

使用 Arduino 的 DIY 洗手液分配器
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
 |
|
应用和在线服务
 |
|
关于这个项目



在当前全球爆发的情况下,世卫组织建议 (世界卫生组织)保持健康 洗手和卫生习惯,但主要问题是我们这样做的方式,即身体接触瓶子, 简而言之,这不符合我们的目的,因此在本教程中,我们将学习如何制作 D.I.Y。基于 Arduino 的肥皂或洗手液分配器。
补给:
电子:
- Arduino Nano(或任何 Arduino)。
- 超声波传感器 (HC-SR04)
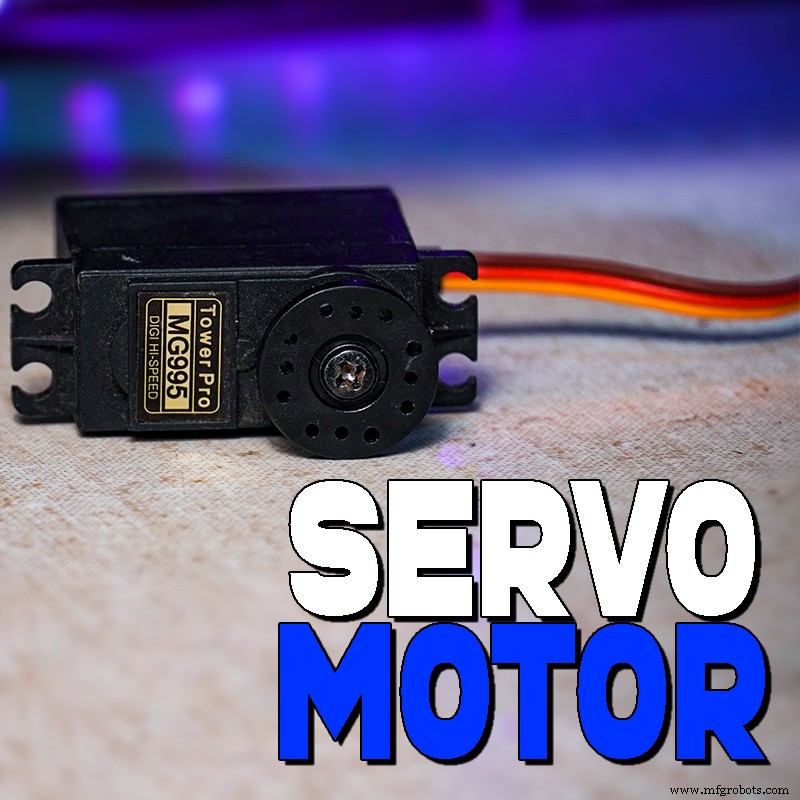
- 伺服电机(首选金属齿轮)。
- 跳线(母对母)。
工具:
- 热胶枪。
- 计算机或笔记本电脑。
其他:
- 酒精类洗手液或消毒剂。 (最重要)
- 自攻螺钉(1 个)。
- 0.8 毫米铜线(0.5 米)。
- 塑料容器(可轻松放入所有物品)
- 固定(标记和标尺刻度)。
第 1 步:观看视频
第 2 步:选择液体

首先,也是最重要的,我们需要按照 W.H.O. (世界卫生组织)在此处查找更多信息。
