

Walbi,步行两足动物
组件和用品
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
必要的工具和机器
 |
|
应用和在线服务
 |
|
关于这个项目
如果我们能用一些伺服系统制造一个两足机器人,那不是很好吗?内心极客这么想,结果就是这样……
那是 Walbi,WALink BIped,这是我们为机器学习项目创建的机器人,该项目从未落地(Walbi 也没有,但那是因为它的双脚牢牢地踩在地上)。
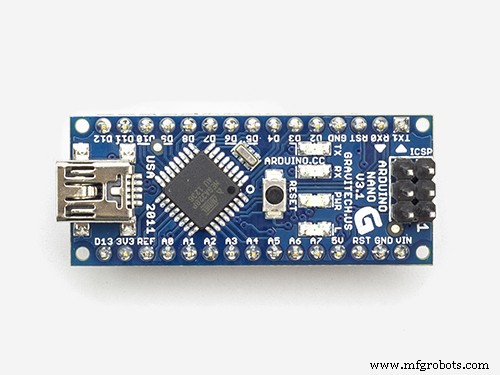
Walbi 将 Arduino Nano 用于“大脑”,LX-16A 伺服系统用于“肌肉”,塑料 3D 打印部件用于“骨骼”。 LewanSoul LX-16A 舵机是小型(ish)机器人项目的梦想舵机,因为它们很轻,可以移动超过 19 kg.cm 并通过一根电缆连接,从舵机到舵机,使机器人孩子的电缆连接玩。
Walbi 是一个 2:1 比例的人形生物,它的腿从脚跟到腰部高 55 厘米(21.7 英寸),重 1, 1 公斤(2.4 磅)。它身体的白色部分是 3D 打印出来的,但也很容易用轻质坚固的木头制成。
编程 Walbi 非常简单。您可以在下方下载进行动作捕捉和播放所需的两个程序,然后您就可以让Walbi 走、爬、爬、跳或跳舞!你只需要把它的腿移动到一个想要的姿势,记录那个姿势,把它塑造成另一个姿势,记录它等等,然后,当你记录完完整的序列后,你就可以坐下来观看它熟练的表演你教过的动作。
也许你可以教你的河舞😀
建造瓦尔比
Walbi 是用 PLA 塑料 3D 打印出来的,使用的是 FlashForge Creator Pro 打印机。您可以从 Thingiverse 下载 STL 文件,或者使用替代方法来构建脚、腿“骨骼”和腰部,使用木材或金属。舵机支架连接到这些部件、舵机和彼此之间。
您将需要四种不同类型的金属支架,以将伺服系统连接到打印的部件和彼此之间(更多信息和照片可在 Release The Inner Gook 博客中找到)。
接线
为了控制 LX-16A 舵机,您需要一个 LewanSoul 调试板。
它将从 Arduino Nano 上的串行端口接收命令。由于我们使用 Arduino 的硬件串行与计算机进行通信,因此我们使用 SoftwareSerial 库在 Nano 上创建了第二个串行端口,以便连接到调试板。
使用串行伺服系统可以最大限度地减少接线。每个舵机和下一个舵机之间都有一根电缆(随舵机提供串行电缆),腰部的舵机直接插入调试板。您的计算机连接到 Arduino 的 USB 端口,Arduino 使用三根跳线(TX、RX 和 GND)连接到调试板,这些跳线连接到您为 SoftwareSerial 配置的 Arduino 引脚——我们在代码中使用了引脚 10 和 1 .
舵机使用 115200 的波特率(如果您知道如何更改它,请告诉我们,因为这太高了)。 SoftwareSerial 的这个波特率很高,所以我们必须实现错误检查和重试功能。在某些情况下,需要坚持才能获得正确的读数。
电源
舵机可以在 7.4v 下提供 19.5kg.cm。我们使用了 6v,失速电流低于 3 安培。
编程
您可以在项目 Github 仓库中获取 Arduino 代码。
两个程序用于动作捕捉和回放,这种技术类似于电影中使用的技术。您首先将机器人塑造成一个姿势。由于舵机默认关闭电机,您可以手动旋转舵机。一旦机器人处于所需的姿势,您就可以使用 Walbi_record 程序读取和显示所有伺服角度。然后,您将这些角度读数输入 Walbi_play 中的poseAngles 变量,并使用该程序以使用timeToMove 变量设置的速度(以毫秒为单位)回放记录的姿势序列。
我们希望你喜欢这个项目。通过发表评论、订阅博客或任何其他类型的反馈行动,随时分享您的爱。我们很感激!
内在极客掘金队
以下是在创建 Walbi 时学到的一些技巧和窍门:
- LX-16A 的支架仅在一个位置连接到伺服系统,因此很容易错误地连接它们,特别是连接到 3d 打印部件。我们不得不重新组装 Walbi 几次,以纠正很难发现的组装错误。
- 舵机默认带有 ID 1。在将每个伺服器安装到机器人上之前为其分配不同的 ID,否则将无法与多个连接的具有相同 ID 的串行伺服器通信。
- 使用扎带确实可以改善外观
- 舵机随附将喇叭连接到舵机以及将喇叭连接到支架所需的螺钉。支架带有将它们连接到伺服系统所需的螺钉。您将需要单独购买用于支撑连接和塑料部件连接的支撑螺钉。我们使用了 DIN912 M2-6 和 M2-10 螺钉和螺母。
- 您可以通过将硅胶垫粘贴到机器人脚底来提高牵引力。
- 最好使用金属舵机喇叭,因为如果(当)腿在测试过程中相互碰撞时,舵机随附的塑料喇叭会撕裂。如果喇叭撕裂,机器人将获得松弛并且运动回放将失去准确性(否则这非常好)。
代码
用于运动控制和播放的Arduino程序
https://github.com/ptavaressilva/Walbi定制零件和外壳
用于 3D 打印部件的 STL
最初打印在 thingiverse.com 上的 Flash Forge Creator ProCAD 文件中制造工艺