

MeArm 机械臂 - 你的机器人 - V1.0
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
关于这个项目
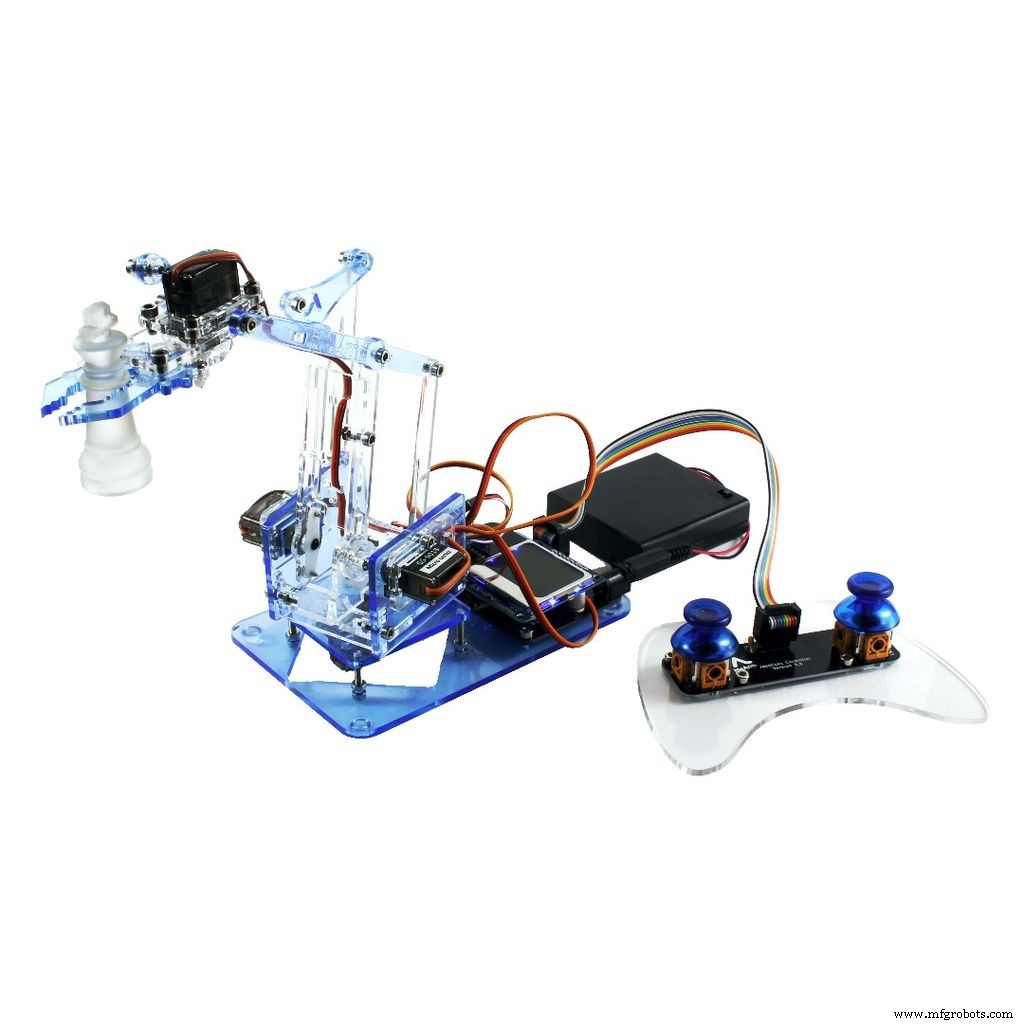
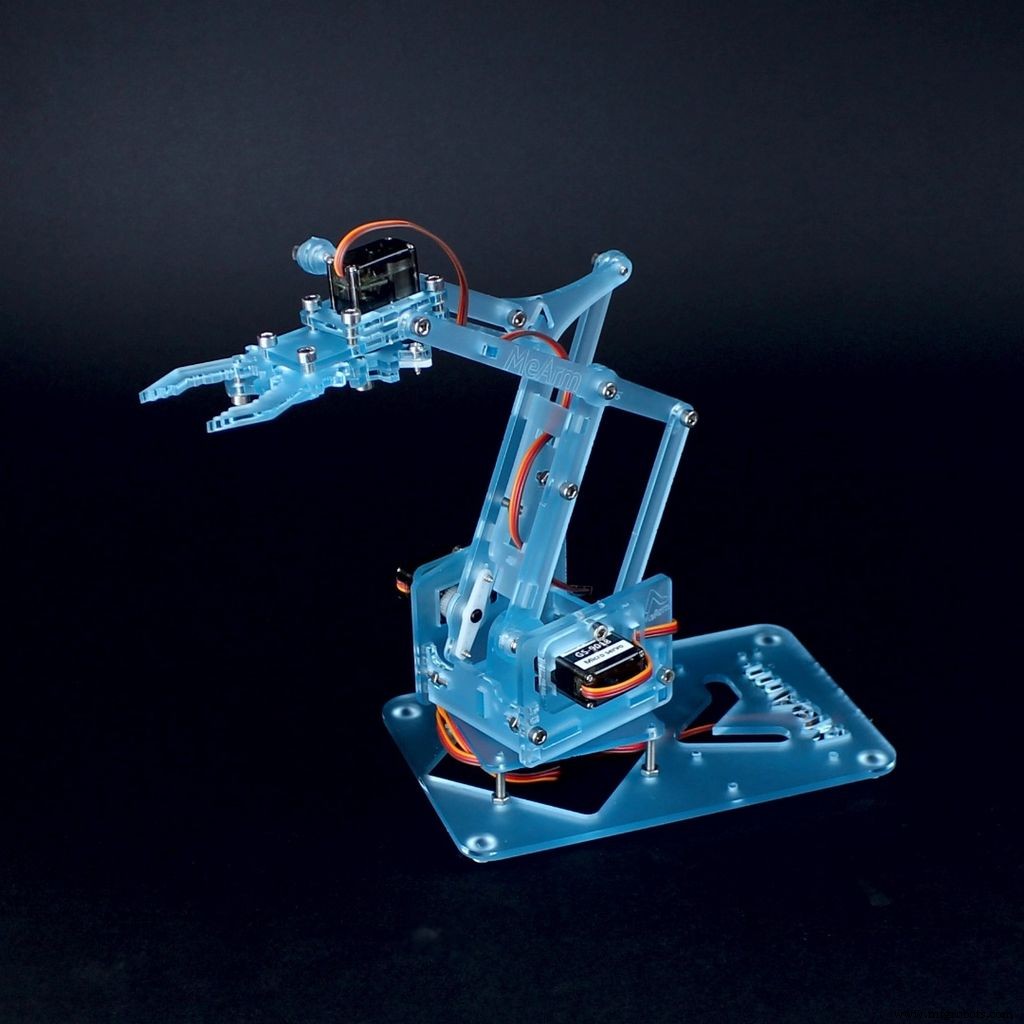
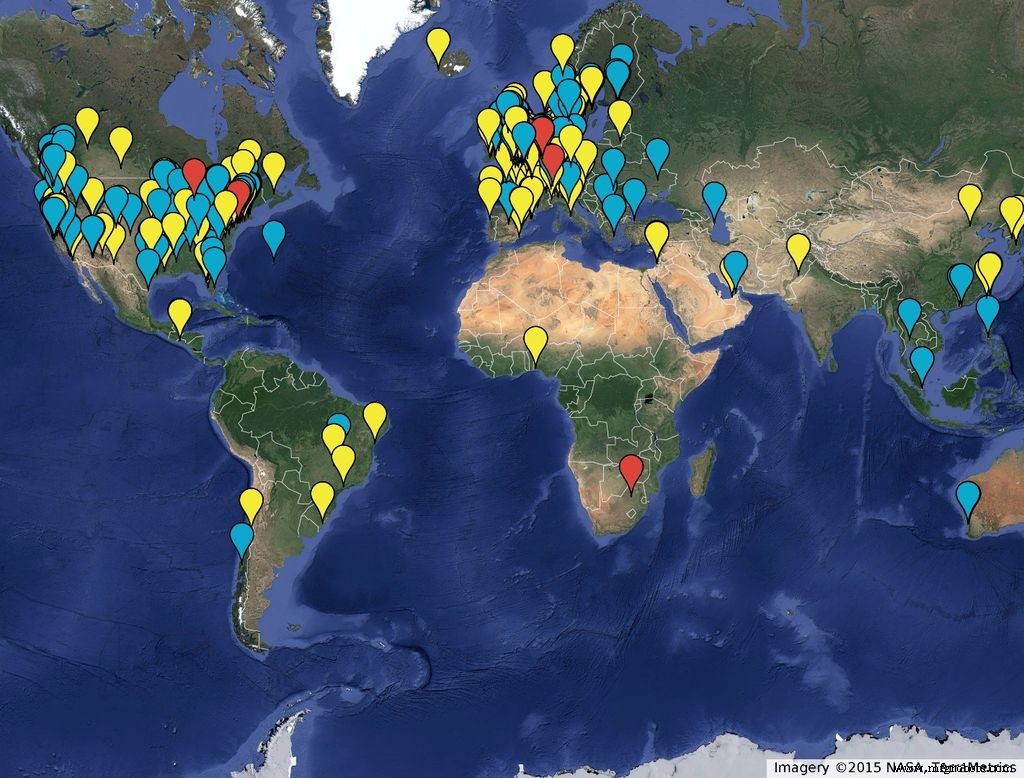
这是 MeArm 机械臂构建说明的最新版本。 MeArm 于 2014 年 4 月首次出现在教学设备上,当时我们在机器人竞赛中获得了二等奖。从那时起,我们已经看到世界各地建造了大约 10,000 个!我们的地图上只显示了一小部分,但我们真的很自豪在教科书的帮助下,我们已经成为世界上第一个病毒式机器人!
我们将这些说明放在一起,以补充我们资源页面上的说明。
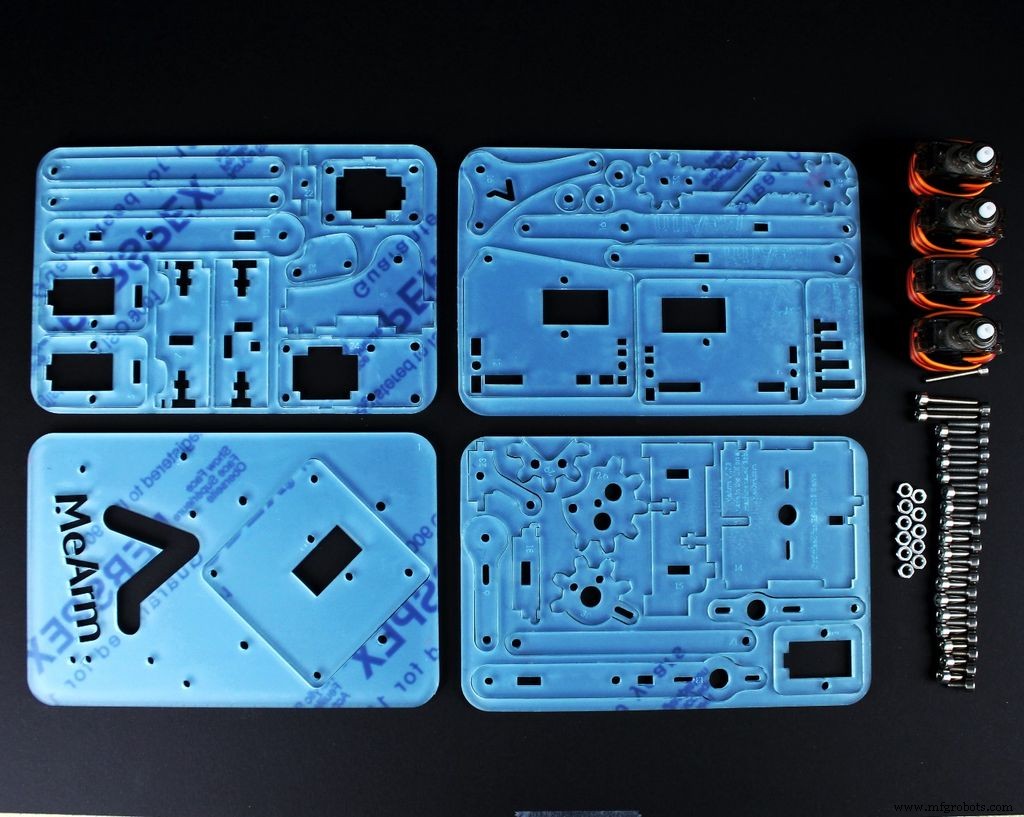
第 1 步:获取您的文件,启动您的 lazors!
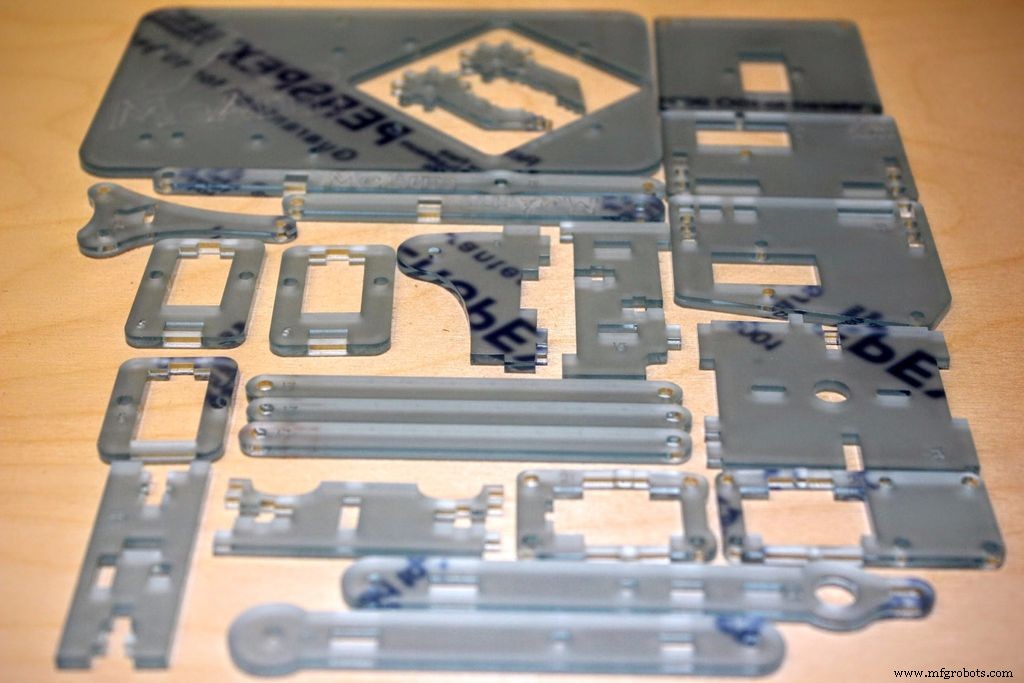
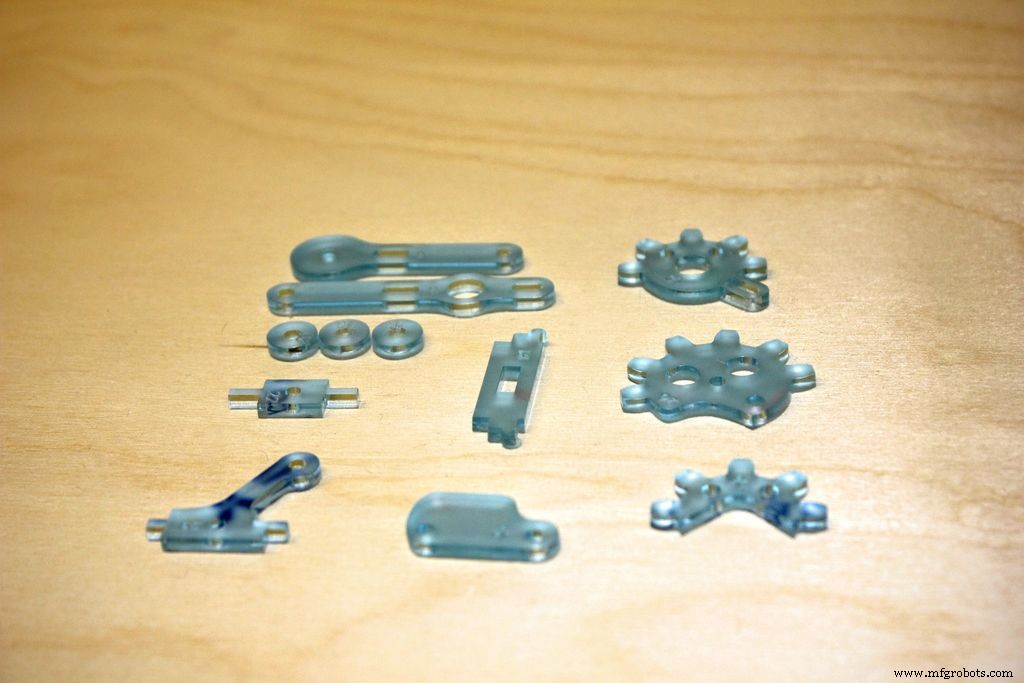
MeArm 仍然并且几乎一直是开源硬件。因此,您可以在 thingiverse 上获取我们的文件。这是一个 .dxf 文件,所以它应该适用于大多数激光切割机,我们在零件周围放了一个盒子,以便您可以将其设置为正确的尺寸。我们使用 3 毫米亚克力,但设计相当宽容,我们已经看到它是用木头制成的,甚至是 3D 打印的。
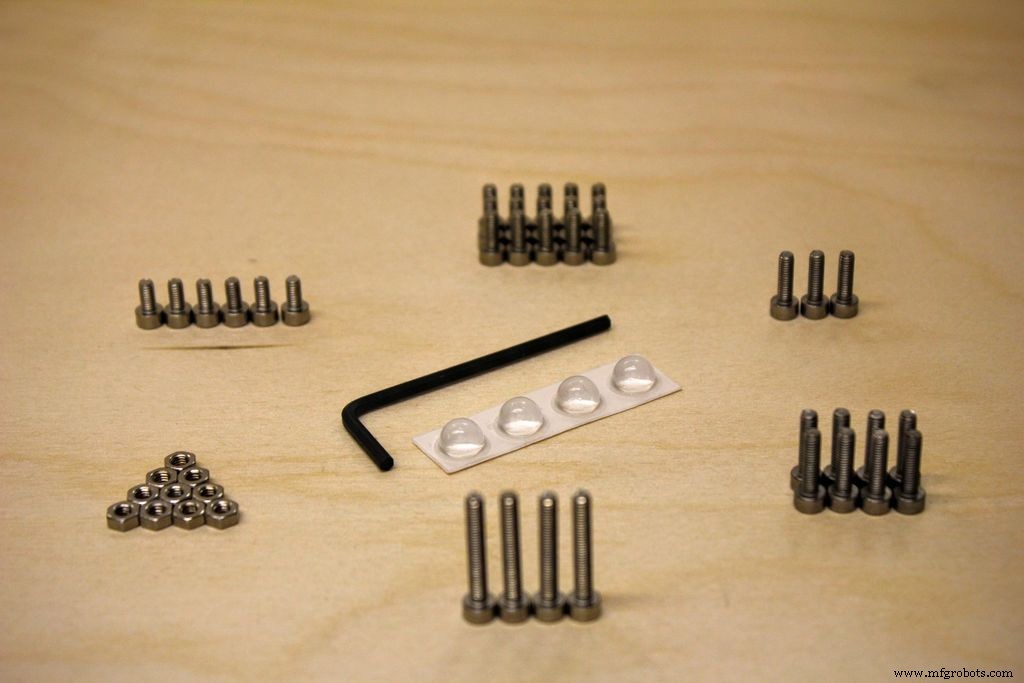
你还需要一堆螺丝。当前负载输出需要:
螺母 x 11
6 毫米 x 7
8 毫米 x 15
10 毫米 x 5
12mm x 8
20mm×4
所有 M3 尺寸,即公制 3 毫米。我知道这在美国很难找到,但拜托,你已经登上了月球,你可以找到一个合适的替代方案!
