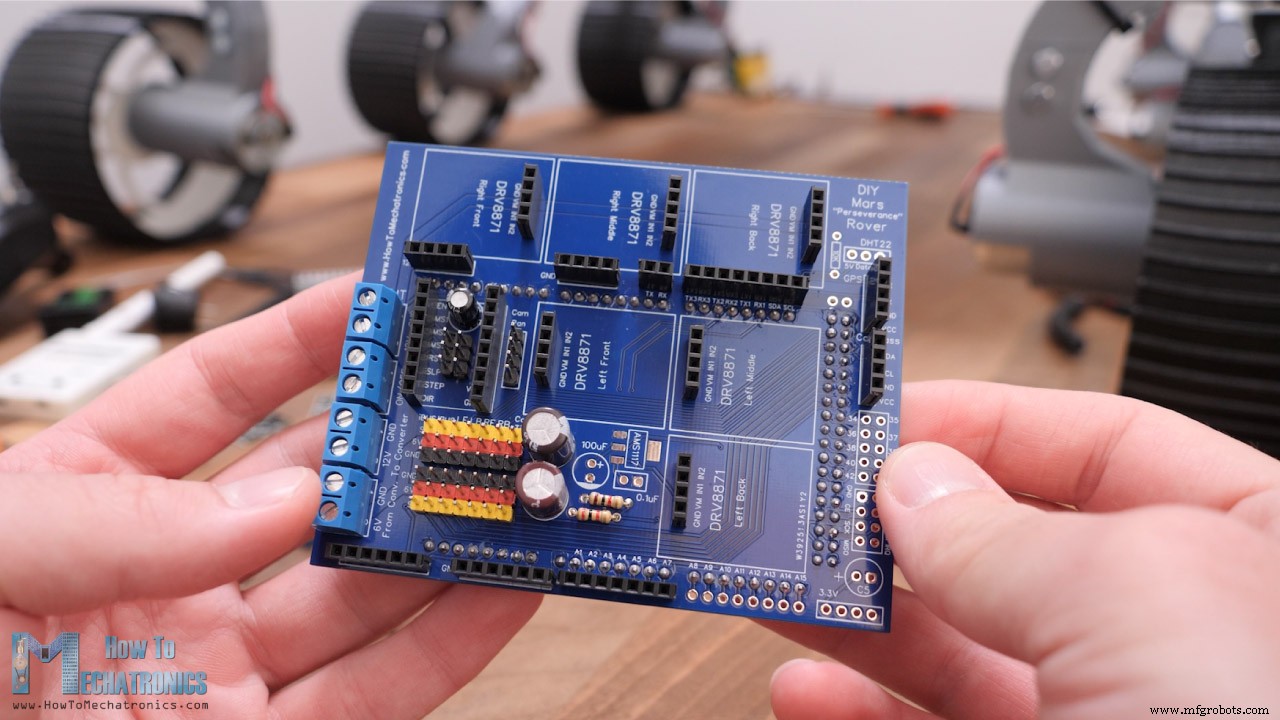
组装 PCB 非常简单,因为所有东西都贴上了标签。我开始焊接 PCB 底部的排针,用于 Arduino MEGA 连接,然后继续顶部。实际上,我对所有连接都使用了排针,因为如果某些东西不能正常工作,它可以灵活地进行更改。我没有焊接 3.3V 稳压器以及一些空闲的 Arduino 引脚,因为无论如何我现在都不会使用它们。
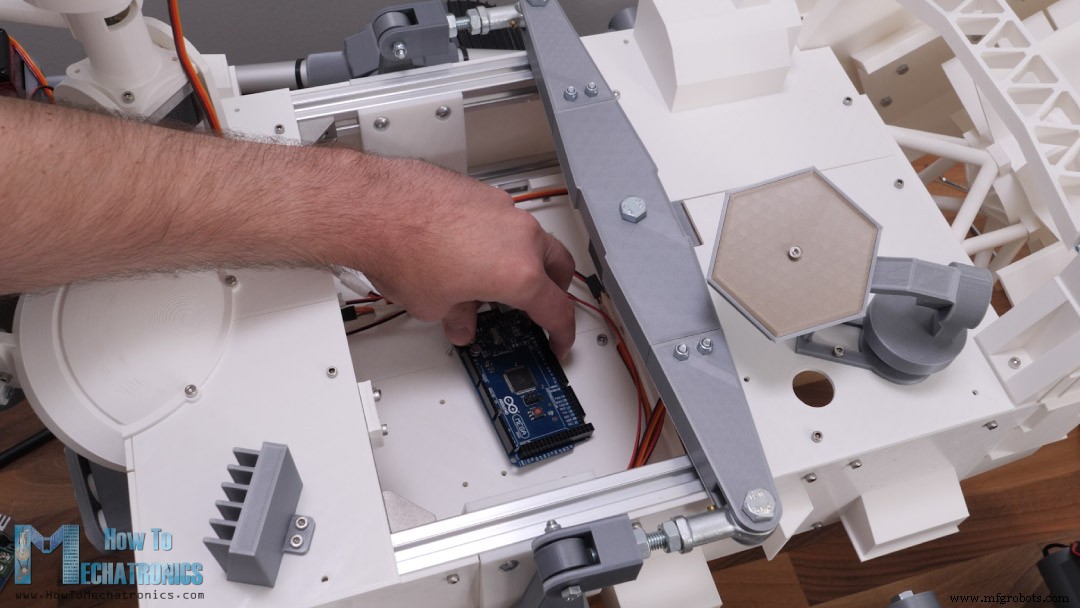
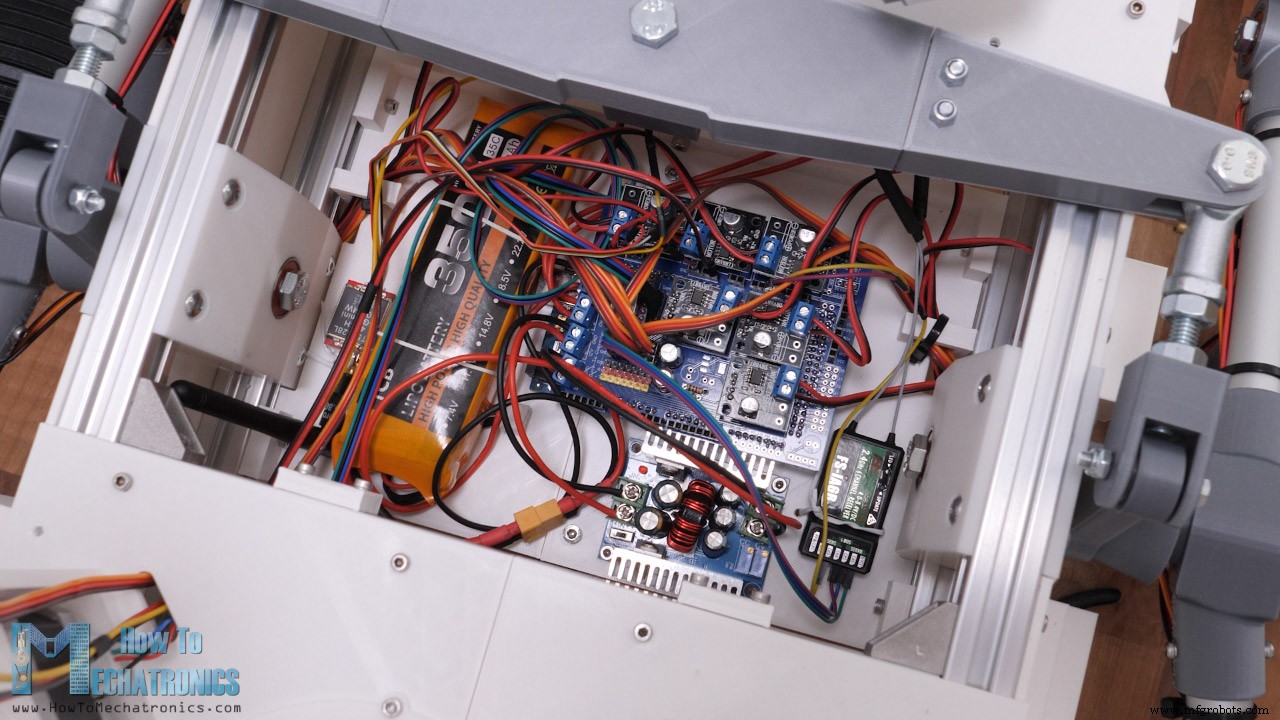
完成 PCB 组装后,我使用两个螺栓将 Arduino 板固定到电子安装部分,然后将 PCB 添加到其中。
然后我将每个电机连接到它们的驱动器并将它们放置在 PCB 中。伺服器进入它们相应的伺服引脚,以及步进驱动器,我使用一根跳线来选择 1/8 步进分辨率。
对于无线电通信,我使用的是 FLYSKY RC 发射器和接收器,价格实惠且效果很好。
要将接收器连接到 Arduino,我们可以使用伺服延长线,因为我们需要三根线,VCC、GND 和信号引脚。接收器通过 I-BUS 和串口与 Arduino 通信。如果我们想将数据从接收器发送回发送器,在我们监控电池电压的情况下,我们还需要将接收器的传感器 I-BUS 连接到另一个 Arduino 串行端口。
The buck convertor is secured in place using two bolts, and for securing the LiPo battery I’m using two rubber bands so in that way I can easily remove the battery for charging.
The power switch goes in the back right panel of the rover. I used 20-gauge wires for these connections as the current flow through them might get up to several amps when the rover is fully engaged. Make sure you double check your connections with these wires because if you connect something wrong you might fire up things.
Lastly, we can connect the FPV camera to a 12V power supply and connect video signal wire to the video transmitter which also needs to be powered with 12V. With this we are done with the electronics.
We can put back the cover panels in place and we are done with this DIY Mars Rover. Actually, we are almost done, as we need to give life to this machine now, or program the Arduino.
Here you can download the Arduino code for this DIY Mars Rover project:
Code overview
So, using the IBusBM library we read incoming data from the RC Transmitter.
Then we convert these values into a turning radius to right value, turning radius to left value and rover speed from 0 to 100%.
We use the turning radius “r” value for calculating the steering wheels angles as well as the speed of the wheels.
As I mentioned earlier, we are using the Ackerman steering geometry for calculating them. These values are then used for controlling the servos using the ServoEasing library which provides smoother servo movements.
For controlling the DC motors using the analogWrite() function which actually sends PWM signal to the DC motor drivers.
Overall, the code is not that complicated as the rover itself doesn’t have complicated functions. However, I do plan in future videos to add more functions to this rover, like GPS navigation, various sensors, robotic arm, soil collecting mechanism and so on.
I hope you enjoyed this project and learned something new.随时在下面的评论部分提出任何问题,并查看我的 Arduino 项目收藏。概览



