

SnowPlow Robot
组件和用品
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
关于这个项目
为什么我想做一个扫雪机器人?因为我对让生活更轻松的解决方案不敏感,所以我考虑创建和提出一个解决方案的想法,可以帮助人们避免冬季寒冷的温度和使用传统手动铲的疲劳清除人行道上的积雪。为了做到这一点,我选择了一些有趣和技术性的东西。这样我决定开始开发一个遥控扫雪机器人,具有强大的机械、控制电子设备和强大的电动机。结果是一个微型版本的真正的扫雪机,带有毛毛虫、电动刀片(可以升高和移动)和安装在顶部的投影仪,可以在黑暗中照亮道路。机器人可以通过PlayStation遥控器进行遥控。
在下面的视频中,您可以看到扫雪机机器人的动作,有人告诉我,铲雪机机器人似乎必须进行助跑,事实并非如此 ,我制作了视频来展示如何清除积雪。
它是如何制作的?
该机器人由支撑电动刀片(可以升高和移动)的框架和由电动机、车轮和履带组成的牵引系统组成。底盘是用矩形截面钢筋焊接在一起实现的。机器人尺寸为600X375X240 mm,不包括刀片,重量约30 kg。
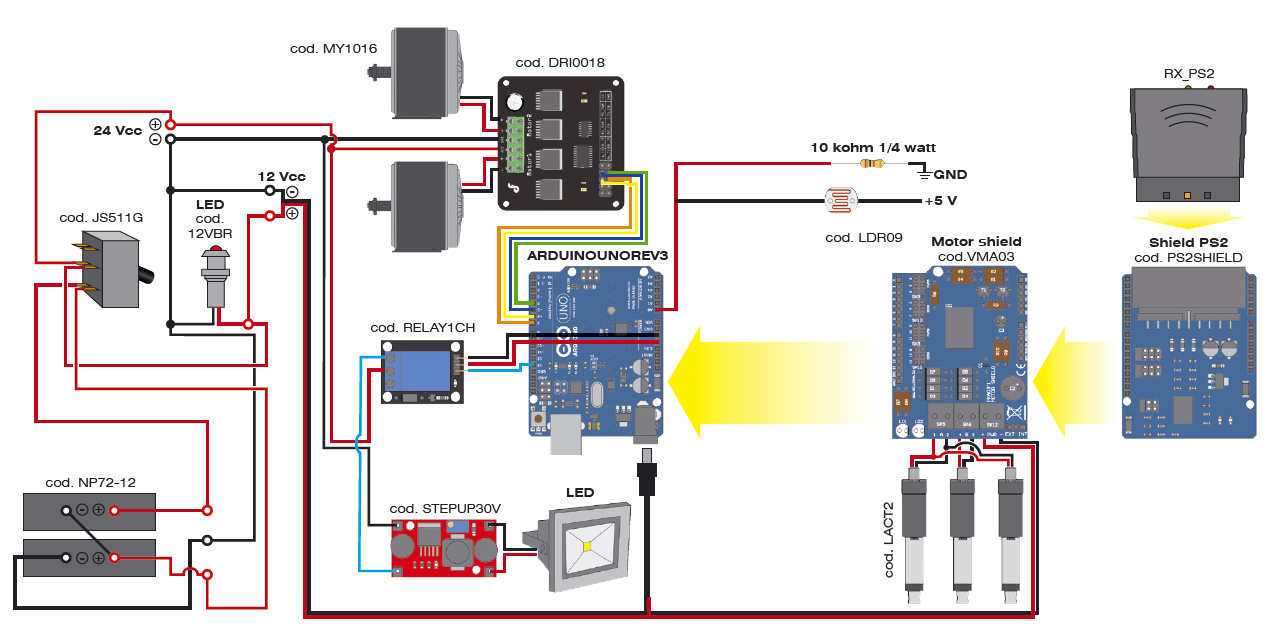

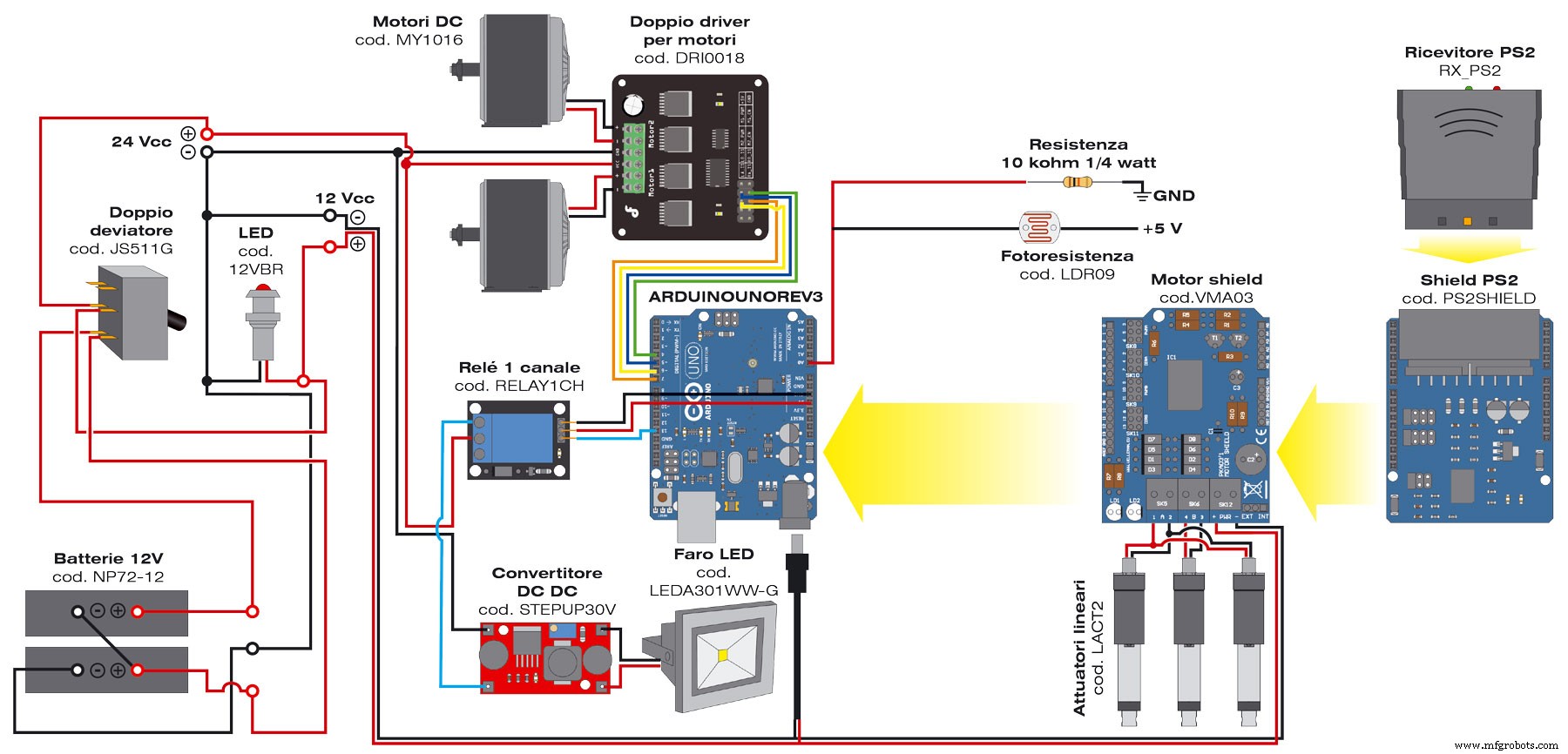
扫雪机的电气和电子部分基于 Arduino Uno,承载三个屏蔽并与:
- 电机驱动
- 中继板通道
- DC/DC 转换器升压
安装在 Arduino 上的防护罩是电机防护罩,用于控制管理刀片运动的三个线性电机和 PS2SHIELD,它允许您与 PlayStation 2 (PS2) 连接;后者需要 RX-PS2,它是一个 2.4 GHz 无线电接收器,用于从上述控制台发送/接收特定命令。您可以在这些页面中找到机器人的接线图;电源由两个 7.2 Ah 的铅胶电池串联而成:我们从两者的中点连接处取 12 V,而在串联的负极和正极之间,我们取 24 伏。一个开关(125V,2×15 安培)控制两条电源线。使用 12 伏电压,我们运行 Arduino,它将通过其引脚带为屏蔽供电; LED(内部安装限流电阻)将指示 Arduino 何时运行。