对于此版本,获得正确类型的分配器非常重要,因为我们只是在制作分配器而不是打印整个机构,因此我们需要在分配器或推式瓶中使用酒精或洗手液。
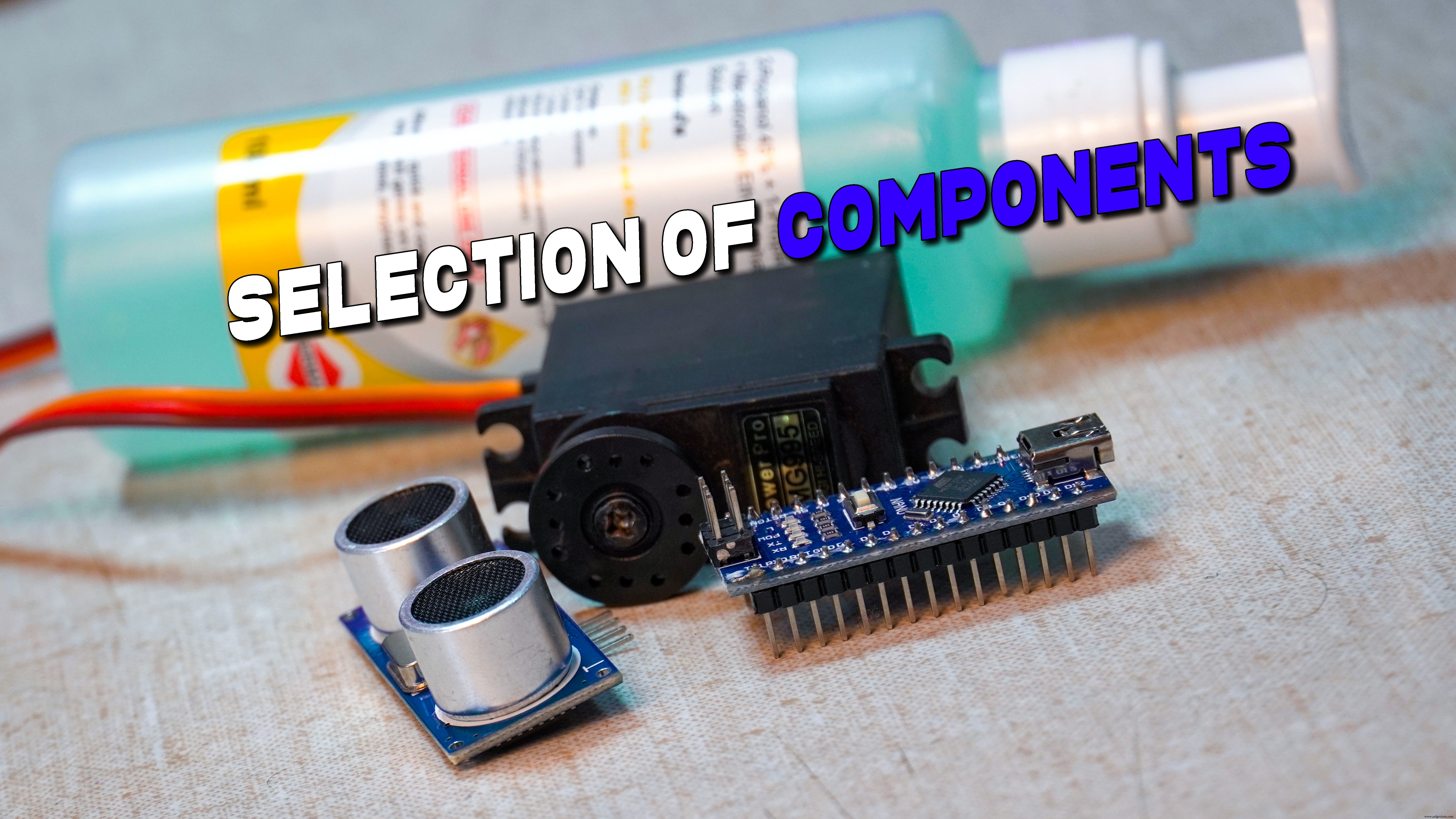
第 3 步:选择组件

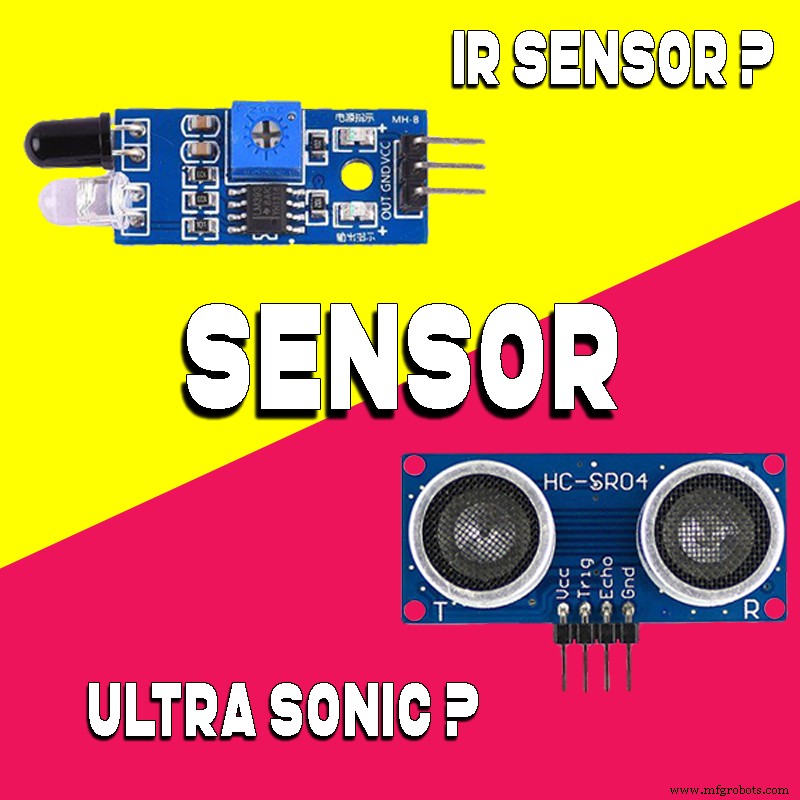
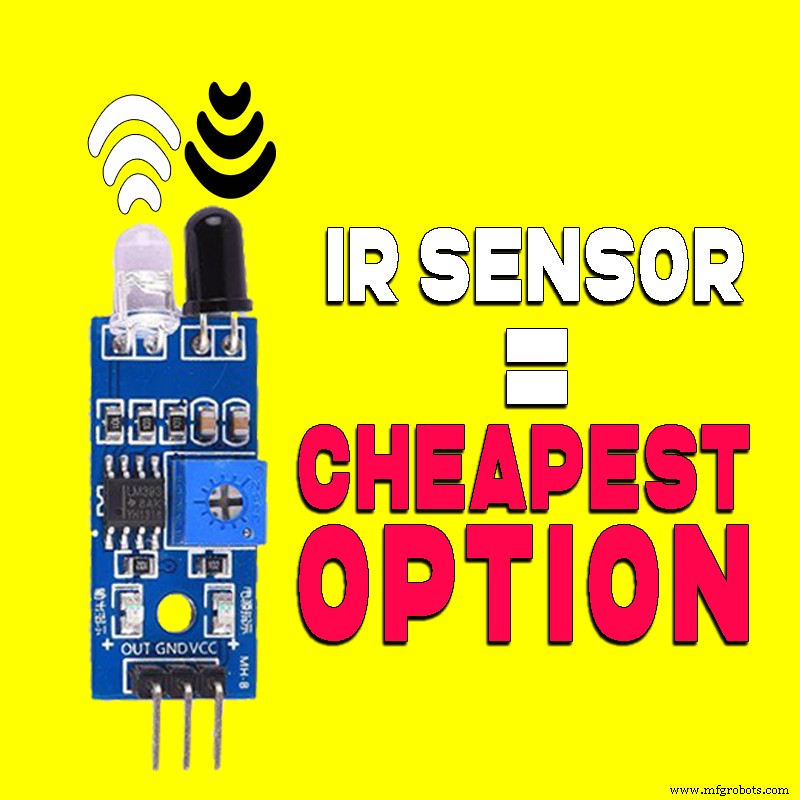
传感器:
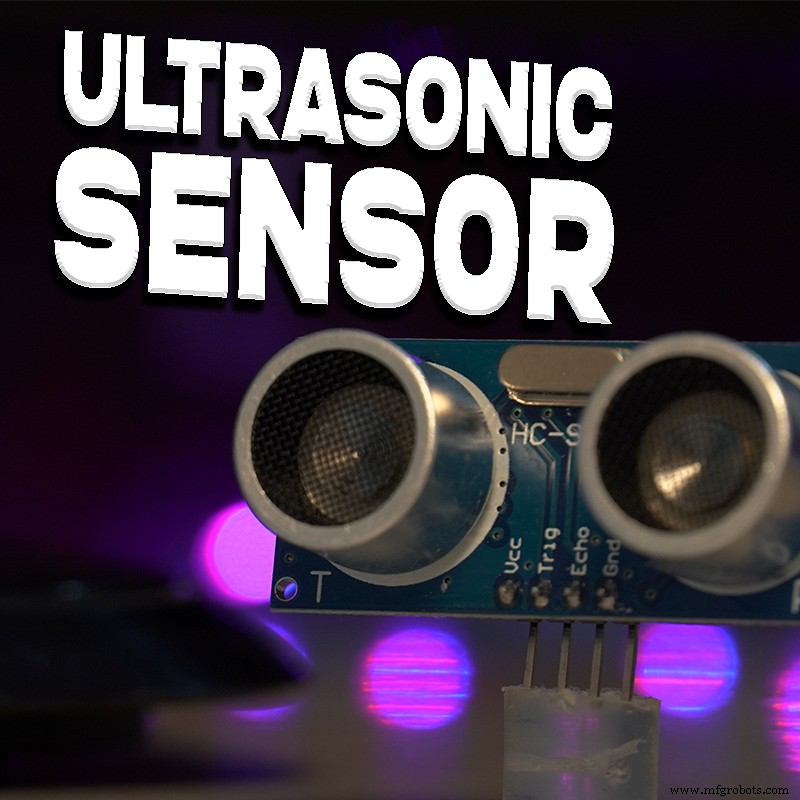
我们将需要一个传感器来感应我们的接近度或存在感,它基本上将充当该系统的触发器或无接触开关。我们在这里有两种选择,即我们可以使用红外传感器模块或超声波传感器模块。我们可以使用 IR sensor Module,这基本上是一个便宜且高效的选项,但有时不准确,或者我们可以使用 HC-SR04 超声波传感器,它在 2 厘米范围内非常准确,并且稍微昂贵的选项,但我们会使用超声波传感器对于本教程,为了更好的准确性。
电机:
