

Arduino IoT 机械臂
组件和用品
 |
| × | 1 | |||
| × | 5 |
应用和在线服务
 |
| |||
 |
|
关于这个项目
这是我的第一个具有以下功能的机械臂:
- 5DOF 机器人,如果我们排除抓手,实际上是 4 个
- 大脑是具有物联网功能的 Arduino Yun
- 控制界面内置于 Blynk 应用程序
- 使用机器人工具箱在 Matlab 中实现正向运动
- 我编写的一个实现平滑运动的新库
我对结果非常满意。因此,我想与您分享我的经验以及如何构建它。
组件和材料
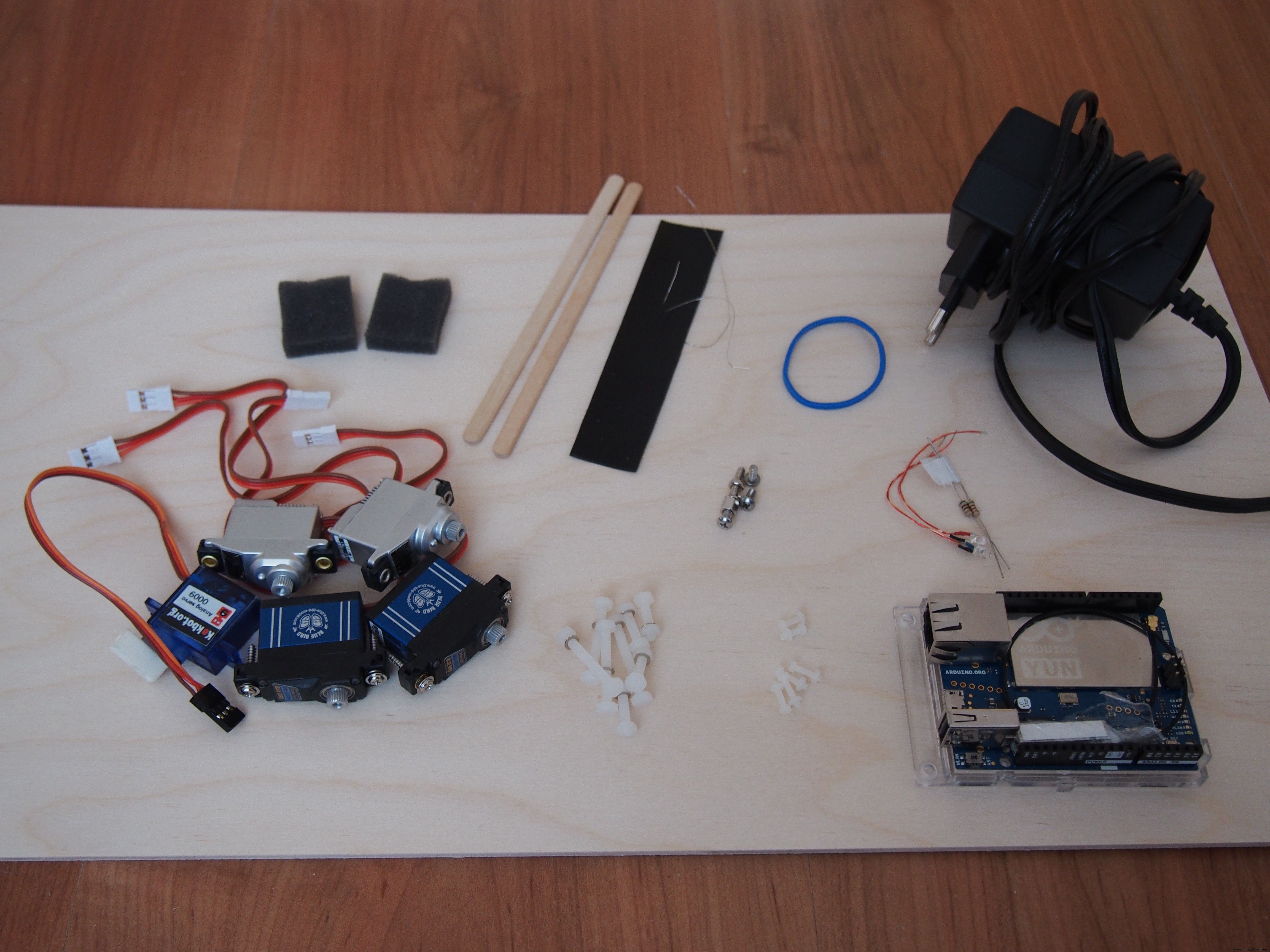
要构建您需要的机器人:
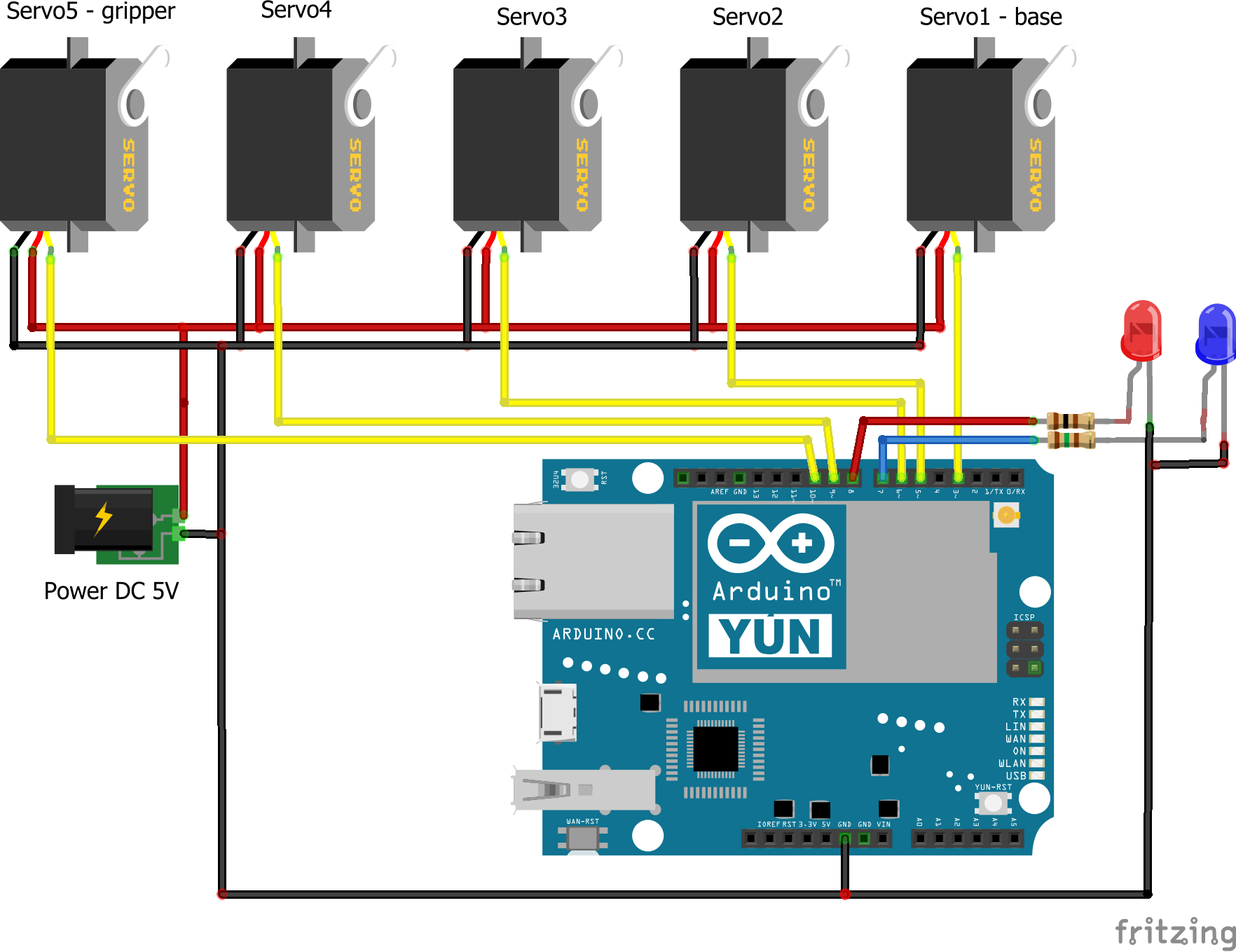
- 1 x Arduino Yun(或任何 Arduino 板)
- 5 个伺服电机
- 1 个 5V 充电器,最低 2.5 A
- 2 个 LED 灯
- 2 个电阻器,分别为 100 欧姆(红色 LED)和 150 欧姆(蓝色 LED)
- 2 x 木搅拌棒
- 1 x 金属线(或类似物)
- 1 x 塑料片(我从沐浴露瓶中取出)
- 1 x 橡皮筋
- 2 x 小海绵(见左上角)
- 9 x 塑料 M3 螺丝
- 6 x 塑料 M2.5 螺丝
- 1 x 木板 3 毫米(30 厘米 x 50 厘米应该绰绰有余)
- 1 x 木胶
- 编码时间
建造机器人
