工业4.0先进制造技术信息网站!

研究人员开发了一种机器人,该机器人使用可以穿过墙壁的无线电波来感知被遮挡的物体。这款名为 RF-Grasp 的机器人将这种强大的传感功能与更传统的计算机视觉相结合,以定位和抓取可能被遮挡的物品。这一进步有朝一日可以简化仓库操作或帮助机器从杂乱无章的工具箱中取出螺丝刀。 尽管有时工作条件很危险,但仓库工作通常仍然是人类的领域,而不是机器人的领域。部分原因是机器人难以在如此拥挤的环境中定位和抓取物体。仅使用光学视觉,机器人无法感知包装在盒子中或隐藏在货架上另一个物体后面的物品的存在,因为可见光波不会穿过墙壁 - 但无线电波可以。 射频 (RF) 识别系统有两个主要组件:阅读器和标签。标签是一种

Sensors Expo 将于 6 月 27 日至 29 日返回加利福尼亚州圣何塞的 McEnery 会议中心,其新名称为 Sensors Converge。有九个会议轨道突出了传感器的不同应用,但如果你仔细观察,它们有一个共同的主题。一切都是关于智能连接——融合。它是关于收集数据、将数据转换为可用信息并共享该信息以控制流程并使人们能够做出明智的决策。传感器是所有数据的来源。 主题演讲涉及对传感器市场越来越重要的两个领域——可持续性和机器人技术。 可持续性——开幕主题演讲 将可持续发展融入日常生活的主要倡导者 Adrian Grenier 将致开幕词“技术与可持续发展:携手共创美好未来”。
机器人擅长做相同的重复动作,例如装配线上的简单任务。但是当它们在环境中移动时,它们缺乏感知物体的能力。伊利诺伊大学厄巴纳-香槟分校、NVIDIA、华盛顿大学和斯坦福大学的研究人员最近进行了一项关于 6D 物体姿态估计的研究,以开发一种滤波器,为机器人提供更大的空间感知,以便它们可以操纵物体和导航更准确地穿越空间。 虽然 3D 姿势提供了 X、Y 和 Z 轴上的位置信息——物体相对于相机的相对位置——但 6D 姿势提供了更完整的图片。就像描述飞行中的飞机一样,机器人需要知道物体方向的三个维度:偏航、俯仰和滚动。在现实生活环境中,所有这六个维度都在不断变化。 该过滤器旨在帮助机器人分析空间数
用于人类探索的太空和行星表面组装是一个具有挑战性的领域,其中包括支持人类任务的各种技术推动力。 NASA 正在开发自主组装代理,以在月球上建造栖息地和触角等结构。这些模块化和可重新配置的 Assembler 机器人将提供结构的机器人组装,即使是在禁止持续人工监督和远程操作的位置。 装配工是一组模块化的机器人,他们一起工作来建造东西。每个 Assembler 是一个或多个 Stewart 平台或六足机器人的堆叠,由两个板组成,两个板通过六个线性致动器连接以进行运动,从而实现顶板相对于底板的完整六自由度姿势。每个装配器上的末端执行器可实现抓取、提升和焊接/连接。 Assemblers 系统架构
在 4 级自动驾驶汽车中 ,车辆的自动驾驶系统执行所有驾驶任务并监控环境。虽然驾驶员可以选择控制车辆,但人类操作员理论上在这些情况下不需要注意。 但是,您认为 4 级自动驾驶汽车的车主会因为车辆完成大部分工作而感到安全吗? 你会觉得安全吗? 在题为“自动化车辆测试和仿真标准化”的网络研讨会中,一位读者向两位汽车行业专家提出了以下问题: “自动驾驶汽车 (AV) 的最低安全级别是多少?安全到何种程度才足够安全?级别 4 是一个值得称赞的目标,但迄今为止,还没有人提出安全的全自动火车系统。纽约地铁、华盛顿地铁和 Amtrak 列车都在非常受控的环境中运行。然而,迄今为止,它们还不能完全自
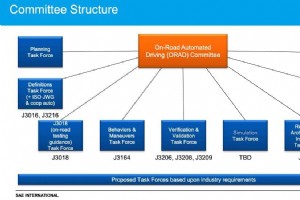
在自动驾驶汽车上路之前,需要对尽可能多的场景进行测试。 模拟软件和基于模型的开发工具可以创建虚拟的“试驾”环境。 HIL 或“硬件在环”测试将控制器的真实信号连接到模拟现实的测试系统。例如,像发动机 ECU 这样的控制器实际上可以被欺骗“认为”它在成品车中。借助 HIL,制造商可以将车辆组件置于一系列可能的场景中,而无需实际驾驶成本。 然后,当然,还有驾驶汽车进行真正的旋转 - 无论是在开放的道路上还是在封闭的路线上。 在现场技术简介中 题为“自动化车辆测试和仿真的标准化”的演讲,一位读者向两位行业专家提出了以下问题。 对于 AV 测试,模拟、封闭路线和公共道路测试各自的作用是什么?
