

基于柔性聚(偏二氟乙烯)压电薄膜的超灵敏应变传感器
摘要
基于柔性压电聚(偏二氟乙烯)(PVDF)薄膜,已经展示了具有 16 个微型电容单元的柔性 4 × 4 传感器阵列。 PVDF 的压电性和表面形态通过光学成像和压电响应力显微镜 (PFM) 检查。 PFM 显示相位对比,表明 PVDF 和电极之间的界面清晰。机电性能表明该传感器具有出色的输出响应和超高的信噪比。输出电压与外加压力呈线性关系,斜率为 12 mV/kPa。保持和释放输出特性在不到 2.5 μs 的时间内恢复,显示出出色的机电响应。此外,通过理论模拟研究了相邻阵列之间的信号干扰。结果表明干扰随着压力以 0.028 mV/kPa 的速率降低而减少,电极尺寸具有高度可扩展性,并且在 178 kPa 以下的压力水平下变得不显着。
背景
聚偏二氟乙烯 (PVDF) 是一种化学性质稳定的压电聚合物材料,因其热电、压电和铁电特性而在不同领域有许多应用 [1, 2]。特别是,由于出色的机械性能(杨氏模量 2500 MPa 和断裂点强度 ~ 50 MPa),基于 PVDF 的压力传感器显示出良好的机械性能,如柔韧性和抗疲劳 [3, 4]。与常用的基于铁电 PZT 系列材料的压力传感器相比,基于 PVDF 的压力传感器无毒且具有生物相容性 [5, 6]。最重要的是,基于 PVDF 的传感器比基于 PZT 的传感器更柔软和坚韧,这是由于 PVDF 薄膜的高柔韧性系数,可以制成复杂应变传感所需的形状 [7, 8]。因此,在生物医学领域的快速发展中,基于 PVDF 的压力传感器被认为是潜在的柔性生物传感器之一,用于压力表征 [9, 10]。夏尔马等人。设计了一种带有PVDF薄膜的智能导管压力传感器;它可以集成到导管上进行实时压力测量 [11]。巴克等人。开发了基于PVDF的脉搏波传感器系统,用于非侵入式测量驾驶员手掌的心脏脉搏波信号;结果表明,传感器系统可以为心率变异性分析提供清晰的脉搏波信号,可用于检测驾驶员的警惕状态,避免交通事故[12]。李等人。制造了具有 PVDF 和 ZnO 纳米结构的传感器,它可以检测人造皮肤的压力和温度变化 [13]。然而,该传感器只能检测大尺寸的单个点的压力。
实际应用,例如用于检测人体压力的贴片生物传感器,需要多点传感、结构灵活性和超高灵敏度 [14,15,16]。在这项报告的工作中,展示了基于压电 PVDF 薄膜的 4 × 4 柔性传感器阵列,显示出 12 mV/kPa 的超高灵敏度和 2.5 μs 的快速输出响应。表征了施加在人手指上的压力的大小和空间分布。
设计和实验
传感器阵列的设计和制造
所提出的传感器阵列具有基于 PVDF 薄膜的夹层结构,厚度约为 50 μm(中国锦州科信公司)。厚度为 20 μm 的铝电极阵列覆盖在 PVDF 薄膜的两侧。图 1a 显示了传感器的示意图设计。传感器有16个微电容单元;每4个单元共用一根连接线,最大限度地减少电极线的数量。
<图片>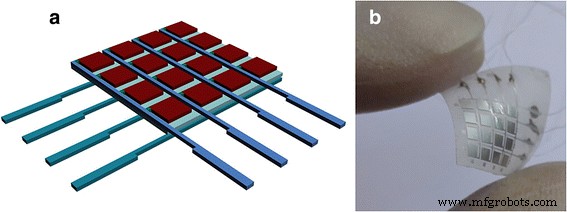
一 传感器阵列示意图。 b 终极设备实物图
为了制造传感器阵列,制备了覆盖有聚二甲基硅氧烷 (PDMS) 的载玻片作为刚性基板。将两面由铝覆盖的 PVDF 薄膜加载到基板上。然后,将光刻胶以 3000 rpm 的速度旋涂在薄膜表面,时间为 40 秒。通过掩模对准系统(ABM,Inc.,USA)对Al进行光刻和湿法蚀刻后,制备出16个具有4 × 4方形结构的电容器单元。之后,从载玻片上拾取 PDMS 基板上的柔性传感器。每个电容器的电极通过银胶与导线连接。为了获得良好的生物相容性,传感器通过在顶部覆盖 PDMS 并在 60°C 下加热 12 小时进行封装。图 1b 显示了弯曲压力传感器的照片,说明传感器是灵活的。
基于PVDF薄膜的传感器阵列的压电特性
进行了压电响应力显微镜 (PFM) 研究(Seiko, Inc., Japan)以表征所提出的传感器的 PVDF 薄膜在 2 V 的交流偏置电压下的表面形态和压电特性,扫描区域尺寸为 2 × 2 μm 2 .
