

技术如何改变机器人制造
简介:警告这可能会让你觉得自己老了
我的名字是史蒂夫斯帕诺,我的第一个电子项目是在我 4 岁时将电池、两根电线和一个手电筒灯泡连接在一起。从大约 6 岁到 16 岁,我在德州仪器 TI-994A、Commodore C64、Amiga 2000 和 IBM 386 等计算机上自学了各种编程语言(汇编、基础甚至 C)。我还构建了几个 Heathkit电子项目,例如“固态”无线电接收器套件。你们当中有多少人听说过 Heathkit?

我真的很想要 Heathkit HERO 1 机器人,它的超声波物体检测、可移动手臂和 8 位中央处理器非常复杂。它甚至带有无线电遥控键盘,因此您可以直接在十六进制汇编中对其进行编程!你能想象吗?用键盘直接用十六进制编程,根本没有调试器?惊恐的事件!令人惊讶的是,这个小机器人在 Ebay 上的售价仍然为 1500 美元。我应该买一个——我一直想要一个——它太可爱了!

多年以来,在互联网出现之前,如果你能想象这样的时间,我什至在一个名为“Inter-Dimension”的 9600 波特调制解调器上运行“BBS”服务,我们在这里交换消息和 Commodore/Amiga 软件。我当时的电脑梦想是存 2000 美元(1995 年对于一个 16 岁的孩子来说是一笔巨款),为我的 Amiga 2000 购买一个 10 兆字节的硬盘。如果我能拥有那个硬盘,我会拥有最好的基于调制解调器的 BBS!
我在宾夕法尼亚州斯克兰顿(美国)长大,就读于电气工程学院(斯克兰顿大学),并获得了纽约州立大学控制系统专业的电子工程硕士学位。我放学后的第一份 EE 工作是为收银机和零售应用中使用的热敏打印机设计硬件。我在 1998 年的第一份 EE 工作中的主要项目是帮助将公司的产品从 8 位 Intel CPU 升级到具有 16 位内存总线的全新 32 位 50 MHz 处理器。这是一个涉及软件、硬件和机械工程团队的大型项目。我的第二份 EE 工作是在一家设计存储区域网络系统的公司工作。那是在 2001 年,这家公司的大项目是帮助设计一系列支持全新 2 Gbit/s 光纤通道接口的 SAN 系统。这真的很快,2001 年光纤上的 2Gbit/s!技术怎么能比这更好?
1997 年高级项目
我发现了 ElectronicsLovers 页面 在 Instagram 上,管理员正在寻找“高级项目”论文以在他们的页面上突出显示。没有指定日期,所以我想我会从 1997 年开始提交我的大学四年级论文,主要是为了有趣地提醒一下技术是如何变化的。
当我 1997 年在斯克兰顿大学完成 BSEE 学位时,我们大四的项目是设计一个可以在迷宫中导航的自主机器人。我立刻想到了 Heathkit HERO1;现在我可以尝试在学校制造一个更先进的机器人。毕竟,Heathkit HERO1 仅基于带有 4KB 内存的 Motorola 6808 8 位 CPU(边栏:当今典型的 PCI-Express 1G 网卡仅用于数据包数据就有 64KB 到 256KB 的缓冲区)。
我的机器人的设计架构使用了更先进的 Intel 87x196KC。这是一个 16 位 CPU,它提供了 32KB 的内部 EEPROM 存储器用于程序存储,但它只提供了 512 字节的总 RAM 存储器。 “C”编译器生成的代码非常未经优化,这使得管理 512 字节的堆栈成为一项重大挑战,并且根本没有实时 JTAG 调试器或任何其他类型的调试器。但是,CPU 确实有一个内部串行/UART,您可以使用它来编写简单的字符输出以确定代码在做什么。由于 RAM 内存太小,CPU 甚至不支持对 printf/sprintf 的标准“C”函数调用。
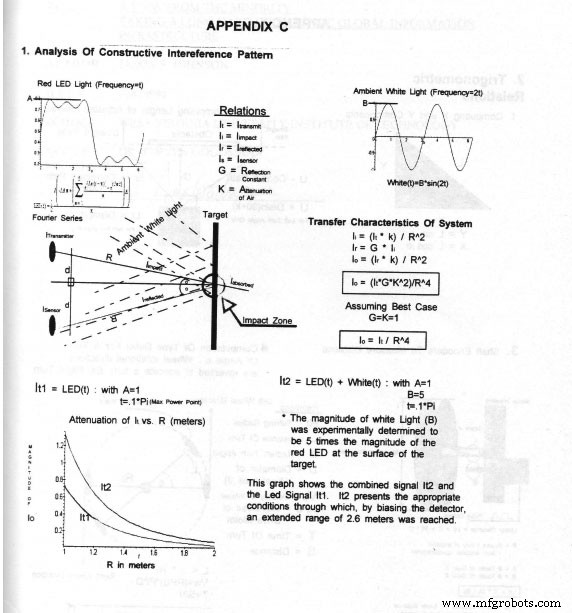