普渡大学的创新者们正在从蜘蛛身上获取线索,以开发更好的 3D 光电探测器用于生物医学成像。 受蜘蛛网重复架构模式的启发,该团队展示了一种弹性的圆顶形光电探测器阵列,可以同时检测入射光的方向和强度,就像昆虫和甲壳类动物等节肢动物的复眼视觉系统一样. “我们采用蜘蛛网的独特分形设计来开发可变形且可靠的电子设备,可以与任何 3D 曲线表面无缝连接,”普渡大学生物医学工程和机械工程助理教授 Chi Hwan Lee 说。 这种 3D 光电架构对于需要更大视场、更宽视角和更高运动灵敏度的光电探测系统尤其有价值。 该工作发表在在线期刊 Advanced Materials . 为什么是蜘蛛网?
为了从科学论文中自动捕获重要数据,美国国家标准与技术研究院 (NIST) 的计算机科学家开发了一种方法来准确检测图像数据中包含的密集、低质量图中的三角形等小型几何对象。 NIST 模型采用旨在检测模式的神经网络方法,在现代生活中有许多可能的应用。 NIST 的神经网络模型在一组定义的测试图像中捕获了 97% 的对象,将对象的中心定位在手动选择位置的几个像素内。研究人员在 NIST 热力学研究中心 (TRC) 的金属特性数据库中从早在 1900 年代初期的期刊文章中获取数据。结果通常仅以图形格式呈现,有时是手工绘制的,并通过扫描或影印而降级。研究人员希望提取数据点的位置以恢复原始的原始数据以进
Spinoff 是 NASA 的年度出版物,主要介绍成功商业化的 NASA 技术。这种商业化促进了健康和医药、消费品、交通、公共安全、计算机技术和环境资源领域的产品和服务的发展。 国际空间站 (ISS) 的内部旨在让宇航员在失重的轨道上产生垂直的错觉。 “地板”相对整洁,照明沿着对面的“天花板”延伸,大部分显示器、电缆和常用设备都装在“墙壁”上。宇航员学会用他们的眼睛而不是他们的内耳来确定他们的方向。这是一种很容易打破的错觉,通常会导致混乱、恶心和眩晕,但随着时间的推移,这种情况会逐渐减少。 返回地球会导致类似的调整期。航天飞机的机组人员通常会在 12 小时到两三天内完全恢复,但在国
研究人员创造了 AuraRing,这是一种戒指和腕带的组合,可以检测某人食指的精确位置并持续跟踪手部动作。戒指发出的信号可以在腕带上接收到,然后可以识别戒指的位置和方向以及它所连接的手指。它捕捉手指执行的细粒度操作——不仅仅是一个手势或手指指向的位置,而是可以完全跟踪手指的东西。 AuraRing 由绕着 3D 打印环缠绕 800 次的线圈组成。流过电线的电流会产生磁场,腕带上的三个传感器会接收到该磁场。根据传感器检测到的值,研究人员可以持续识别环在空间中的确切位置。从那里,他们可以确定用户手指的位置。 为了在其他智能环中进行连续跟踪,所有数据都必须使用无线通信进行流式传输,这会消耗大量电
E-Tongue 是一项正在申请专利的技术,由硅基叉指电极 (IDE) 阵列和纳米结构材料组成,可以检测液体样品中的生物分子和化学化合物。 化学物质和生物物种——例如氨基酸、DNA、矿物质、盐和水中溶解的有机挥发物——可能存在于液体中,但其中一些在气体中可能无法检测到。因此,测试某些体液中是否存在一种或多种目标成分(例如肌钙蛋白或葡萄糖)可能是有用的,当利用市场上可用的现有技术时,这些成分在气体或液体中也可能无法有效检测到。 E-Tongue 技术由多种纳米结构材料组成,当生物分子与它们结合时,这些材料会发生电气特性(例如电阻或电流)的变化。测量的电信号通过信号处理算法进行处理,以提供可解