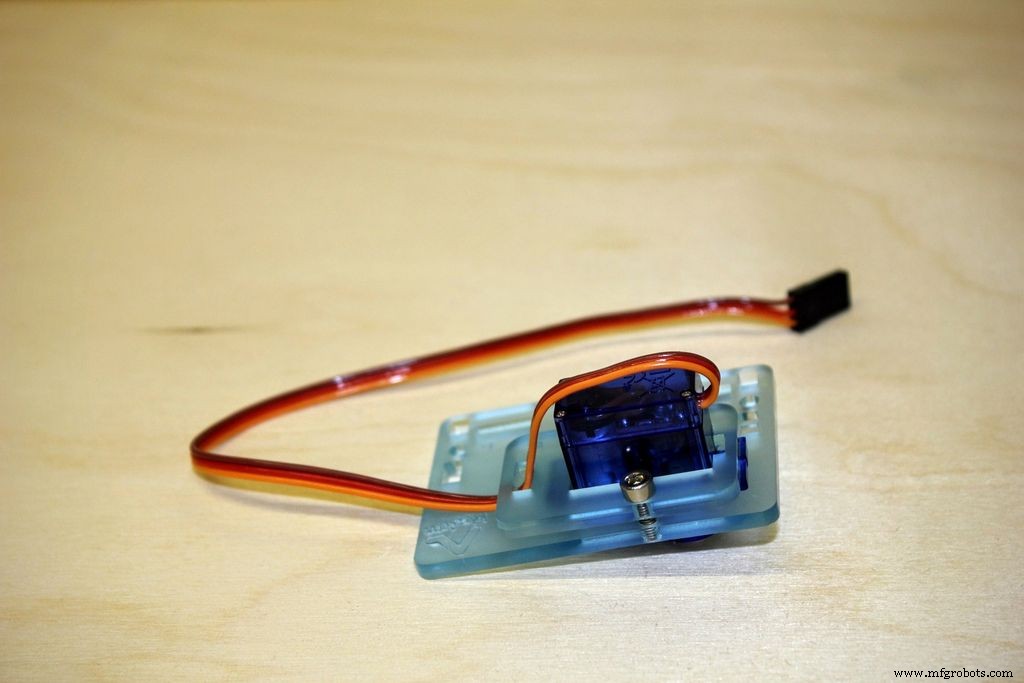
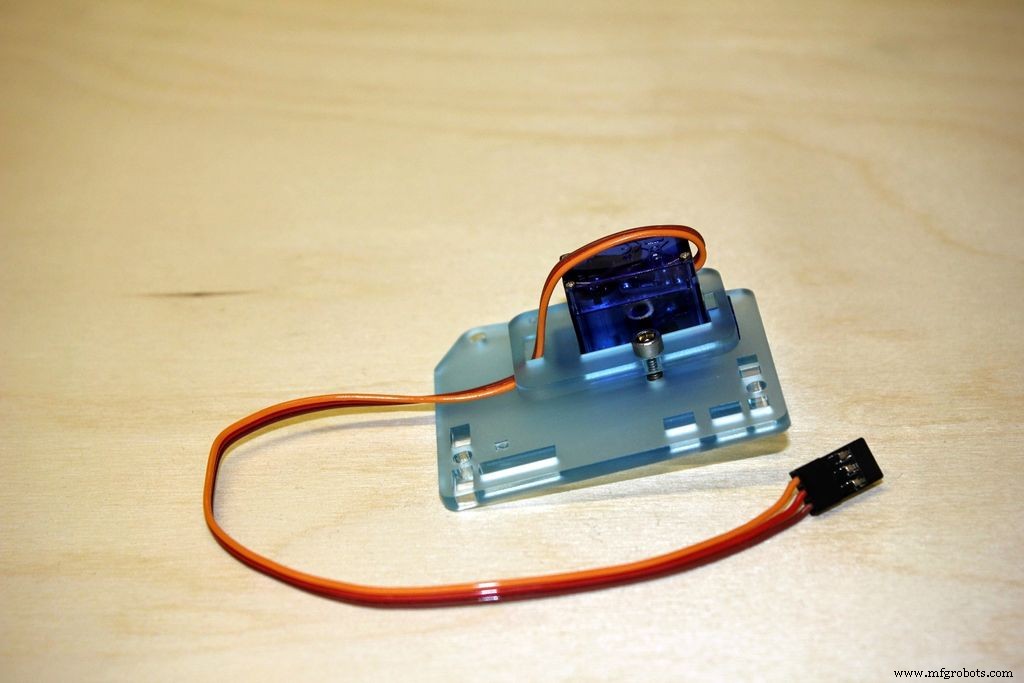
第2步:坚持!让我们校准!
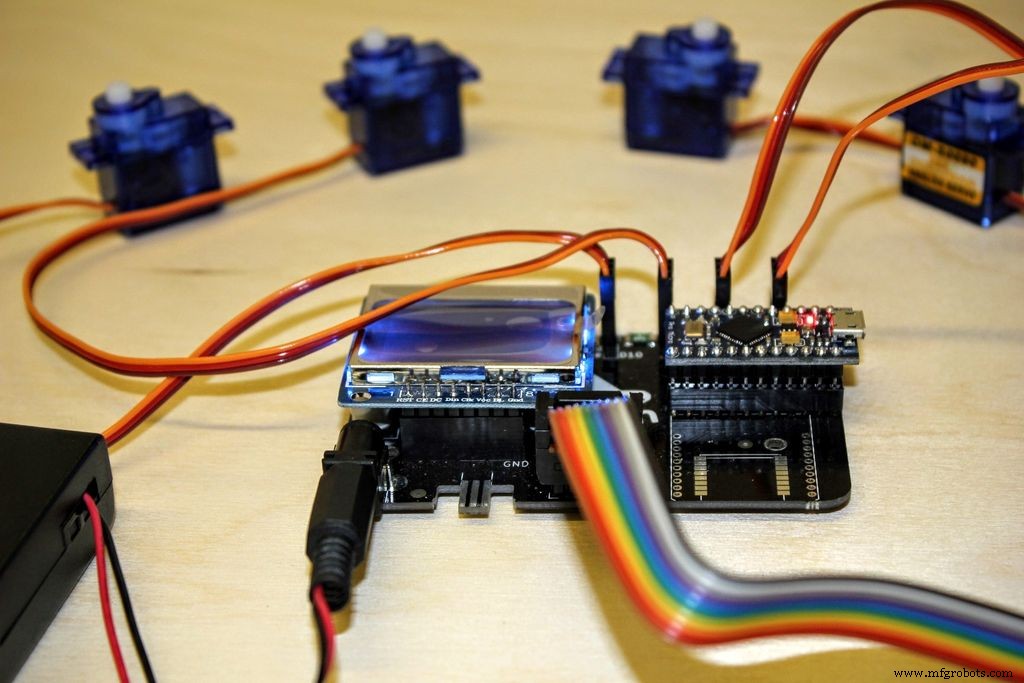

如果您对零件进行了激光切割或购买了我们的一套套件,那么您肯定会想要组装它。但首先你需要完成一个重要的步骤。我们需要校准舵机。在这里,我们将使用我们的 Brains Board,它与 Arduino 兼容,但您可以使用任何会生成 PWM 信号的东西来校准它们。有适用于 Arduino、Raspberry Pi、Beaglebone Black、Sparkcore 和 Espruino 的 MeArm 代码。
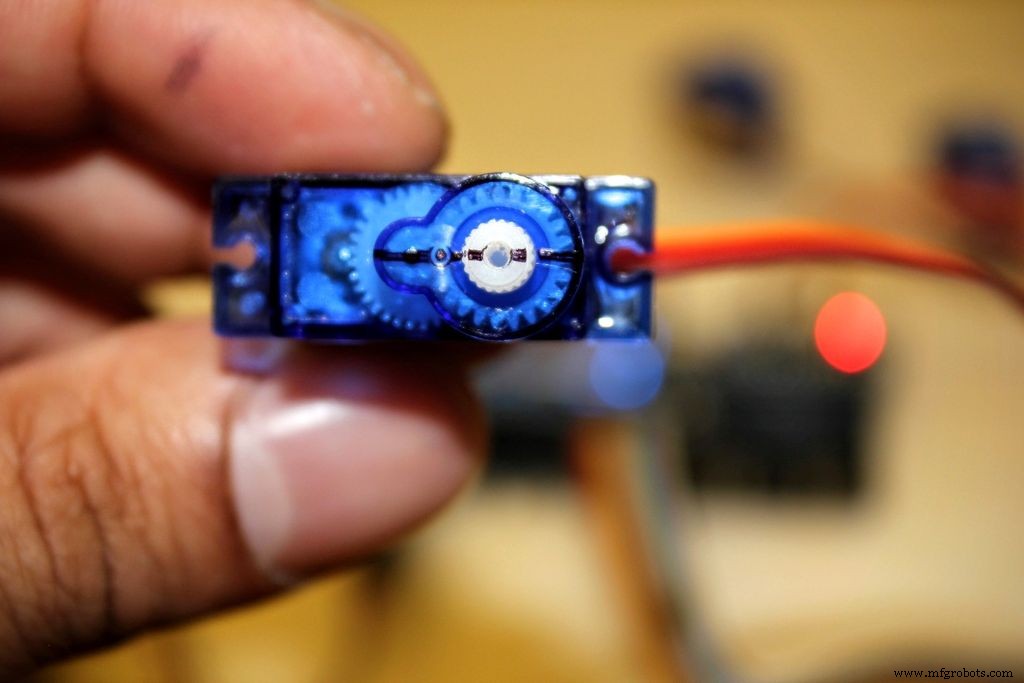
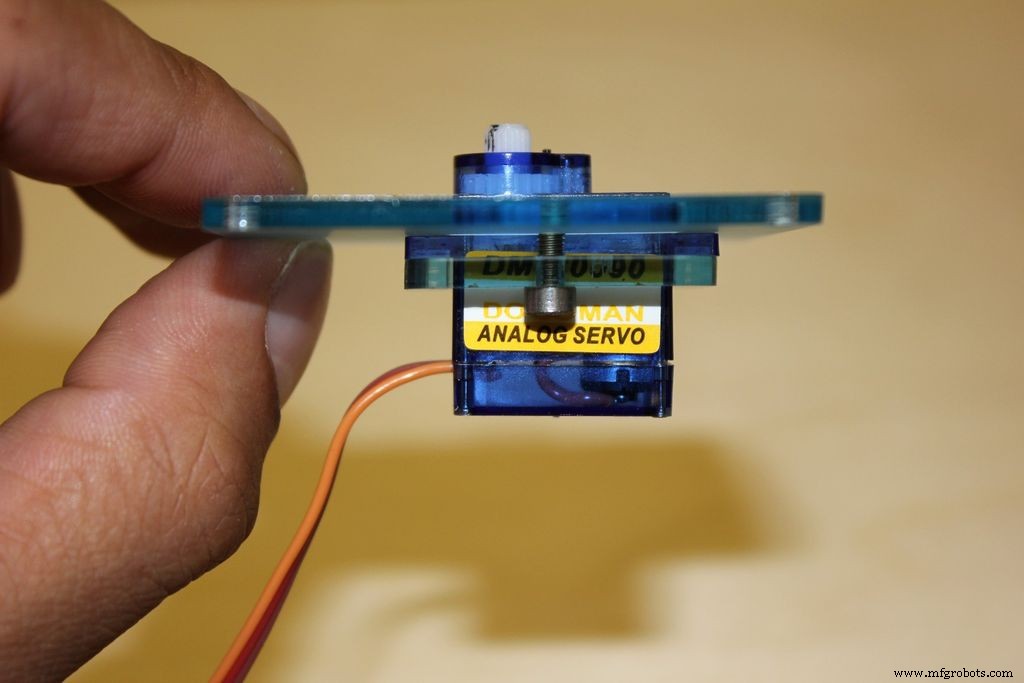
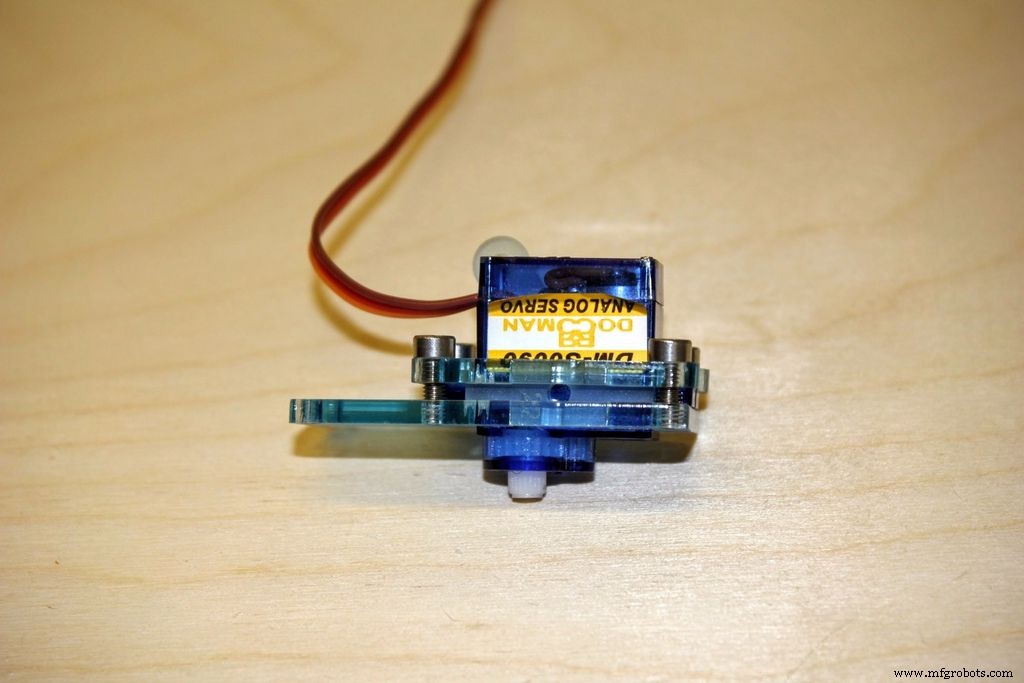
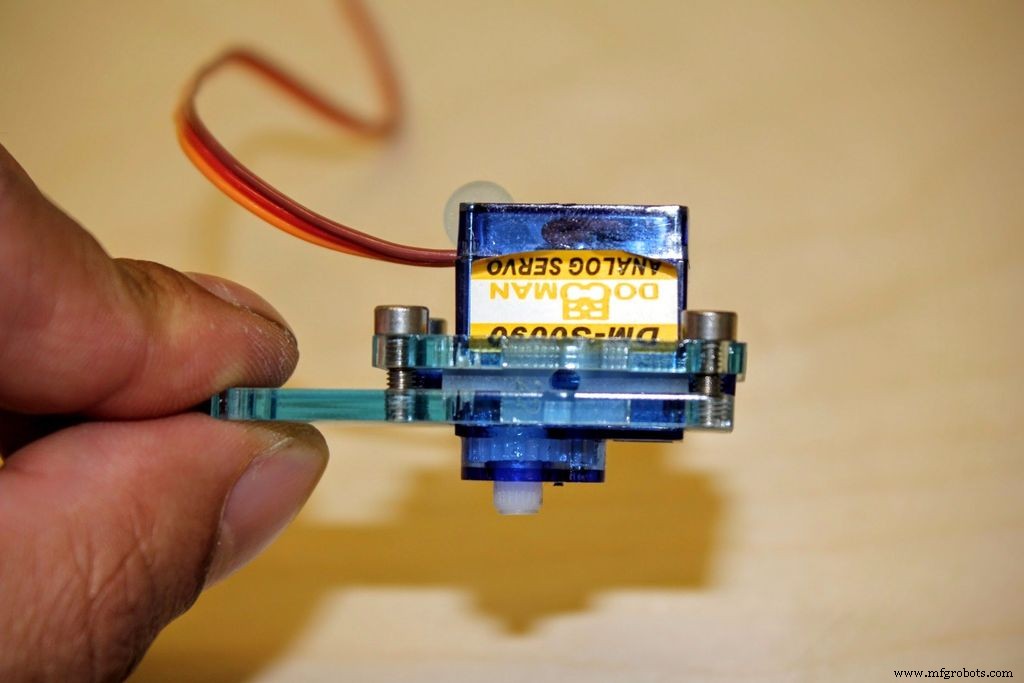
使用我们的大脑板,它将被编程为转到默认位置。中、左、右、爪舵机分别为90、90、90、25。在伺服的主轴和主体上标记一条中心线,您也可以将它们标记为 c、l、r 和 c,或通过其他对您有意义的系统进行标记。
不要试图用手转动它们,您强大的力量提供的扭矩可能会损坏伺服齿轮。出于同样的原因,在构建 MeArm 之前执行此过程非常重要。
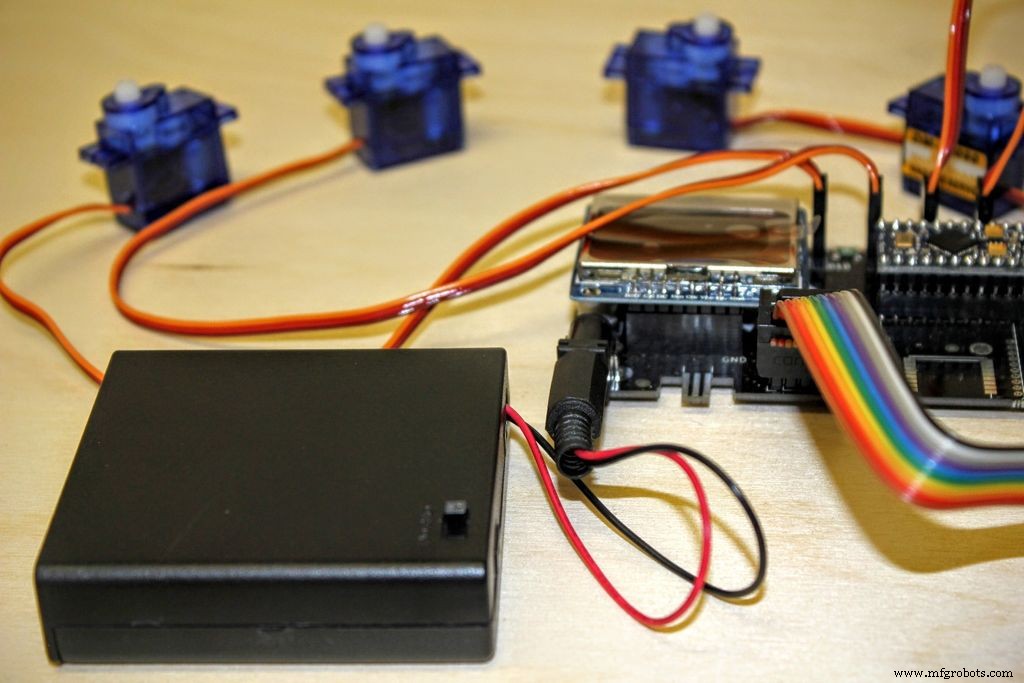
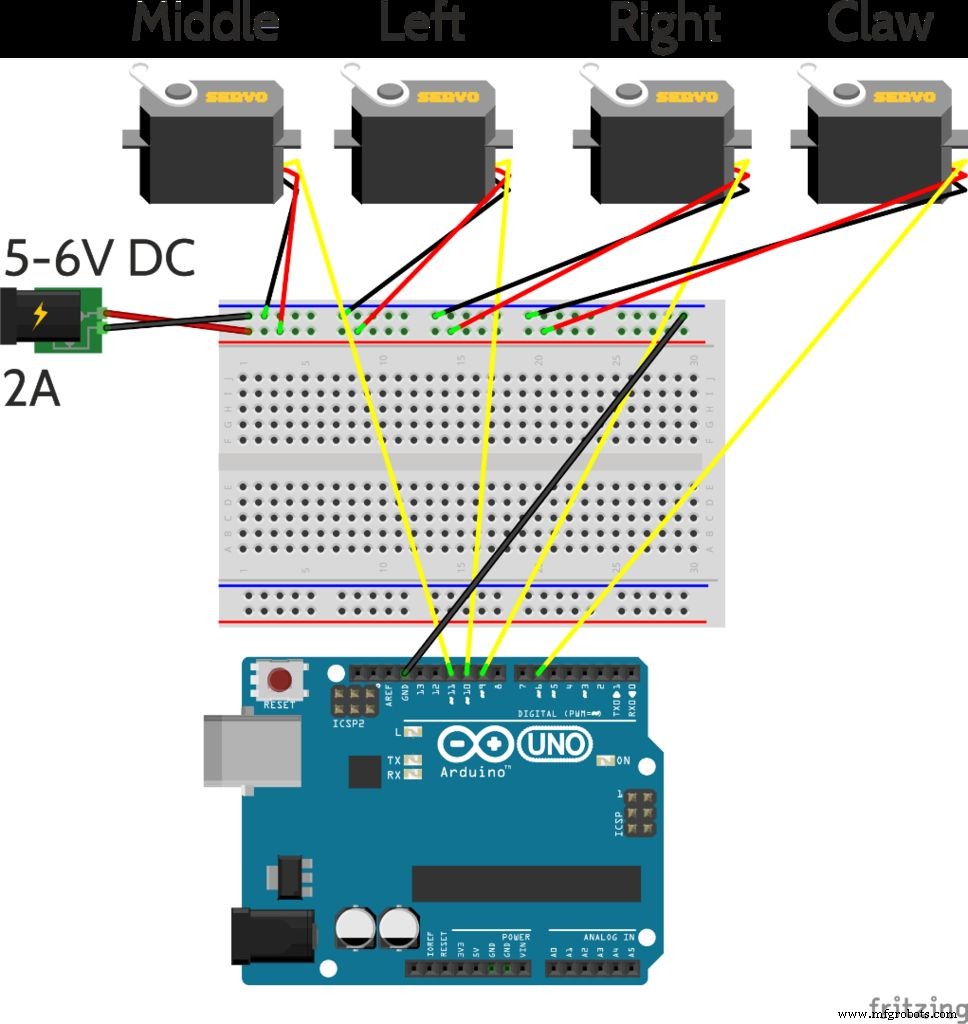
如果您使用的是 Arduino,那么上图中显示的设置和此代码将为您提供相同的结果。我们将 Codebender 用于我们的演示代码,并且会喜欢一件 T 恤。因此,如果您要开设帐户,请使用此链接。
在设置伺服系统时要意识到的最重要的部分是您无法通过微控制器为它们供电。您需要一个单独的 5-6V 2A 电源,与微控制器有一个公共接地。查看 Arduino 设置图片了解更多信息。
第 3 步:我们走吧!