用于运动或处理 输出 ,我们可能需要一个泵 , 要么电机 ,或一些将电信号转换为机械置换酒精基洗手液或消毒剂通过分配器的电子元件,最好的选择是使用带有金属齿轮的伺服电机以获得最大扭矩。我们将避免使用微型泵,因为它们要插入容器中,这又会造成易受攻击的收容点。因此,使用外部机构配合伺服将是一个明智的选择。
微控制器:
对于这个项目构建,我们需要一个微控制器 控制 输入 和输出 , 计算距离或sense 触发器 在我们的示例中,来自 Sensor 并以 Servo Sweep 的形式处理输出,为此我们可以使用任何 arduino,这样可以轻松调整参数、微调输出,因此您可以使用任何 Arduino,我们将使用 Arduino Nano 作为我们的工作案例。
第 4 步:了解机制
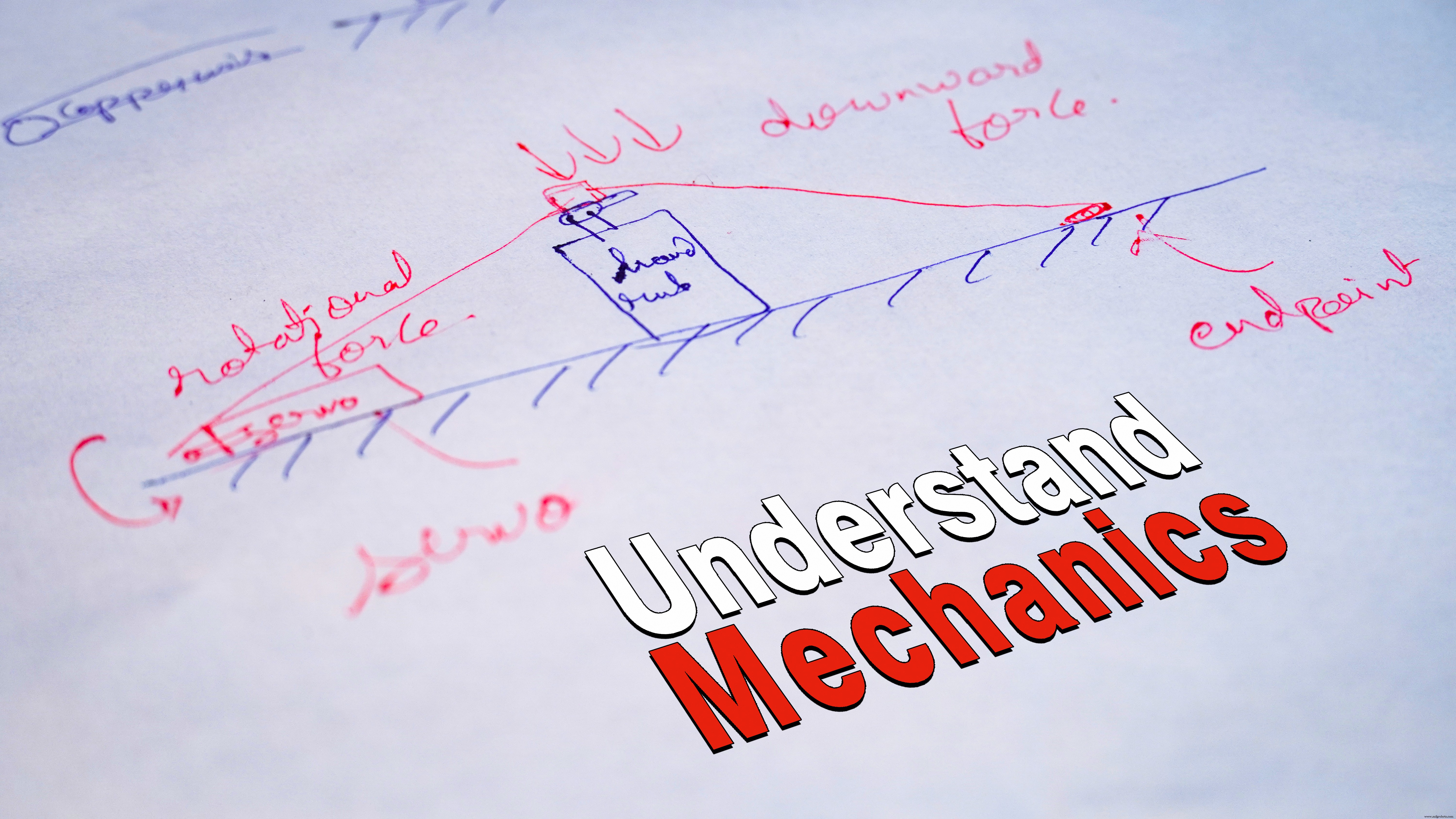
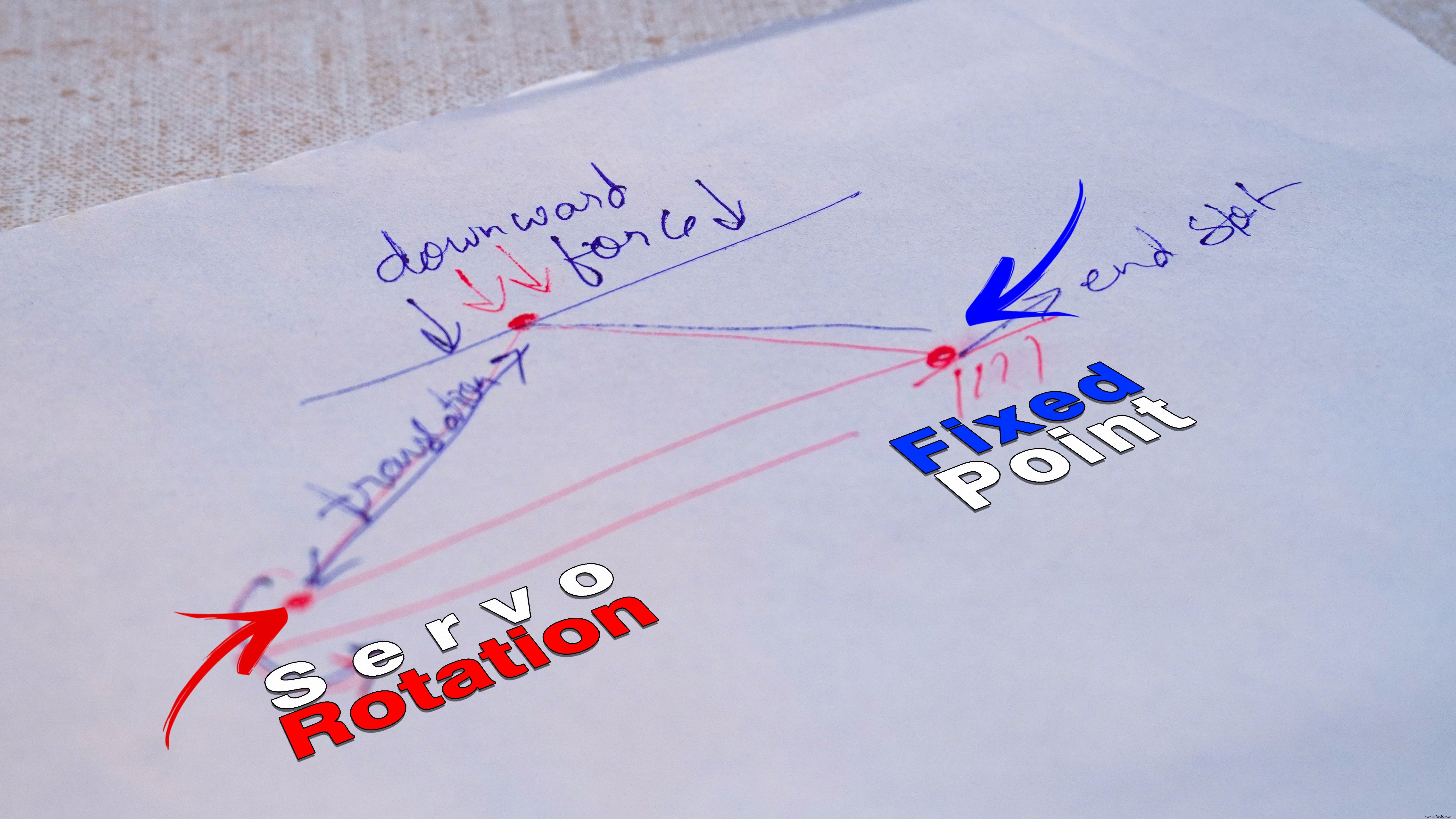
在开始制作之前,让我们先了解一下机械布置。我们需要一个机制 这将产生将喷嘴向下推的力 并分配液体,因为我们使用的是提供圆周运动的伺服电机,它本身不能产生向下的力,我们需要某种机械装置来实现它,我们将使用滑轮机构来固定一端和将旋转力转换为推力,我们可以用铜线创建一个向下的矢量力进行传递,它的基本作用是将伺服的圆周力转换为向下的作用力矢量,以模拟推力。但这一切听起来很复杂,所以让我们一点一点地执行这个任务,按照进一步的步骤