在开发机器人的过程中,使用了电机控制 FET 驱动器等各种电路,以允许 CPU 控制一系列 12VDC 电机,以便机器人可以在房间内四处走动。使用激光 LED、镜子和探测器构建了一个原始的“激光雷达”系统。这允许对机器人前方的房间进行简单的“1 位”视图进行成像。我也非常松散地使用术语“成像”。在大约 32 字节的内存中创建了一个简单的障碍物“开/关”图。然后,CPU 代码将尝试确定机器人是否正朝着它试图导航的迷宫中的间隙或墙壁移动。在比赛过程中,机器人成功地通过了迷宫。我什至写了一篇关于机器人设计的论文,它在 1997 年乔治华盛顿大学的 IEEE 学生论文竞赛中获得了第二名。机器人工作了,他们让我毕业并获得了电气工程学位。
2018 年高年级项目
我最近在斯克兰顿大学担任行业顾问,根据行业可能需要什么以及哪些技能/技术与当今的工程挑战相关,帮助为课程提供想法。我向我的一位教授询问了机器人项目以及学生们现在在做什么。
斯克兰顿大学仍然每年为他们的工程专业学生举办机器人比赛,但现在它是一个地区性和全国性的比赛。学生们正在设计的机器人要复杂 100 倍。目前的机器人使用的是 Raspberry PI 等 Arm9/Arm11 CPU。学生们正在编写在 Linux 上运行的“C”代码,以直接连接 USB-HD 摄像头,从而实现对机器人的实际想象。结合 Linux、Raspberry PI 以及可通过 GIT 和 Google 获得的大量开源项目,学生可以使用图像检测和识别算法。在当今机器人项目的开发过程中,学生可以下载开源算法,使用远程以太网监视器对其进行调试,从而使他们能够查看每个变量并单步调试代码。然后,学生们会花更多时间开发非常聪明的导航算法,试图让他们的机器人在比赛中获得更好的优势。
听完后,我立即回应“多么不公平!”。在我的日子里,我们必须将整个图像存储在 32 字节中,并手动编写堆栈管理器,以使我们的代码甚至可以在我们提供的仅 512 字节 RAM 上运行。当然,Raspberry PI 甚至还不是当今技术的“巅峰”——但它比 1997 年的任何产品都要好几光年。不仅硬件更加复杂,而且调试和开发环境让学生可以专注于设计而不是为记忆问题而苦苦挣扎。但是,有些事情保持不变。机器人仍然需要移动。尽管学生可以使用一些更高端的 CPU,但他们仍然需要在进程中获得 3.3v 端口来打开/关闭 12VDC 电机。这将学生带回到晶体管和 FET 的电路设计,他们了解这些基本组件的功能并允许他们的机器人移动。
我笑着说,基础还是适用的,学生们也认识到了这一点。复杂的电子产品仍然依赖于单个晶体管的基本操作;可能是 CPU 外部的一个启动电机,或者 CPU 内部的 5 万亿个用于处理图像和导航代码。
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
那么接下来呢?
我的第三份“工作”——我今天仍然有——是经营我自己的电子和软件咨询业务。我在 2001 年开始了咨询业务,它肯定充满了工作和意想不到的活动。我直接雇佣了十几个人,我们从事的硬件和软件项目包括电源设计、打印机驱动程序、图像处理、网络设备、硬盘驱动器和密码学。就我个人而言,我计划更多地专注于我最喜欢的技术项目——Xilinx FPGA。
Kintex/Atrix 系列等现代 FPGA 设备汇集了硬件和软件开发的最佳部分;可重构硬件、可重构软件和同步调试。然后我一直在从事的一个特定项目是质谱仪。在这个特定的设计中,速度和数据收集有很多限制。修复的一部分是“只需添加另一个处理器内核”。几乎就像魔术一样,单核设备因为双核设备允许对家务任务和时间关键功能进行分区。在 1997 年,重新配置具有额外处理器内核的物理设备(例如 FPGA)的能力是难以想象的。现代 FPGA 设备现在允许您一直这样做。
我计划在今年晚些时候回到斯克兰顿大学,与一些学生讨论当前的 FPGA 项目。我会在工作中更多地关注它们;也许在未来,当新工程师开始新职业生涯的第一份工作时,我将能够指导他们。附言“分数”是 20 年。我不得不再看一遍。我是工程师,不是英语专业的。
附录 A – 摘自我的机器人论文或
“时代如何变化”
本文由 Spano 先生撰写,他是我们团队的一员,如果您想阅读他的传记,请点击此处。
工业技术