校准您的伺服器后,我们可能会崩溃。从字面上看,如果您有我们的抢购包之一!
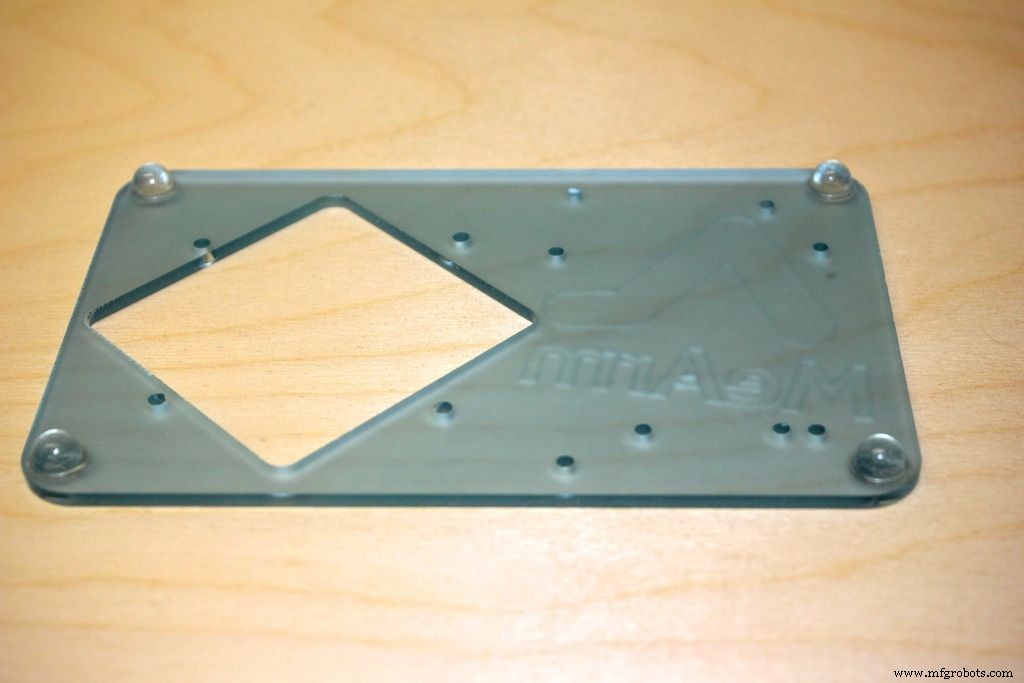
您可能需要花一些时间去除亚克力件上的保护背衬。您可以边走边做,也可以一次性完成。您的来电。
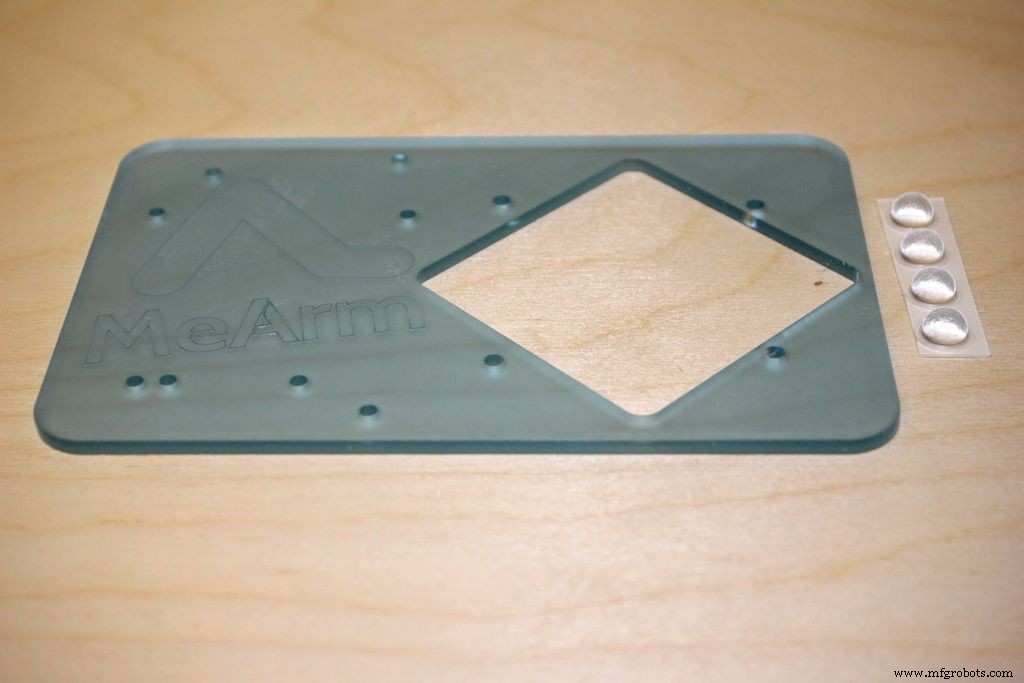
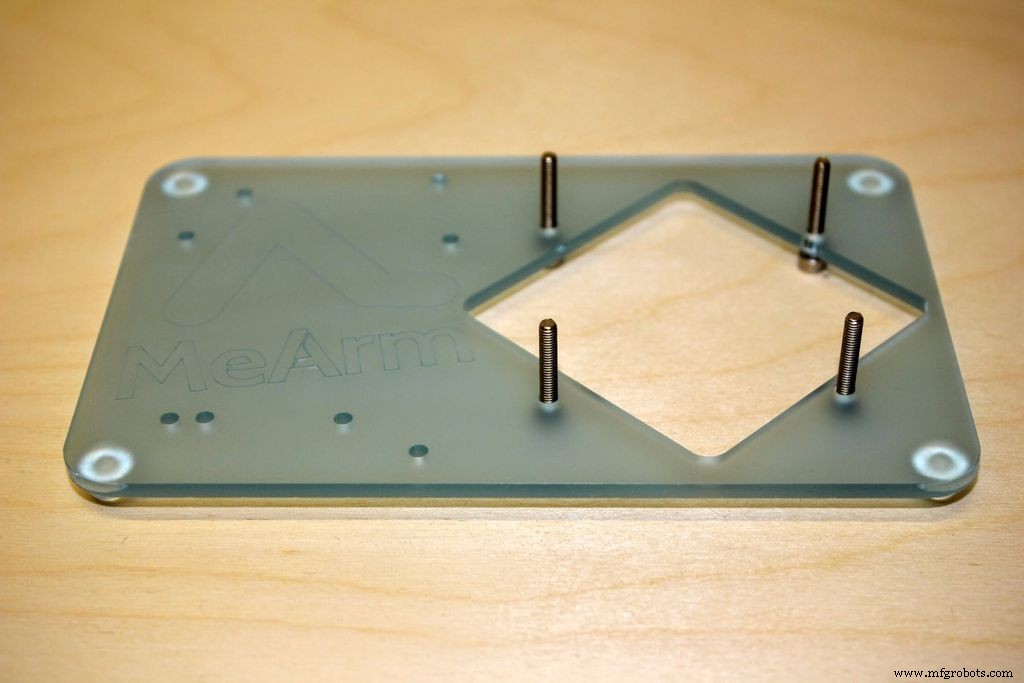
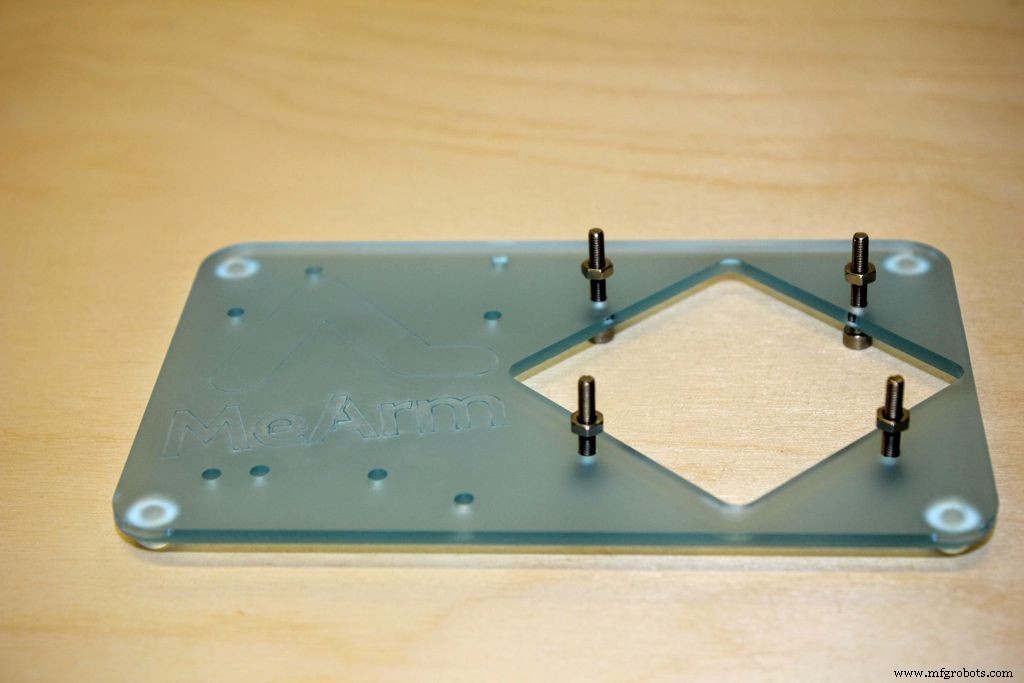
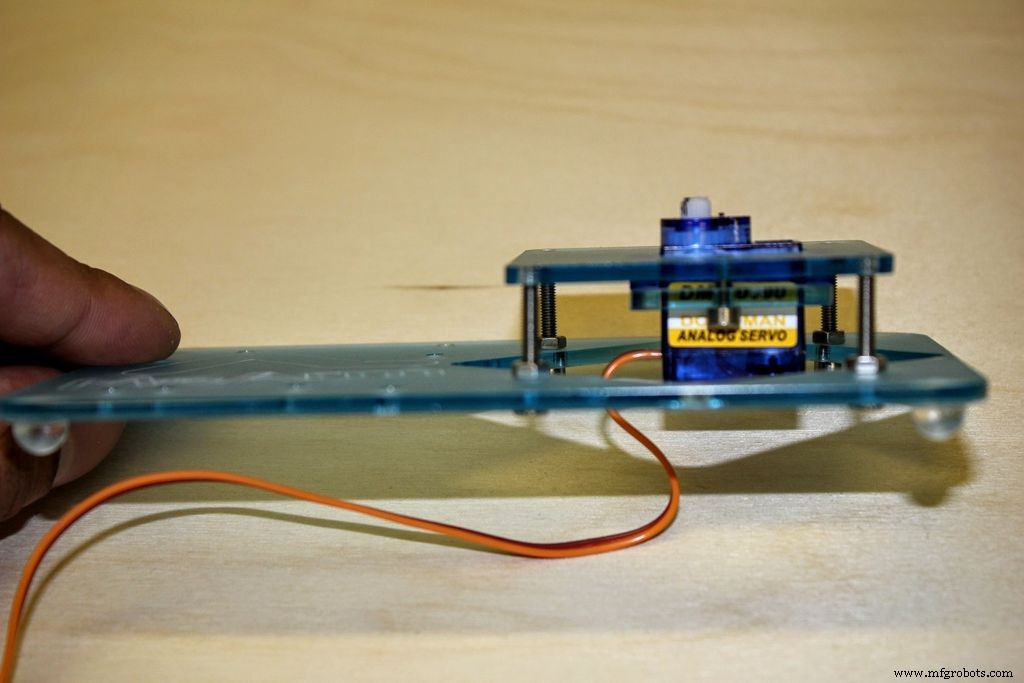
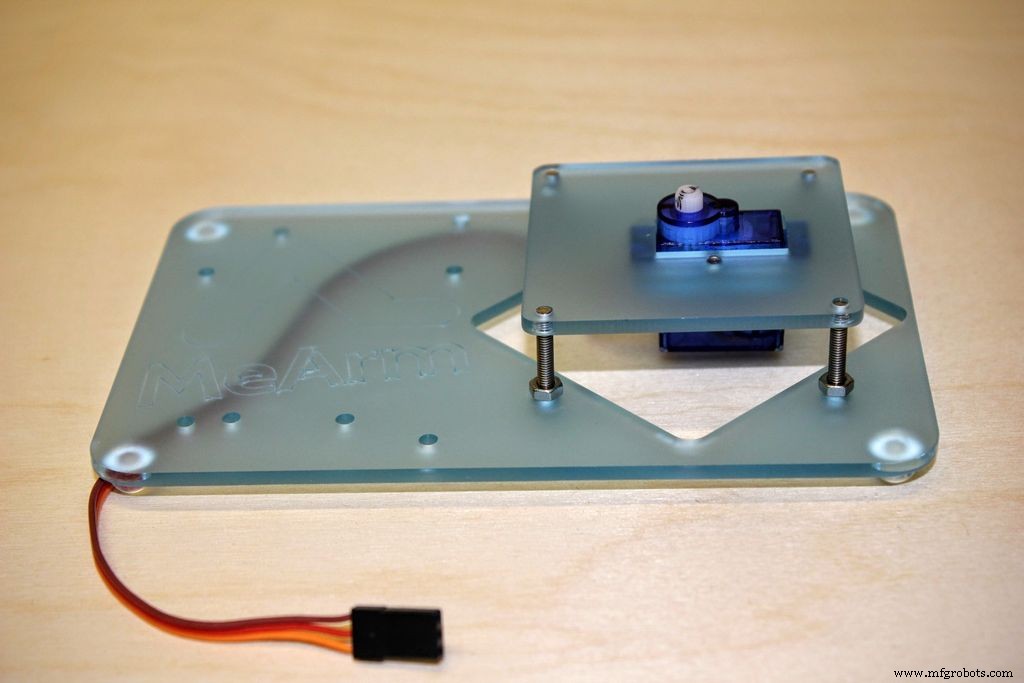
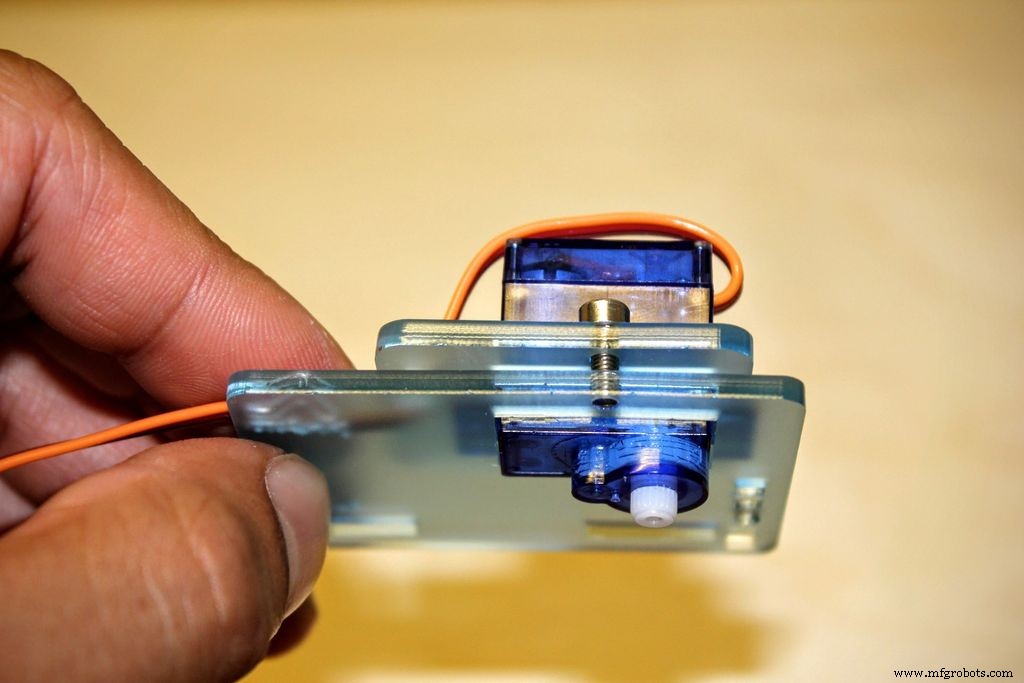
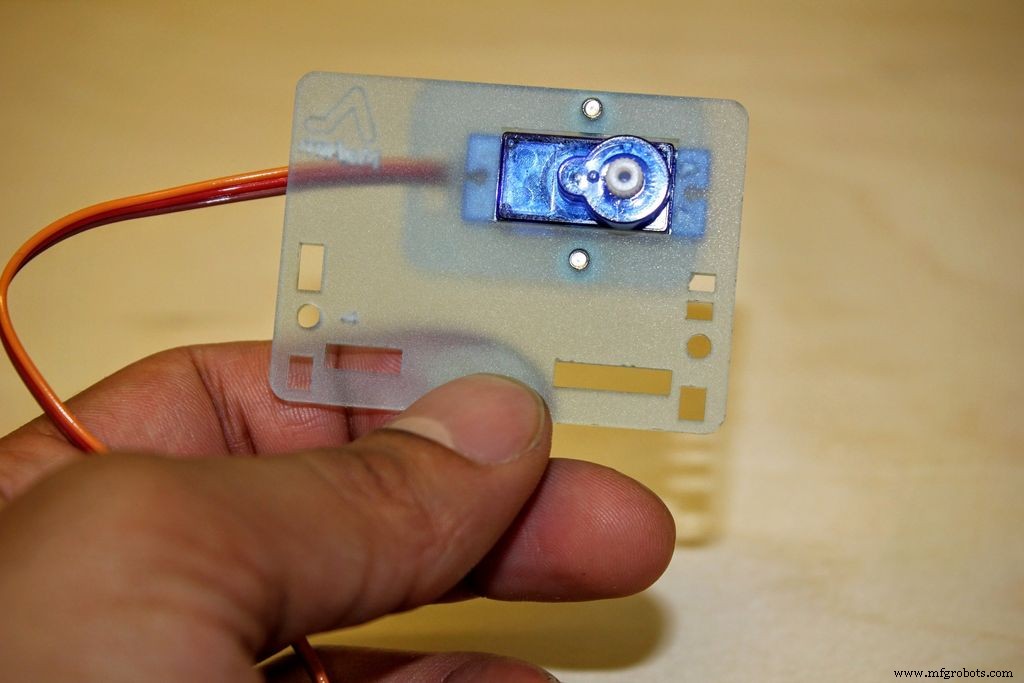
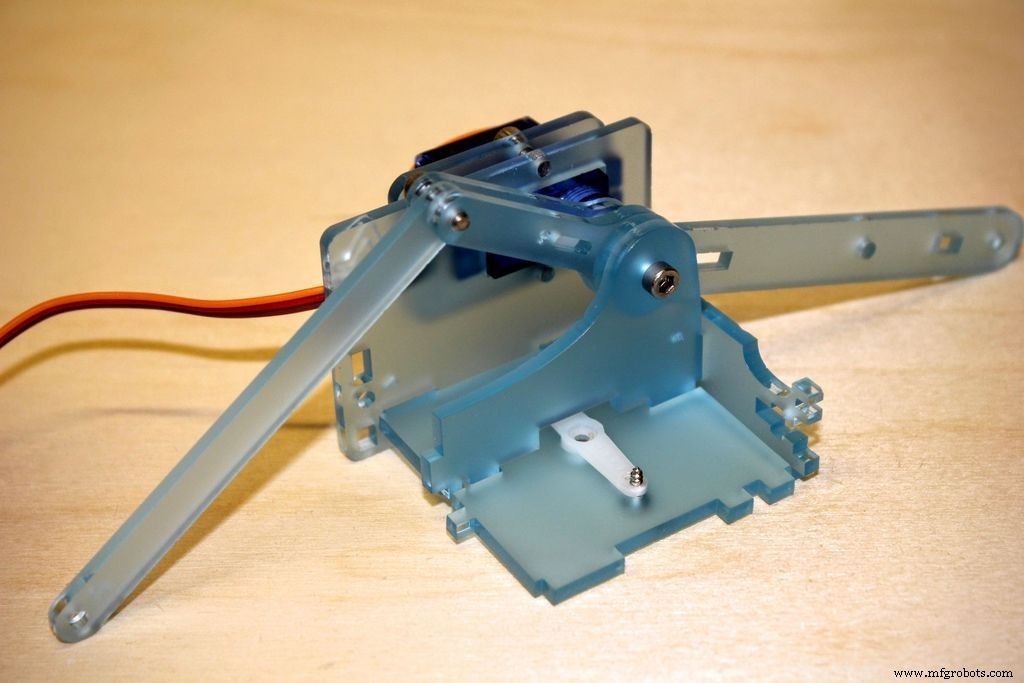
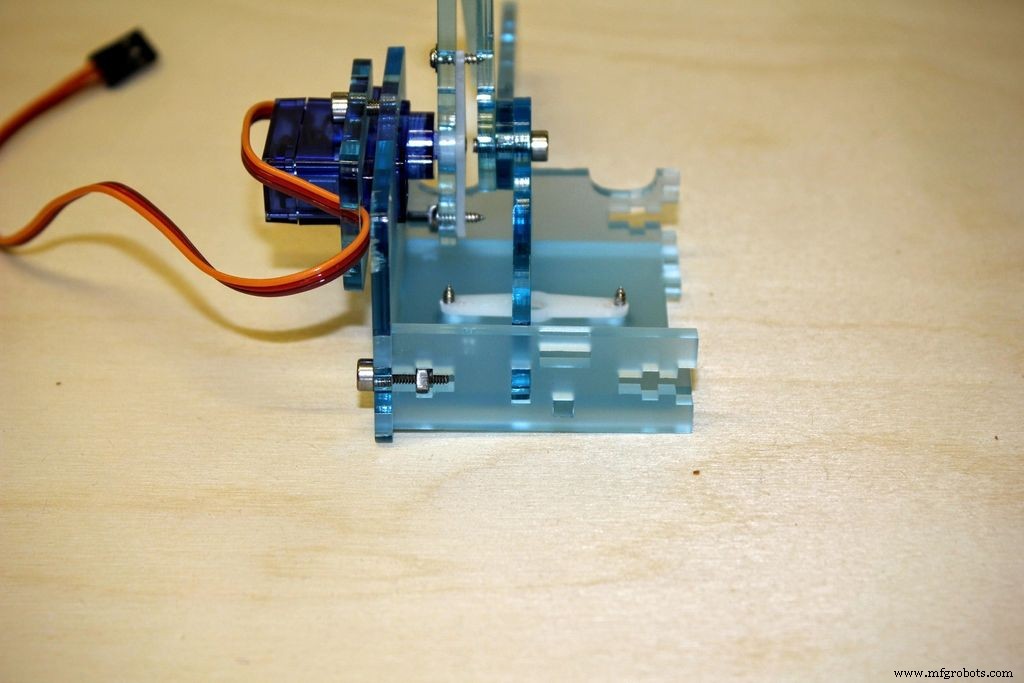
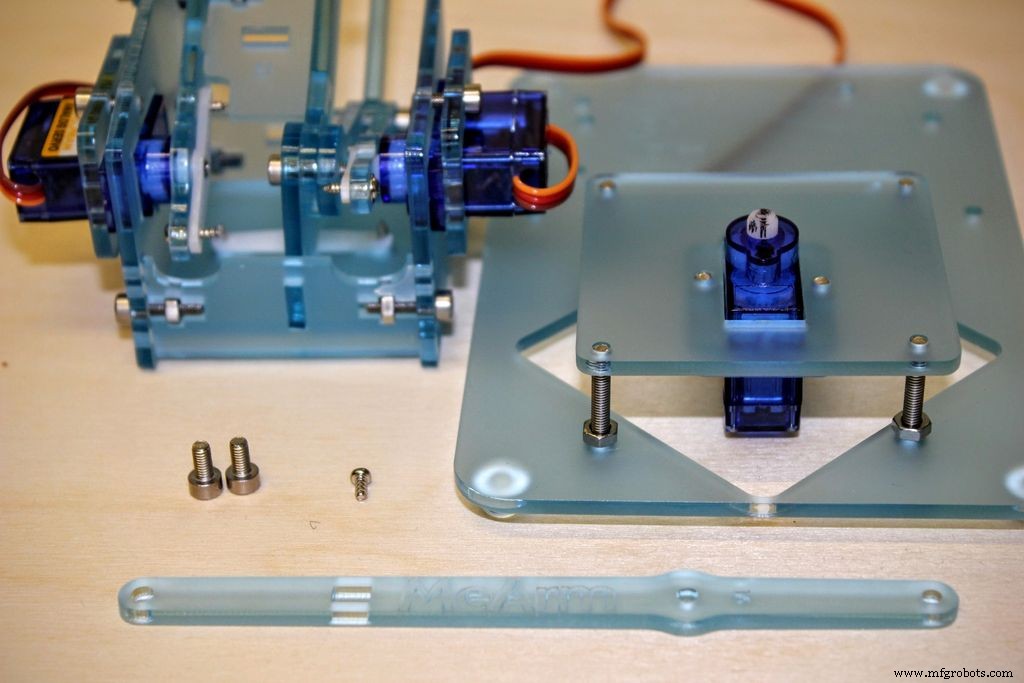
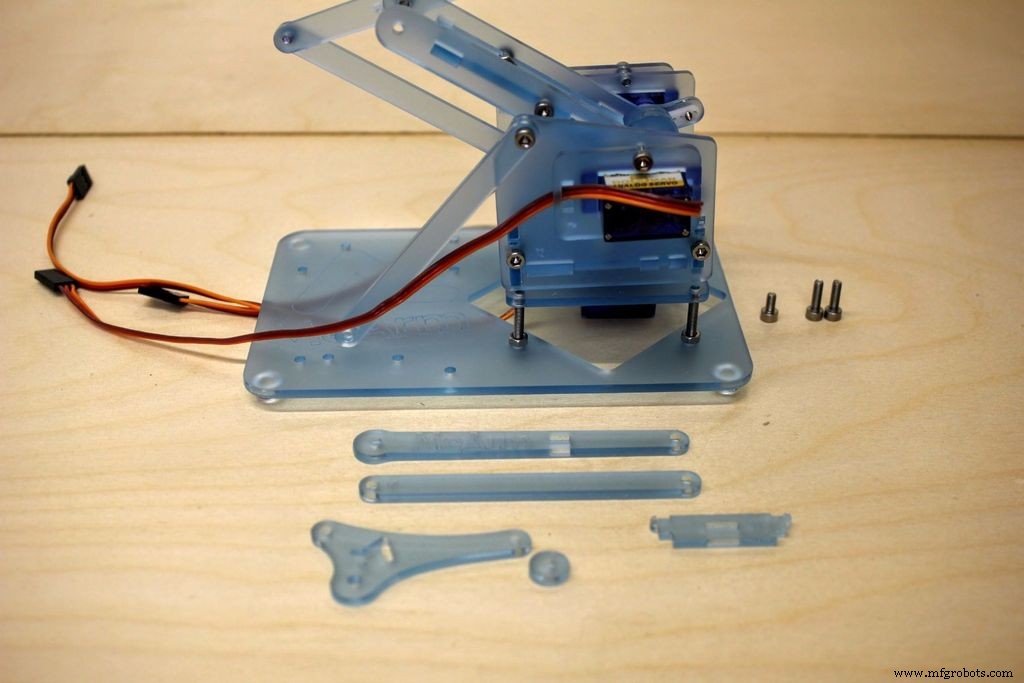
找到最大的部分 (#1) 并将粘性垫脚连接到它的角落。然后从底部插入四个 20 毫米螺钉,然后将四个螺母拧到一半。现在找到第 2 部分、第 3 部分、您的中心伺服系统和两个 8 毫米螺钉。将伺服器穿过第 3 部分,我们称之为项圈。将螺钉穿过轴环,然后将它们拧入第 2 部分。
螺钉自攻入第 2 部分,这意味着它们切割了自己的螺纹。在 MeArm 上有两个孔尺寸,一个大约 3 毫米,您可以将螺钉穿过,另一个大约 2.6 毫米,我们希望螺钉自攻。这是我们从 Joo 惊人的 PlotClock 借用的方法。