第 5 步:连接
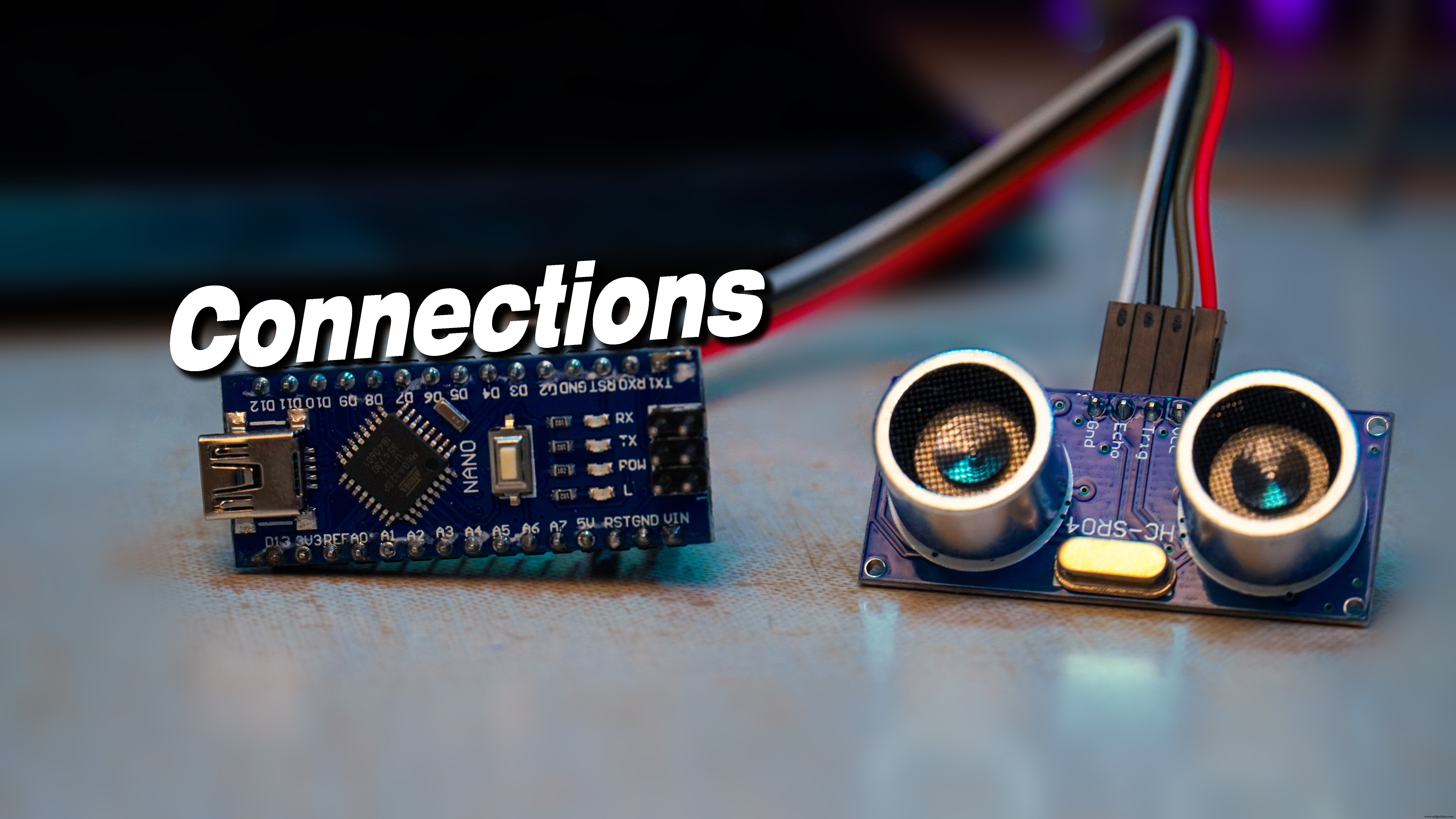
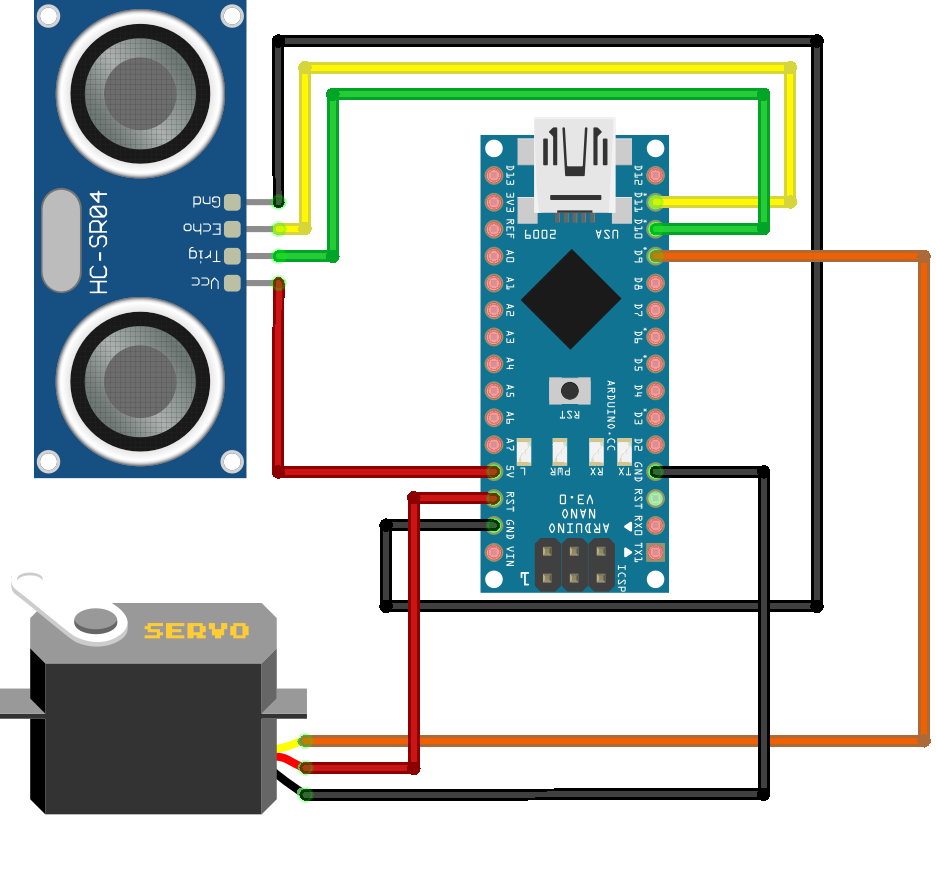
此版本的连接非常简单!
Arduino 传感器:
触发到 D10
回声到D11
Vcc 到 Vcc
地对地
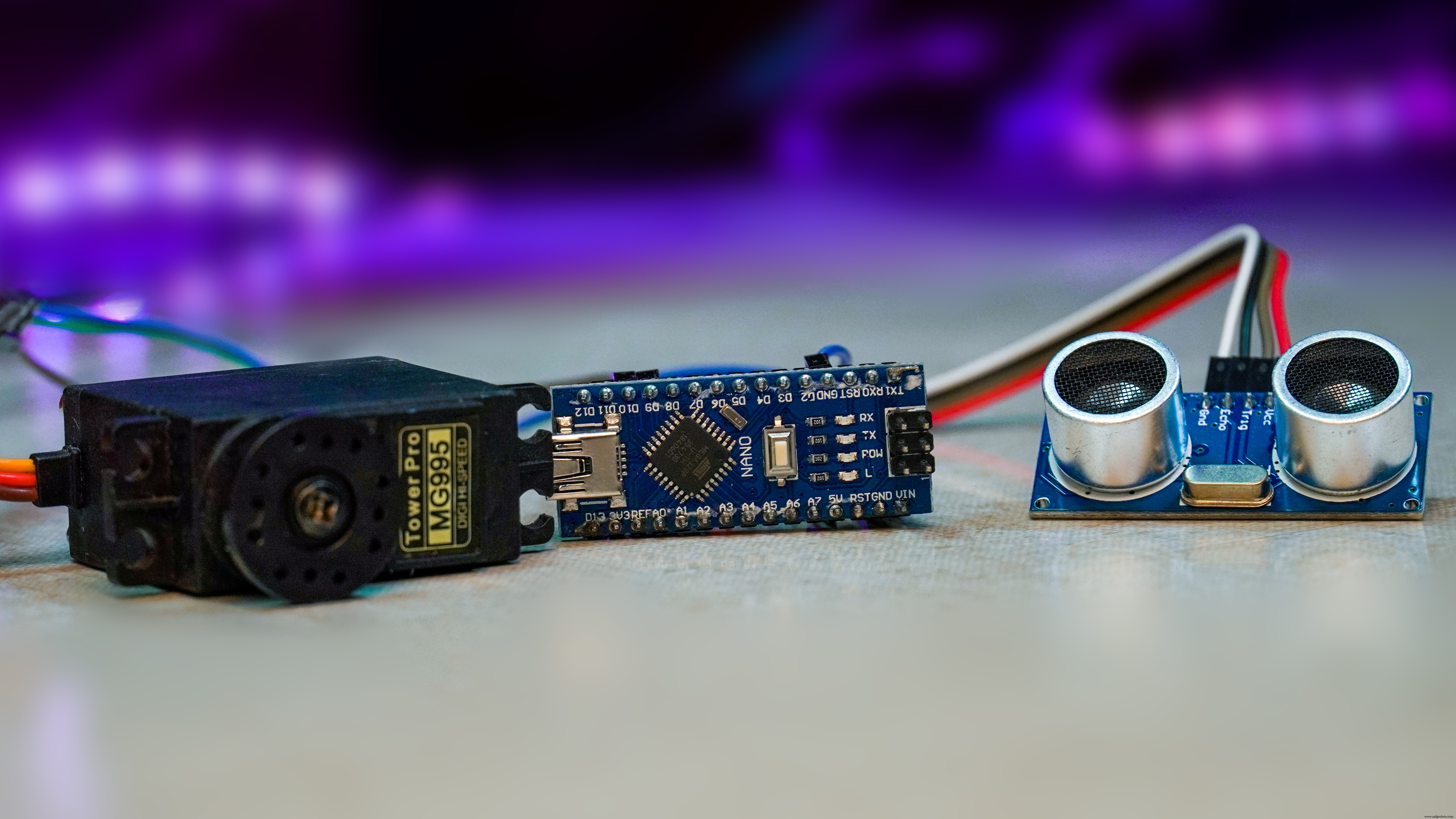
伺服到 Arduino:
给 D9 的信号
Vcc 到 Vin
地对地
(可以参考 这篇文章 超声波的基础知识和工作, 还可以查看 www.utsource.net 以获取组件)
连接.fzz
第 6 步:将伺服器连接到底座



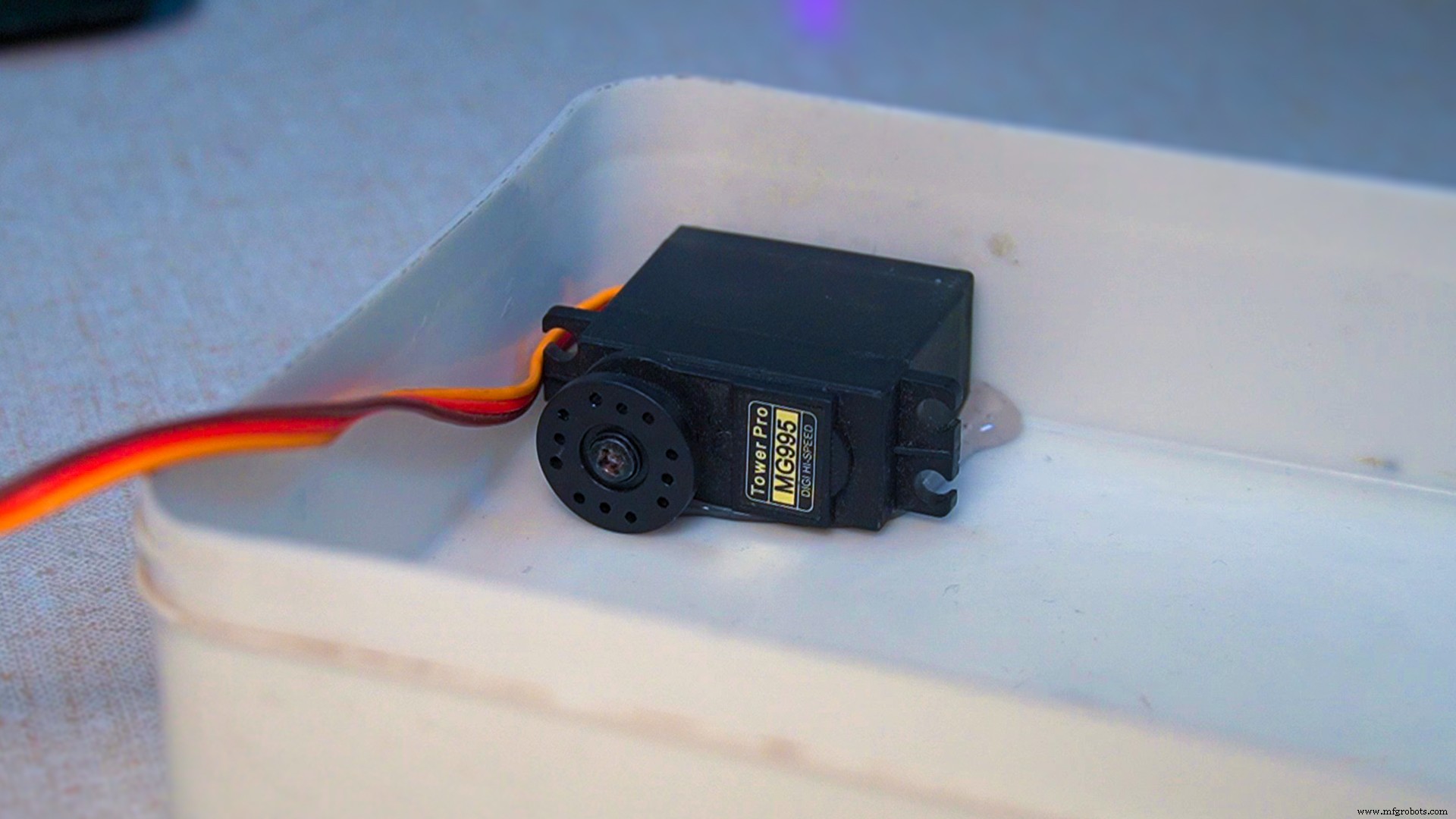
机械布置的第一步是使用热胶将伺服电机固定在盒子内部的一个刚性表面上
(使用热胶时要小心)
第七步:将铜线穿过伺服臂
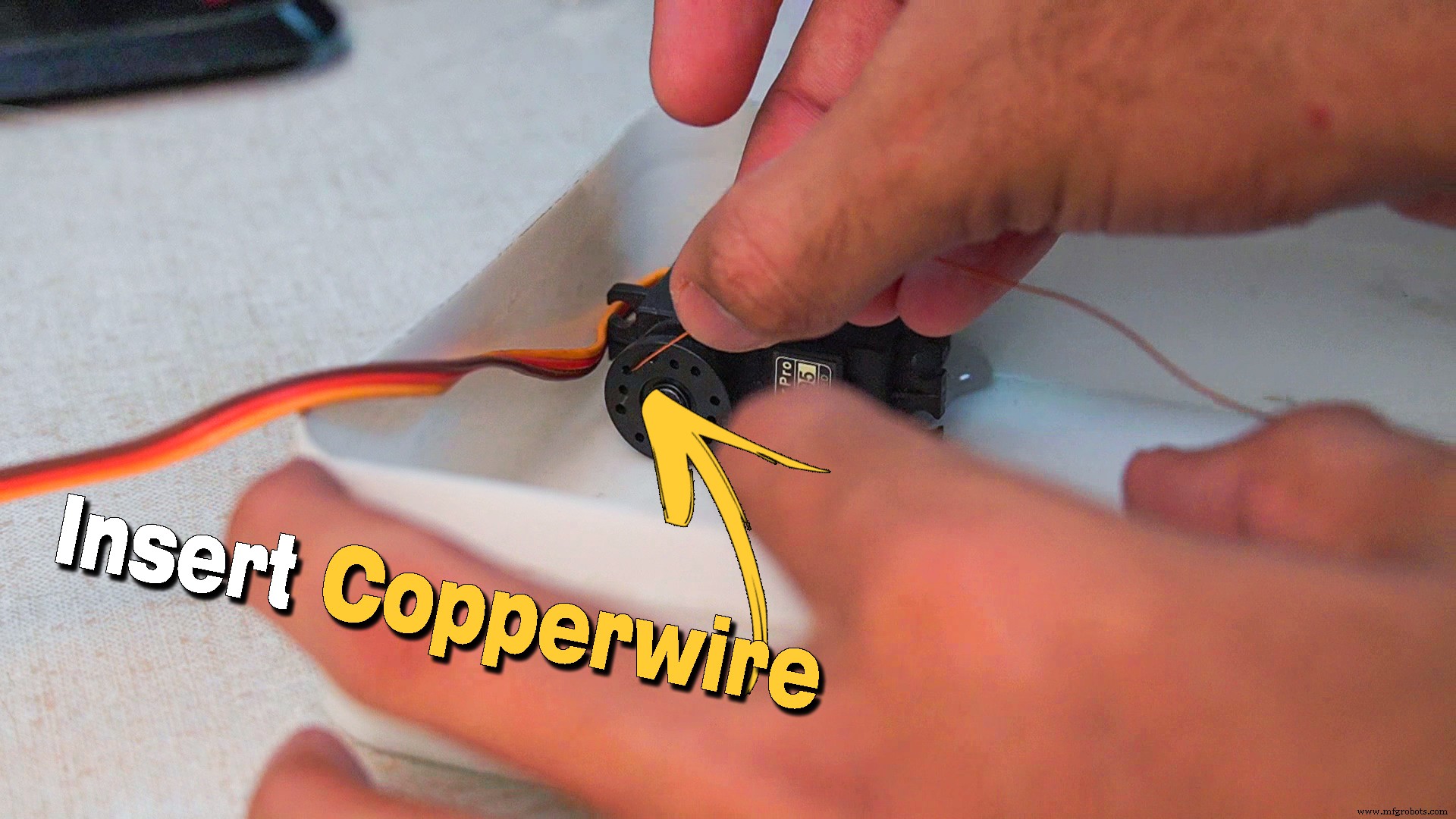
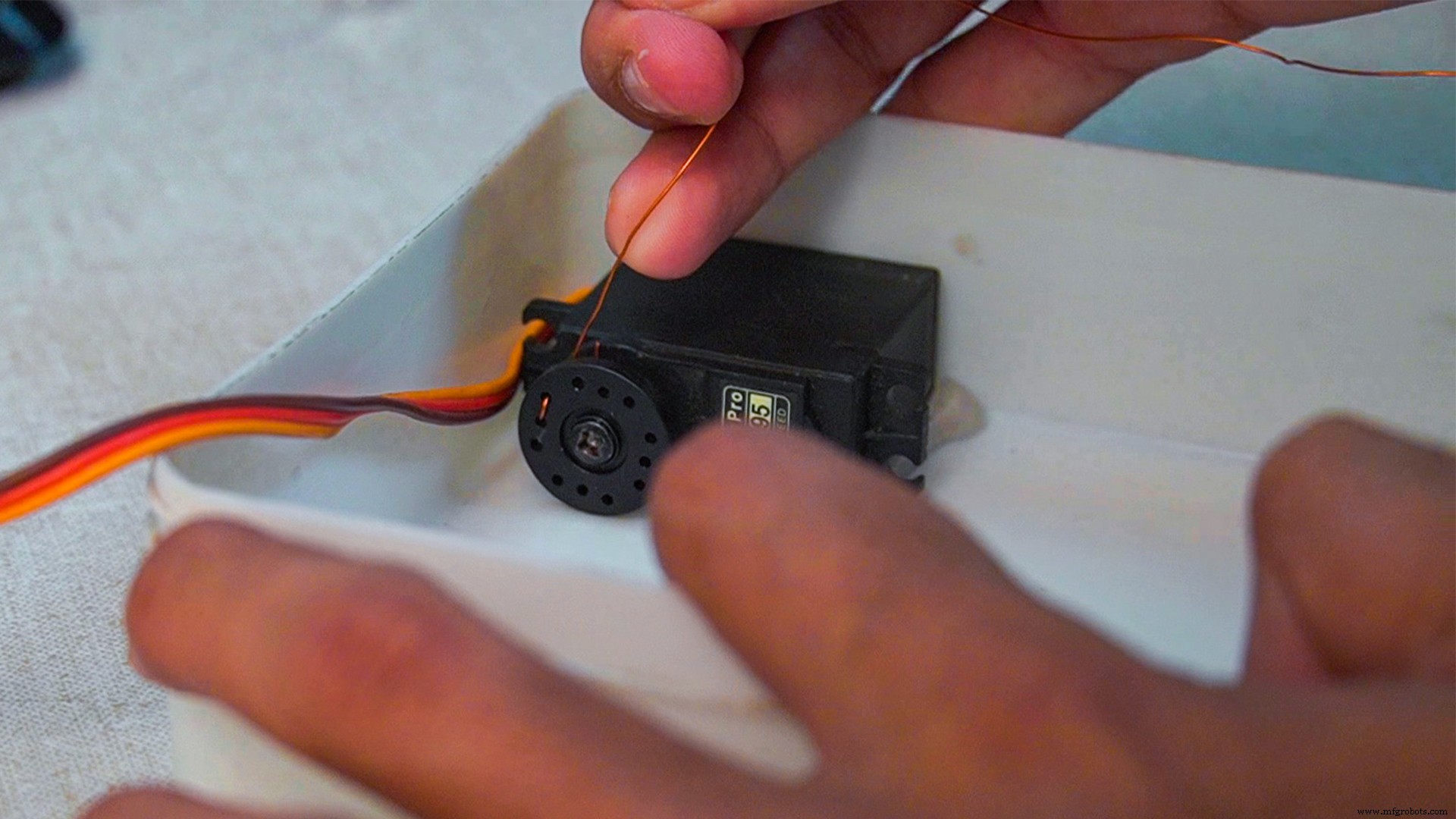
