

Arduino的动态Web控件
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | <表类=“部分体” 风格=“宽度:100%”> | Seeed伺服电机 | |
| 跳线 |
关于这个项目
简介
如果你是初学者,我建议你阅读有关的Arduino - 伺服电机和Arduino的 - 无线上网
要的Arduino连接到互联网,我们需要使用某种类型的网络屏蔽,如以太网屏蔽,无线屏蔽,屏蔽PHPoC或PHPoC无线上网屏蔽。
PHPoC罩的突出特点是,它不仅提供互联网连接如以太网和无线屏蔽,而且还提供了一个Web服务器,它允许控制并从Web浏览器监控的Arduino。它还支持网页套接字,因此我们可以控制和监视的Arduino实时而不重新加载的网页。
PHPoC盾有一些内置的Web应用程序。参考此链接更多的细节。
在该项目中,我改变的UI(用户界面)网络远程控制/幻灯片 web应用,以及根据从web浏览器接收角写Arduino的代码来旋转伺服电机角。
接线
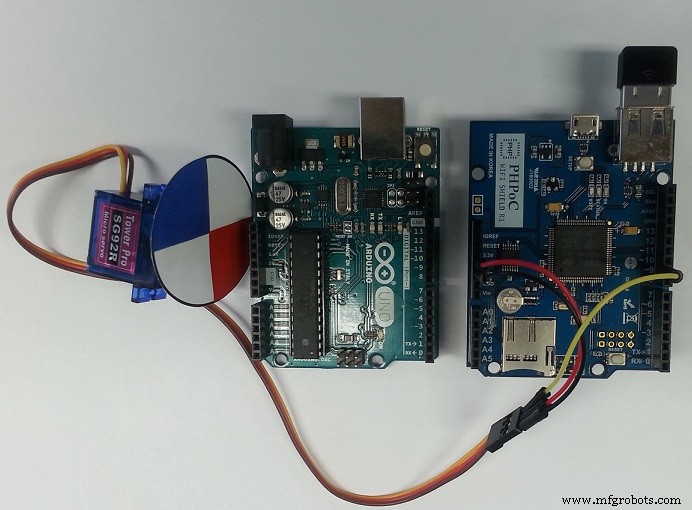
- 上的Arduino堆栈PHPoC屏蔽
- 连接销GND,VCC和伺服电机到GND,5V和Arduino的的销9的信号,分别
数据流
的Web浏览器---> PHPoC盾---> Arduino的的
Web App将计算基于触摸或鼠标事件的角度,它通过网页套接字发送到PHPoC屏蔽。当接收到该数据,PHPoC屏蔽它传递给Arduino的。 Arduino的旋转伺服根据角度马达。
我们需要做什么
- 为 PHPoC shield 设置 Wifi 信息(SSID 和密码)
- 将新 UI 上传到 PHPoC shield
- 编写 Arduino 代码
设置无线上网的信息为PHPoC盾
看到此指令:http://www.phpoc.com/support/manual/p4s-347_user_manual/contents.php?id=network_first_setup
上传新的UI PHPoC盾
- 下载PHPoC源代码remote_rotate.php(上代码部分)
- 上传到PHPoC屏蔽根据该指示使用PHPoC调试器
写Arduino的代码
- 为Arduino的上Arduino的IDE(见指令)安装库和重新启动的Arduino IDE。
- 在Arduino的IDE,转到文件 ->示例 -> Phpoc -> WebRemoteSlide和文件 ->实施例 ->伺服>扫描
- 联合两个例子为一个,我们有经由网页的代码,以控制伺服电机(见代码部分中的源代码)。
测试
- 点击Arduino的IDE串行按钮来查看IP地址
- 打开web浏览器,输入http:// replace_ip_address 的 /remote_rotate.php
- 点击连接按钮和测试
适合初学者的最佳 Arduino 入门套件
如果你正在寻找一个Arduino套件,看到的最好的Arduino套件入门
函数参考
- Arduino - 伺服库
- Servo.attach()
- Servo.write()
- Servo.writeMicroseconds()
- Servo.read()
- Servo.attached()
- Servo.detach()
- Serial.begin()
- Serial.println()
- 延迟()
- for循环
- while循环
- 如果其他
- 环()
- 设置()
- String.toInt()
代码
- remote_rotate.php
- Arduino 代码
remote_rotate.php <小> PHP
PHPoC盾<DOCTYPE HTML!> - Web遥控器用于Arduino的 <风格>体{文本对齐:中心;字体大小:15pt; }h1 { 字体粗细:粗体;字体大小:25pt; }h2 { 字体粗细:粗体;字体大小:15pt; }button { 字体粗细:粗体;字体大小:15pt; }
Web遥控器/旋转
<画布ID =“远程” 宽度=“400 “HEIGHT =” 400 “>
的WebSocket:<跨度ID =” ws_state “>空结果,角度:<跨度ID =” 调试“> 0
<按钮ID =“bt_connect” 类型=“按钮” 的onclick =“connect_onclick();”>连接
Arduino 代码Arduino
/ * Arduino的web服务器 - 遥控器(滑动开关)* /#包括 “spi.h中” #包括 “Phpoc.h” 的#includePhpocServer服务器(80);伺服myservo; //创建伺服对象来控制一个servochar slideName; INT slideValue;无效设定(){Serial.begin(9600);而(!串行); Phpoc.begin(PF_LOG_SPI | PF_LOG_NET); //Phpoc.begin(); server.beginWebSocket( “remote_slide”); Serial.print("WebSocket 服务器地址:"); Serial.println(Phpoc.localIP()); myservo.attach(9); //高度上销9向伺服对象myservo.write(1)的伺服; }void loop() { // 等待新客户端:PhpocClient client =server.available();如果(客户端){字符串slideStr =client.readLine();如果(slideStr){slideValue =slideStr.substring(1).toInt(); myservo.write(slideValue); Serial.print( “角度:”); Serial.println(slideValue); } }}
制造工艺