现在我们通过 20 毫米螺钉将伺服 / 轴环组件连接到零件 #1,这些螺钉会自攻,零件上孔的方向应该意味着您不能以错误的方式将其拧紧。这称为 Poka-yoke,是一种防呆设计的方法。如果你有一个早期的模型 v1.0 你会看到我在这方面的尝试过于热心,因为只有 1/8 的方法可以做到(如果你无法匹配孔,则将零件翻转过来)。后来的版本在 Scott Pierce 的建议下进行了调整,并有 1/2 的方式。
第 4 步:左侧
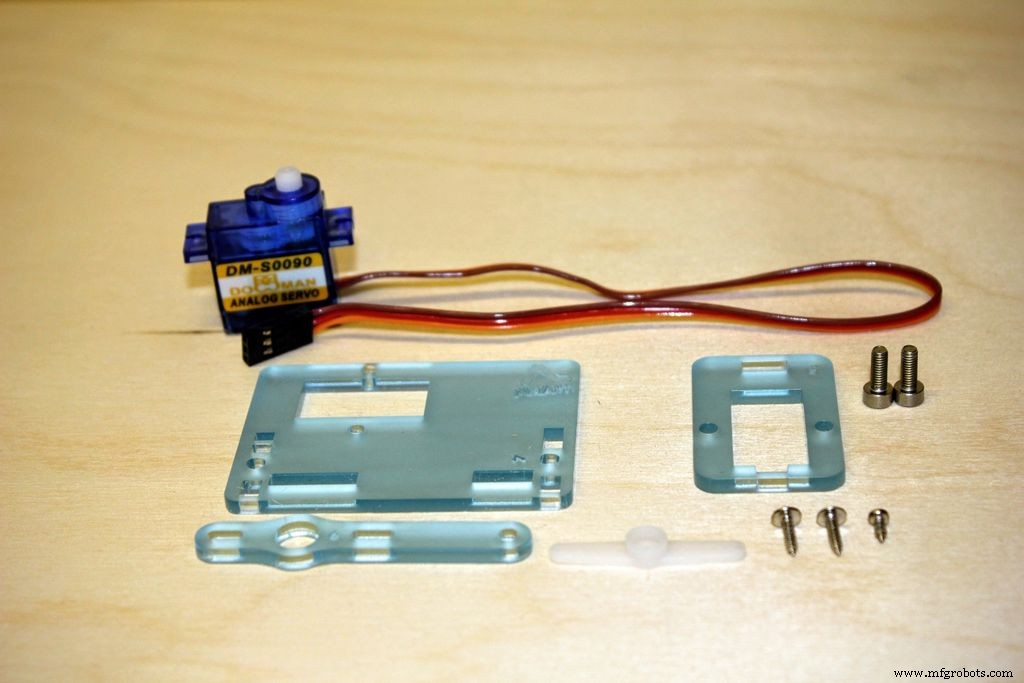

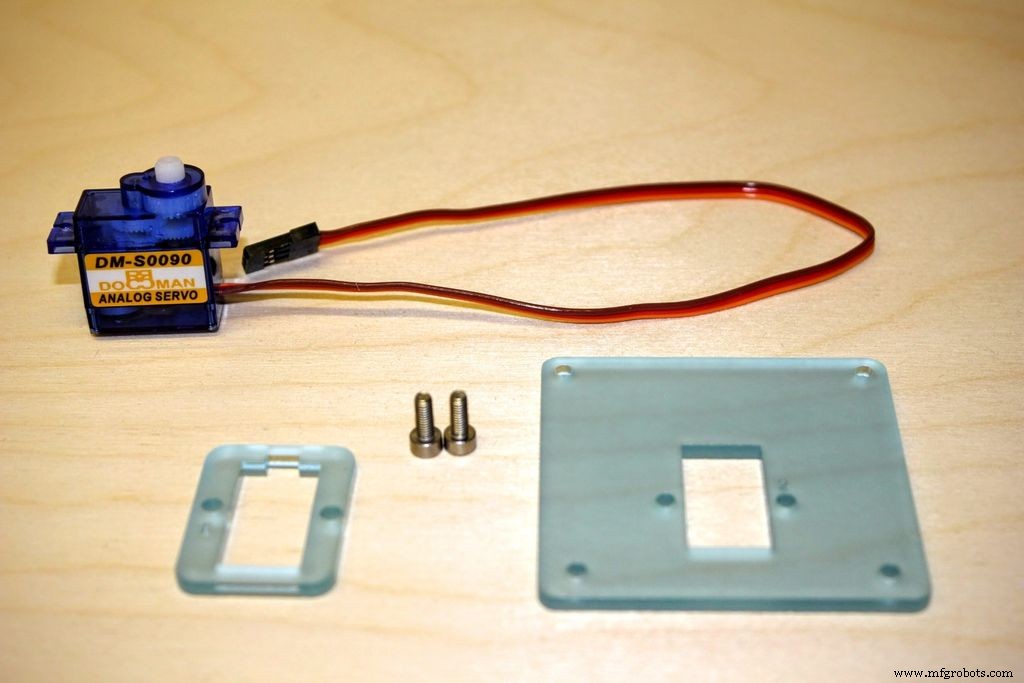
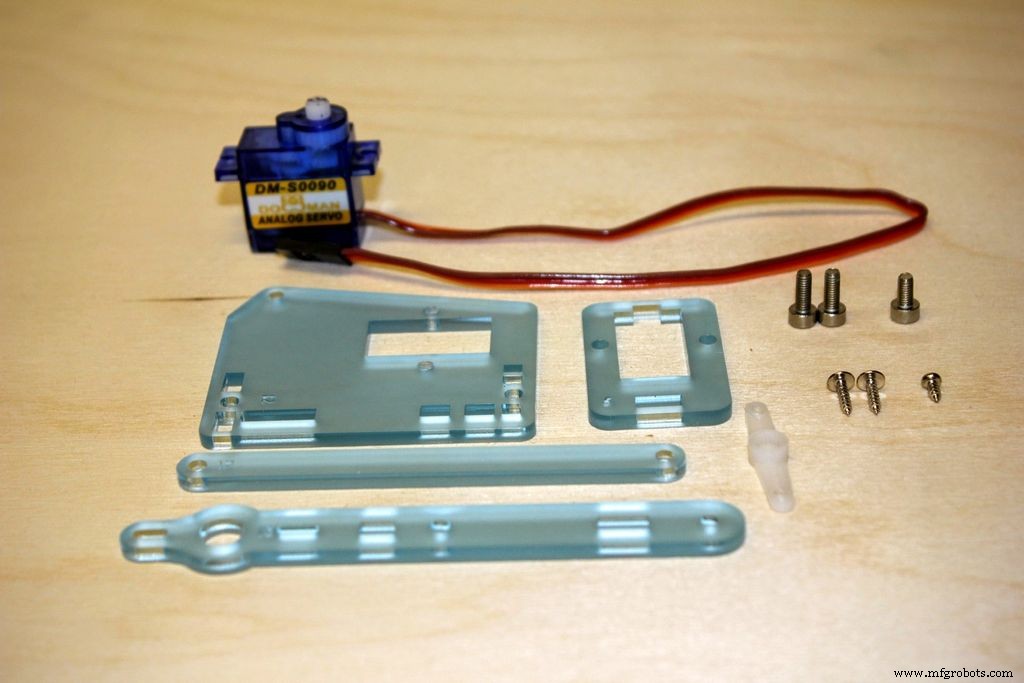
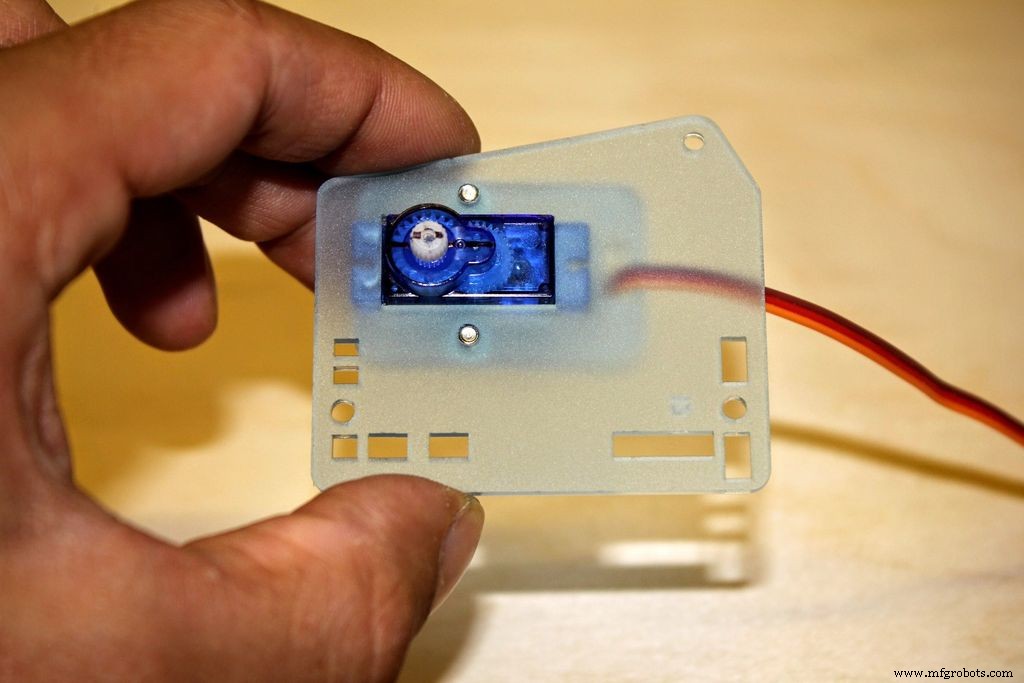
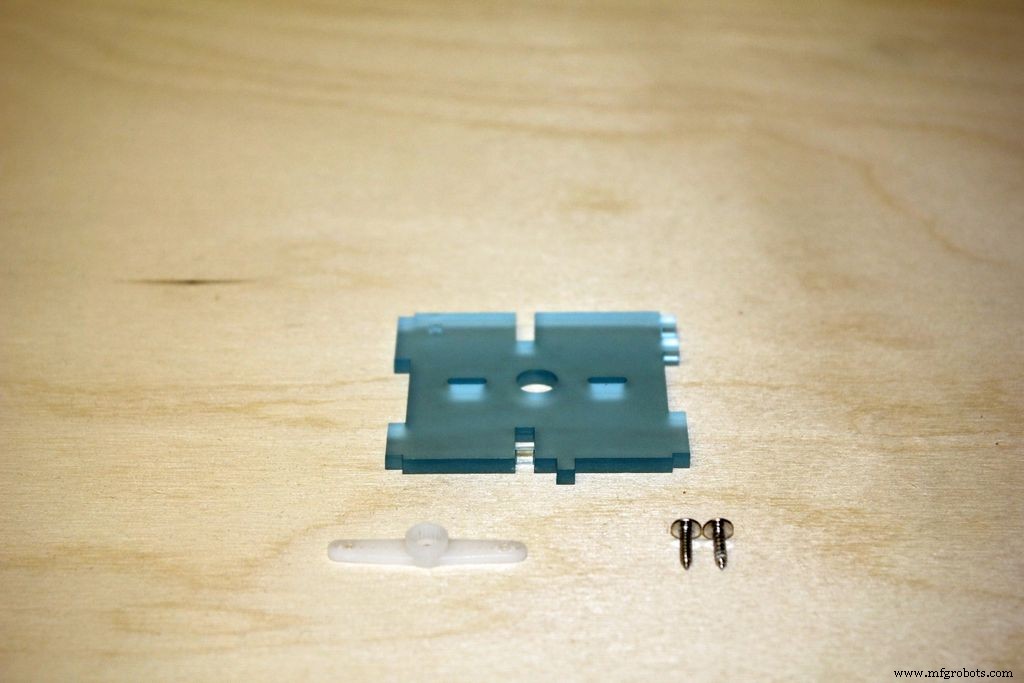
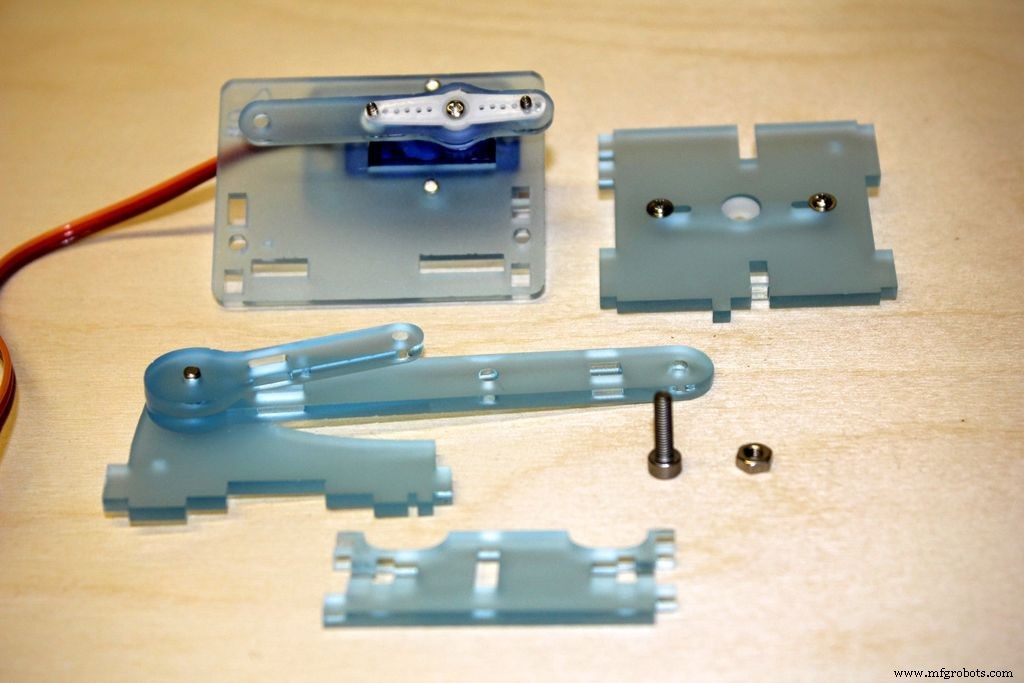
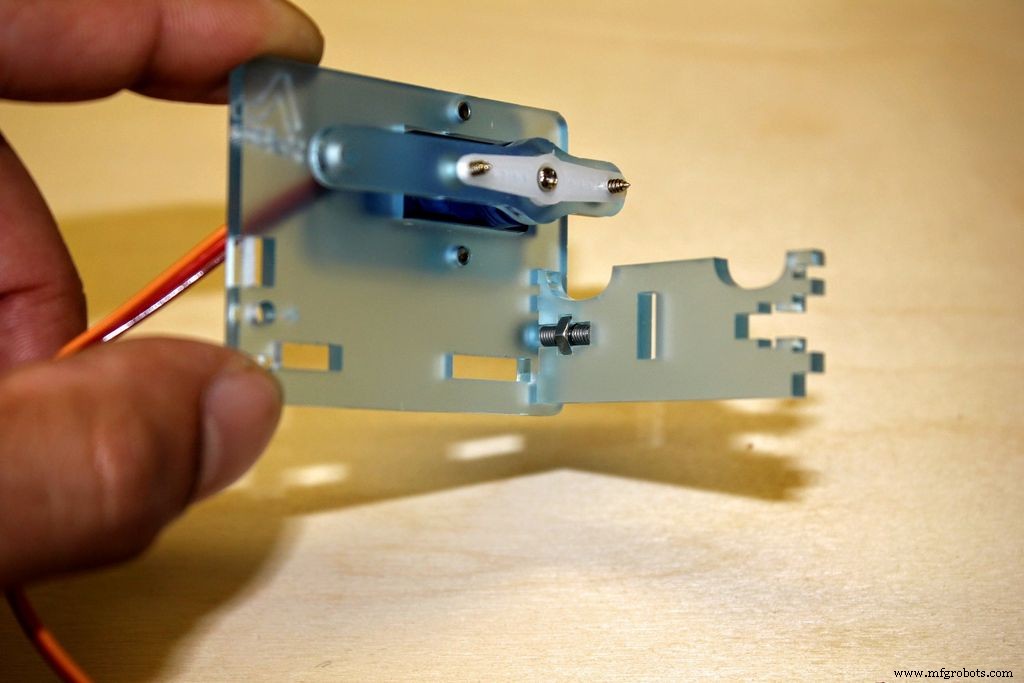
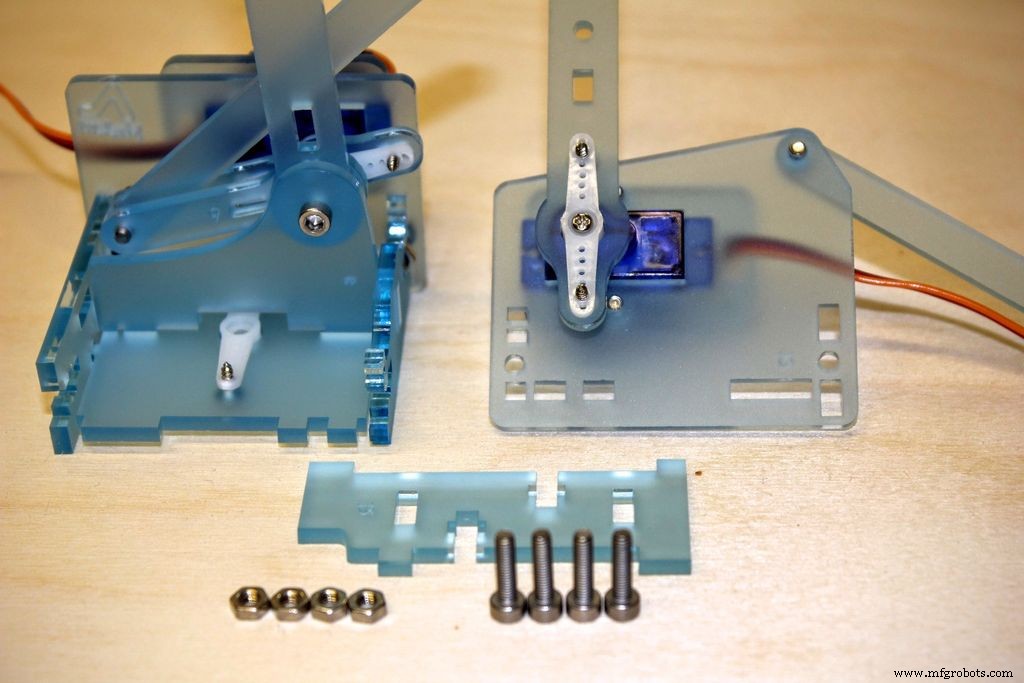
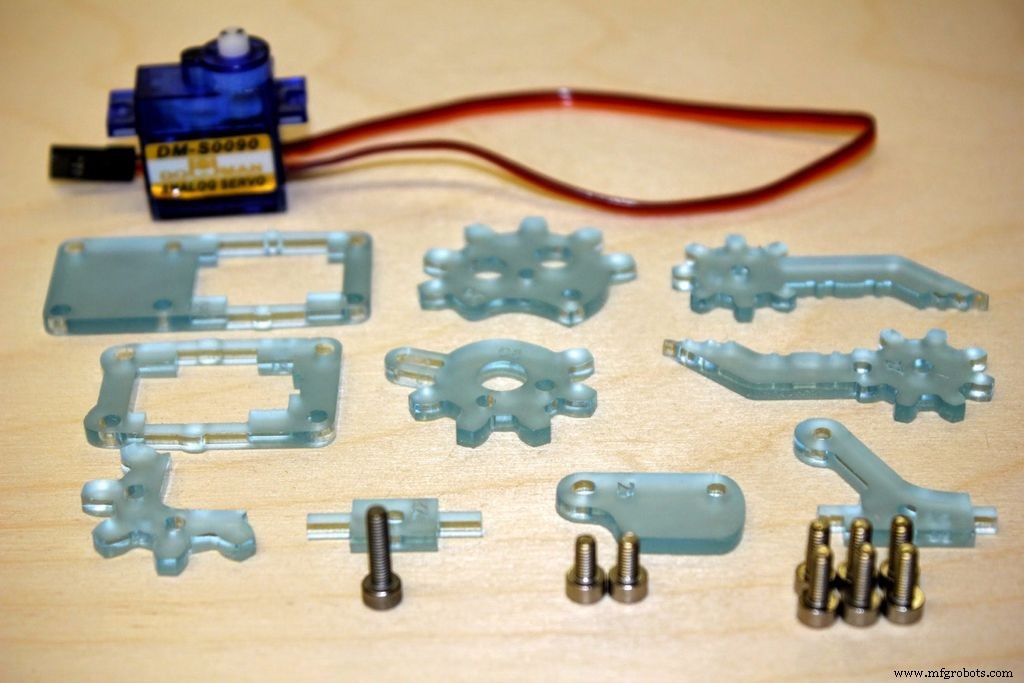
现在找到零件 #4、#5、#6、左舵机、两个 8mm 螺丝和舵机固定包。
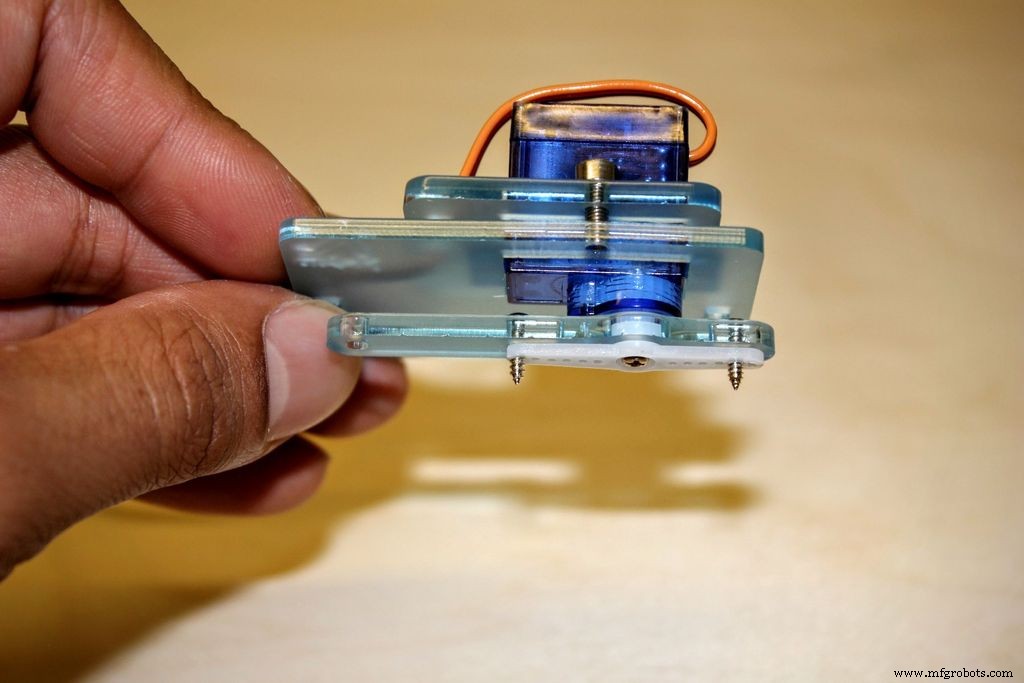
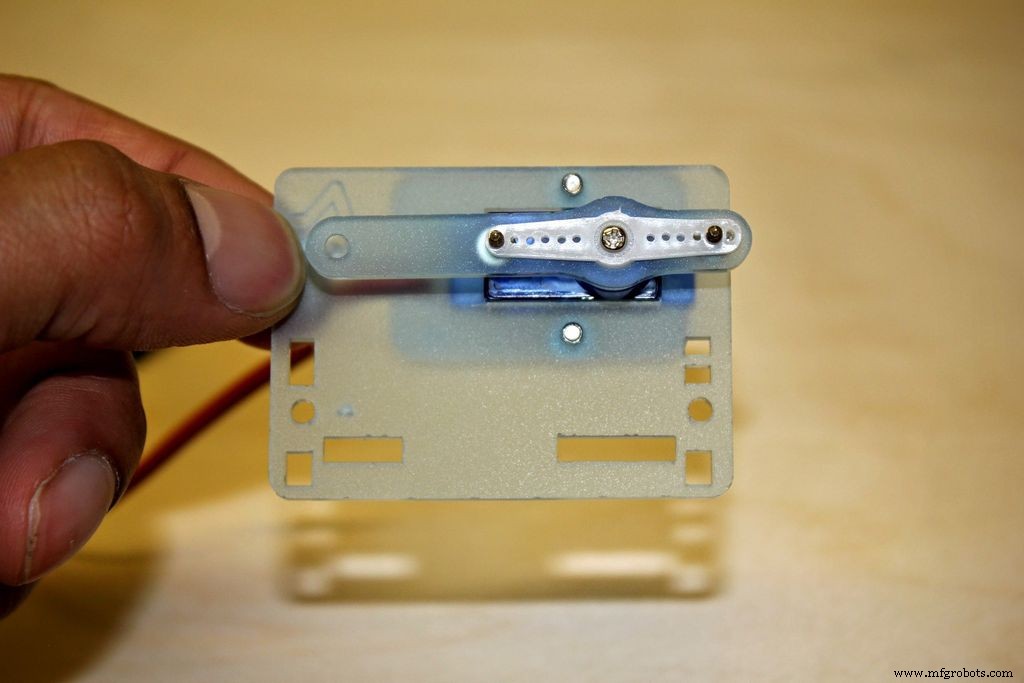
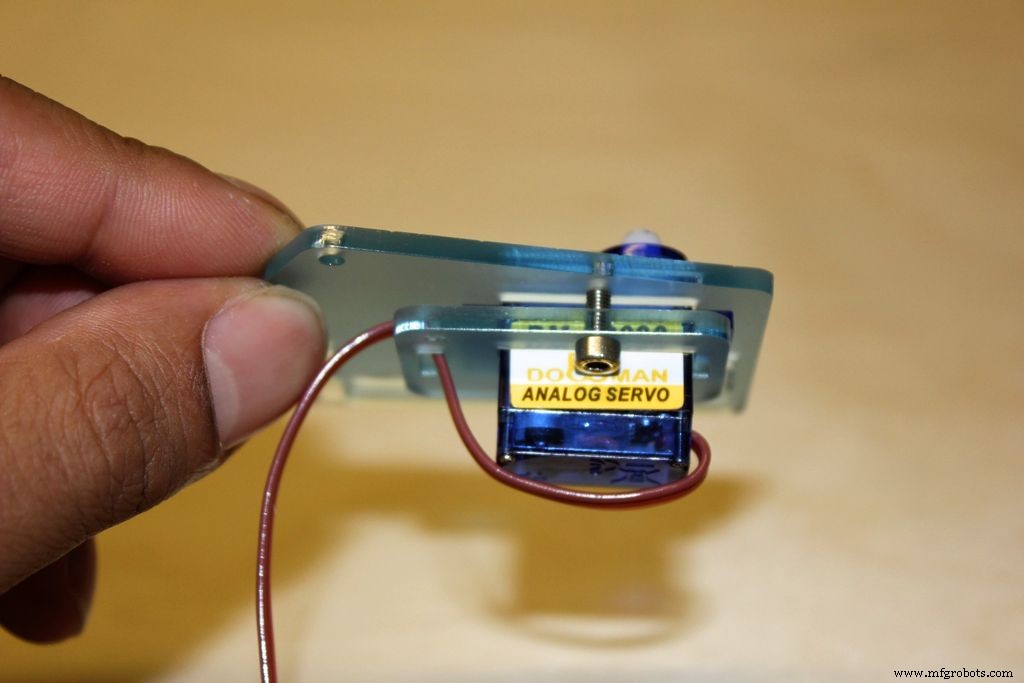