要构建机器人,首先要测量舵机尺寸并检查舵机扭矩。这将为您提供有关手臂大小以及最终机器人大小的指示。就我而言,我订购了 2 个不同的微型高扭矩舵机:第一对和第二对。即使它们被指定为 120 度,它们也可以行进 140 度。不过建议买180度舵机,行程角度更大。
对于夹持器,不需要高扭矩伺服。易趣上最便宜的微伺服可以完成这项工作。
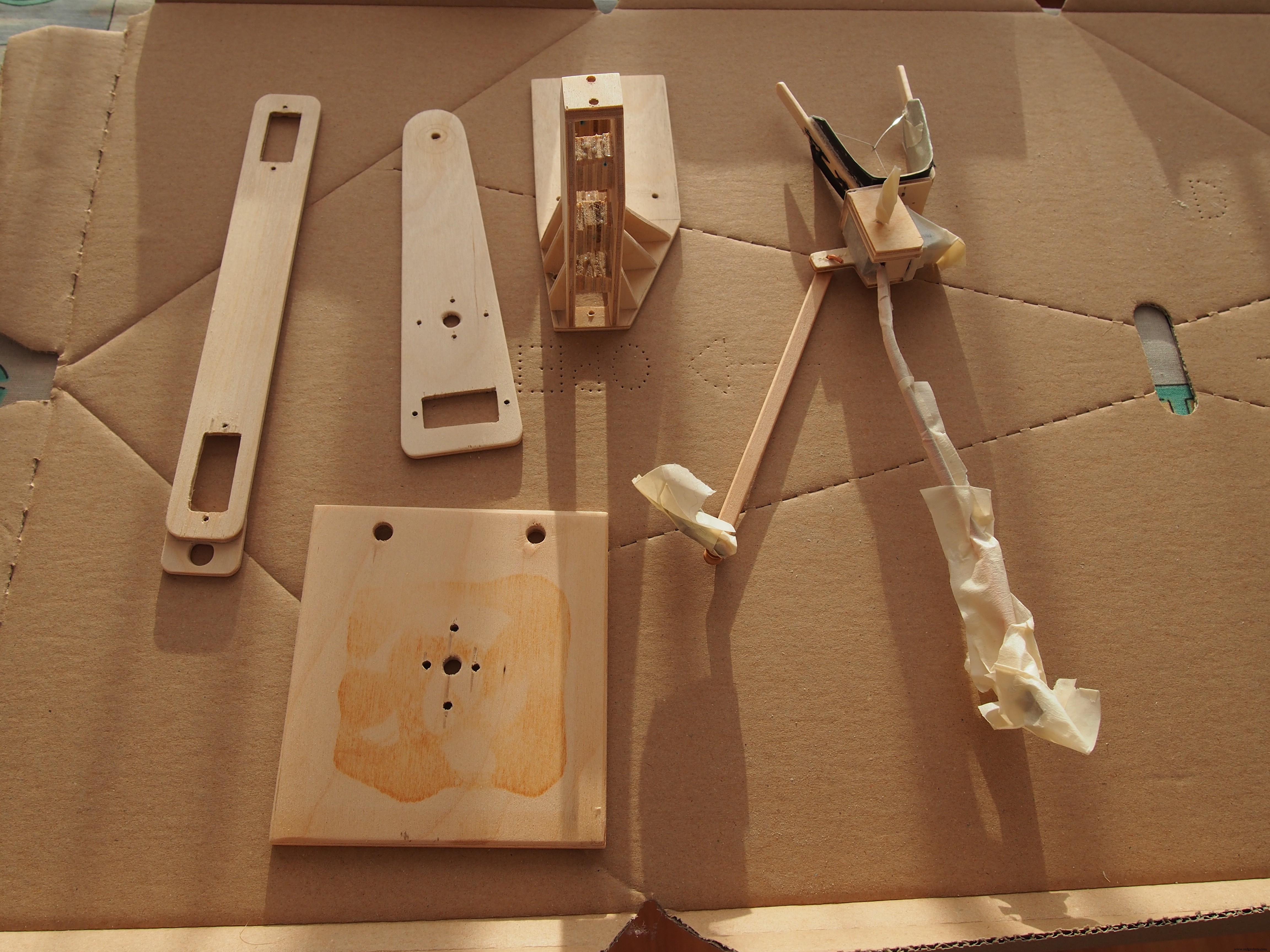
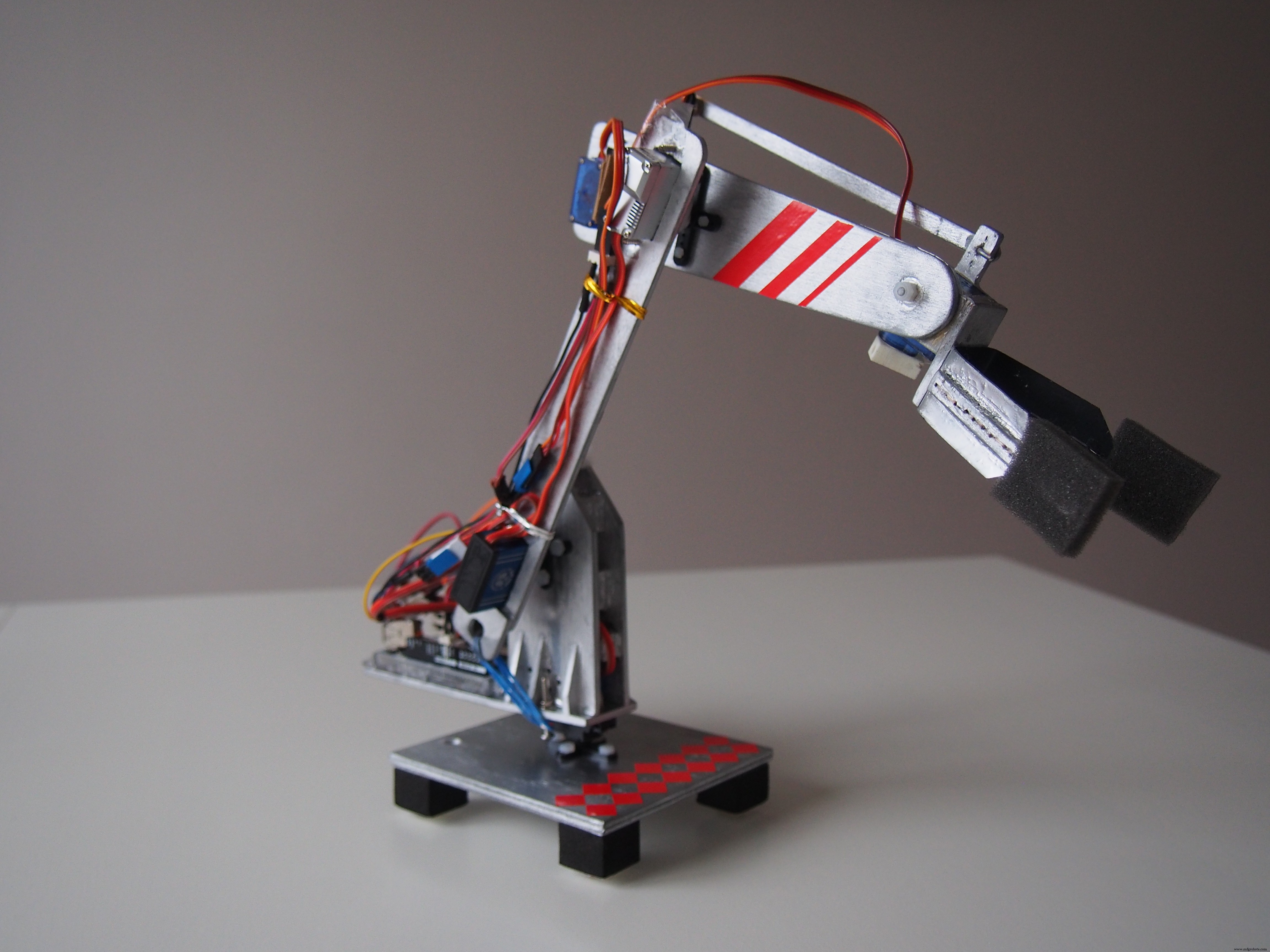
开始剪手臂,如图1所示。在这里,你可以发挥创意,没有固定的设计,你可以想出你自己的设计。然后,使用一根切成两半的混合棒和塑料板作为弹簧复位来构建夹具。将电线连接到内侧,您可以关闭和打开夹具。