

蓝牙控制伺服
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
在这个项目中,我将向您展示如何借助智能手机应用程序通过蓝牙控制伺服电机。
对于这个项目,我们将使用带有 Arduino Uno 的蓝牙 HC-05 模块来控制伺服 9g。
--> 这个项目是如何运作的?
这个项目有两个部分:
1. android 应用程序 - 该应用程序将向我们的 HC-05 蓝牙模块发送各种数据包。 (点击此处下载应用程序)
(ps:这个应用不是我开发的。)
2.硬件——由HC-05蓝牙模块、Arduino Uno和伺服电机组成。
--> 这是它的工作原理 --
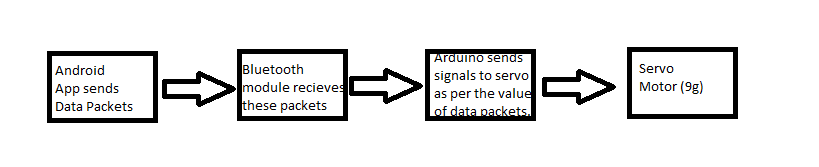
android 应用程序向蓝牙模块发送数据包。蓝牙模块通过串行通信将此数据包发送到 Arduino Uno。 Arduino Uno 被编程为根据数据包的值为伺服电机生成控制信号。这是一个流程图,以便更好地理解。
--> 如何开始
1. 下载安卓应用。 (点击这里)
2. 在Arduino uno上上传代码。
3. 进行连接。
请注意蓝牙HC-05模块需要连接3.3v而不是5v vcc,因为它会损坏模块。
4. 将蓝牙模块连接到 android 应用程序 - 当您启动硬件时,蓝牙模块将变得可见。因此,打开应用程序并单击查找附近的设备。选择 HC-05。一旦显示已连接,您就可以开始使用了!
您可以使用滑块或手动输入数值来控制伺服臂。
代码
- 蓝牙控制伺服
蓝牙控制伺服C/C++
此代码 id 上传到 Arduino uno.#include#include Servo x;int bttx=9; //蓝牙模块的tx连接到arduinoint的引脚9 btrx=10; //蓝牙模块的rx连接到arduinoSoftwareSerial蓝牙的10脚(bttx,btrx);void setup(){ x.attach(11); // 伺服连接到 arduino Serial.begin(9600) 的引脚 11; bluetooth.begin(9600);}void loop(){ if(bluetooth.available()>0) //如果蓝牙模块正在传输数据{ int pos=bluetooth.read(); // 将数据存储在 pos 变量中 Serial.println(pos); x.write(pos); //移动伺服头到给定位置}}
示意图
这就是必须制作电路的方式。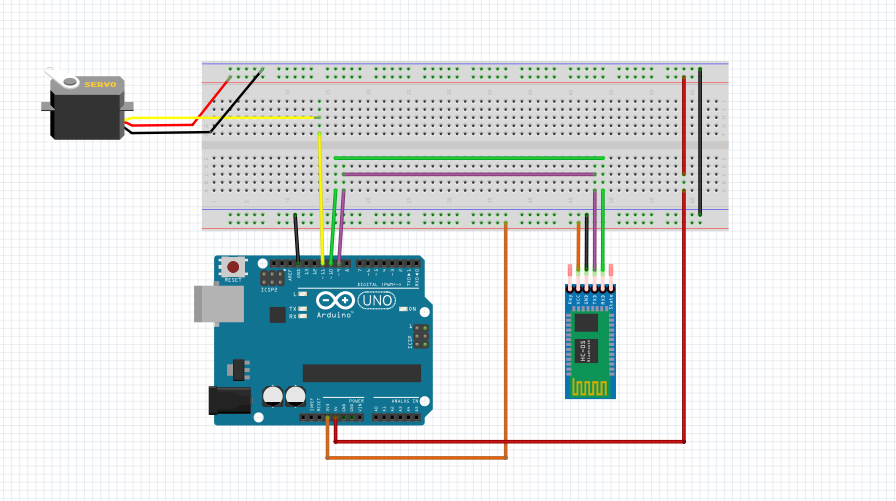
制造工艺