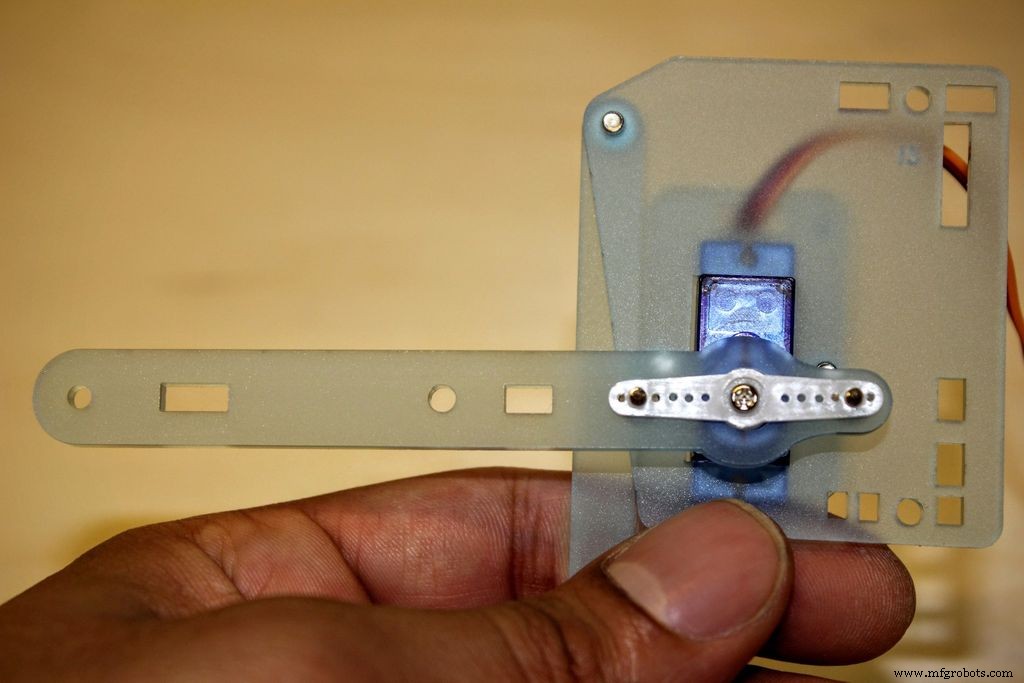
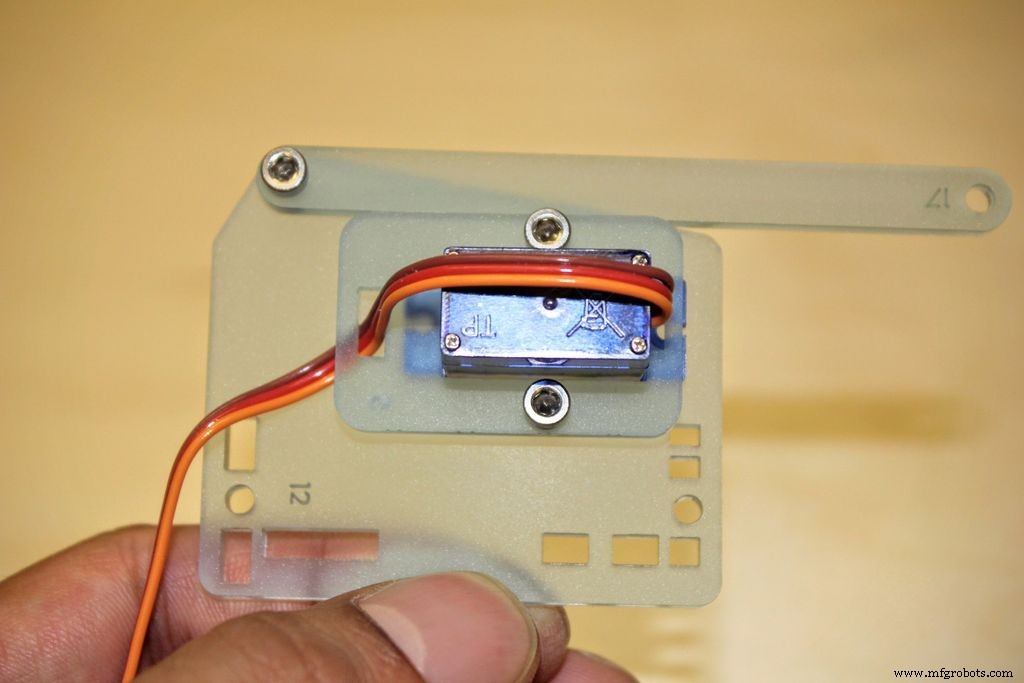
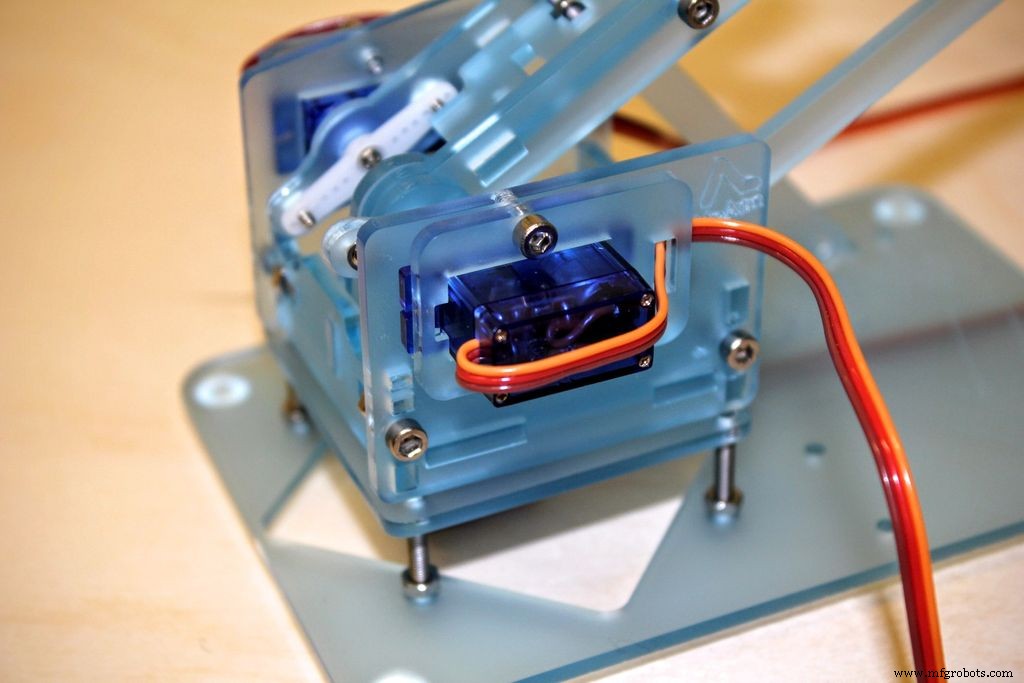
将伺服器穿过轴环(第 5 部分),然后将伺服电缆穿过电缆整理孔。使用 8 毫米螺钉将轴环拧到第 4 部分注意不要过度拧紧 .您不想让亚克力弯曲,只需将伺服器固定到位即可。
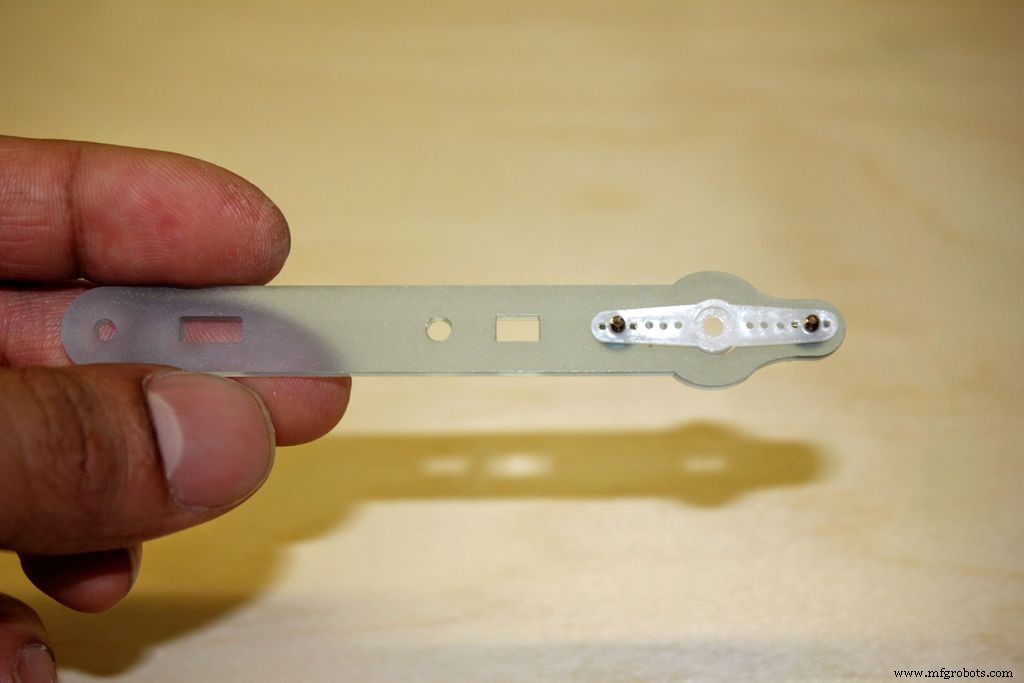
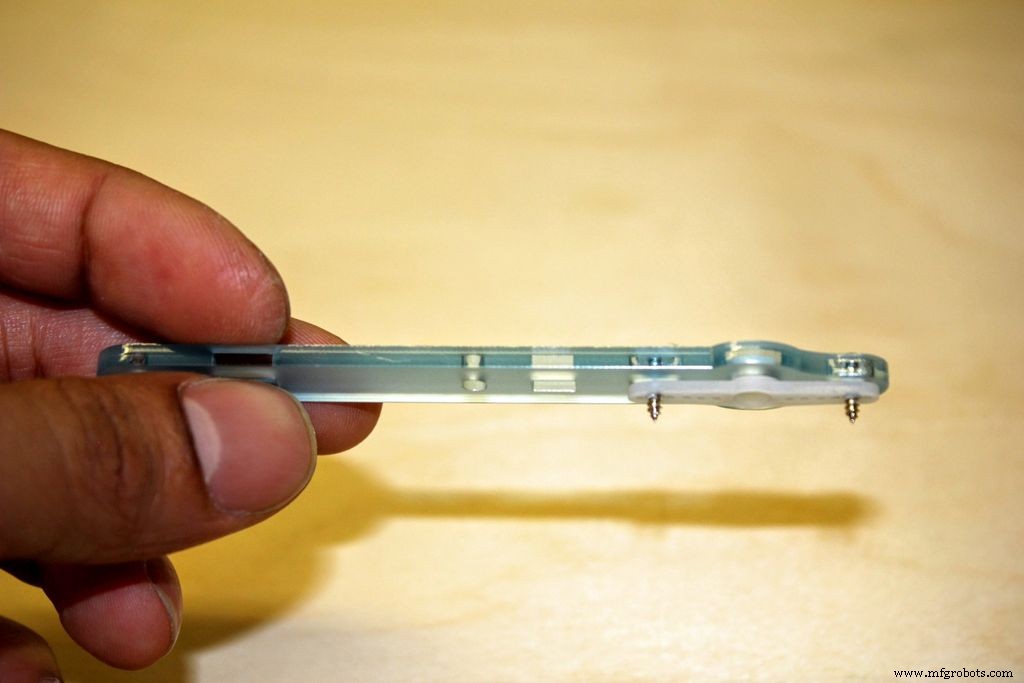
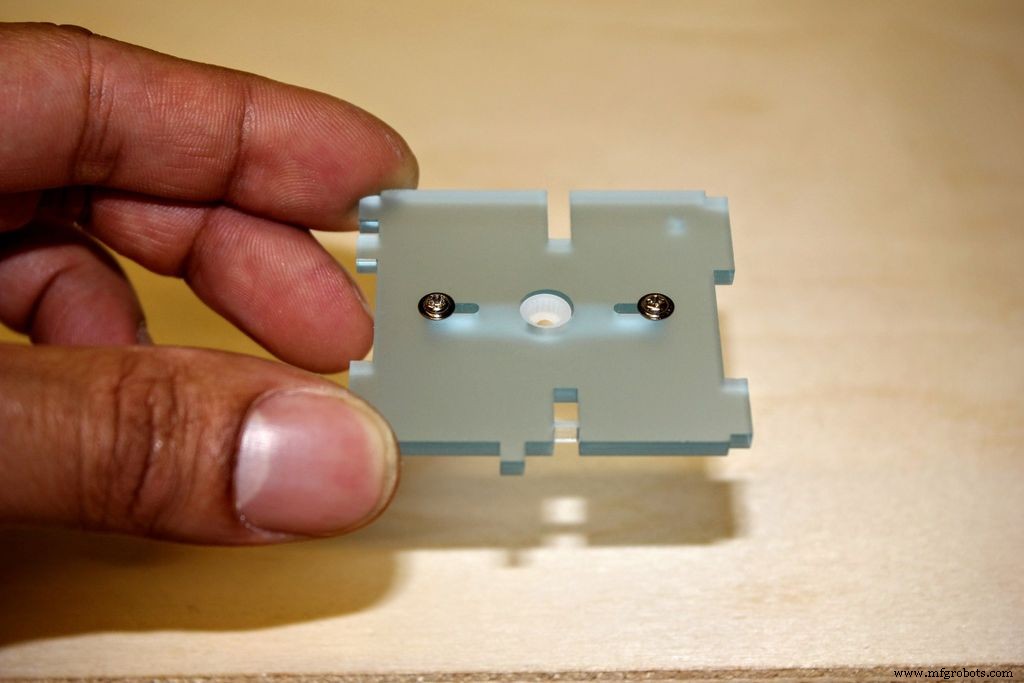
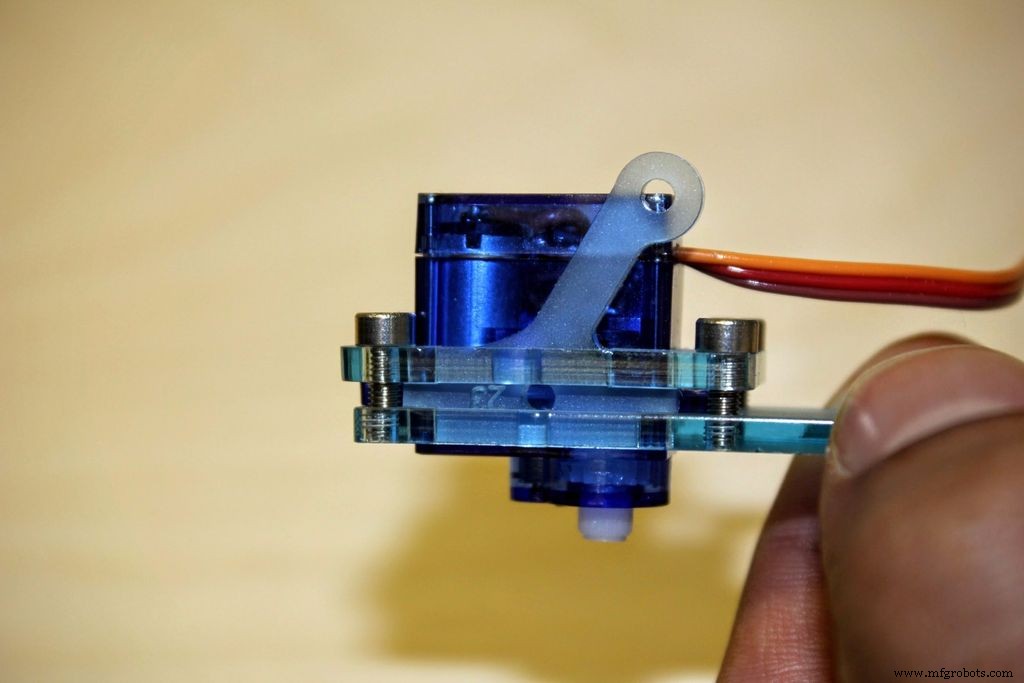
现在使用伺服固定包中的锋利螺丝将伺服固定装置(白色的东西,它们称为角)连接到伺服臂(#6)。这些将自动接入白色塑料伺服喇叭。它们可能有点棘手,所以请在这里小心。如果您正在与孩子一起建造,那么您将要参与其中。
如图所示,将舵机固定件连接到校准后的舵机上,它应该与第 4 部分的最长边平行,并且您之前画的线应该仍然匹配。使用伺服包中的小机械螺丝将其固定到伺服上,但再次不要拧得过紧!
第 5 步:右侧
我们想要的部分是:
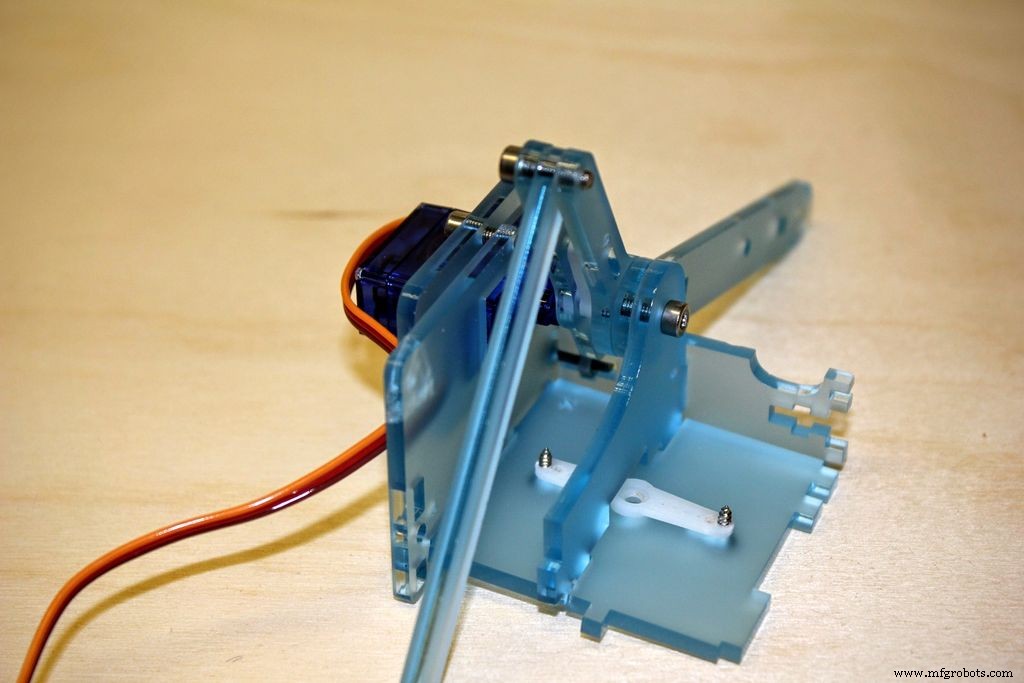
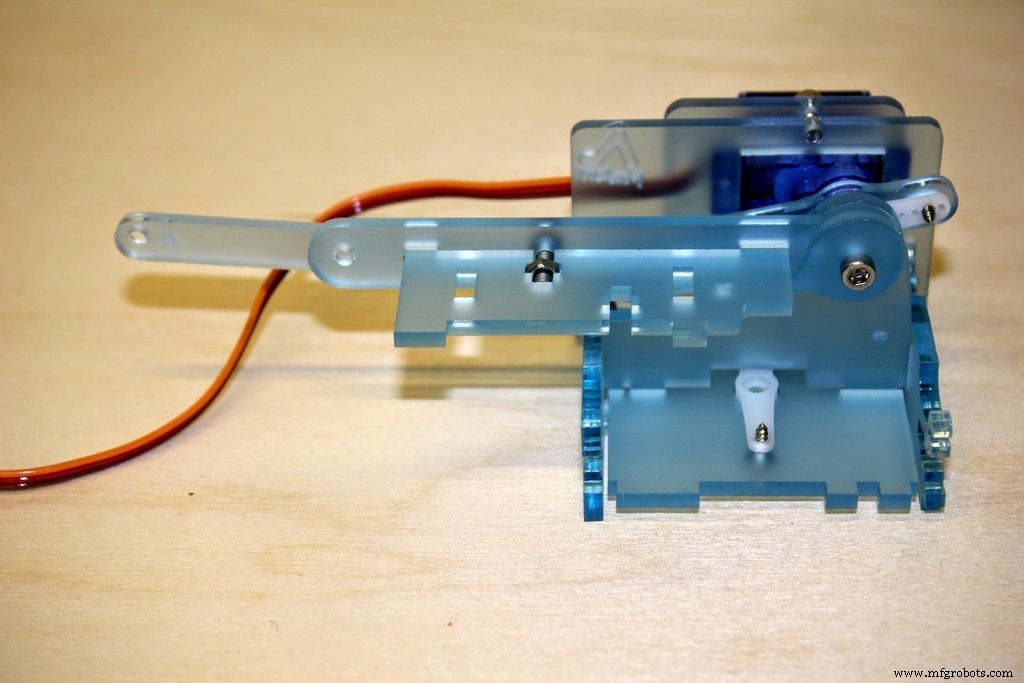
#5、#12、#13、#17、两个 8mm 螺丝、一个 6mm 螺丝、右舵机和舵机固定包。
像之前一样将伺服器穿过轴环,将电缆穿过电缆整理器,用 8 毫米螺钉连接到侧板上,再次小心不要因过度拧紧而损坏板。像以前一样使用锋利的螺丝将白色伺服喇叭连接到伺服臂(#13)。将其连接到伺服器,手臂与侧板的最长边成 90 度。再次,您制作的黑线应该对齐。
