

RoboDK 为任何机器人品牌发布直观的码垛插件
机器人软件公司 RoboDK 发布了一个新的码垛插件,用于对码垛应用程序进行直观编程,几乎兼容任何机器人品牌。它加速了这一通常繁琐的编程任务并提高了部署效率。
码垛是机器人自动化越来越普遍的应用。对于人类工人来说,将集装箱搬运到托盘上是一件乏味的事情,并且由于其重复性而增加了肌肉骨骼受伤的风险。
长期以来,机器人一直提供手动码垛的替代方案。但是,传统上对任务进行编程很乏味。
RoboDK 营销主管 Flore Cachera 说 “很多客户都要求使用此功能。码垛编程的所有繁重工作现在都由 RoboDK 完成。用户只需要设置托盘的位置。”
新的 RoboDK 插件可以立即与软件已经支持的数百种机器人模型一起使用。
为什么编程机器人码垛是一项枯燥的工作
机器人经常被用来让工人从枯燥和重复的工作中解脱出来。然而,机器人编程的常规选项使得部署码垛应用程序几乎与码垛本身一样乏味。
例如,一个可容纳 800 个箱子的托盘需要一个包含至少 1600 个点的机器人程序。创建此程序将是重复且耗时的。用户需要手动将每个盒子的位置教给机器人,或者硬编码一个脚本来为他们做这件事。
RoboDK 首席执行官 Albert Nubiola 解释说,机器人市场传统上在码垛应用方面是不平衡的。他说“一些机器人控制器提供内置的用户界面来快速设置码垛和卸垛项目。不幸的是,这不适用于所有机器人或控制器。 RoboDK 的码垛插件允许您使用任何机器人进行码垛。”
除了加快编程步骤外,新插件的另一个好处是用户可以离线编程任务。这消除了车间机器人编程导致的生产停机时间。
新的码垛插件的工作原理
RoboDK 用户现在可以使用码垛插件。可以通过下载最新更新来访问。
RoboDK 产品经理 Jeremy Brouillard 解释了它的工作原理:
“我们的目标是创建迄今为止对用户最友好的功能之一。
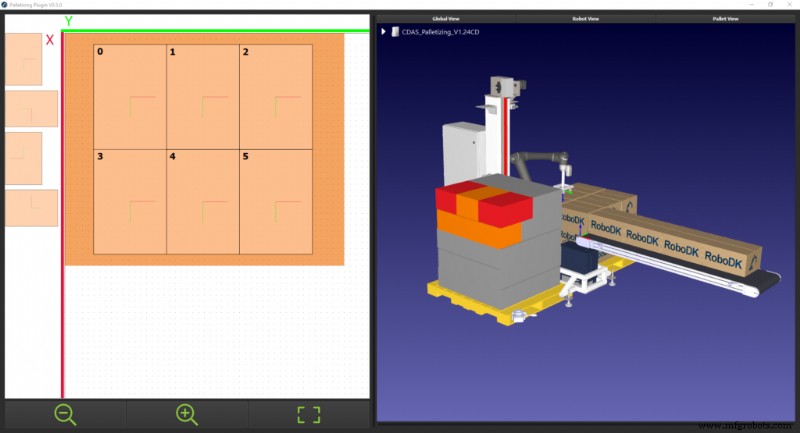
为了实现它,我们依赖于一个基本但高效的 2D 图形。您首先通过在屏幕上拖动您的框来创建您的托盘模式。然后,您可以堆叠您独特的盒子图案以形成您的托盘层。
剩下要做的就是模拟和生成程序。”
要使用该插件,用户只需打开一个菜单并逐步输入他们的托盘设置。然后,他们可以轻松地将每个盒子拖放到托盘每一层上的位置。 3D 可视化实时显示模拟,用户可以返回并调整设置,因此设置完全符合他们的所有要求。
Brouillard 补充道“任何使用机器人模拟或编程码垛应用程序的人都应该看看这个功能。这是一个真正的节省时间。”
未来计划
码垛只是 RoboDK 正在努力支持的几个高影响力应用之一,尽管他们还不想透露太多。
Cachera 解释说,这些添加是由用户反馈驱动的。她说“我们不是为自己创建机器人模拟软件,而是为我们的用户创建它。我们将继续听取他们的意见,并提供真正符合他们需求的新功能。最重要的是,我们将保持“RoboDK 风格”:保持灵活、易于使用并支持最大范围的机械臂。”
您对什么机器人应用感兴趣? 在下面的评论中告诉我们,或加入 LinkedIn、Twitter、Facebook、Instagram 或 RoboDK 论坛上的讨论。
工业机器人