

最简单的跟随机器人
组件和用品
 |
| × | 1 | |||
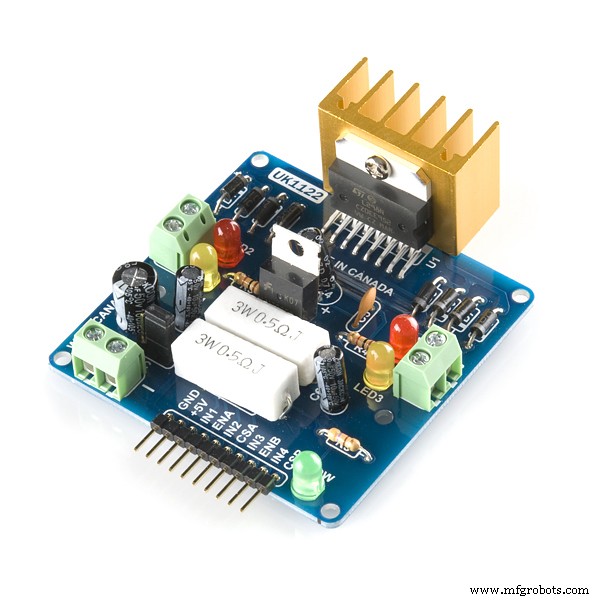 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 |
必要的工具和机器
 |
| |||
| ||||
|
应用和在线服务
 |
|
关于这个项目
Line Follower 机器人是机器人领域的你好世界。这个线跟随器非常简单,易于构建机器人。
代码
- 基于Arduino的跟随机器人
基于Arduino的跟随机器人C/C++
/*-------定义输入------*/#define LS 2 // 左传感器#define RS 5 // 右传感器/*-------定义输出- -----*/#define LM1 11 // 左马达#define LM2 10 // 左马达#define RM1 9 // 右马达#define RM2 6 // 右马达空隙 setup(){ pinMode(LS, INPUT); pinMode(RS,输入);引脚模式(LM1,输出); pinMode(LM2,输出); pinMode(RM1,输出); pinMode(RM2, OUTPUT);}void loop(){if((digitalRead(LS)==LOW) &&(digitalRead(RS)==LOW)) // Condition_1 停止{ MoveForward(); } if((digitalRead(LS)==HIGH) &&(digitalRead(RS)==HIGH)) //CONDITION-2 FORWRD { Stop(); } if((digitalRead(LS)==LOW) &&(digitalRead(RS)==HIGH)) // RIGHT { TurnLeft(); } if((digitalRead(LS)==HIGH) &&(digitalRead(RS)==LOW)) { TurnRight(); }}void MoveForward(){analogWrite(LM1, 50);模拟写入(LM2,0);模拟写入(RM1,50);模拟写入(RM2,0);延迟(20);}无效转右(){模拟写入(LM1,0);模拟写入(LM2,60);模拟写入(RM1,60);模拟写入(RM2,0);延迟(30); }void TurnLeft(){analogWrite(LM1, 60);模拟写入(LM2,0);模拟写入(RM1,0);模拟写入(RM2,60);延迟(30);}无效停止(){模拟写入(LM1,0);模拟写入(LM2,0);模拟写入(RM1,0);模拟写入(RM2,0);延迟(20);} 示意图
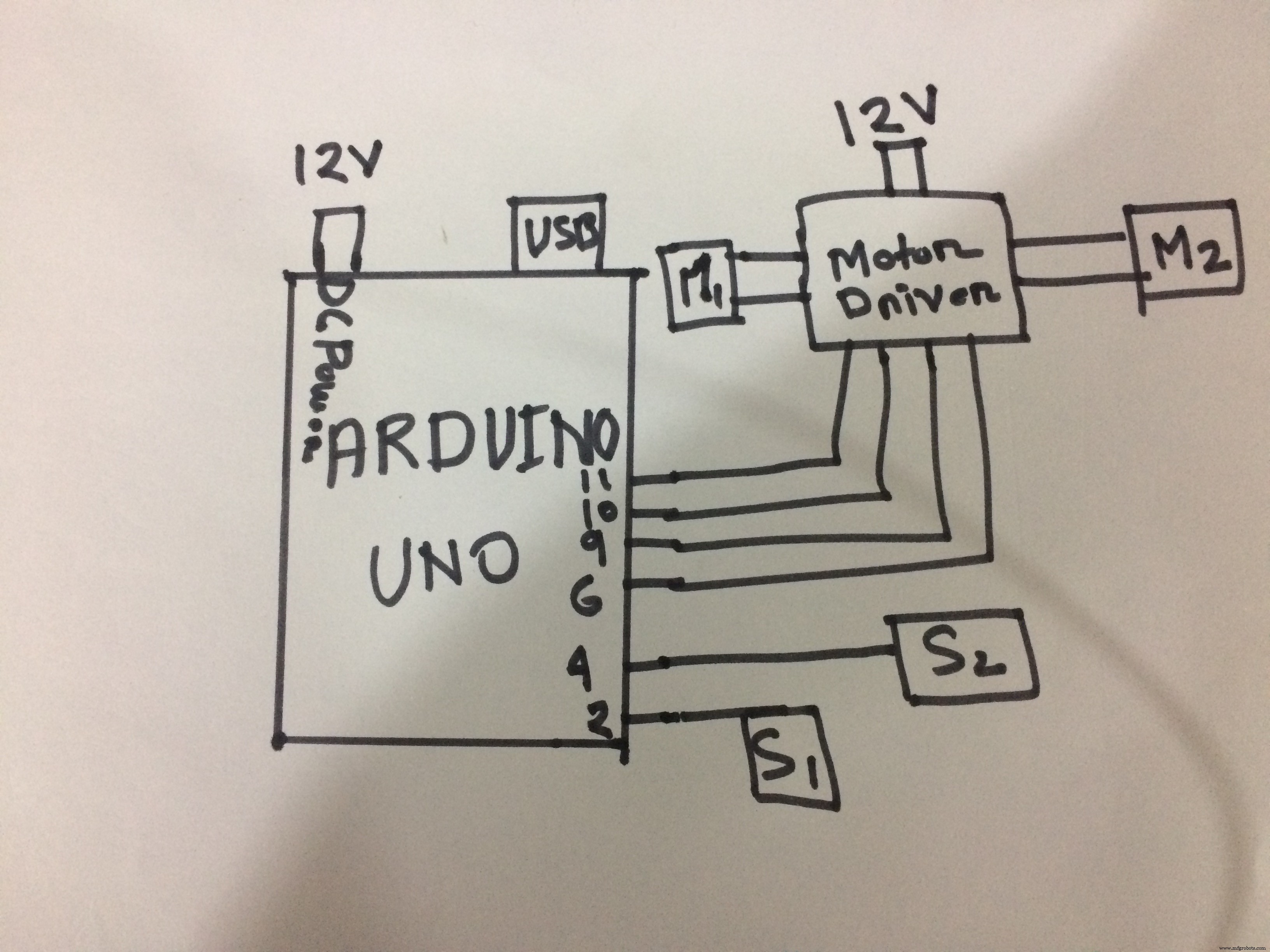
制造工艺