更好的传感能力将使无人机能够在危险环境中导航,并使汽车能够防止人为失误造成的事故。当前最先进的传感器技术处理数据的速度不够快,但大自然可以。 研究人员在蜘蛛、蝙蝠、鸟类和其他动物的启发下构建了传感器,这些动物的实际感觉是与称为机械感受器的特殊神经元相连的神经末梢。神经末梢——机械传感器——只检测和处理对动物生存至关重要的信息。它们以头发、纤毛或羽毛的形式出现。许多生物机械传感器根据压力或温度变化等阈值过滤数据——它们从环境中接收到的信息。 例如,蜘蛛的毛茸茸的机械传感器位于它的腿上。当蜘蛛网以与猎物或配偶相关的频率振动时,机械传感器会检测到它,从而在蜘蛛体内产生反射,然后迅速做出反应。机械
一种新的雷达系统很容易集成到当今的车辆中,它使用多普勒雷达从建筑物和停放的汽车等表面反射无线电波。雷达信号以一定角度撞击表面,因此它的反射会像母球撞击台球桌的墙壁一样反弹。信号继续打击隐藏在拐角处的物体。一些雷达信号会反射回安装在汽车上的检测器,从而使系统能够看到拐角处的物体并判断它们是在移动还是静止。 该系统将使汽车能够看到当今激光雷达和摄像头传感器无法记录的被遮挡物体;例如,允许自动驾驶车辆看到危险的十字路口。雷达传感器的成本也相对较低,尤其是与激光雷达传感器相比,并且可以大规模生产。该系统能够区分包括汽车、自行车和行人在内的物体,并测量它们的方向和迎面而来的速度。 近年来,工程师们开
器官芯片概念创建了模仿特定器官功能的小规模生物结构,例如以与肺相同的方式将氧气从空气中转移到血液中。目标是使用这些器官芯片(也称为微生理模型)来加快高通量测试,以评估毒性或评估新药的有效性。 但是,尽管近年来芯片上的器官研究取得了重大进展,但使用这些结构的一个障碍是缺乏旨在实际从系统中检索数据的工具。收集数据的现有方法是进行生物测定、组织学或使用其他涉及破坏组织的技术。我们需要的是能够提供一种在不影响系统运行的情况下实时收集数据的工具。 全身的氧气水平差异很大;例如,在一个健康的成年人中,肺组织的氧气浓度约为 15%,而肠道内层的氧气浓度约为 0%。这很重要,因为氧气直接影响组织功能。要了
通常,在跨越大片领土的崎岖、恶劣、不可预测的地形中需要数据监控系统。所需的解决方案必须可靠;但是,系统的操作员很少能够访问远程站点以检索数据或执行日常维护。 远程无线传感器网络 (LRWSN) 是一种无线网状传感器网络架构,可捕获、收集和中继来自远程离网位置的不同现场数据。 LRWSN 坚固耐用、易于安装和操作、具有成本效益的扩展、无线和低功耗,使各种传感器能够放置在现场的任何位置。 LRWSN 可针对持续监测数据进行优化,例如气候和地面变量、脆弱的生态系统、关键边界周长以及远程流域和暴雨监测点。 该系统由敏捷、自我配置、自我修复的网状网络设计实现,该设计支持分布在数英里崎岖地形上的各种传
