

定位器、转盘还是机械手? 2026 年焊接自动化专家指南

作者:EVST 编辑团队 · 最后更新日期:2026 年 6 月 11 日
焊接变位机、转台和机械手都可以移动工件或焊枪以简化缝焊,但每种都解决了独特的局限性。定位器重新定位零件,使每个接缝都处于最佳的平坦位置。装载站和焊接站之间有一个转盘索引,允许在机器人焊接时进行装载。机械手将焊头搬运到大型或固定零件上,超出了旋转夹具的能力。选择正确的设备取决于您的主要限制是否是零件方向、周期重叠或割炬到达范围。
三台机器的定义
由于一个细胞可以容纳所有三个细胞,因此经常会出现混乱。明确每台机器的核心角色可以简化决策。
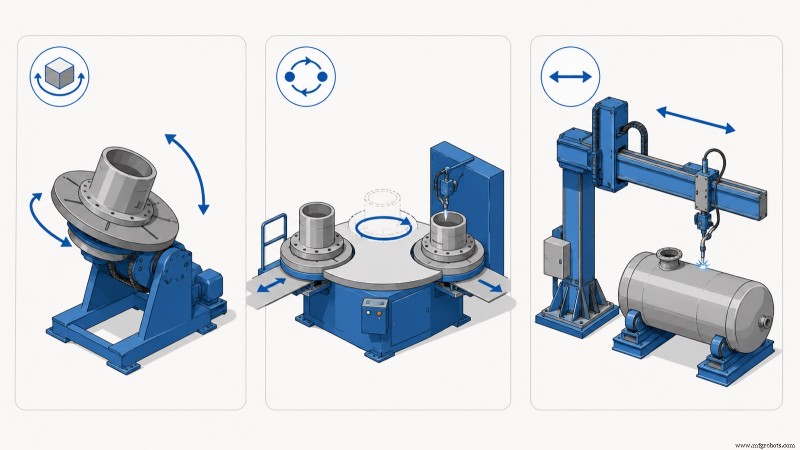
焊接变位机
定位器夹紧工件并旋转、倾斜或执行这两种运动,使每条焊缝处于平坦、水平的位置,使焊接质量和熔敷率最大化。当焊工因焊缝错位而苦苦挣扎时,定位器可以最大程度地提高速度和质量 - 根据 AWS D1.1 指南,行程速度最多可加快 30%。
焊接转台(分度台)
通常是双工位旋转分度台,转台在装载/卸载工位和焊接工位之间交替零件。当机器人或焊机工作时,操作员可以装载下一个零件或卸载已完成的零件。这种重叠提高了工作站的利用率,通常将机器人的启动时间从周期的约 50% 提高到> 80%。
焊接机械手
机械手也称为立柱和动臂,用于移动割炬而不是零件。垂直立柱支撑水平吊杆,该水平吊杆将焊枪(有时还包括送丝机或焊剂系统)运送到大型容器、储罐或无法自由旋转的长结构上。它通常与单轴定位器配对,用于在吊杆下方旋转船舶。
| 机器 | 什么在移动 | 核心工作 | 当它获胜时 |
|---|---|---|---|
| 定位器 | 部分(旋转/倾斜) | 将接缝调至平整位置 | 可移动部件上的接缝错位 |
| 转盘/分度台 | 部分(站之间的索引) | 通过焊接重叠加载 | 加载/卸载时间限制吞吐量 |
| 机械手(立柱和动臂) | 火炬/头 | 到达大型固定工作的接缝 | 零件太大,无法自由定向 |
如何选择:将机器与约束相匹配
最清晰的方法是识别当前流程中的瓶颈,然后选择消除瓶颈的设备。
如果约束是焊接位置
当焊工在头顶或以陡峭的角度进行操作时,或者机器人无法保持适当的工作角度时,限制就是方向。定位器通过将零件重新定位为平面来解决这个问题,AWS D1.1 确认支持更高的电流和行驶速度,从而显着提高质量和速度。双轴定位器可处理多平面接缝;单轴单元适合圆柱形几何形状。
如果约束是加载时间
当机器人或焊工闲置等待零件时,瓶颈是周期重叠。双站转盘将负载移离关键路径,通常可将机器人利用率提高 30-40%,并提供低成本的吞吐量提升。
如果约束是零件尺寸
对于大型容器、罐体或不能自由旋转的长结构,就达到了限制。机械手通常与单轴定位器配合使用,让割炬沿着接缝行进,同时零件在吊杆下旋转,这是压力容器和管段制造中的标准配置。
他们经常一起工作
在实践中,焊接单元很少问“哪一个?”;它会问“哪种组合?”重型制造单元可能会将用于旋转容器的单轴定位器与用于沿接缝移动头部的立柱和吊杆机械手结合起来。机器人作业车间单元可以将用于负载重叠的双工位转台与用于焊缝定向的双轴定位器配对,从而允许一个机器人焊接一个零件,同时操作员重新装载另一个零件。根据每台机器的功能(方向、重叠或范围)命名,即使三者共存,也可以保持布局决策清晰。