对于我的机器人,我使用了一个 M3 螺钉来制作夹具枢轴。夹持器的枢转由位于手臂另一侧的伺服器完成,以获得重量平衡。动力通过另一个搅拌棒传输(参见照片2,机器人顶部)。
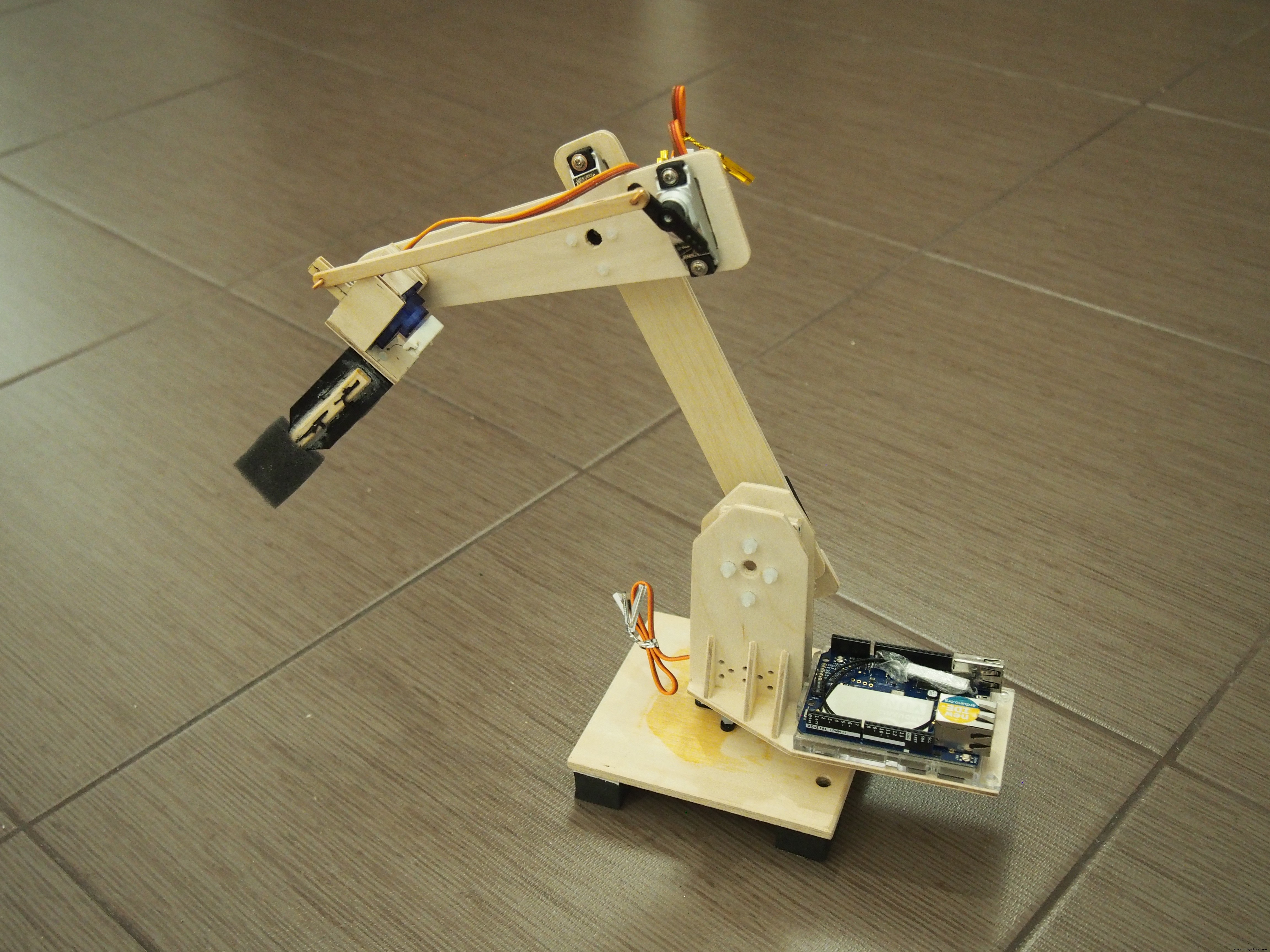
接下来,构建底座和固定底座伺服和 Arduino Yun 板(或其他板)的板。把所有东西放在一起,你应该有像照片 2 那样的东西。
如果您想要更好看的设计,请打磨木质部件并用您喜欢的颜色涂漆(如照片 3 所示)。对于我的机器人,我选择了带有红色条纹的银色(模仿金属)。最终结果如图4所示。

软件
对于软件,我首先在 Blynk 中制作了一个界面。如果您以前没有使用过 Blynk,请查看他们的网站以了解如何使用。应该非常简单和直接。