直接来自电池组的 12 伏电压也为电机屏蔽的电源部分供电。事实上,由于三个线性执行器 (cod. LACT2) 的吸收率很高,因此不建议从 Arduino 获取 12 V:您选择为适当的 PWR 端子提供外部电源。要使用外部电源,您必须将跳线(在屏蔽上)靠近终端,在中央和 EXT 之间移动。屏蔽的管理需要一个特殊的 Arduino 库,随组件一起提供。每个线性执行器由一个 12 Vdc 齿轮电机组成,使用蜗杆沿其长度来回移动轴(最大行程为 5 cm)。
执行器的动态负载为 50 kg,最大速度为 1.3 cm/s。不移动时最多可支撑约250公斤,扭矩确保即使在没有动力的情况下也能保持轴的位置。两个限位开关提供发动机在达到最大伸展和收缩时停止,而二极管在到达极限点后允许反向。执行器由金属制成并密封以防尘防水(IP63 等级)。
现在让我们转向 24 伏电源线,它为扫雪机的电源部分供电,它们是牵引和投影仪(可选)部分:第一个是基于电机驱动器,用四根电线连接到相同数量的 Arduino 数字线。电机驱动器为双桥功率驱动器,能够连续驱动两个有刷电机,最大电压为 35 VDC,电流为 15 A(每个)。
通过与 Arduino 接口并仅使用四个数字 I/O(2 个 PWM),您可以选择电机的旋转方向和速度。该电路有四个控制引脚、四个指示电机旋转方向的 LED、两个用于电路板电源 (5 Vdc) 的引脚和位于印刷电路后部的两个铝制散热器,用于散发运行过程中产生的热量全功率。
对于Arduino对驱动程序的管理,厂商提供了专门的库。输出接线端子允许您连接两个引擎,按照图所示进行连接(不要颠倒极性,否则轨道将反向运行!)使用截面至少为 1.5 平方毫米的电缆。关于控制输入,应该尊重 Arduino 和控制器连接器间距 2.54 之间的连接;使用厂商提供的库和我们的固件时需要的对应关系:如果你编辑它们,你必须修改连接。