通过 铜线穿过 伺服电机使用连接臂上的孔,至少穿过 2 个孔以确保使用圆形连接臂获得适当的张力是更好的选择,因为直的可能会被卡在外壳内。
第八步:在中间加一根带孔的热胶棒



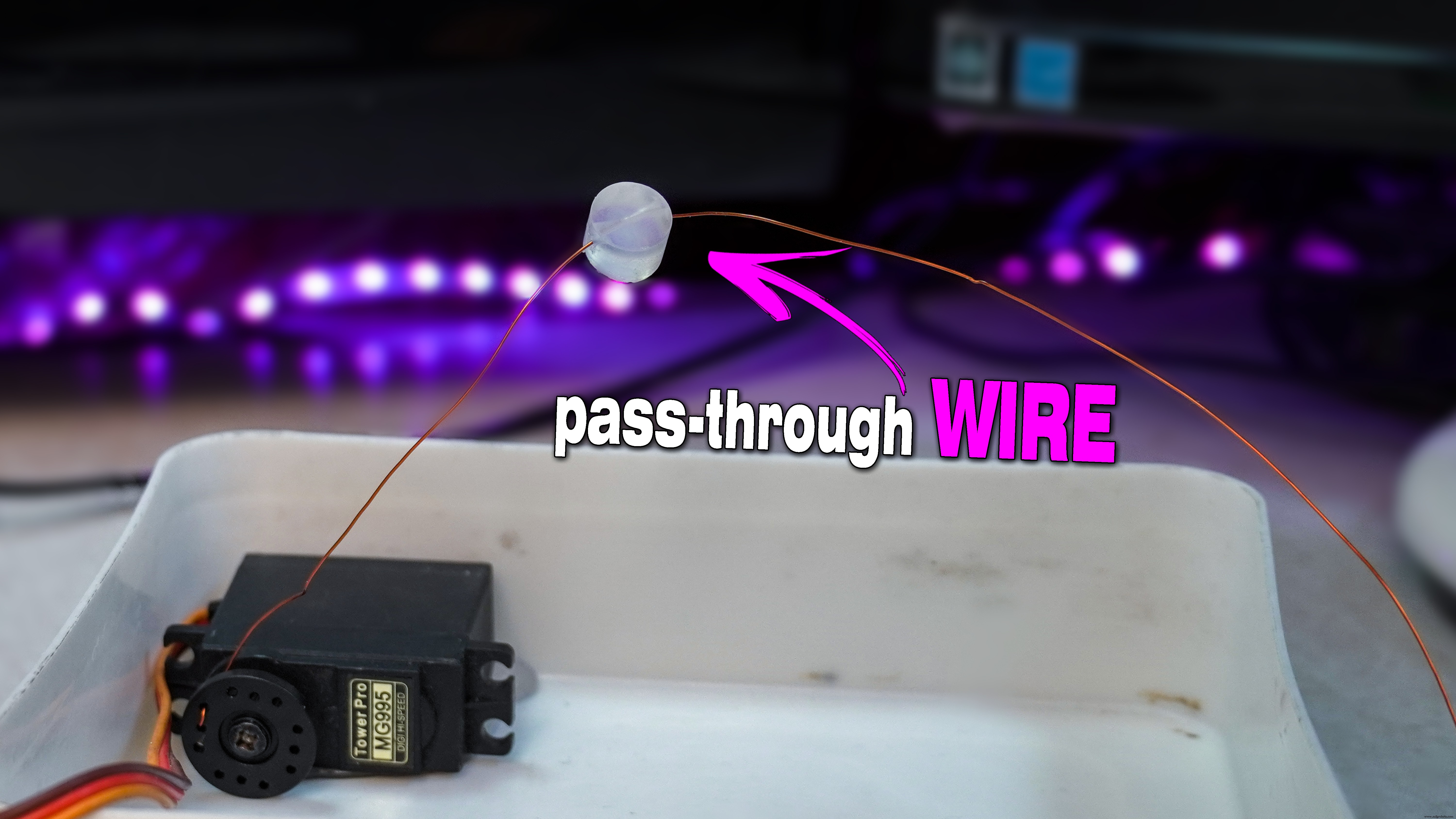
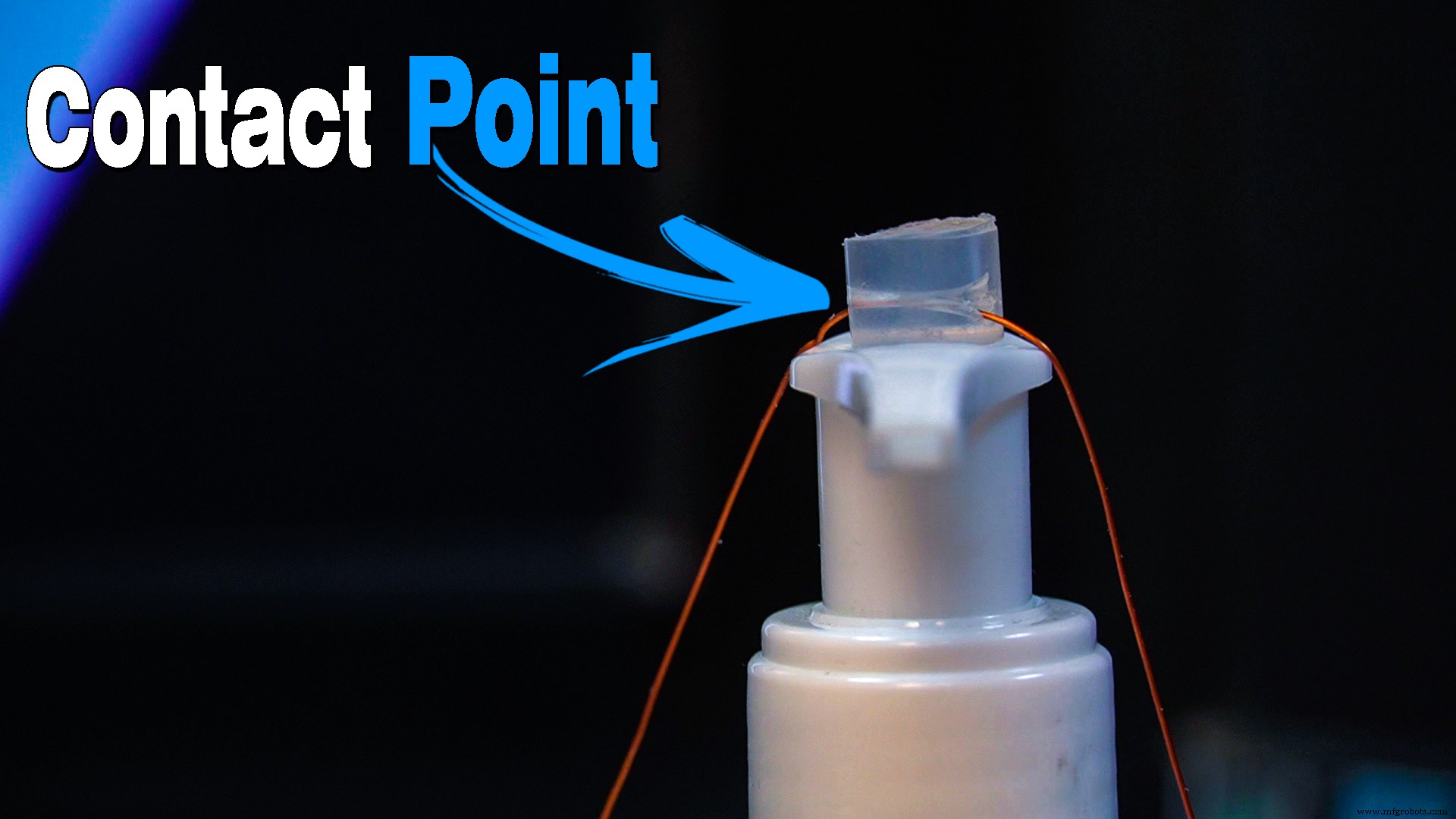
剪切 大约 2 厘米 长条热胶棒 然后挖个洞 在中间,将铜线穿过热胶棒,这确实有助于增加接触点的表面积,
第 9 步:端螺钉
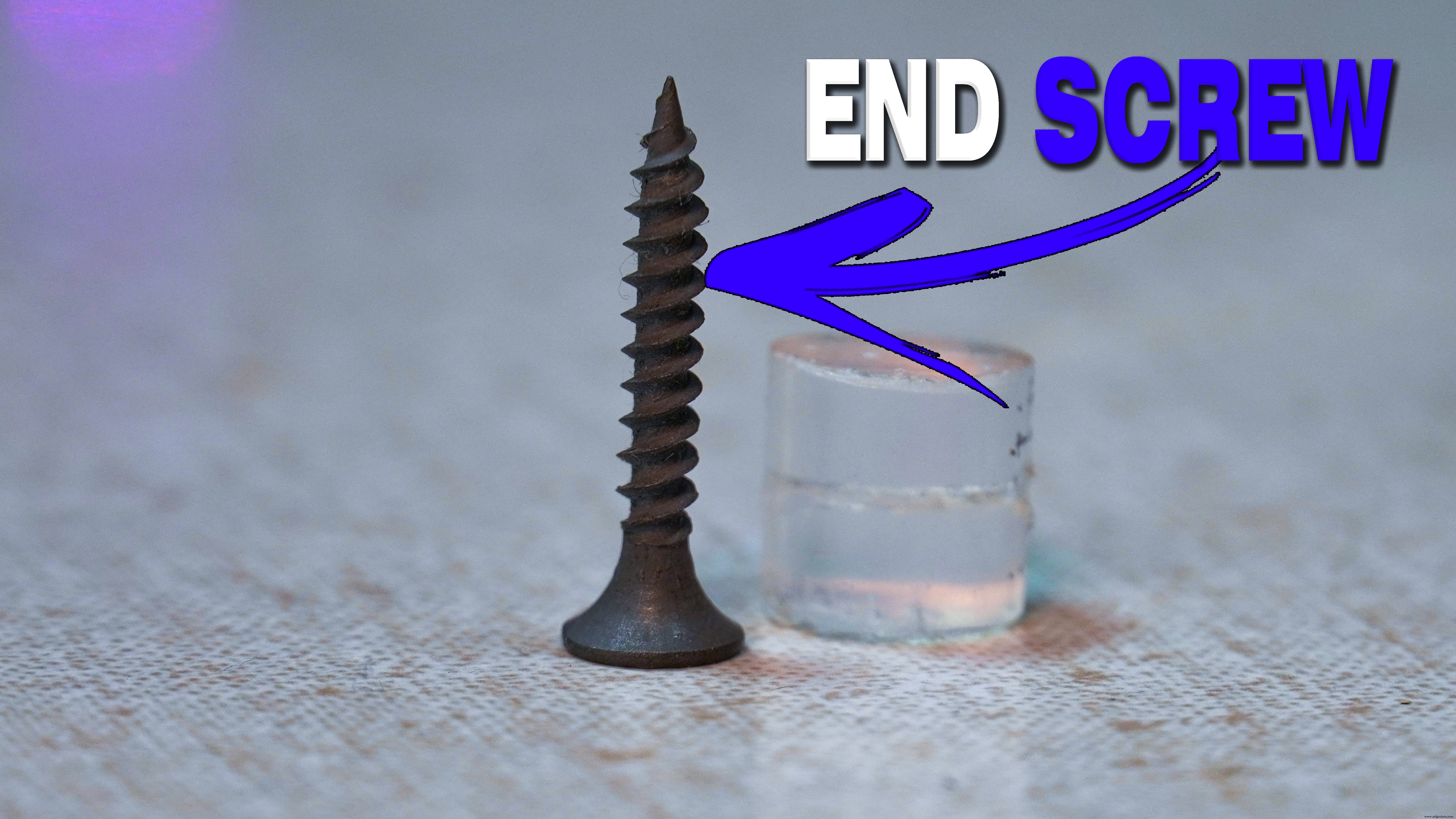
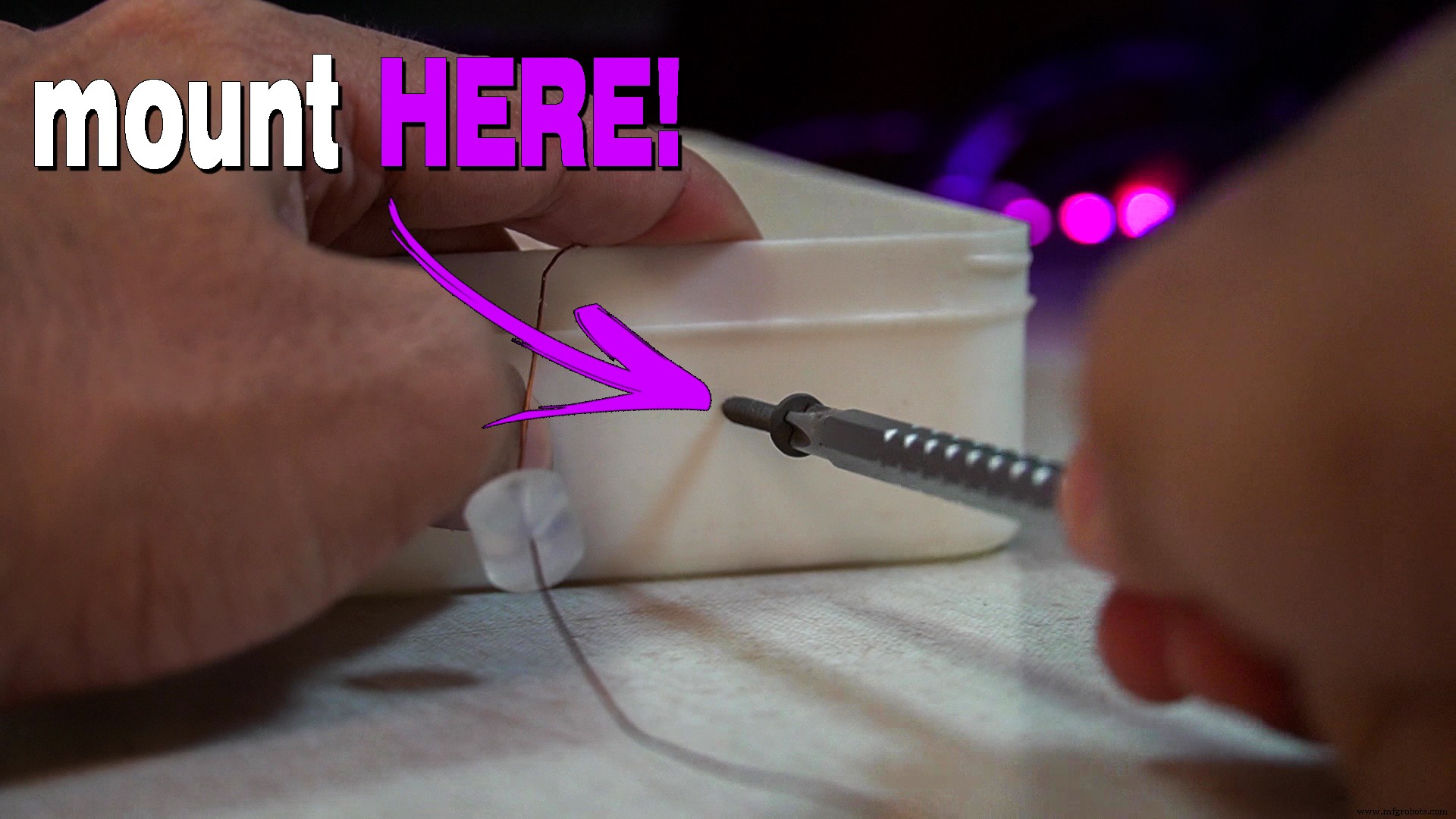

附上 第二个电线末端 到另一个刚性表面(伺服电机的对面),使用 一个自攻螺丝 或者在这里用钉子将是一个虎钳选择,因为它可以让我们调整张力或取下瓶子重新装满。
第 10 步:上传代码
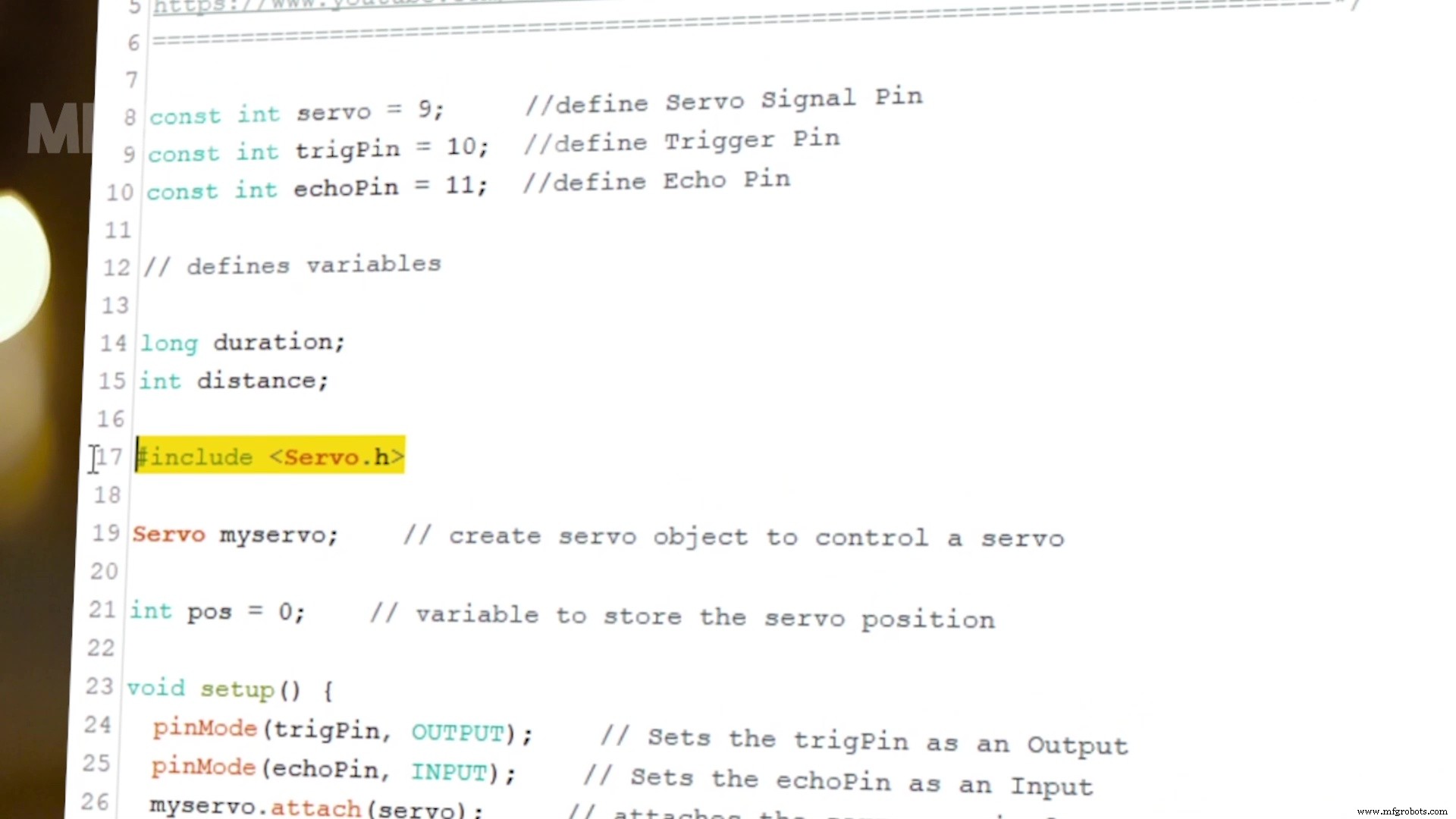
理论上我们的想法听起来很完美,让我们编写这个 Arduino 代码并在现实世界中测试我们的想法。