传感器阵列校准
为了校准传感器,在连接到 National Instruments 数据采集 (DAQ-USB6008) 设备的机电实验平台中,对提议的传感器施加了各种压力。四个差分模拟信号的数据采集设置为差分模型。该传感器的输出电压信号是通过改变传感器阵列和数据采集器之间的连接获得的。
结果与讨论
图 2a 显示了蚀刻 Al 后传感器的表面形态,通过光学显微镜检查。相当亮和暗的对比表明 PVDF 和蚀刻的铝电极之间有一个清晰的界面。图 2b、c 显示了压力传感器 PVDF 薄膜的表面形态和相位信号。表明PVDF表面光滑,具有组织结构。图 2c 中 PFM 测量的相位图像显示了压电域的强烈响应,这与图 2b 中看到的表面结构一致。这些结果表明,所制备的基于 PVDF 薄膜的传感器表现出良好的压电性。
<图片>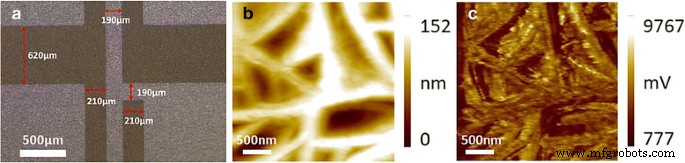
一 蚀刻技术后所提出的传感器的表面形态。 b 表面形态和c 传感器PVDF薄膜的相位PFM图像
当在传感器的方形电极之一上施加 98.1 kPa 的恒定压力时,输出信号的典型结果如图 3a 所示 [17]。 x -axis 和 y -轴分别显示传感器方形电极的时间和输出电压。输出电压由传感器的 PVDF 薄膜产生的电荷 (Q) 转换而来。基于压电方程(其中 d 33是极化方向与电场方向相同时的压电常数,FZ表示对z施加压力 -direction 与 d 的方向相同 33),可以建立输出电压和压力之间的关系。原始数据是通过应用 49-51 Hz 的波段块获得的。该图的箭头线表示由施加在传感器上的压力产生的大约 123.1 mV 的信号。压力传感器的输出电压在低噪声、高信噪比的信号中清晰显示。为了确认传感器阵列的同步特性,同时在传感器的四个单元上施加 113.2 kPa 的等压。压力感应的输出电压信号如图 3b 所示。同时从传感器的四个单元获得几乎相同的约 190 mV 的输出值,这表明传感器阵列通过施加多点压力表现出高稳定性和同步性。为了校准传感器阵列,在传感器阵列上施加了 60-150 kPa 范围内的不同压力;获得了输出电压与施加的压力的关系,并将其绘制为图 3c 中所示的校准曲线,该曲线表现出线性关系。线性曲线的斜率约为2.9 mV/kPa,校准曲线存在- 159.2 mV的偏移。
<图片>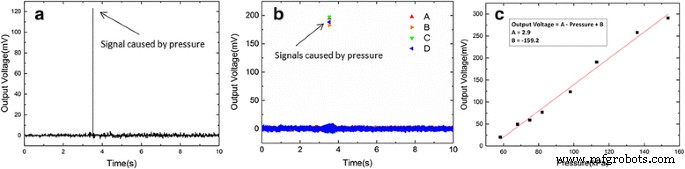
a 的过滤输出电压 一个电极方块和b 传感器阵列的四个电极方块。 c 所提出传感器的线性校准曲线拟合
传感器的一个方形电极的保持和释放输出响应是通过施加不同频率的脉冲压力获得的。图 4a 中绘制的曲线显示了通过以 90 Hz 的频率施加约 75.1 kPa 的脉冲压力时传感器的典型响应。正输出电压对应传感器阵列电极方块的压缩,负输出电压对应于弛豫。如图 4a 的插图所示,在裸压电 PVDF 薄膜中也观察到类似的保持和释放输出响应 [18]。传感器输出电压的响应时间小于2 ms,表明该传感器表现出良好的机电响应特性。在传感器阵列上施加 60-150 kPa 范围内的脉冲压力。保持和释放输出响应曲线如图 4b 所示。该传感器在不同压力下表现出稳定的机电响应特性,响应时间约为2 ms,传感器在不同压力下的输出电压与上述得到的线性校准曲线一致。
<图片>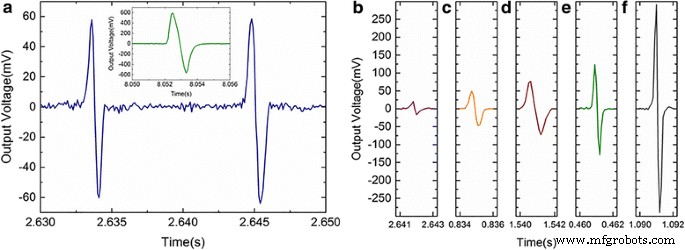
