

具有电容式触摸感应功能的 3D 打印假手
组件和用品
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
应用和在线服务
 |
|
关于这个项目
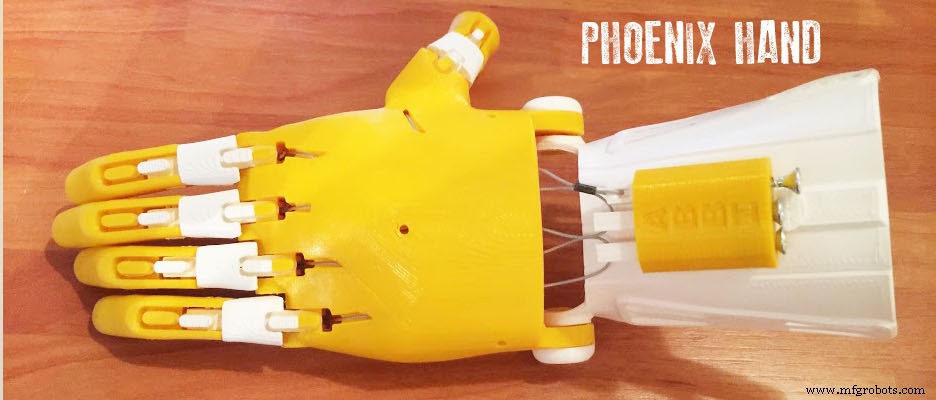
在这个项目中,我提出了一个可以应用于现有 3D 打印假手的想法。在现有的电动假肢中,我找不到电容式触摸传感技术的使用 用于手指动作 .这个项目结合了两个非常酷的东西,Arduino 带有电容式触摸感应,用于驱动和 e-NABLE Phoenix 手的混音 设计。
基本上,凤凰手是身体动力手。我在这个项目中所做的是通过选择所需的零件设计将其转换为电动假肢。
电容式触摸感应的优点是,通过触摸您可以轻松地启动手指。目前该模型无法控制单个手指,需要在承重能力和抓握能力方面进一步发展。
收集零件:
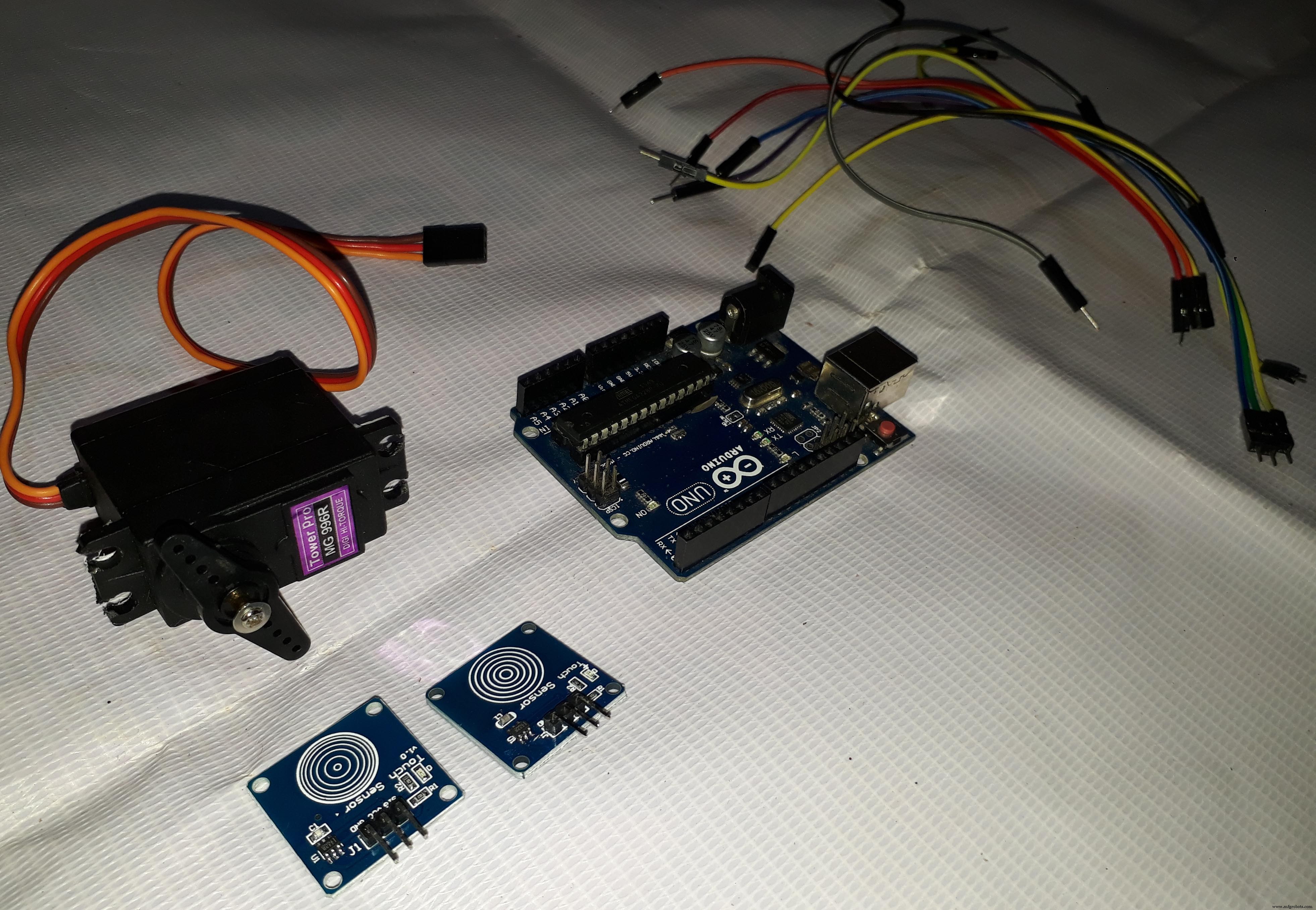
- Arduino Uno
- TTP223 触摸传感器 -2
- MG996R 伺服电机
凤凰手组装:
凤凰手的组装细节在以下步骤中提到...
我用屈肌作为钓鱼线 和像橡皮筋一样的伸肌