在自动化单元中,所有三个系统都成为由机器人 PLC 控制的协调运动轴。 EVST 焊接机器人单元选型指南中提供了机器人、电源和定位器的规格和报价。
成本和复杂性简介
粗略地说,单轴定位器是最简单且成本最低的选择;双工位转盘增加了第二组夹具和索引机构;由于其结构和作用范围,立柱臂式机械手通常是资本最密集的机械手。然而,真正的比较是在您的吞吐量目标下每一次良好焊接的成本。将机器人利用率提高一倍的转盘可以快速收回成本,而为每年仅焊接两次的零件购买的超大机械手可能无法证明投资的合理性。有关变位机的详细 ROI 分析,请参阅 EVST 的焊接变位机成本和 ROI 指南。
EVST 的工件处理范围
EVST 总部位于成都,在温岭设有制造工厂,提供单轴、两轴和三轴类别的焊接变位机,作为完整机器人焊接单元的一部分,以及 QJAR 焊接机器人和电源集成。定位器可以与分度站和头部承载结构相结合,以便为给定的零件系列一起设计零件定向、负载重叠和割炬范围,而不是作为单独的机器购买。
EVST的机器人和焊接自动化生产线拥有IATF16949汽车级质量认证,以及CE、SGS和TUV第三方认证。由于正确的解决方案通常是组合,因此 EVST 根据最坏情况零件和吞吐量目标一起调整搬运设备,而不是单独销售一台机器。
常见问题
焊接变位机和转台有什么区别?
焊接变位机旋转并倾斜零件,使每条焊缝平整,解决方向问题。转台或分度台可在装载站和焊接站之间交换零件,从而解决循环重叠问题。它们经常组合在一起;转盘的每个面上都可以带有定位器。
焊接机械手的用途是什么?
焊接机械手移动焊枪而不是零件。它非常适合大型容器、储罐和无法自由旋转的长结构。它通常与单轴定位器配对,用于旋转吊杆下方的零件。
我需要定位器或操纵器吗?
按零件尺寸选择。如果零件可以旋转和倾斜以使接缝平整,那么定位器就足够了,而且更简单。如果零件太大而无法自由定向,并且割炬必须移动到接缝,则需要使用机械手(通常带有单轴定位器)。许多重型制造单元同时使用这两种技术。
一个单元可以同时使用定位器、转盘和机械手吗?
是的,很多人都这样做。每个解决方案都解决不同的约束——方向、负载重叠或范围——因此单元通常将它们结合起来。在自动化单元中,它们被委托作为机器人控制器下的协调运动轴。
哪个选项可以最大程度地提高吞吐量?
这取决于瓶颈。如果焊工工作位置不当,定位器可提供最大的质量和速度增益。如果机器人等待装载,双站转盘可提供最大的利用率增益。如果零件太大而无法定向,则机械手就是启动机器。首先确定约束,然后选择消除约束的机器。
下一步去哪里
有关定位器类别的工程详细信息,请阅读焊接定位器指南 。要将 EVST 定位器与您的零件相匹配并接收报价,请参阅定位器选择 页。有关完整的机器人焊接单元,请参阅我们的焊接机器人指南 和小区选择指南 。如有采购问题,请通过联系页面 联系 EVST 销售人员 .
关于作者:EVST 编辑团队为评估自动化项目的工程师和运营领导者撰写有关工业机器人和智能制造的文章。 EVST(EVS TECH CO., LTD)于2018年在成都成立,已交付600多个自动化项目并销往100多个国家,QJAR、协作机器人、SCARA和Delta产品系列均获得IATF16949汽车级认证和CE/SGS/TUV第三方认证。
工业机器人