请记住,DIR 是设置电机旋转方向的逻辑电平,PWM 是命令功率驱动器的 PWM 信号。要识别控制器连接器触点,只需参考电路板组件侧旁边可见的丝印即可。除了引擎控制器之外,24 伏电压将为 LED 投影仪的部分供电,您可以安装或不安装;如果已安装,请注意接线,并记住从继电器卡(编码 RELAY1CH)获取 24 V 正极。后者包含一个继电器和由 Arduino 通过数字 I/O 13 控制的相应驱动晶体管; Arduino 还通过 +5V 和接地 (GND) 为卡供电。
继电器允许打开和关闭投影仪,针对相应电路的动作。投影机设计为在 220 Vac 下运行,但是,由于机器人上没有此电压,为了避免使用逆变器,我们修改了投影机,打开它,移除 AC / DC 并直接连接电源 LED 的两根电线到转换器 DC / DC 的输出(编码 STEPUP30V);后者是具有可调输出电压的开关转换器,应该对其进行调整,以便为 LED 提供电流,使其工作在大约 10 瓦特。通常这是在大约 30 伏特下实现的。但是请记住,功率由乘积 VxI 给出(如果 V 以伏特为单位,I 以安培为单位,则获得电流与电压,以瓦为单位),然后到 30 V,电流消耗应略低于 340 mA。尽管该组 LED 具有内部过流保护,但 STEPUP30V 的输出电流限制为 2A,因此可以将其替换为配备输出电流限制的 DC/DC。
从遥控器接收数据是由Shield PS2SHIELD 完成的工作,制造商为此提供了特定的库。屏蔽执行命令的接收和解码;无线电部分留给 RX _PS2,它插入相关的连接器。最后要注意的是光敏电阻,Arduino 使用它来检测环境照明并控制板 RELAY1CH,从而打开 LED 投影仪;该组件通过 10 kOhm (1/4 W) 的电阻器馈送到分压器,并从模拟输入 A0 Arduino 读取。 5 伏电压取自 Arduino 5V。这个光传感器做了一件简单的事情:在良好的光照条件下,光敏电阻的阻值很低,Arduino微控制器的ADC读取的电压很低,不会触发继电器板;相反,黑暗会大大增加电阻,ADC 读取接近 5 伏的电压,这会导致投影仪开启。
构建说明
快速指南
代码
- 草图
草图Arduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
示意图
制造工艺