

用 Arduino Nano 制作吃饭机器人 |金螺丝
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要的工具和机器
 |
|
应用和在线服务
 |
| |||
 |
|
关于这个项目
这个项目的想法来自我的女儿。
她想要一个机器人,这个机器人可以张开嘴,把食物放进嘴里。
所以,我在室内寻找可用的东西:纸板、Arduino Nano、超声波传感器、伺服电机......能够以最快的时间和最低的成本为女孩创造一个机器人。
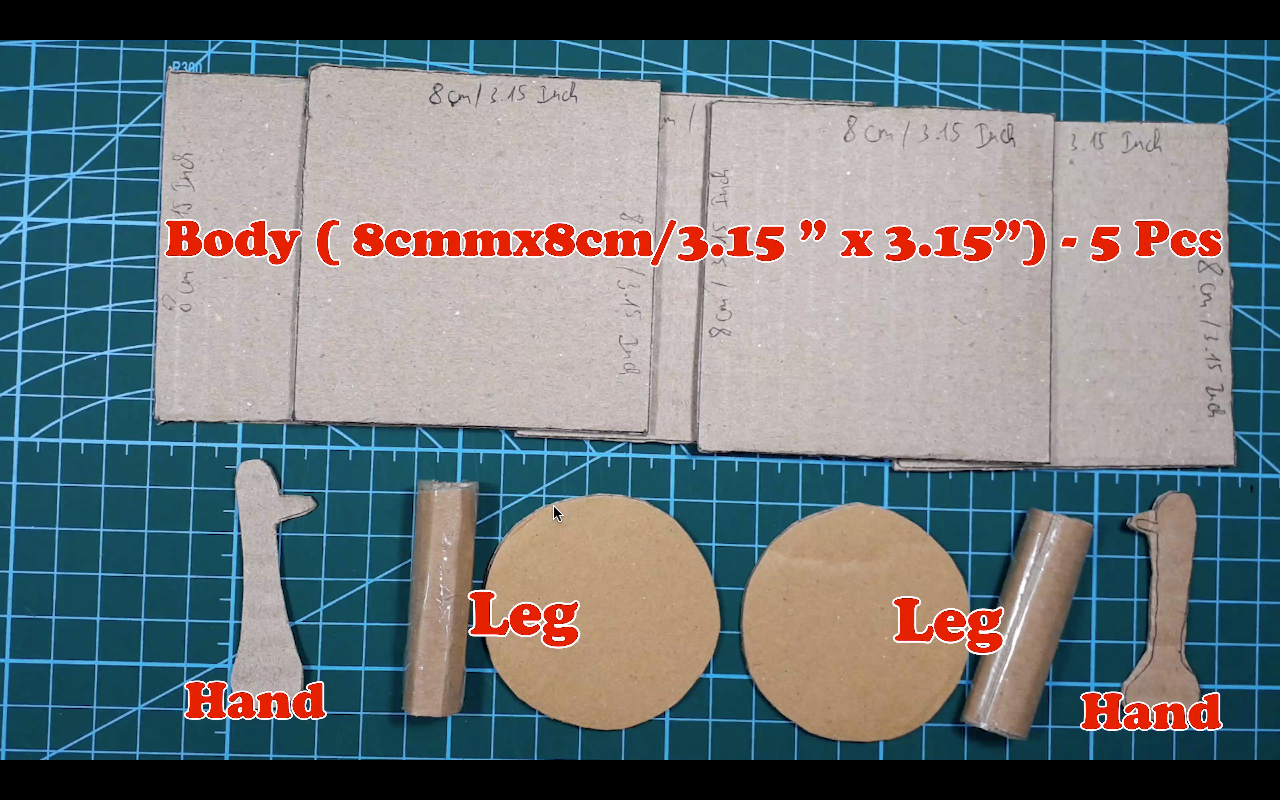
创建主体
我用纸板做机器人的身体
使用热胶将所有部件连接起来