DIY 火星探测器 3D 模型
3D 打印火星探测器复制品部件


DIY 火星车零件清单
组装漫游者
组装摇臂转向架悬架











为火星探测器组装电机




组装相机单元




组装漫游车的其余部分
电子


DIY火星车电路图
定制PCB


Programming the DIY Mars Rover – Arduino Code
// Reading the data comming from the RC Transmitter
IBus.loop();
ch0 = IBus.readChannel(0);
ch1 = IBus.readChannel(1);
ch2 = IBus.readChannel(2);
ch3 = IBus.readChannel(3);
ch6 = IBus.readChannel(6);Code language: Arduino (arduino)// Convertign the incoming data
// Steering right
if (ch0 > 1515) {
r = map(ch0, 1515, 2000, 1400, 600); // turining radius from 1400mm to 600mm
}
// Steering left
else if (ch0 < 1485) {
r = map(ch0, 1485, 1000, 1400, 600); // turining radius from 600mm to 1400mm
}
// Rover speed in % from 0 to 100
s = map(ch2, 1000, 2000, 0, 100); // rover speed from 0% to 100%Code language: Arduino (arduino)void calculateMotorsSpeed() {
// if no steering, all wheels speed is the same - straight move
if (ch0 > 1485 && ch0 < 1515) {
speed1 = speed2 = speed3 = s;
}
// when steering, wheels speed depend on the turning radius value
else {
// Outer wheels, furthest wheels from turning point, have max speed
// Due to the rover geometry, all three outer wheels should rotate almost with the same speed. They differe only 1% so we asume they are the same.
speed1 = s;
// Inner front and back wheels are closer to the turing point and have lower speeds compared to the outer speeds
speed2 = s * sqrt(pow(d3, 2) + pow((r - d1), 2)) / (r + d4);
// Inner middle wheel is closest to the turning point, has the lowest speed
speed3 = s * (r - d4) / (r + d4);
}
// speed value from 0 to 100% to PWM value from 0 to 255
speed1PWM = map(round(speed1), 0, 100, 0, 255);
speed2PWM = map(round(speed2), 0, 100, 0, 255);
speed3PWM = map(round(speed3), 0, 100, 0, 255);
}
void calculateServoAngle() {
// Calculate the angle for each servo for the input turning radius "r"
thetaInnerFront = round((atan((d3 / (r + d1)))) * 180 / PI);
thetaInnerBack = round((atan((d2 / (r + d1)))) * 180 / PI);
thetaOuterFront = round((atan((d3 / (r - d1)))) * 180 / PI);
thetaOuterBack = round((atan((d2 / (r - d1)))) * 180 / PI);
}Code language: Arduino (arduino)// Servo motors
servoW1.startEaseTo(97 - thetaOuterFront);
servoW3.startEaseTo(97 + thetaOuterBack);
servoW4.startEaseTo(94 - thetaInnerFront);
servoW6.startEaseTo(96 + thetaInnerBack);Code language: Arduino (arduino)// Motor Wheel 1 - Left Front
analogWrite(motorW1_IN1, speed2PWM); // PWM value
digitalWrite(motorW1_IN2, LOW); // ForwardCode language: Arduino (arduino)
制造工艺