最后在这个阶段使用 6mm 螺丝将部件 #17 连接到侧板上。
第六步:构建中间
这些部分将左右部分连接在一起。我们称它们为基地和猪。
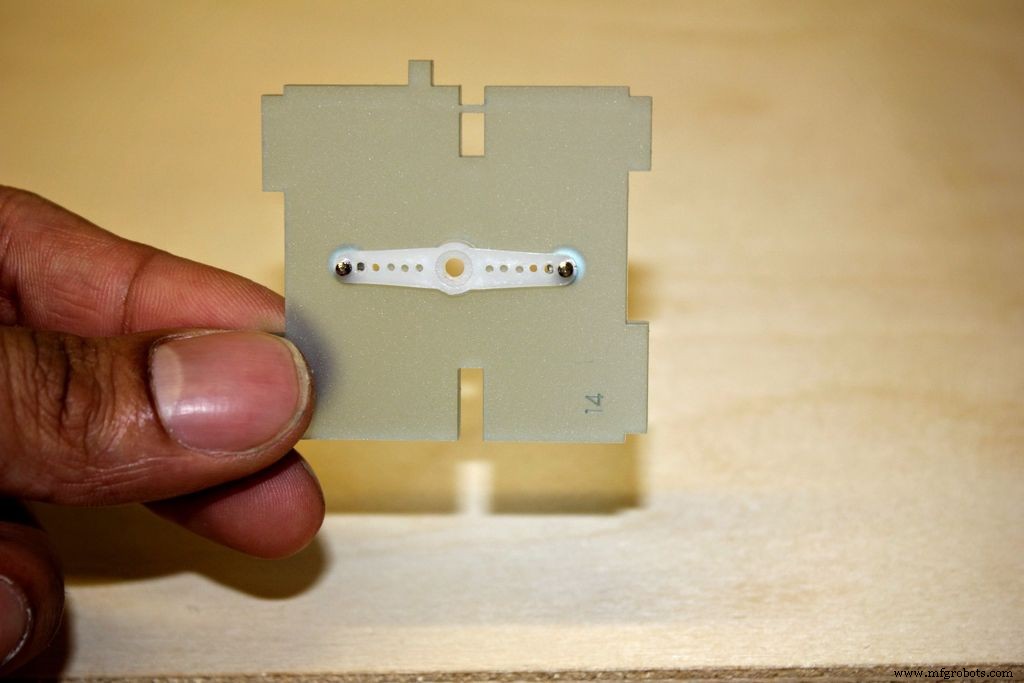
对于底座,找到第 14 部分和伺服固定装置包。仔细注意方向,使用锋利的螺丝连接伺服喇叭。在这个阶段,把它提供给左边的一块,看看你是否有正确的方法。 Poka-yoking 应该带你到这里来。
对于猪,找到零件 #8、#9、#10 和 10 毫米螺钉。按照所示顺序将它们拧在一起,应该是#9、#10、#8,螺钉从#8 侧进入并自攻入#9。抱歉,顺序令人困惑,但老实说,这是我第一次用数字写下它!重要的是,它们以直线路径围绕轴(螺钉)移动并且它们可以自由移动。如果它们没有沿直线移动,则拧松,将它们固定在一起并再次拧入,使它们尽可能平行。
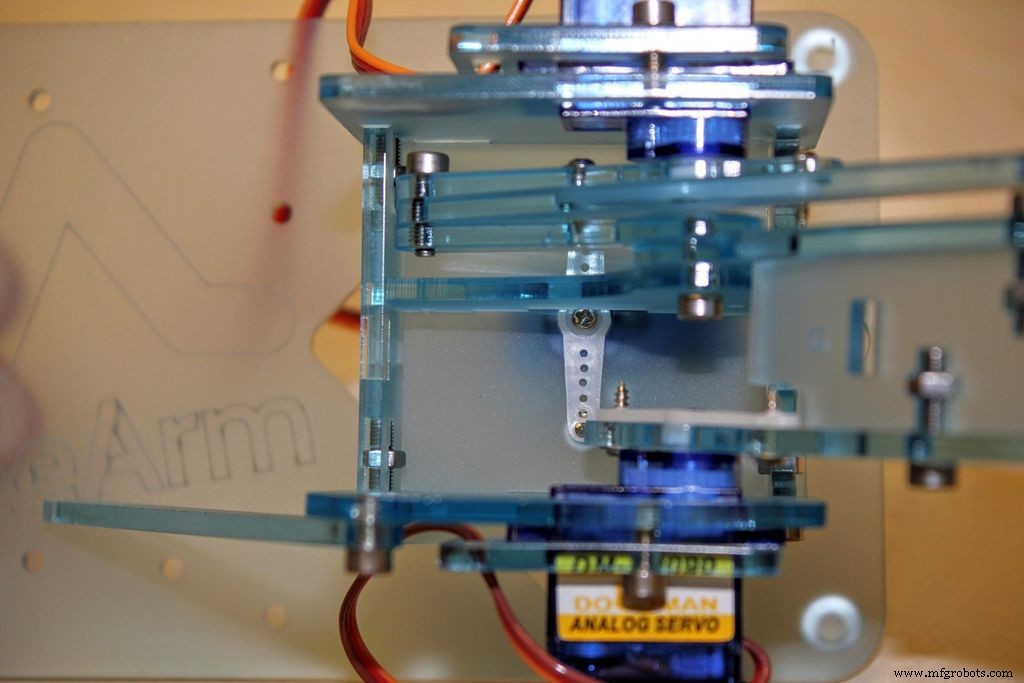
第 7 步:从左到中
现在我们要开始使用中间部分将左右部分组合在一起。
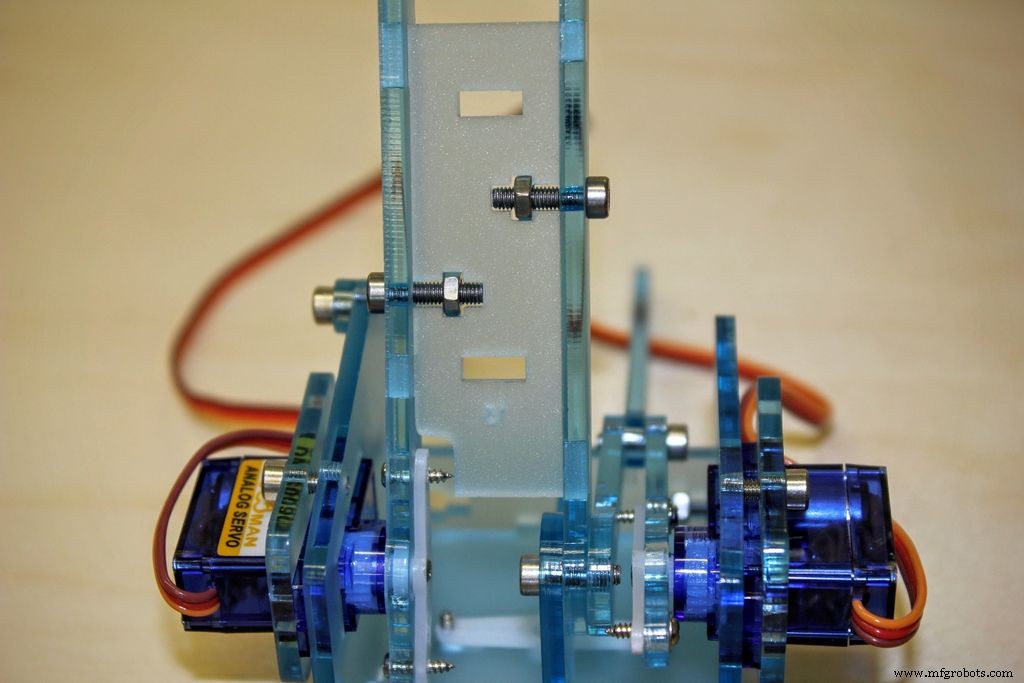
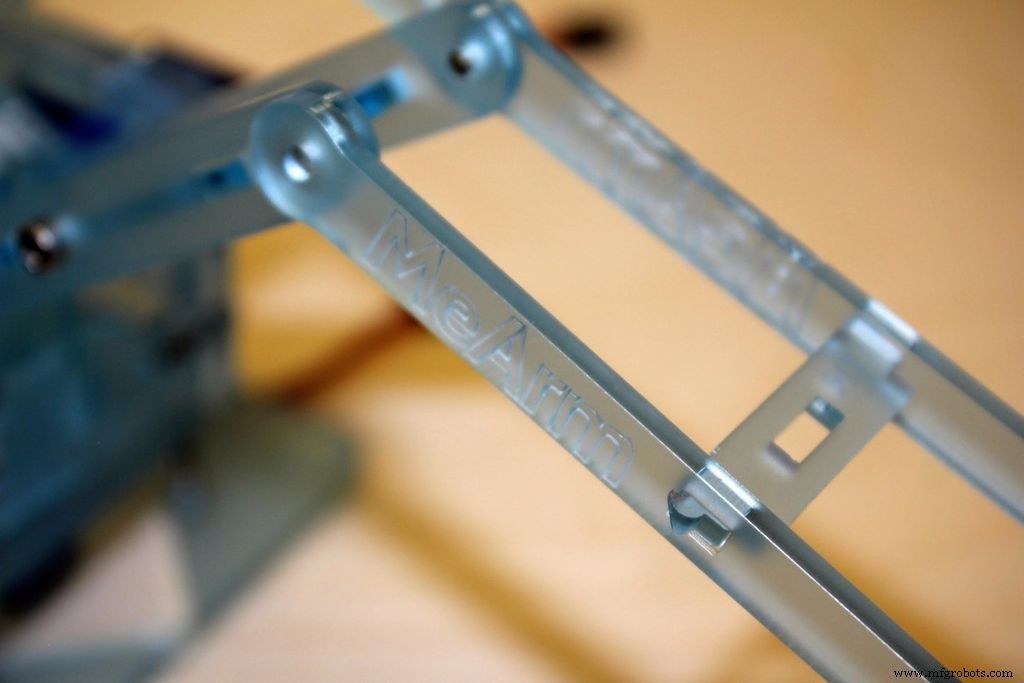
首先使用 12 毫米螺钉和螺母将左侧组件连接到零件 #7。最简单的方法是将 12 毫米螺钉穿过左侧组件并将螺母旋转半圈左右。将第 7 部分的插槽放在螺母上并开始拧紧螺钉。不要过度收紧。
您应该在第 7 部分(前支柱)上看到猪的插槽。将清管器放入槽中,然后将底座部分插入左侧组件上的槽中,并向上拉动以连接清管器上的槽。仔细检查这里的伺服喇叭,如果你把它倒过来,你以后会很生气。