a 压力的保持和释放输出响应 75.1 kPa,b 58.2 kPa,c 67.8 kPa,d 81.9 kPa,e 98.1 kPa 和 f 153.6 千帕;插图显示了从裸 PVDF 薄膜获得的保持和释放输出响应
接下来,研究压力在选择点上的应用。当对其中一个阵列的电极施加压力时,相邻阵列之间会出现信号干扰。信号干扰仿真是通过 COMSOL Multiphysics 在阵列上进行的。每个电极面积为 1.4 mm 2 .该结构的几何形状如图 5a 所示。在电极 A 上施加压力时的附加应变如图 5b 所示,表明应变随着远离电极 A 的距离而增加。研究了 20~80 kPa 的压力水平对电位差的干扰,如图 5b 所示图 5c。电位差与压力呈线性关系,斜率为 0.028 mV/kPa,截距为 5 × 10 -4 mV,表示极低水平的干扰。低于 178 kPa 的压力会产生小于 5 mV 的信号干扰,可以忽略不计 [16, 17]。此外,已经研究了干扰对阵列电极尺寸的依赖性。图 5d 显示了电极尺寸为 1.2、1.0 和 0.8 mm 2 的结果 .这表明在最小的电极中仍然可以观察到干扰电位差与压力(在 20~60 kPa 范围内)之间的线性关系。三种结构的界面电压拟合斜率分别为 0.01748、0.01181 和 0.00574 mV/kPa,观察到在较小电极尺寸下干扰电位降低。
<图片>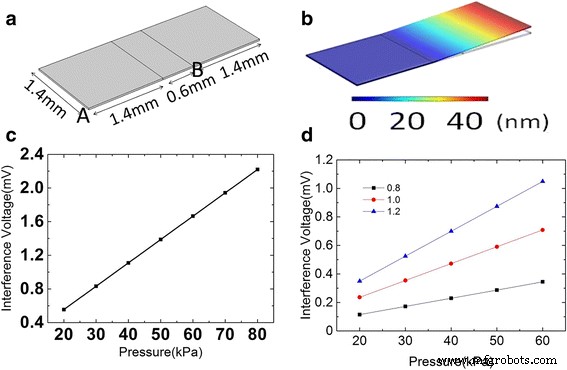
一 用于理论模拟的物理尺寸。 b 位移和 c 干扰电压和外加压力之间的线性曲线拟合,阵列尺寸为 1.4 毫米。 d 分别使用 0.8、1.0 和 1.2 毫米的阵列尺寸获得结果
为了一个简单的实际应用,该传感器用于测量人手手指的压力状态和分布。众所周知,复杂的手指运动包括一些基本技能,如指压、揉捏、揉搓、摩擦等[19]。在我们的实验中,选择了三种最常用的动作包括指压、揉捏和摩擦来测试手指的压力状态和分布。图 6 分别显示了在手指的三个移动过程中由传感器表征的拇指压力分布的快照。在图 6a 中,可以清楚地看到,在指压运动期间,76 kPa 的压力集中在拇指手指的中心,这与图 6b、c 中分别看到的揉捏和摩擦有很大不同。图 6b 显示了在揉捏运动过程中拇指指前部的压力高于手指其他部分,而在摩擦运动过程中拇指指的压力相当均匀(约 68 kPa),如图 6 所示。 6c。观察到的手指压力分布与之前临床观察中的报告有些相似 [17, 20]。根据我们的测量,基于柔性铁电 PVDF 薄膜的应变传感器被证明对表征复杂的手指运动非常敏感。通过使用所提出的传感器,有望更精确地探索人类手指的技能,也有助于未来开发替代人类手指的机器人。
<图片>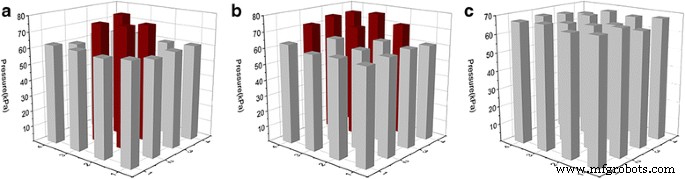
由所提出的传感器表征的拇指手指运动的压力状态和分布:a 指压,b 揉捏,和c 擦
总之,基于压电 PVDF 薄膜的 4 × 4 传感器阵列具有 16 个电容器单元已经被制造并用 PDMS 封装。传感器阵列表现出灵活和高灵敏度的特性。通过施加不同频率的脉冲压力获得传感器的保持和释放输出响应,这表明当施加 60-150 kPa 范围的压力时,传感器阵列可以在 2 ms 内产生 20-300 mV 的电压信号。使用所提出的传感器观察到了人手手指运动过程中手指的明显不同压力分布,有望更精确地探索人手的技能。
缩写
- PFM:
-
压电响应力显微镜
- PVDF:
-
聚偏二氟乙烯
纳米材料