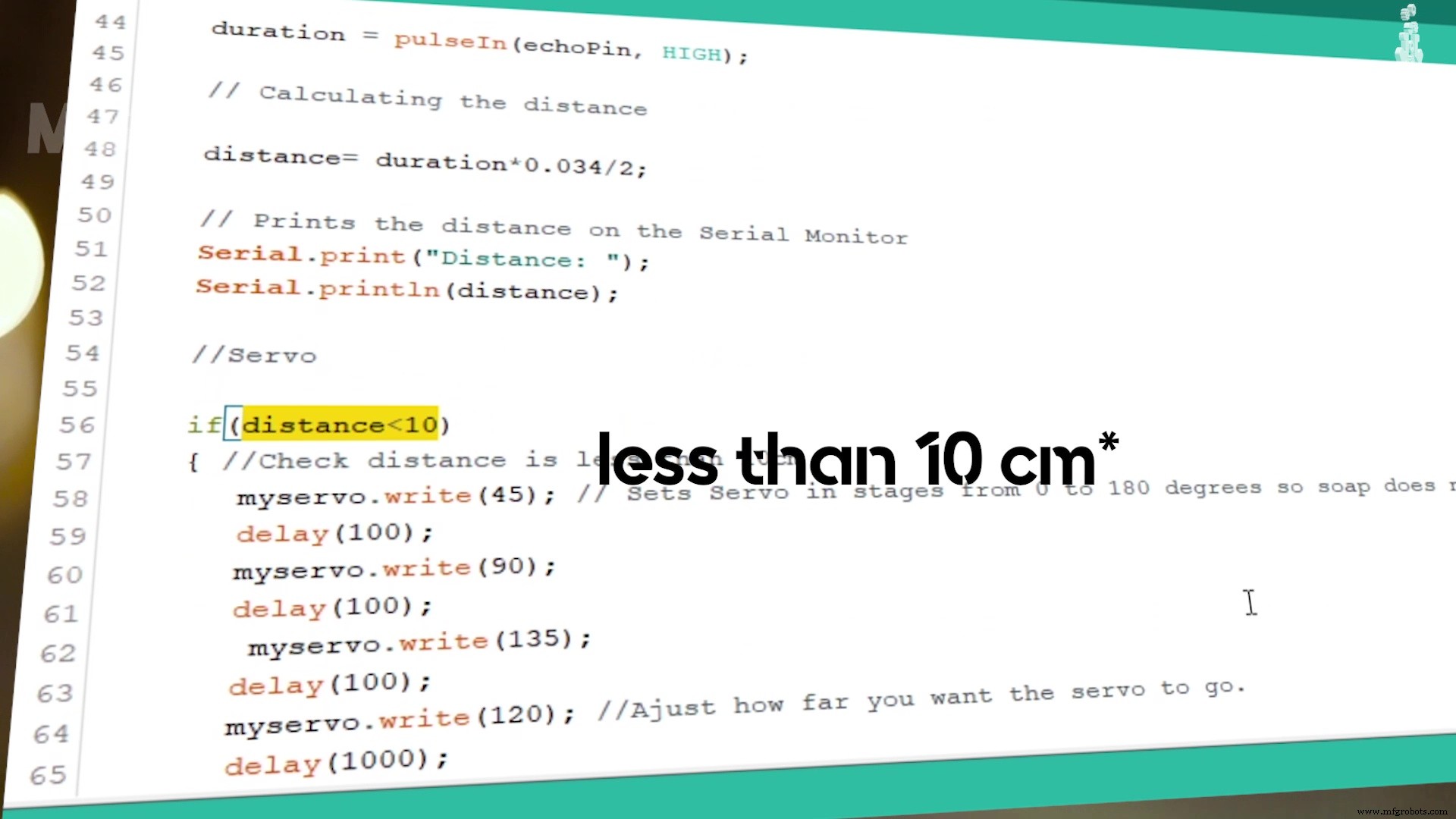
代码非常简单易懂,我们使用了servo library ,以及定义的基本设置 和变量,主要代码是计算 距离 厘米 和如果 距离小于10厘米 伺服 电机执行扫描 释放液体的动作。
您可以在此处找到伺服库。
代码更新很少,请在此处找到代码 https://minov.in/diy-hand-sanitizer-dispenser-using-arduino/ 此步骤中附有代码(有时从上面复制代码不起作用,因此请下载 来自 https://minov.in/diy-hand-sanitizer-dispenser-using-arduino/)
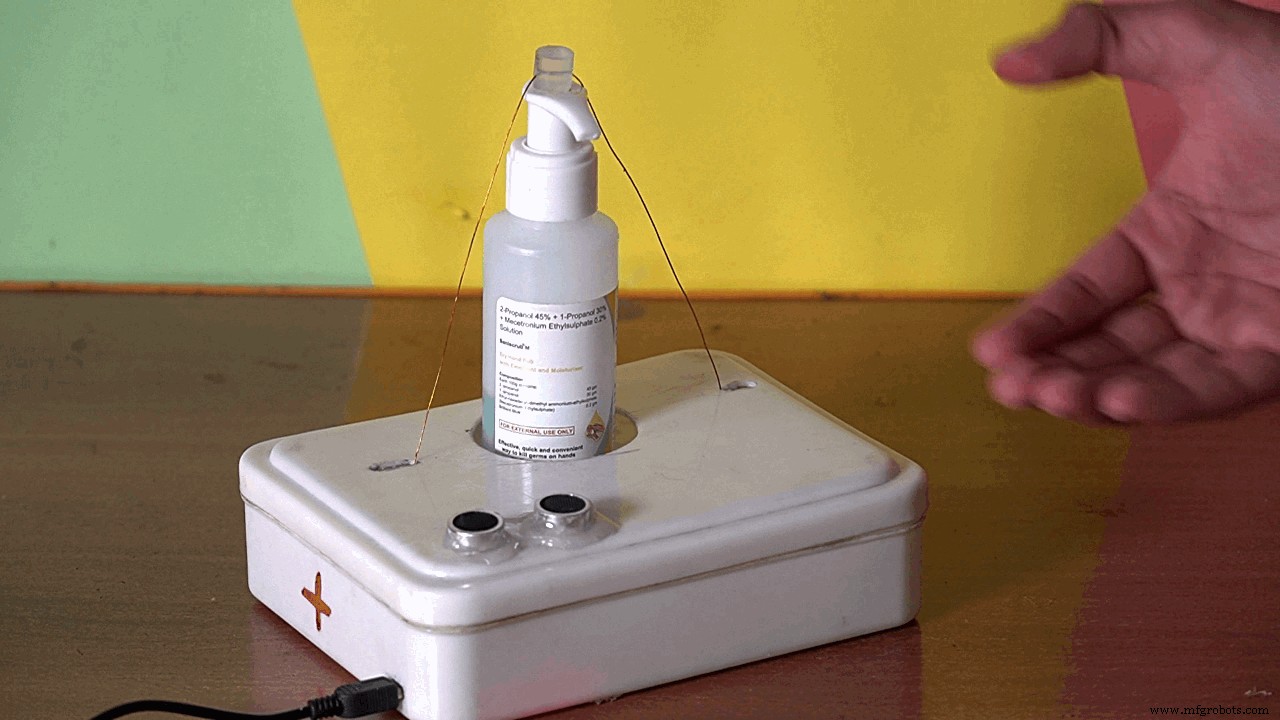
第 11 步:测试

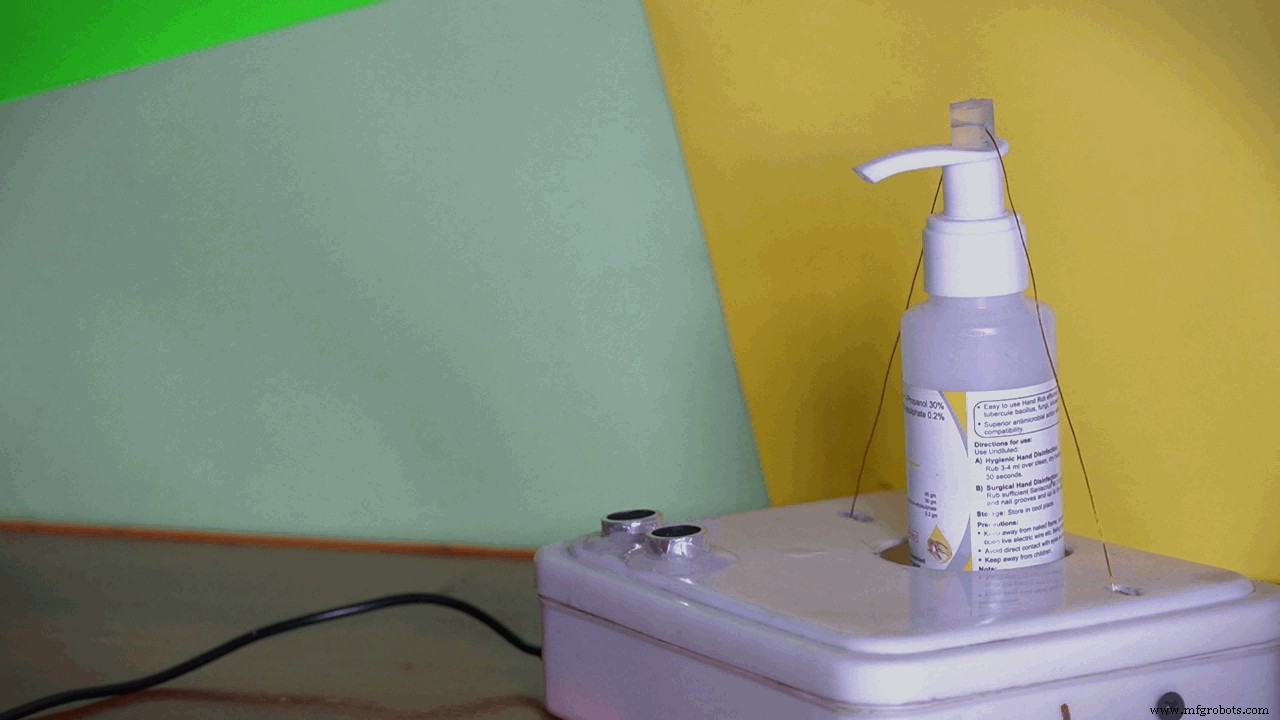
上传我们的代码后,最好测试 在我们完成这个外壳之前这个项目。
在这个测试 我们可以清楚地看到当我们的手 位于传感器上方 超声波距离低于 10 厘米,伺服 电机已接合 和酒精搓手液。
一旦项目正常运行,我们就可以进一步进行下一步!