清管器就位后,您可以将一个杠杆 (#17)、一个可选的垫片 (#20) 连接到伺服杆 (#6) 和清管器上的杠杆 (#9) 以及 12 毫米或 10 毫米螺钉,具体取决于你需要垫片。这里看到的 Doman 舵机不需要垫片,但我们使用的最新舵机需要。为此,我们的背包中有备件。
现在使用 12 毫米螺钉和螺母连接后支柱,部件 #11,就像在前支柱上一样。它应该插在猪的后部以及底板上的旋钮上。拧紧它,但留一点松弛,因为当您配合右手部分时,调整会派上用场。
第 8 步:附加右侧
现在我们将右侧与我们的复杂组件配对,这还涉及放置织带部件 #15。
使用 12 毫米螺钉和螺母将部件 #15 连接到部件 #10(在清管器上)。
现在将右侧连接到组件的其余部分。在尝试配对零件之前,您可以将 12 毫米螺钉和螺母穿过右侧,或者您可以将它们放在一边,然后再装上。在这里,您试图同时在插槽中获取多个零件,这可能很棘手
慢慢来,请耐心等待。这一步是整个构建中最棘手的。一旦你这样做了,我保证会变得更容易!
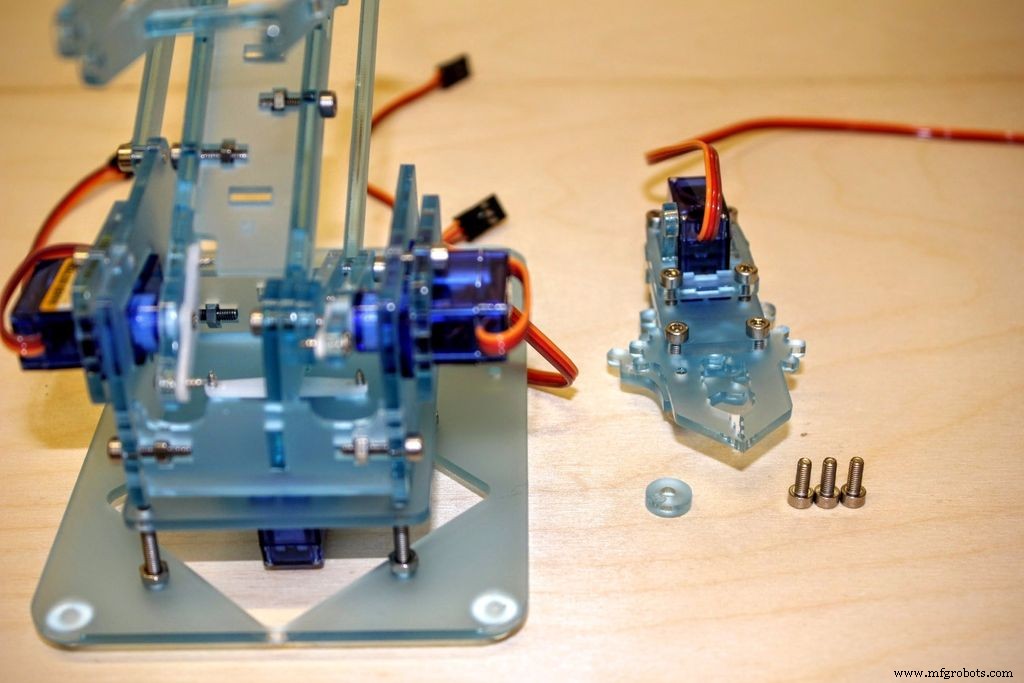
第 9 步:连接到底座,添加左前臂
现在我们完成了可爱的中心组件,我们可以将其拧到底座上。
这是将伺服喇叭与中心伺服配合并用螺钉固定的问题。
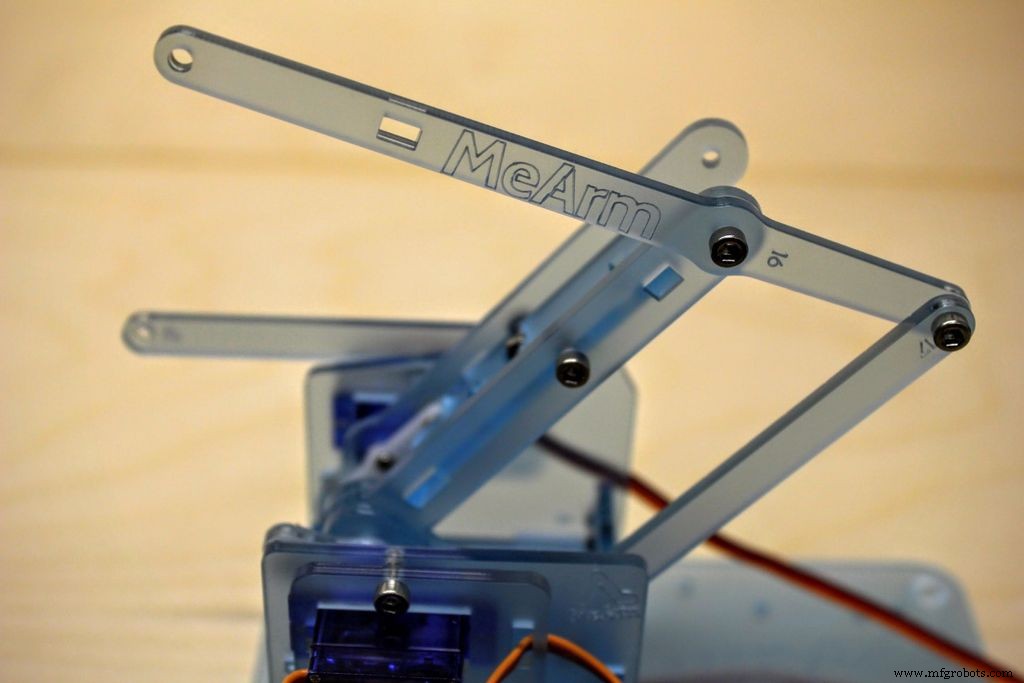
现在我们可以使用两个 6 毫米螺钉添加零件 #16。这将拧到零件 #10 和 #17 上。有了这个新零件,您应该可以轻松移动伺服器!
第 10 步:右前臂


接下来,我们建立右前臂。
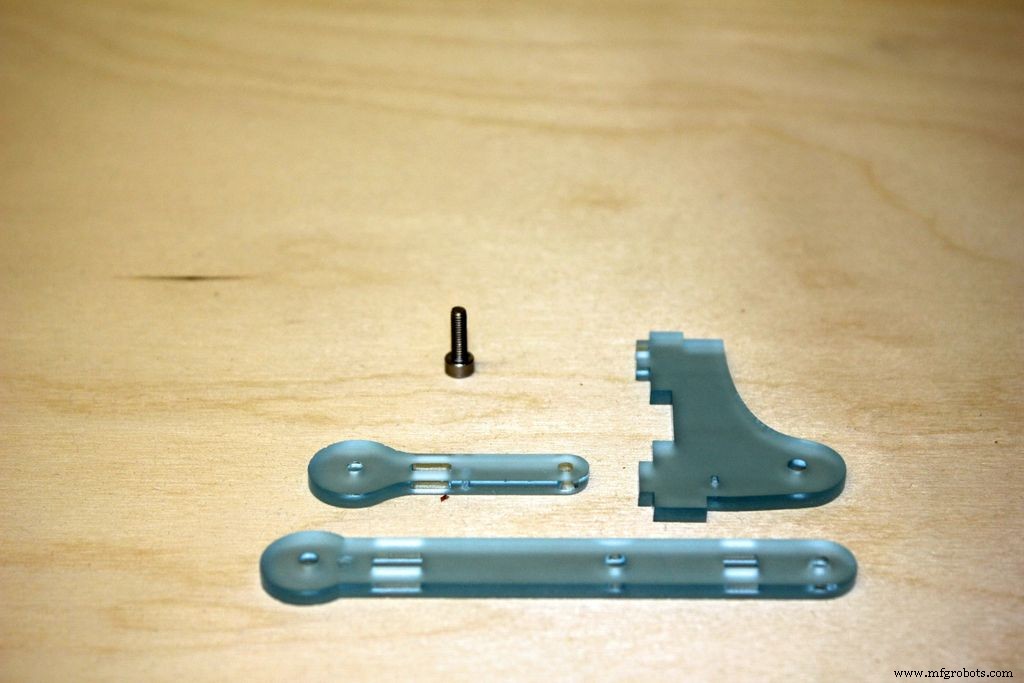
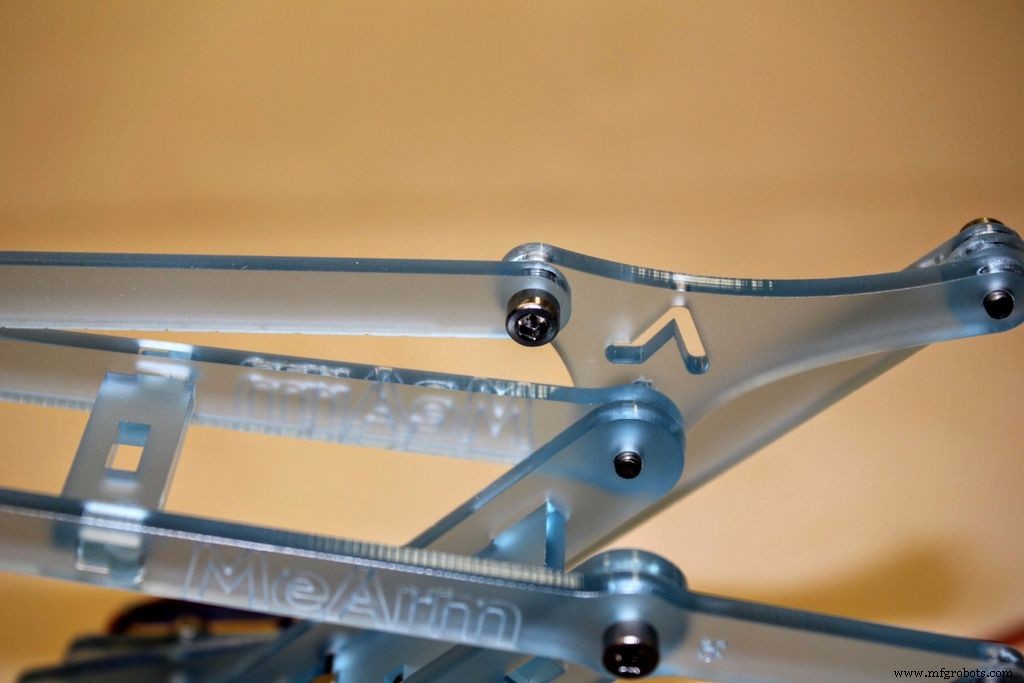
首先要做的是将部件 #18 钩在您刚刚连接的左前臂部件上,然后钩在右前臂上,我们将其称为部件 #31,因为它似乎没有编号!