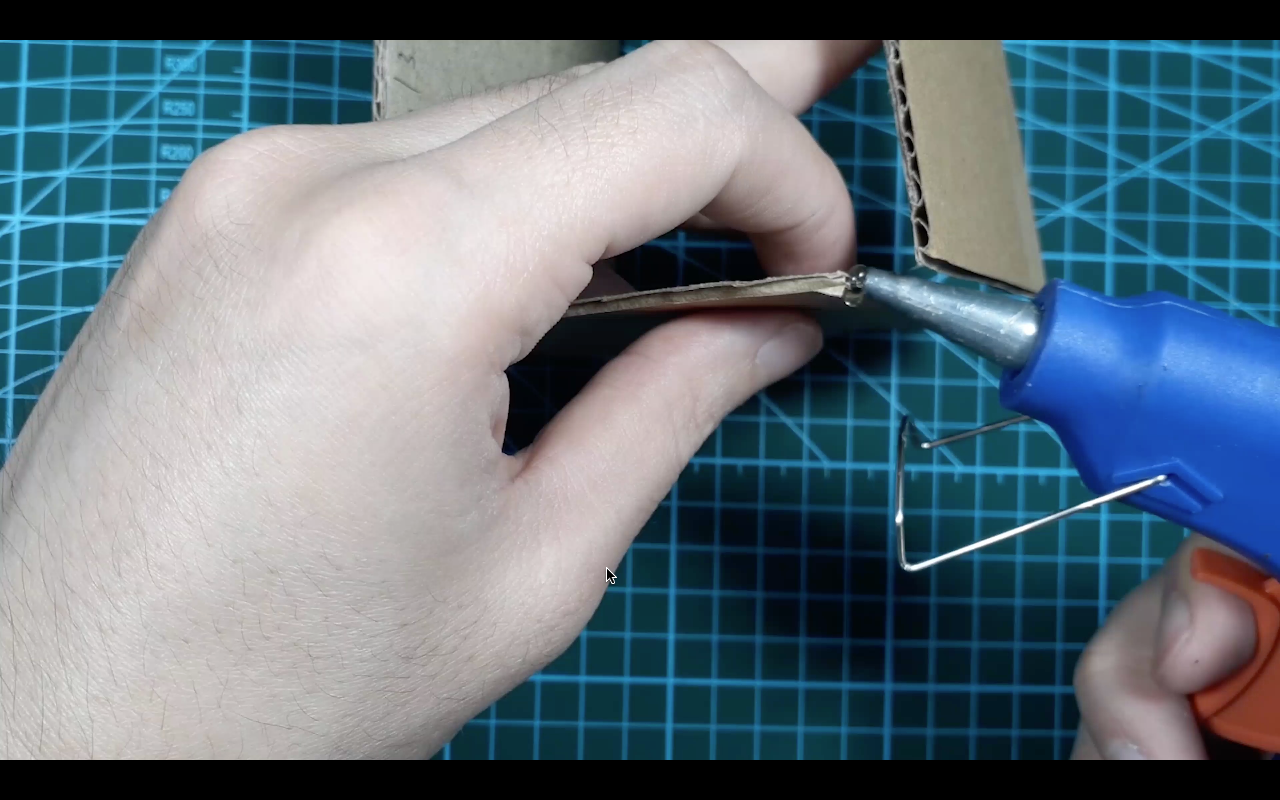
身体的大部分完成

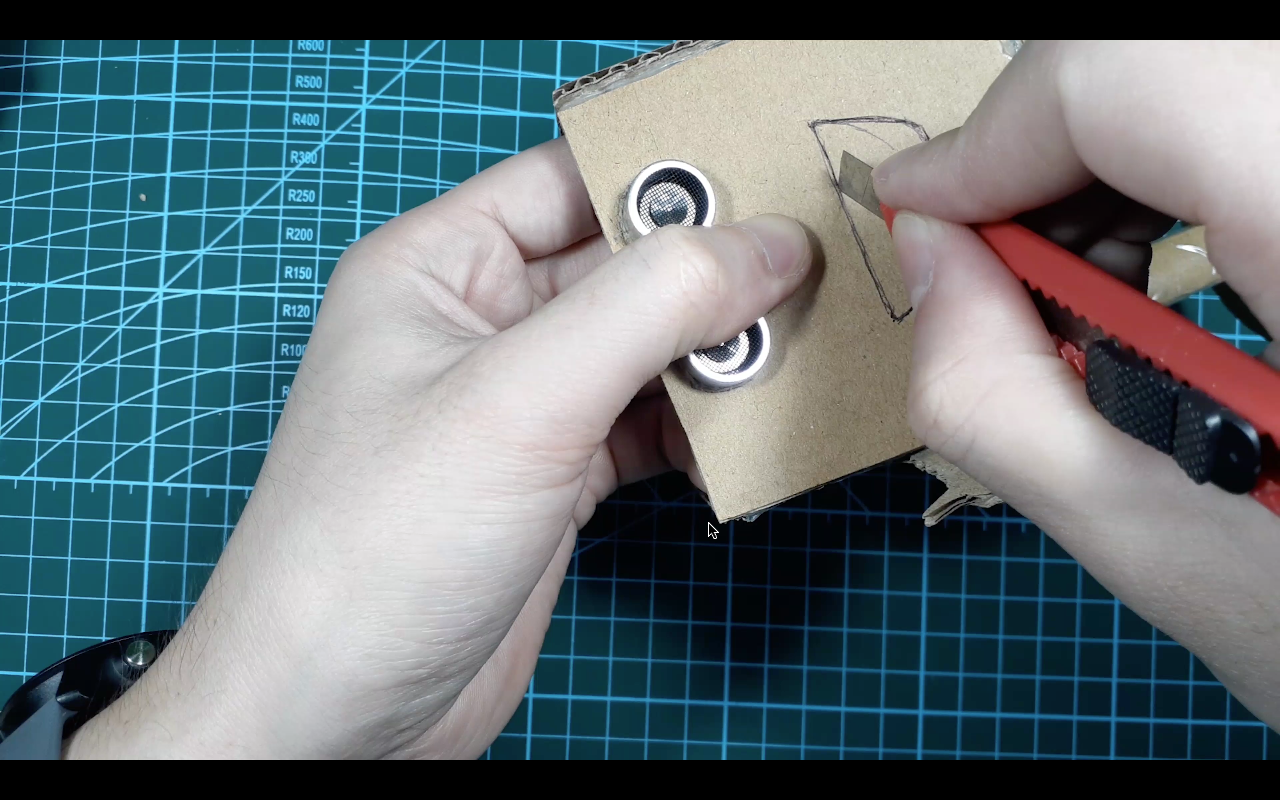
打眼孔
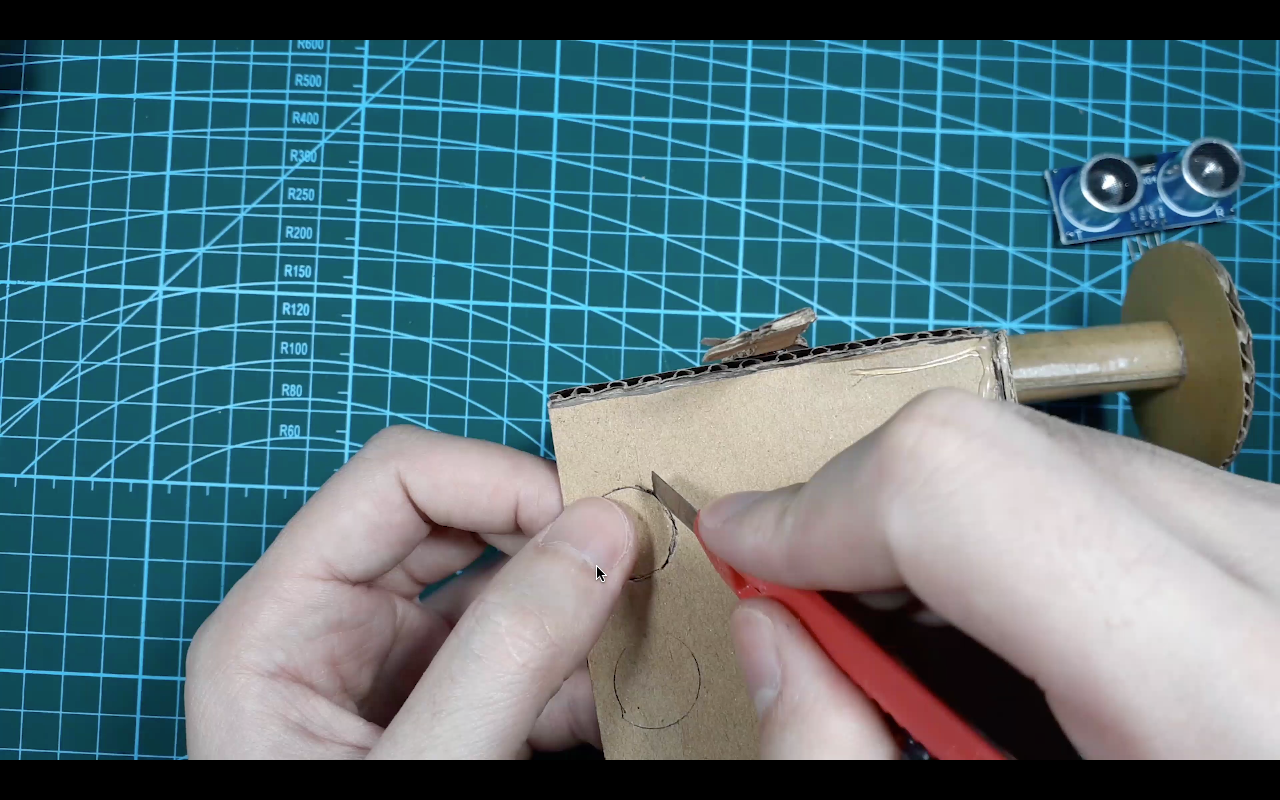
做嘴
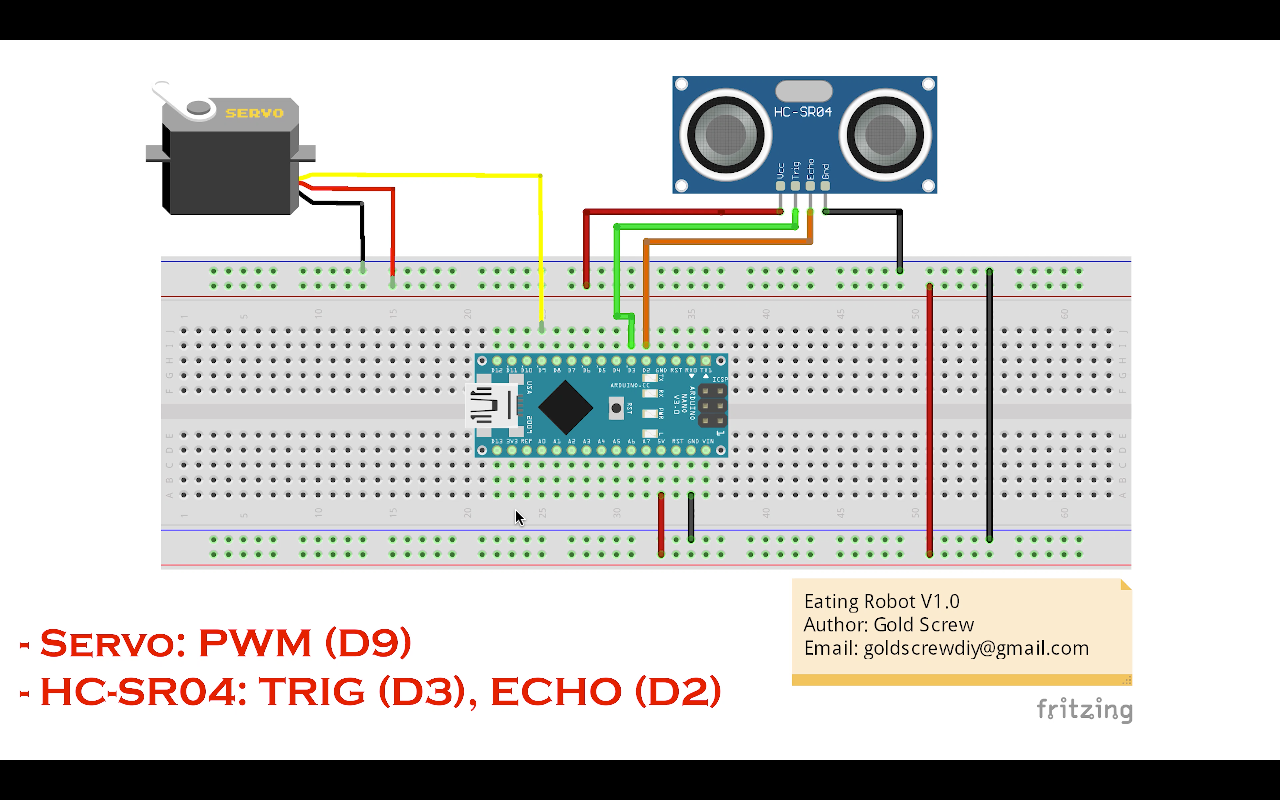
元器件/零件连接图
连接 USB 电源
测试调试
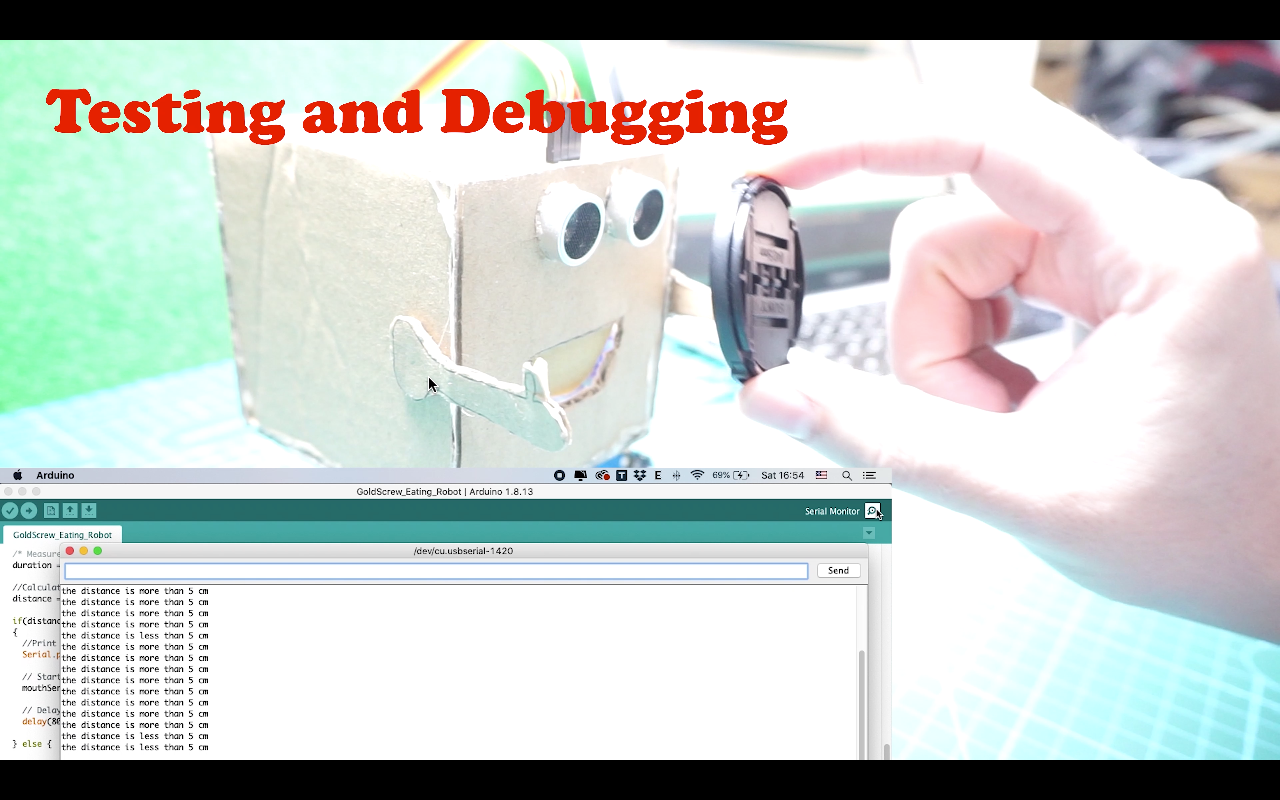
大功告成!

代码
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.inoArduino