注意: 如果您没有可以连接到互联网的电路板,别担心,您仍然可以通过 USB 端口将 Blynk 与普通电路板(例如 Arduino Uno)一起使用。要做到这一点,请阅读此处。
接下来,让我们进入 Arduino IDE 并编写一些代码。为了您的方便,我附上了代码,所以您可以直接使用它:) 要运行它,您需要执行以下操作:
- 配置 Arduino Yun 板。
- 通过转到 Sketch>Include Library>Manage Libraries 在您的 Arduino IDE 中安装 Blynk 库,搜索 Blynk 并安装它。
- 将 SimpleTimer 库中名为 SimpleTimer 的文件夹添加到您的 Arduino 库文件夹中,通常是 Arduino\libraries\
- 将我编写的 MotionGenerator 库添加到 Arduino 库文件夹中名为 MotionGenerator 的文件夹中
- 编译并上传 RobotArm_instructables.ino (注意:不要忘记更新您的 Blynk 令牌)
注意: MotionGenerator 库是一种基于分析的解决方案,可为您提供从一个点到另一个点的平滑过渡。它允许限制最大速度和加速度。
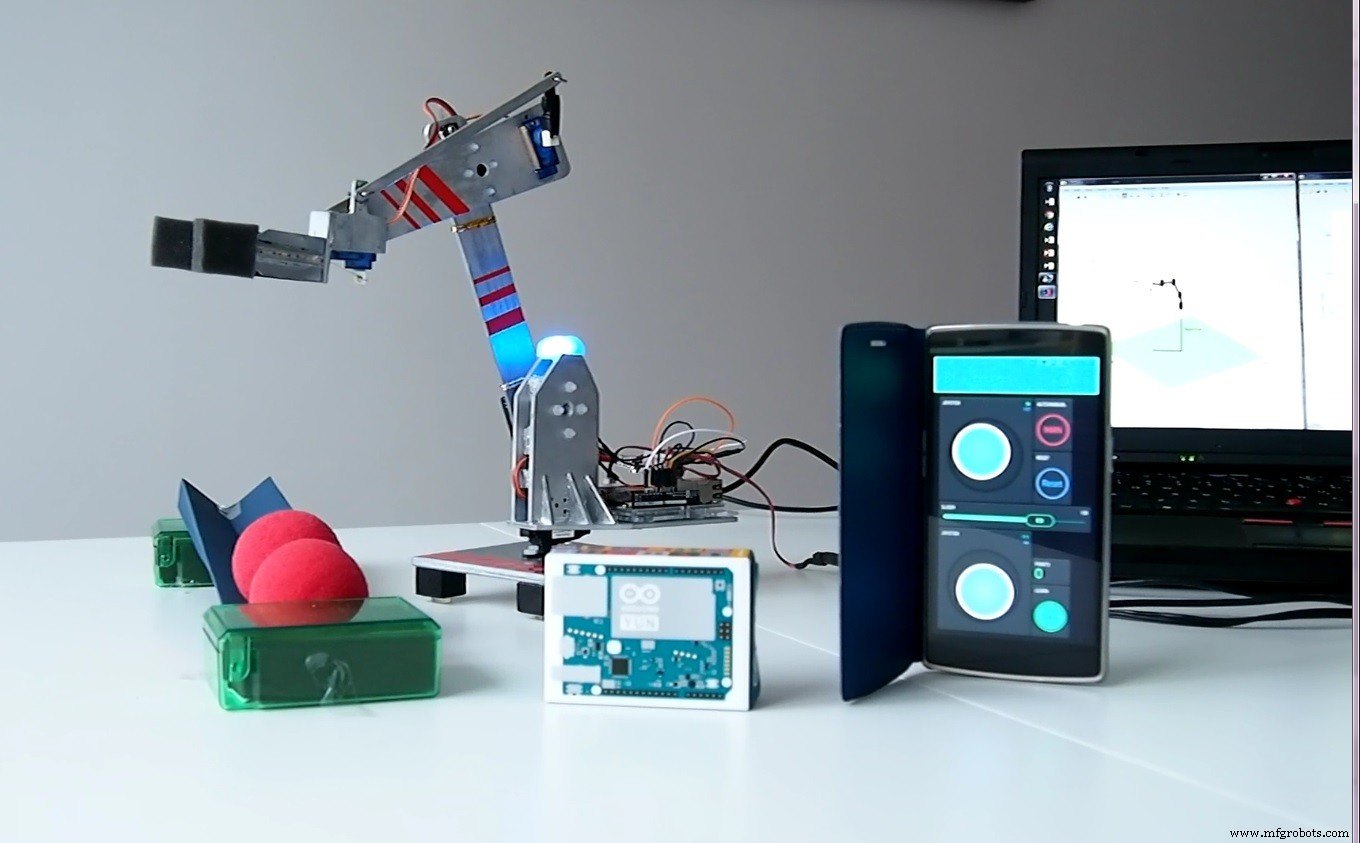

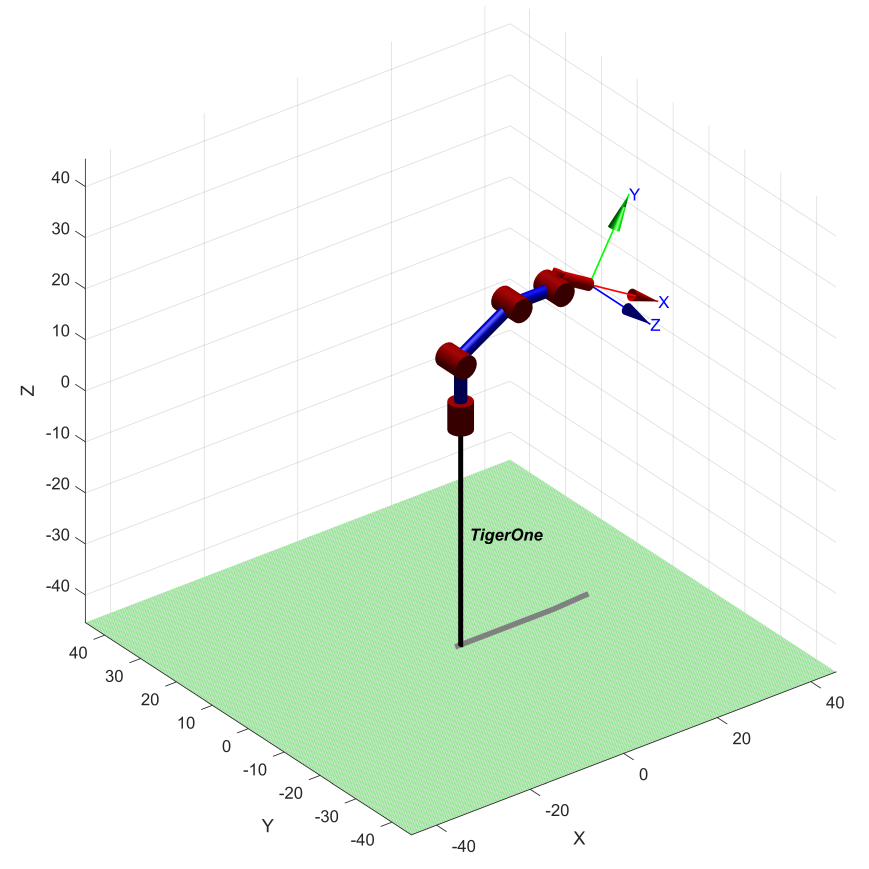
可选(正向运动学,见上面的照片 3): 为此,您需要 Matlab 和 Robotics Toolbox。如果您已设置好所有这些,请确保您的机器人已连接到 Blynk 并连接到计算机的 USB 端口。 Matlab 将通过串行通信从 Arduino 收集信息。因此,请确保在 MainScrip.m 中填写正确的 COM 端口。最后,只需运行 MainScrip.m。
注意:机器人运动学适用于我自己的机器人。对于您的机器人,尺寸可能会有所不同(请在 robotsKinematicsFcn.m 中随意调整)。
代码
- 源文件
源文件C/C++
包含源代码文件的 Zip 存档。无预览(仅限下载)。
示意图
制造工艺