第 12 步:完成附件


一旦我们的项目似乎开始工作,就该完成围栏了。
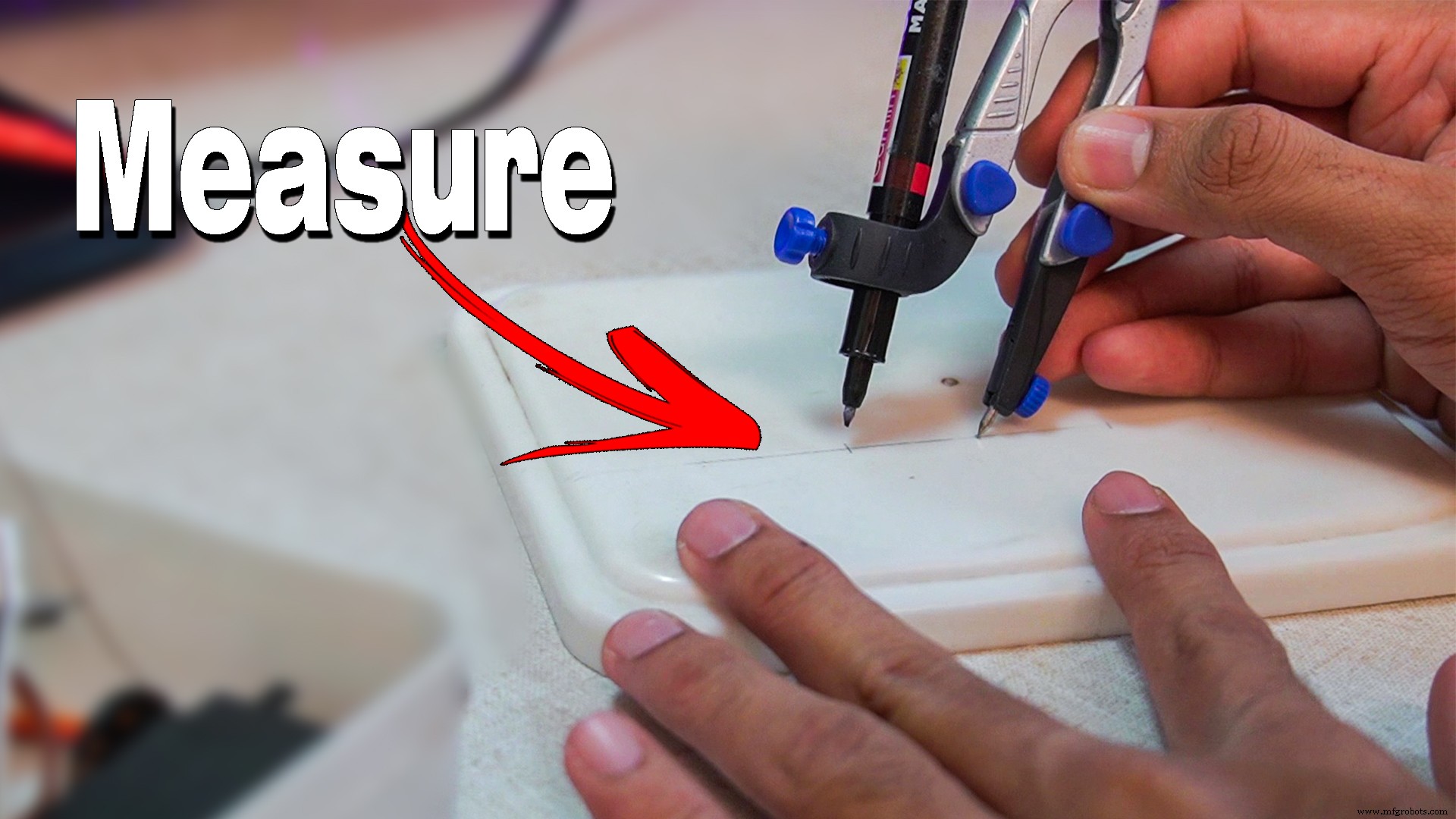
按照步骤完成它:
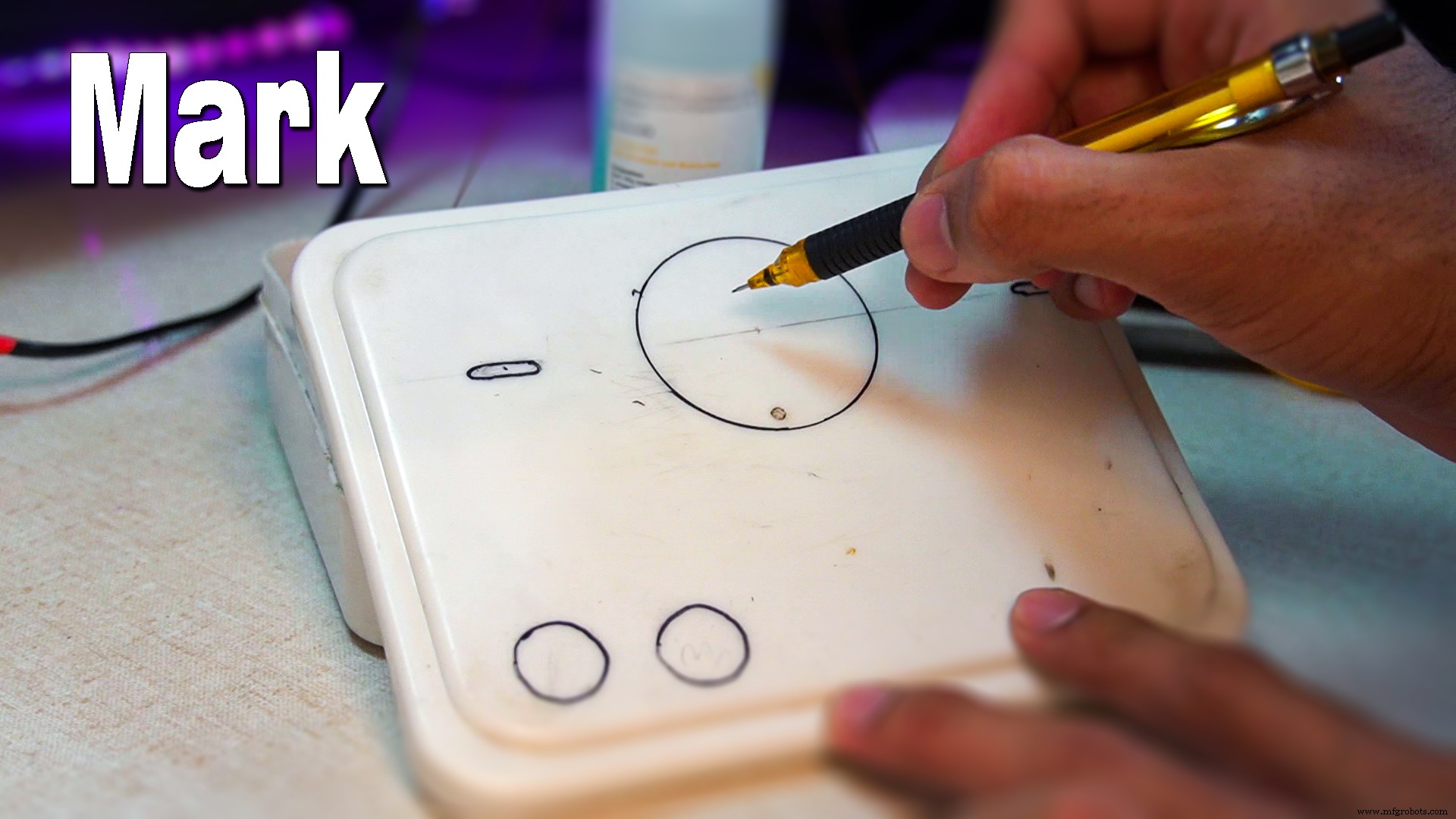
- 测量超声波传感器的尺寸和瓶子的孔。
- 为铜线制作一个插槽,为 Moment 留出额外的空间。
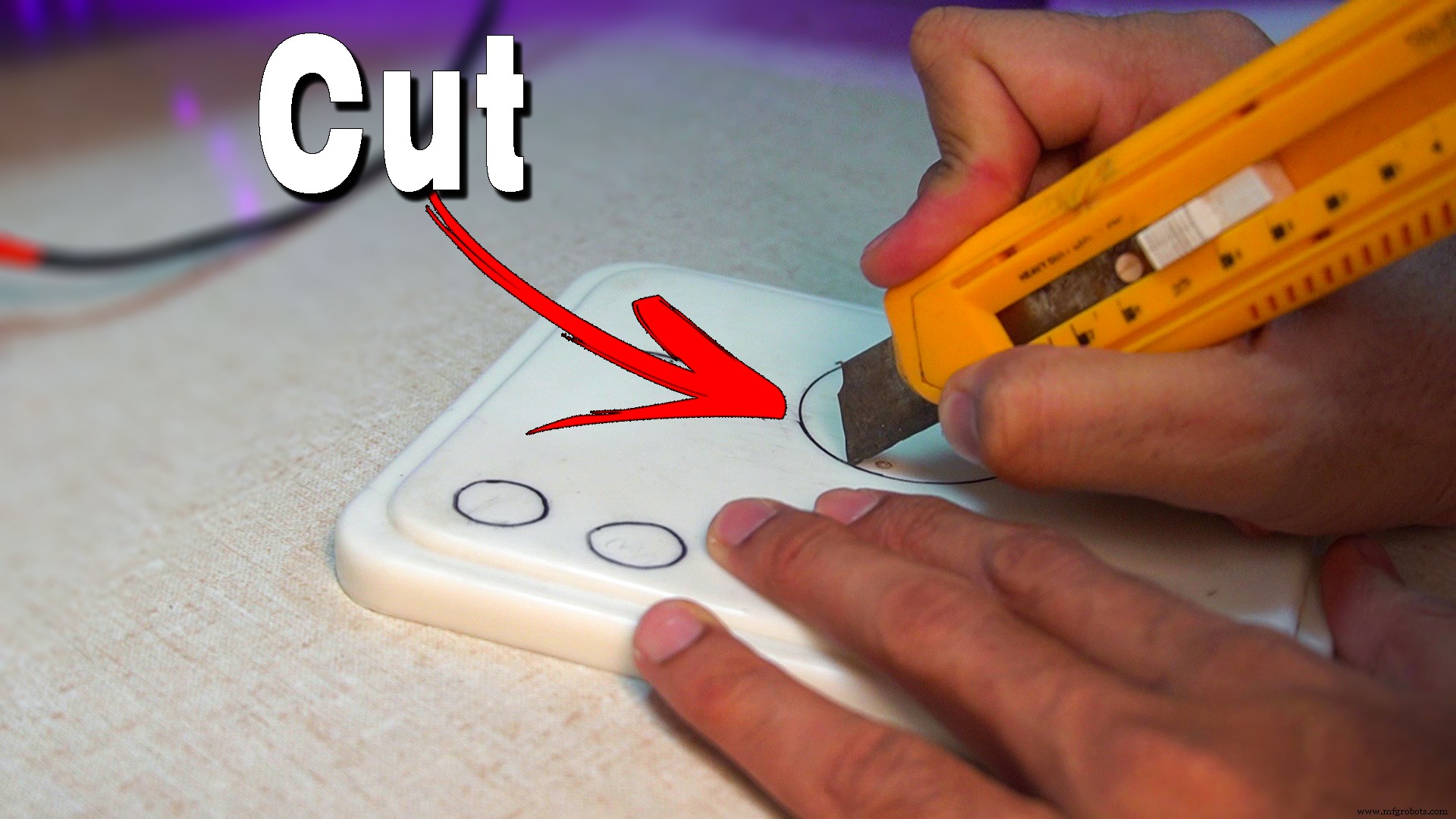
- 标记所有切割孔。
- 使用锋利的刀片或钻头绘制孔。
- 在热胶的帮助下修复一切。
终于,这个项目诞生了。
第 13 步:一切就绪!
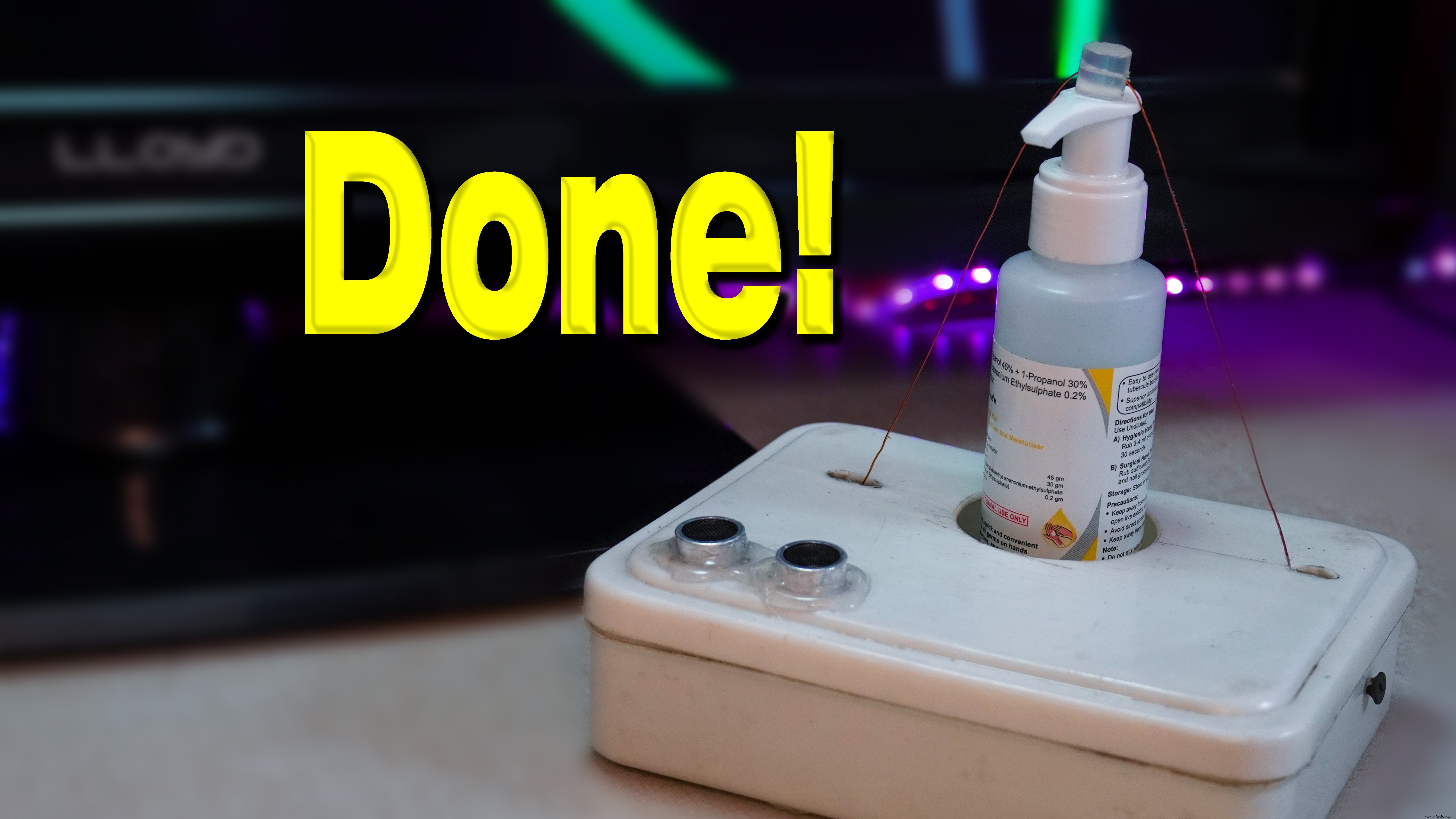
这个项目终于完成了!
第 14 步:请捐赠!

这个项目中使用的大部分部件对很多人来说都很方便,所以我会请求你们所有人制作这个项目并捐赠 医院 或任何有需要的人,我个人将这个项目捐赠给了一个必不可少的劳动力。请与您所有的工程师朋友分享此视频,让我们开始吧,制作这个项目,在 Instagram 上使用 id @officialmissioncritical 标记我们是时候为社区做出贡献并展示我们的 Arduino 社区对抗这一全球问题的力量了!
(我们不需要钱,我们只需要你们捐赠任何有助于抗争的创新项目!)
代码
Github
https://github.com/arduino-libraries/Servohttps://github.com/arduino-libraries/Servo示意图
connection_5YWkDyQBo4.fzz制造工艺
- 使用 Arduino Nano RP 2040 的 DIY Photoshop 编辑控制台
- DIY 最简单的 IV9 Numitron 时钟与 Arduino
- 862D+的DIY烙铁控制
- 使用 Arduino 和智能手机的 DIY 电压表
- 使用 Arduino DIY 红外线心跳传感器
- MotionSense
- Sonar 使用 arduino 并在处理 IDE 上显示
- MobBob:由 Android 智能手机控制的 DIY Arduino 机器人
- 带旋转编码器的DIY简易测量轮
- 使用 Bolt 和 Arduino 控制 LED 亮度
- 带有 Arduino、Yaler 和 IFTTT 的物联网仪表
- Arduino 排斥电磁悬浮