

通过蓝牙命令无线控制机器人论文报告 | DIY 项目
机器人被定义为能够执行人类任务或以类人方式行为的机械设计。建造机器人需要专业知识和复杂的编程。它是关于构建系统并将电机、声纳传感器和电线以及其他重要组件放在一起 |电子与通信工程专业学生的最后一年项目 |电气工程。
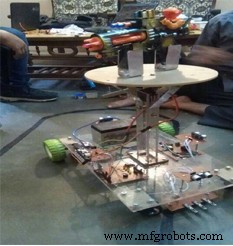 本文介绍了能够感知敌人的机器人的设计和构造。这个机器人实现 以下概念:环境传感、比例电机控制。该机器人通过微控制器(Arduino mega)处理来自其各种传感器和关键硬件元素的信息。它使用声纳传感器来检测火灾事故。能够感知敌人并射击的机器人。声纳传感器将用于初始检测。一旦检测到敌人,机器人将在几秒钟内自动打开蜂鸣器,机器人启动并开始向敌人开火。该项目有助于在机器人技术领域产生兴趣和创新,同时努力寻找一种实用且可行的解决方案,以挽救生命并降低财产损失的风险。
本文介绍了能够感知敌人的机器人的设计和构造。这个机器人实现 以下概念:环境传感、比例电机控制。该机器人通过微控制器(Arduino mega)处理来自其各种传感器和关键硬件元素的信息。它使用声纳传感器来检测火灾事故。能够感知敌人并射击的机器人。声纳传感器将用于初始检测。一旦检测到敌人,机器人将在几秒钟内自动打开蜂鸣器,机器人启动并开始向敌人开火。该项目有助于在机器人技术领域产生兴趣和创新,同时努力寻找一种实用且可行的解决方案,以挽救生命并降低财产损失的风险。 1.1 概述
该项目包括一个无线控制的机器人层次结构,因为它是通过控制机器人运动的蓝牙设备的命令来控制的。该机器人是完全远程的,可提供要控制的区域的完整视图。1.2 目标和目的:
该项目的主要目标是为武装部队无法控制的地区提供安全保障。因此,由于它的大小和易于控制,这个机器人可以进入这些地方。目标: • 提供用于分析的远程监控应用程序。 • 允许用户使用机械臂操纵敌人。 • 为安全场所提供视觉反馈。 • 提供非常人性化的控制应用程序。 1.3 系统范围声明 :机器人使用控制应用程序,在用户端使用无线技术远程控制机器人。来自用户的输入通过蓝牙设备串行传输到机器人,在那里它被接收、识别并中继到适当的模块。· 系统的输入来自用户,用于机器人的运动。 · 此输入首先由控制应用程序处理,并通过蓝牙链路串行传输。然后在机器人处接收该输入并再次处理。 · 系统的输出是经过处理的信号到相应的模块。该模块可以是机器人底座的电机。
主要输入输出:
· 输入信号· 机械臂运动· 机器人的运动。我们将其设计为安全团队的辅助机器人,但该机器人还有许多其他应用。 它可以用于: • 警察:在人质情况下 • 军队:用于侦察任务 • 空军基地:它将用于处理危险或放射性物质。1.4 理论基础和组织
论文共分五章。这里介绍一个简短的解释: 第 1 章:介绍本章讨论了与论文目标背景和研究结构有关的问题
. 第 2 章:文献综述 本章主要讨论蓝牙设备,有关本论文主题的一些文献也包含在本章中。 第 3 章:工具和技术 本章讨论了用于项目制作的所有工具和软件第 4 章:方法 第四章将重点介绍与论文主题相关的拟敌探测机器人的仿真设计过程、方法和理论实现。 第 5 章:结果与分析该机器人经过实际测试和验证。测试包括设计机器人传感系统的效率及其性能。
第 6 章:结论 最后,对所获得的结果进行了总结。这也包括工作中的新奇之处以及对未来工作的建议。希望本文对电子和通信工程 .请联系我们获取完整的论文报告
工业技术