工具:
- 3D 打印机
- 胶枪
打印手:
该项目使用先前设计的 e-NABLE 凤凰手。
根据我的要求,我只打印了以下部分
手指
- finger_phalanx.stl -4 件
- fingertip_long.stl -2 件
- fingertip_short.stl -2 件
- thumb_phalanx.stl -1 块
- thumbtip.stl -1 块
棕榈
- palm_right_new_supports.stl -1 件
按扣
- fingertip_pin.stl - 4 件
- knuckle_pin_long.stl -1 件
- knuckle_pin_short.stl -2 件
- thumb_knuckle_pin.stl - 1 个
- thumbtip_pin.stl - 1 件
既然已经有详细的构建方法说明了,我就不赘述了
对于打印,我使用了 Flsun 3D 打印机。一共打印了10-12个小时
(注意:这些零件是右手用的)
手的组装:
凤凰之手的构建过程已经有了,就不赘述了。如果您有任何疑问,请发表评论。
我用屈肌做钓鱼线,伸肌做橡皮筋。
** 平滑拟合可能需要一些平滑
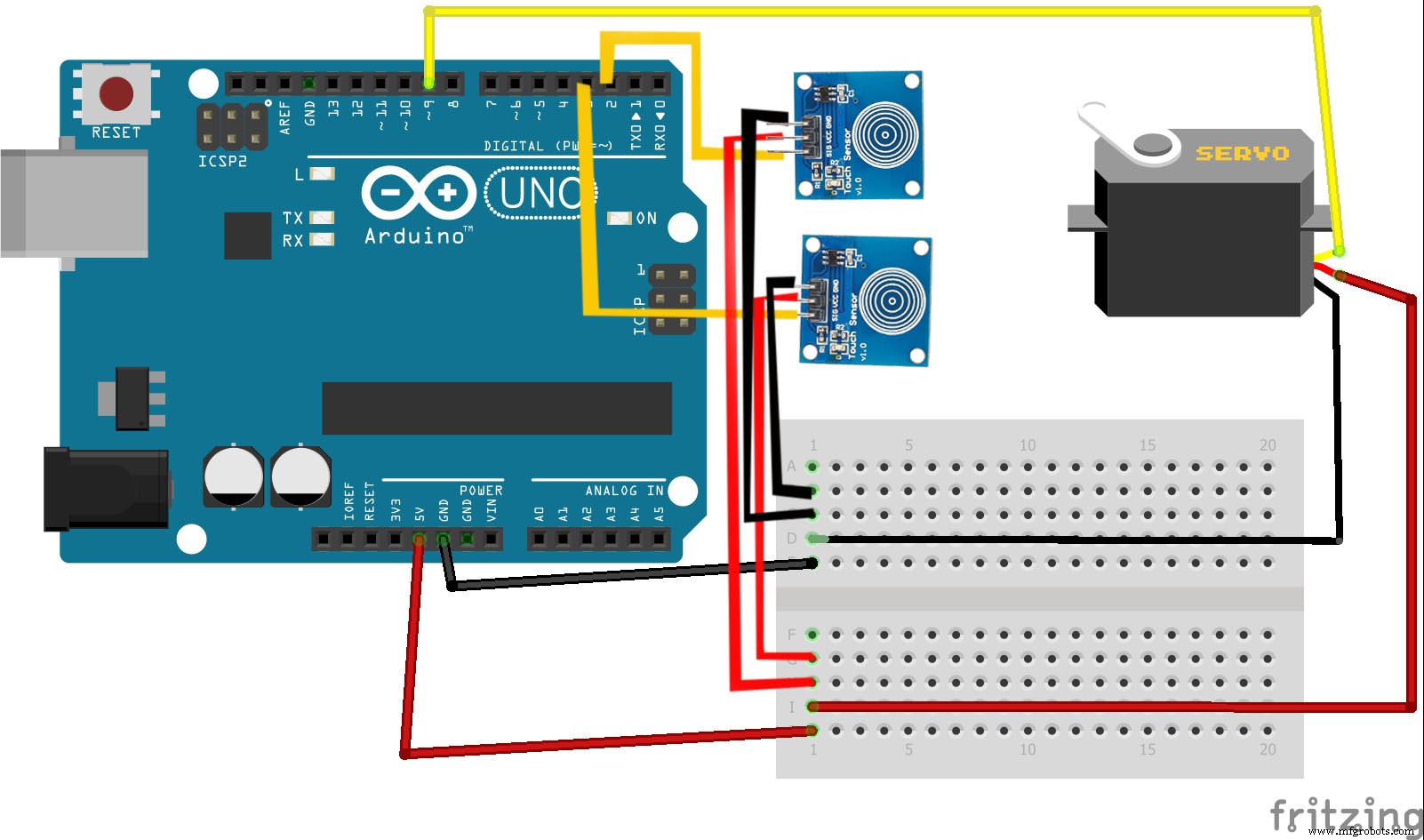
电子零件:
驱动由2个触摸传感器(TTP223)控制,来自触摸传感器的输入通过伺服电机打开和关闭手指。
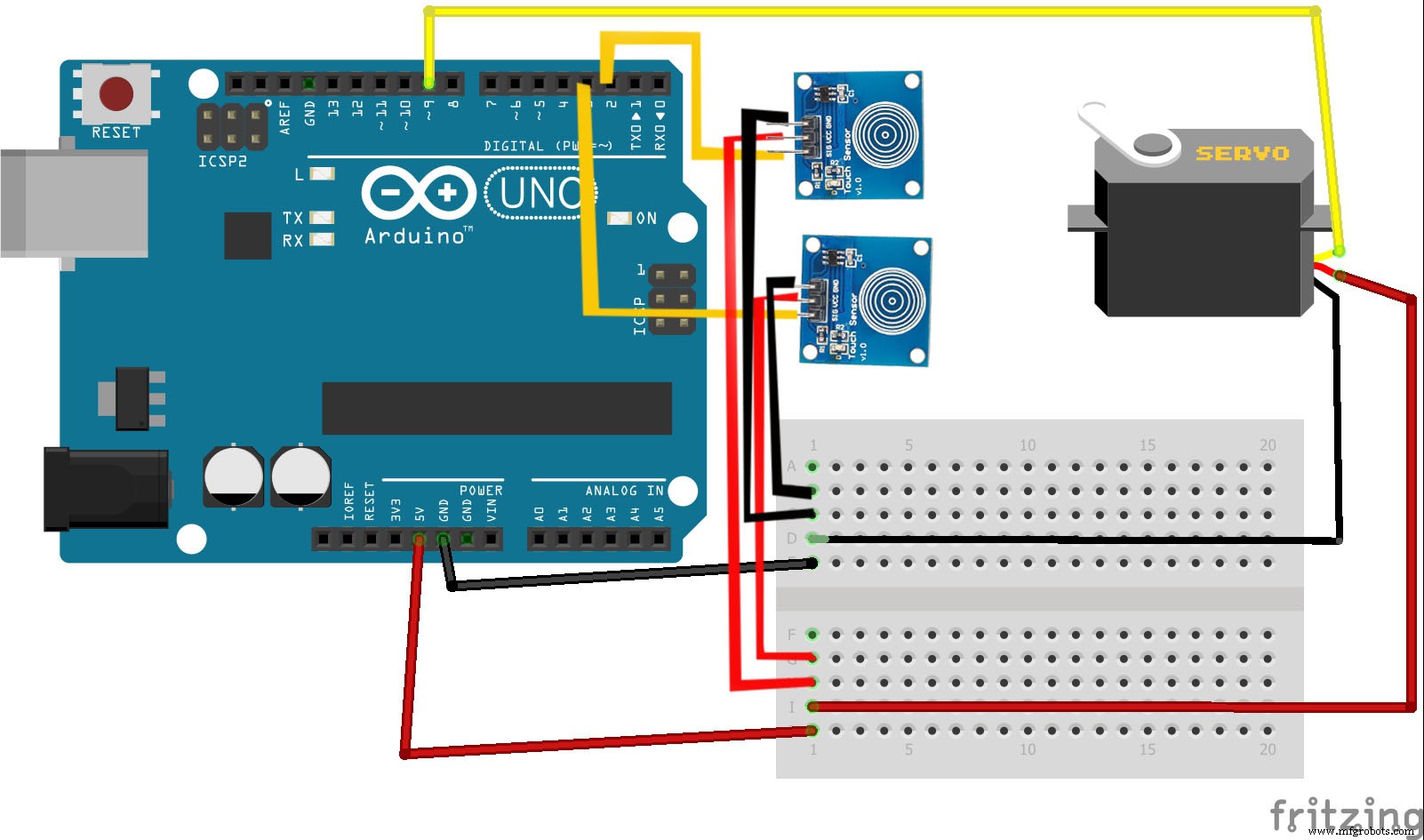
电路图和Arduino代码:
快乐 制作!
非常感谢您的阅读,如果您需要更多信息,请随时在评论中提问,我会尽力为您解答。
代码:
#include Servo myservo; #define CTS1Pin 2 // 电容式触摸传感器 1 的引脚#define CTS2Pin 3 // 电容式触摸传感器的引脚 2int pos;void setup() { myservo.attach(9); // 将引脚 9 上的伺服连接到伺服对象}void loop() {int CTSValue1 =digitalRead(CTS1Pin);int CTSValue2 =digitalRead(CTS2Pin);if (CTSValue1 ==HIGH){ for (pos =0; pos <=180; pos +=1) myservo.write(pos);延迟(15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos);延迟(15); }} 代码
- Arduino 草图
Arduino SketchArduino
#includeServo myservo; #define CTS1Pin 2 // 电容式触摸传感器 1 的引脚#define CTS2Pin 3 // 电容式触摸传感器的引脚 2int pos;void setup() { myservo.attach(9); // 将引脚 9 上的伺服连接到伺服对象}void loop() {int CTSValue1 =digitalRead(CTS1Pin);int CTSValue2 =digitalRead(CTS2Pin);if (CTSValue1 ==HIGH) { for (pos =0; pos <=180; pos +=1) myservo.write(pos);延迟(15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos);延迟(15); } }
示意图
制造工艺