用 10 毫米螺钉将三角形部件 #19 连接到部件 #31 和部件 #13(连接到伺服的钻头)。不要过度拧紧,因为我们需要所有这些部件自由移动。
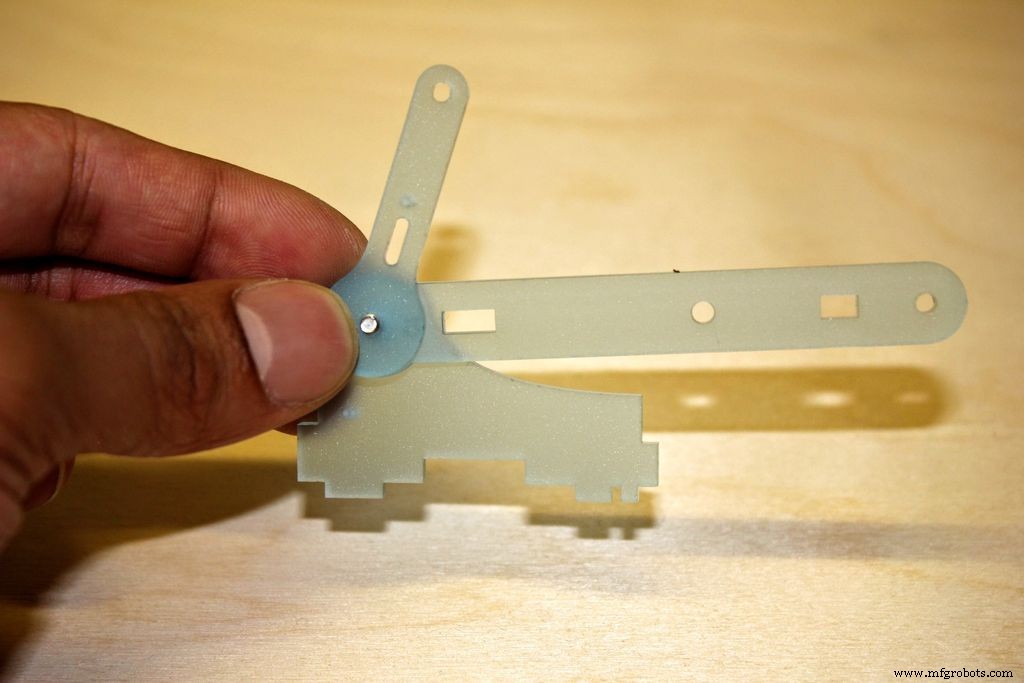
将零件 #19 的背面连接到右侧头盖上的零件 #17,使用 10 毫米螺钉和中间的垫片 (#20)。
然后用 6 毫米螺丝将最终零件 #17 连接到零件 #19 的内侧前部。
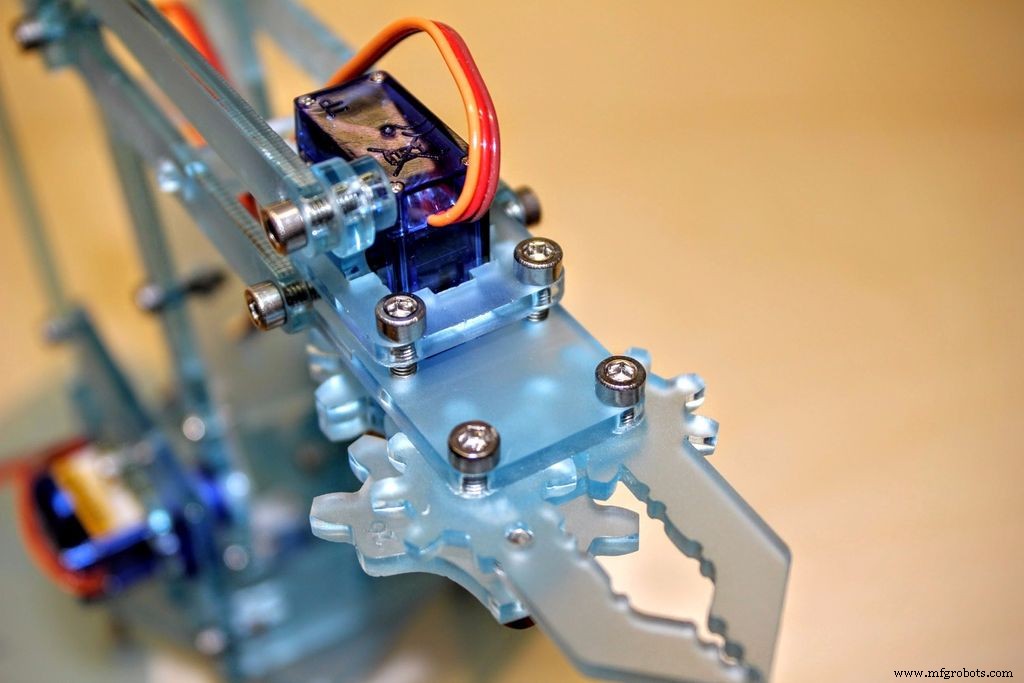
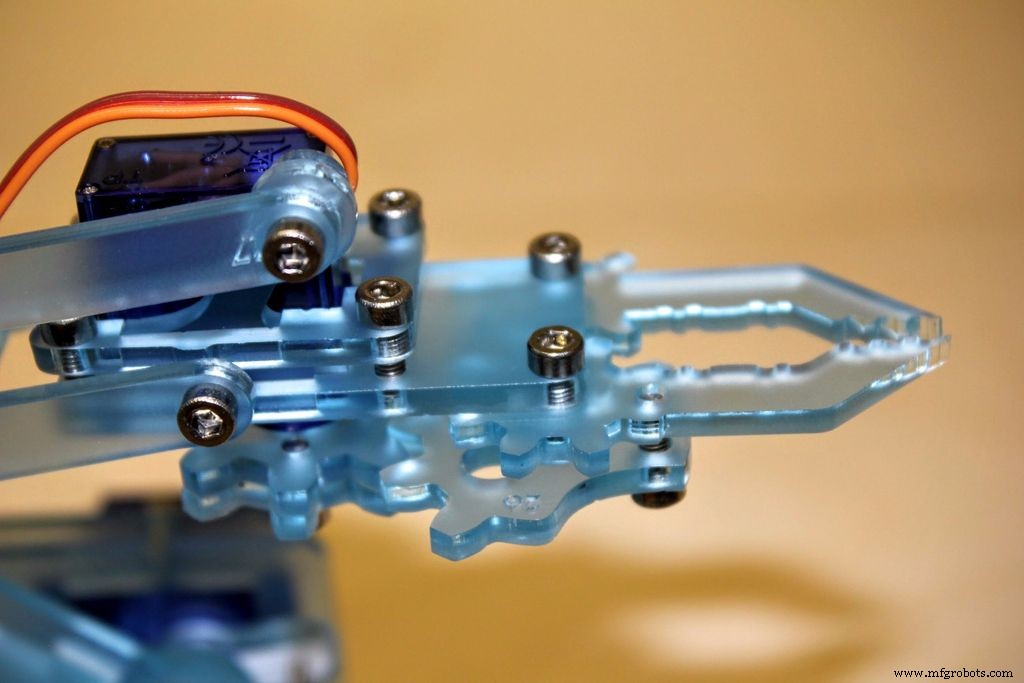
第 11 步:构建爪子!
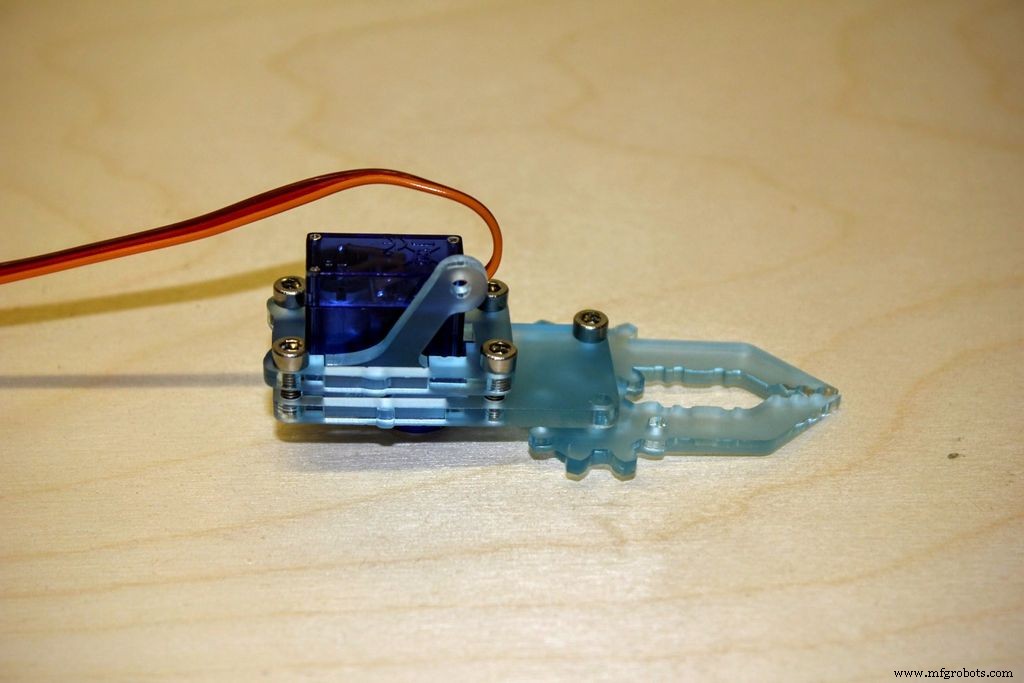
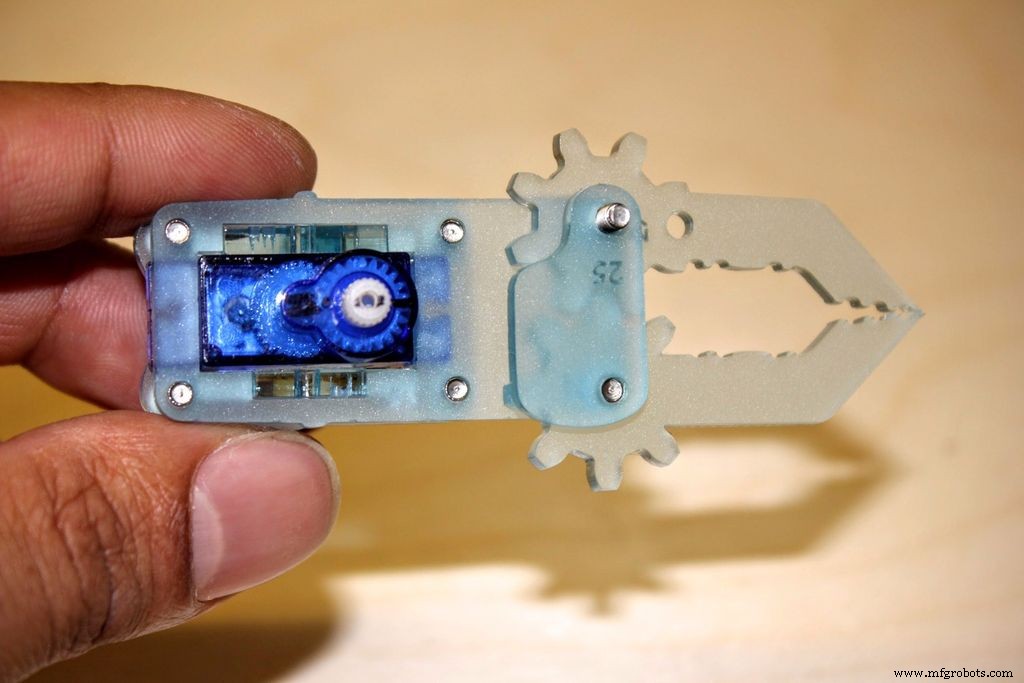
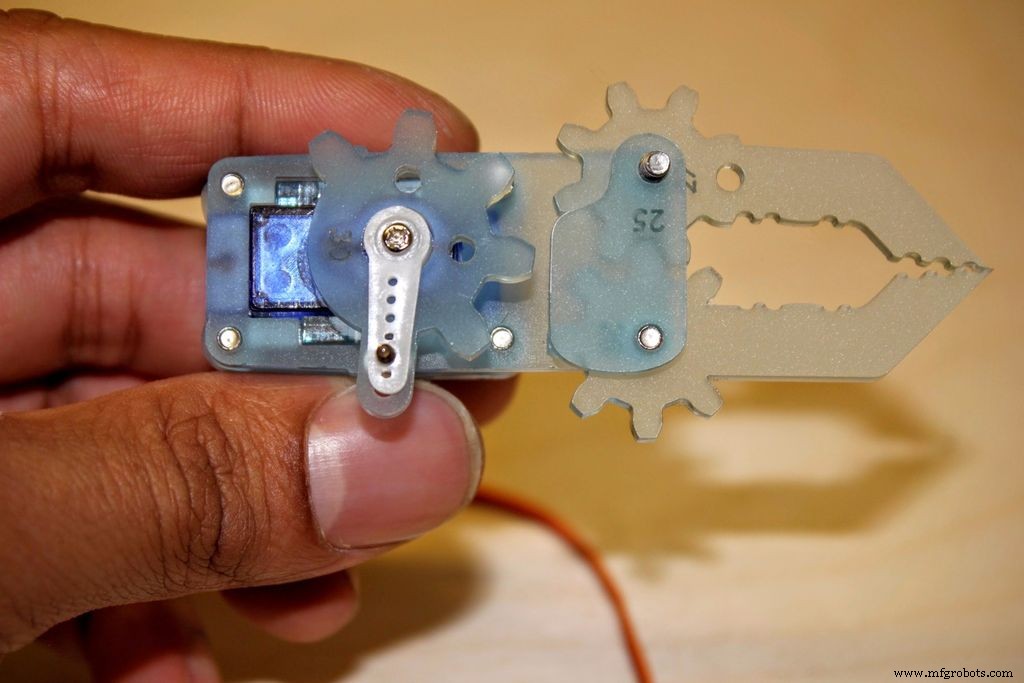
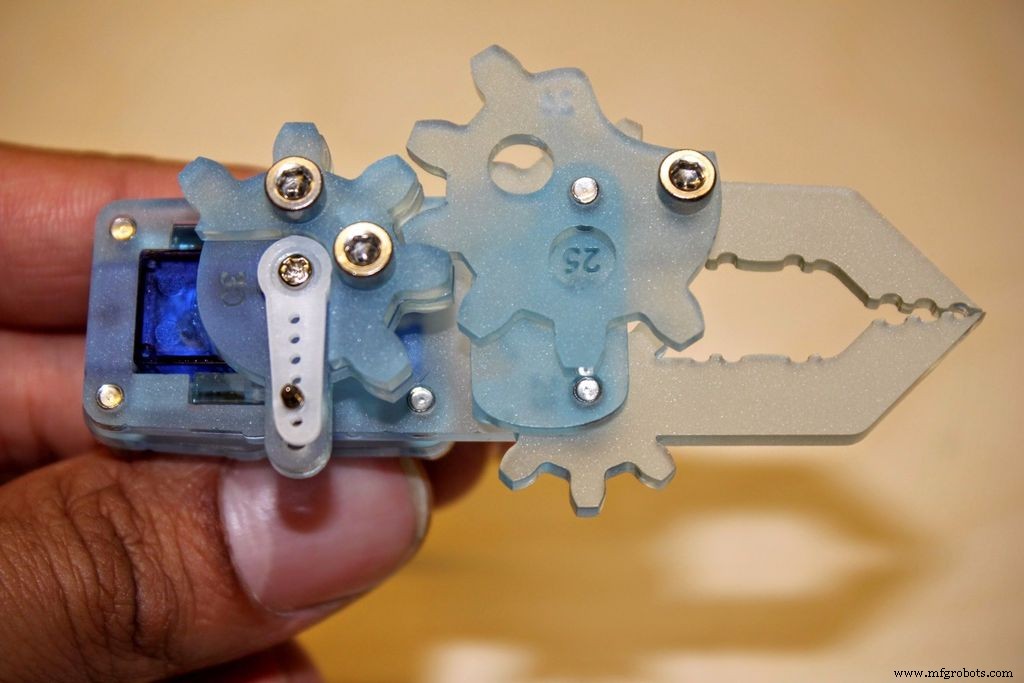
将伺服器穿过剩余的轴环,#21。将零件 #22 和 #23 插入由伺服和零件 #21 制成的侧槽,然后使用零件 #24 用四个 8 毫米螺母将它们固定。再次小心,我们快到了,你不想破坏任何东西。
在最后一个螺丝就位之前,接下来的零件会有点不固定,所以如果您现在掉了东西,请不要担心。使用 8 毫米螺钉将部件 #28 通过头部组件上的左侧孔固定到部件 #25 中。然后使零件 #27 上的齿轮啮合,并通过它、头部组件和零件 #25 放置一个 12 毫米螺钉。这还不安全,但可以保持在一起。
将伺服喇叭连接到部件 #30 并使用机械螺钉将其固定到伺服。使用两个 6 毫米螺钉将 #29 连接到 #30。
现在您可以将 #26 连接到松动的 12 毫米螺钉上,并使用 8 毫米螺钉将其固定到部分 #27 的额外孔中。
第十二步:添加头部
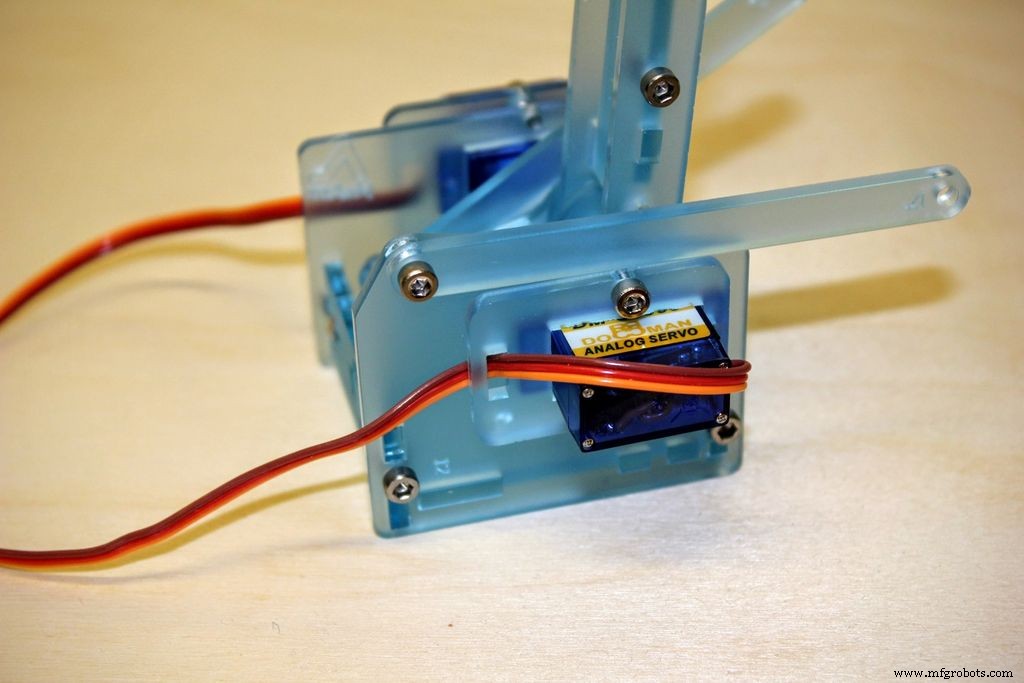
最后一部分是连接头部。
这是由两个 8 毫米螺钉穿过前臂固定到头部的 #22 和 #23 部分。可能更容易松开头舵机夹上的8mm螺丝。
现在打开并播放!
第 13 步:故障排除
此部分将随着时间的推移填写常见问题。如果您有,请告诉我们,我们可以添加。
左伺服臂出现卡住。通常这归结为僵硬的关节。头部组件附件是人们忘记的一个。
代码
- 无标题文件
无标题文件Arduino
#include舵机中、左、右、爪; // 创建 4 个“伺服对象” void setup() { Serial.begin(9600);中间.附加(11); // 将引脚 11 上的伺服器连接到中间对象 left.attach(10); // 将引脚 10 上的伺服器连接到左侧对象 right.attach(9); // 将引脚 9 上的伺服器连接到正确的物体爪.attach(6); // 将引脚 6 上的伺服器连接到爪形对象} void loop() { middle.write(90); // 根据值(度)设置舵机位置 left.write(90); // 做同样的事情 right.write(90); // 再次claw.write(25); // 是的,你已经猜到了 delay(300); // 不会不断更新可以炸掉它们的舵机}
Codebender
https://codebender.cc/sketch:148456定制零件和外壳
制造工艺