

在杂乱场景中识别物体的人工智能系统
机器人视觉已经走过了漫长的道路,在自动驾驶和物体操纵等复杂且要求苛刻的任务中的应用达到了一定水平。但是,它仍然难以识别杂乱场景中的单个对象,其中一些对象部分或完全隐藏在其他对象后面。通常,在处理此类场景时,机器人视觉系统被训练为仅基于其可见部分来识别被遮挡对象。但是这样的训练需要大量的对象数据集并且可能很乏味。
副教授 Kyoobin Lee 和博士来自韩国光州科技学院的学生 Seunghyeok Back 在开发人工智能系统以识别和分类杂乱场景中的物体时发现自己面临着这个问题。 “我们希望机器人能够识别和操纵他们以前没有遇到过或接受过识别训练的物体。然而,实际上,我们需要手动收集和标记数据,因为深度神经网络的泛化性在很大程度上取决于训练数据集的质量和数量,”Back 说。
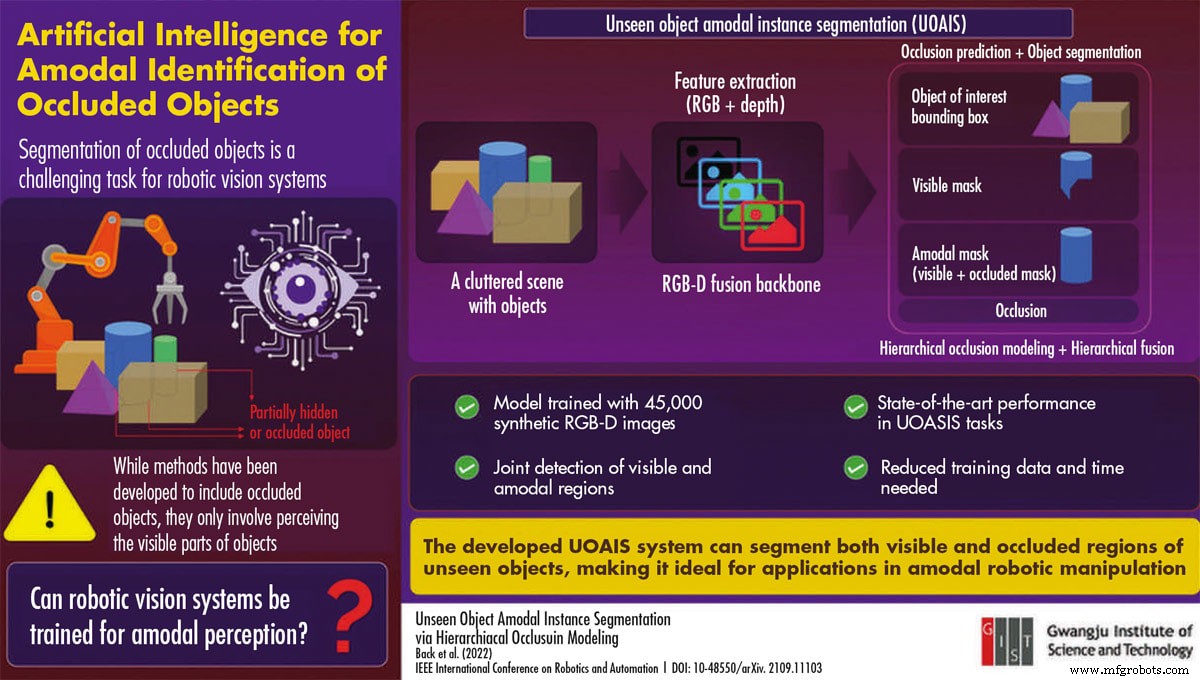
在由 Lee 和 Back 教授领导的一项新研究中,他们开发了一种称为“看不见的对象非模态实例分割”(UOAIS) 的模型,用于检测杂乱场景中的遮挡对象。为了训练模型识别物体几何形状,他们开发了一个数据库,其中包含 45,000 张包含深度信息的逼真合成图像。有了这个(有限的)训练数据,该模型能够检测到各种被遮挡的物体。在遇到杂乱的场景时,它首先挑选出感兴趣的对象,然后通过将对象分割成“可见蒙版”和“无模蒙版”来确定该对象是否被遮挡。
研究人员对结果感到兴奋。 “以前的方法仅限于仅检测特定类型的对象或仅检测可见区域而无需明确推理遮挡区域。相比之下,我们的方法可以像人类视觉系统一样推断被遮挡物体的隐藏区域。这可以减少数据收集工作,同时提高复杂环境中的性能,”Back 说。
为了在他们的系统中启用“遮挡推理”,研究人员引入了“分层遮挡建模”(HOM)方案,该方案为多个提取特征及其预测顺序的组合分配了一个层次结构。通过针对三个基准测试他们的模型,他们验证了 HOM 方案的有效性,实现了最先进的性能。
研究人员对他们的方法的未来前景充满希望。 “在杂乱的环境中感知看不见的物体对于模态机器人操作至关重要。我们的 UOAIS 方法可以作为这方面的基线,”Back 说。
如需更多信息,请联系光州科学技术学院 Seulhye Kim,该电子邮件地址已收到反垃圾邮件插件保护。您需要启用 JavaScript 才能查看它。 82-627-156-253。
自动化控制系统