每年,缺乏疫苗接种导致约 150 万人可预防的死亡,主要发生在发展中国家。使疫苗接种变得困难的一个因素是缺乏存储医疗记录的基础设施,因此通常没有简单的方法来确定谁需要特定疫苗。 研究人员已经开发出一种方法来记录患者的疫苗接种史,方法是将数据存储在一种肉眼不可见的染料模式中,该模式与疫苗同时在皮下传递。这种由称为量子点的纳米晶体组成的新染料可以在皮肤下至少保留五年,在那里它会发出近红外光,可以被专门配备的智能手机检测到。 为了创建一个“就诊”、分散的医疗记录,研究人员开发了一种新型的铜基量子点,它在近红外光谱中发光。这些点的直径只有约 4 纳米,但它们被封装在生物相容性微粒中,形成直径约 2
积分场光谱仪 (IFS) 是一种结合光谱和成像功能的仪器。 IFS 提供二维视场上的光谱信息。在基于小透镜的 IFS 设计中,小透镜阵列放置在光谱仪入口平面中。小透镜阵列产生的所有光束都通过一个色散元件并由相机成像,从而为每个单独的小透镜生成光谱。 传统的基于小透镜的 IFS 设计使光谱错开,因此它们是分开的并且仅部分重叠。光谱的交错是一个问题,因为检测器的一列将被相邻光谱的不同波长占据,动态范围可能相当高。 美国宇航局戈达德研究人员开发了基于透镜的积分场光谱仪,通过将相邻光谱彼此相邻放置而不是交错排列,更好地利用探测器像素。对于需要高动态范围的情况,每个频谱可能占据五行以避免其相邻频谱之
NASA 的兰利研究中心开发了一种基于场效应晶体管 (FET) 的固态集成电路。该传感器称为 ergFET,可表征材料的电子特性,可用于检测行李、电线和液体等物品,甚至可用于远程 EKG 等医学成像。 这种平衡反向栅极场效应晶体管 (ergFET) 在晶体管栅极附近部署了一个电极,以控制和反向漏电流,这些电流在晶体管中很常见,会导致测量误差。它可以内置到阵列中以实现更高分辨率的成像,并且是一种没有移动部件的固态设备。这使得便携式和手持式传感器设计成为可能。 NASA 正在积极寻求被许可方将这项技术商业化。请通过以下方式联系 NASA 的许可礼宾部 此电子邮件地址已受到垃圾邮件机器人的保护。
美国宇航局戈达德太空飞行中心开发了一种用于微分析系统的传感器,可以实时测量被采样液体的流速和温度。电流传感器将液体转移到单独的温度和流量传感器,这可能导致流体泄漏和需要更大的初始样本。这种设计消除了这种转移。系统传感器可测量每分钟纳升范围内的流速,温度范围从 150 °C 以上到 -80 °C 以下。 该系统中的传感器封装在氮化硅 (SiN) 中,以将它们与流体流电隔离,并悬挂在通道中间,以最大限度地提高它们的灵敏度和响应时间。温度传感器用作流量传感器设计的一部分。加热器前面(之前)的温度传感器给出流体的初始温度读数。加热器后面(跟随)的传感器测量加热器能够注入流体的热量。通过知道流体的热导
为了模仿人类的五种感官,人们开发了相机和电视等电子设备。因此,科学家们不断尝试模仿触觉、嗅觉和味觉。目前,触觉传感领域的研究人员正专注于物理模拟技术,这些技术可以测量机器人抓取物体所使用的压力,但关于如何模拟人类触觉(如柔软、光滑或粗糙)的心理触觉研究还有很长的路要走。 开发了电子皮肤技术,可以像人类一样检测“刺痛”和“热”的疼痛感。该技术可应用于仿人机器人的开发,可供佩戴假手的患者使用。 电子皮肤简化了传感器结构,可以同时测量压力和温度。无论传感器的测量原理如何,它都可以应用于各种触觉系统。研究人员专注于氧化锌纳米线(ZnO 纳米线)技术,该技术被用作一种自供电的触觉传感器,由于其压电
传感器