/* * 吃纸板机器人 * 作者:GoldScrew * 电子邮件:goldscrewdiy@gmail.com * 描述:它使用 HC-SR04(检测距离 <=5 厘米的食物)和服务器(打开和关闭嘴巴)* / #include#define SERVO_PIN 9 // 为伺服设置 pin 9 // HC-SR04 超声波 sensorconst int trig =3; // HC-SR04const 触发 int echo =2; // HC-SR04 的回显// ServoServo 口伺服;void setup(){ // 串口连接波特率为960 Serial.begin(9600); // 使用 TRIG pinMode(trig, OUTPUT) 发送信号; // 使用 ECHO pinMode(echo, INPUT) 接收信号; // 口服务器mouthServo.attach(SERVO_PIN);口伺服。写(90); }void loop(){ /* Duration */ unsigned long duration;整数距离; //距离 /* 从 TRIG 引脚发送信号 */ digitalWrite(trig, 0); //停止触发引脚 delayMicroseconds(2); //延迟2微秒digitalWrite(trig, 1); //从TRIG引脚发送信号 delayMicroseconds(10); //延迟10微秒digitalWrite(trig, 0); //停止触发引脚 /* 测量 ECHO 引脚的高脉冲宽度 */ duration =pulseIn(echo, HIGH); //计算距离 distance =int(duration/2/29.412); if(distance <=5) { //打印距离Serial.println("距离小于5厘米"); // 开始张嘴mouthServo.write(0); // 延迟延迟(1200); } else { //打印距离Serial.println("距离大于5厘米"); // 关闭嘴巴mouthServo.write(90); } // 延迟延迟(200);}
示意图
制造工艺
- Arduino Gyroscope Game with MPU-6050
- Unopad - 带有 Ableton 的 Arduino MIDI 控制器
- 带伺服电机的机器人避障
- 带有 Arduino 的简单障碍物传感器
- Arduino Nano:使用操纵杆控制 2 个步进电机
- Arduino 控制的钢琴机器人:PiBot
- 带有 Arduino Nano 的手持盖革计数器
- 如何用 Arduino 制作音乐
- 如何制作基于 Arduino 的自动开门
- 使用 Android 应用程序控制 Arduino 机械臂
- 使用 Dabble 控制的 Arduino 制成的 4 轮机器人
- 如何在 Arduino 中使用 Modbus