

Speed Line Follower Robot V4
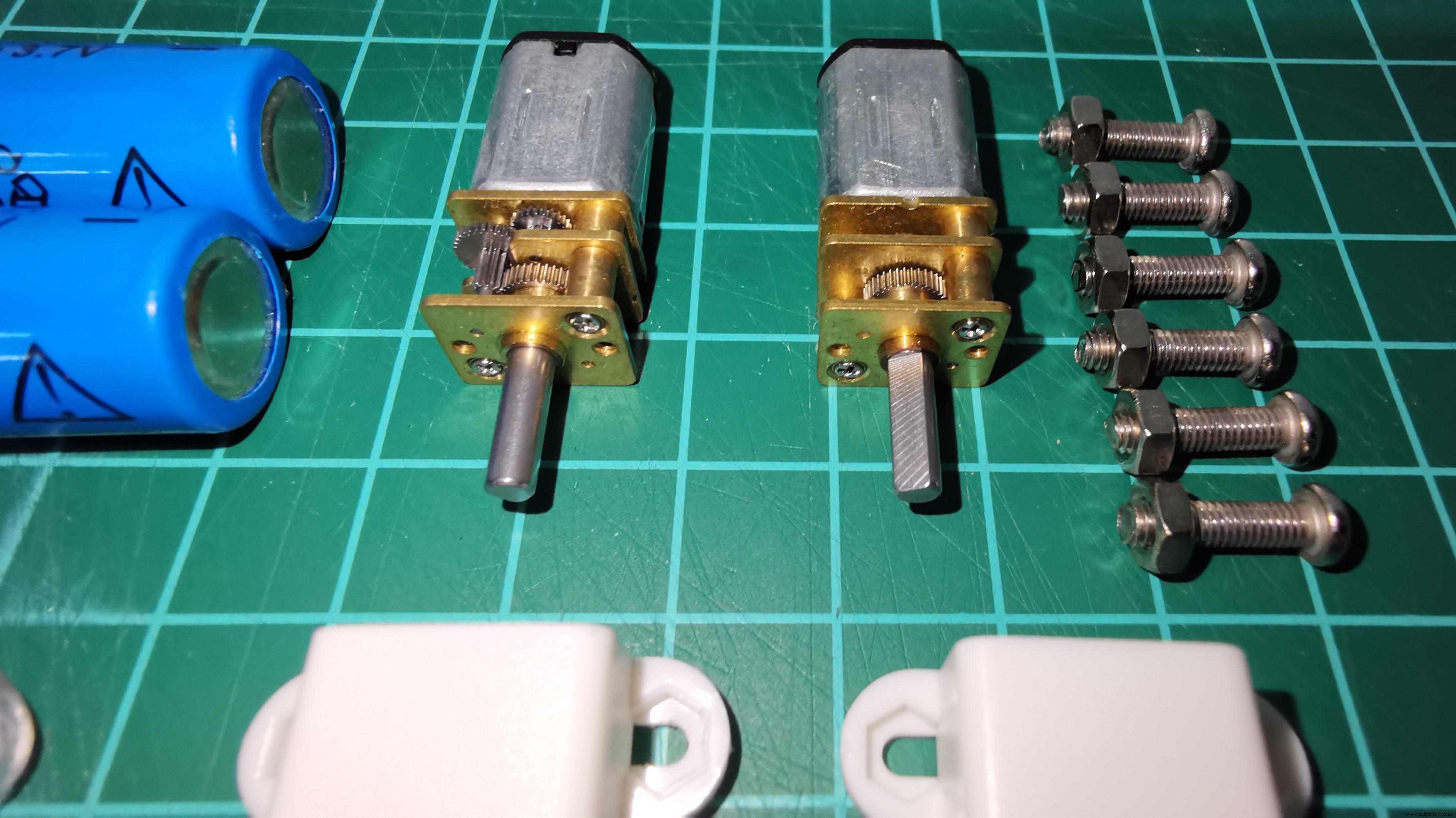
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 8 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 8 | ||||
| × | 11 | ||||
| × | 5 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 |
必要的工具和机器
 |
| |||
 |
| |||
 |
| |||
 |
|
应用和在线服务
 |
|
关于这个项目
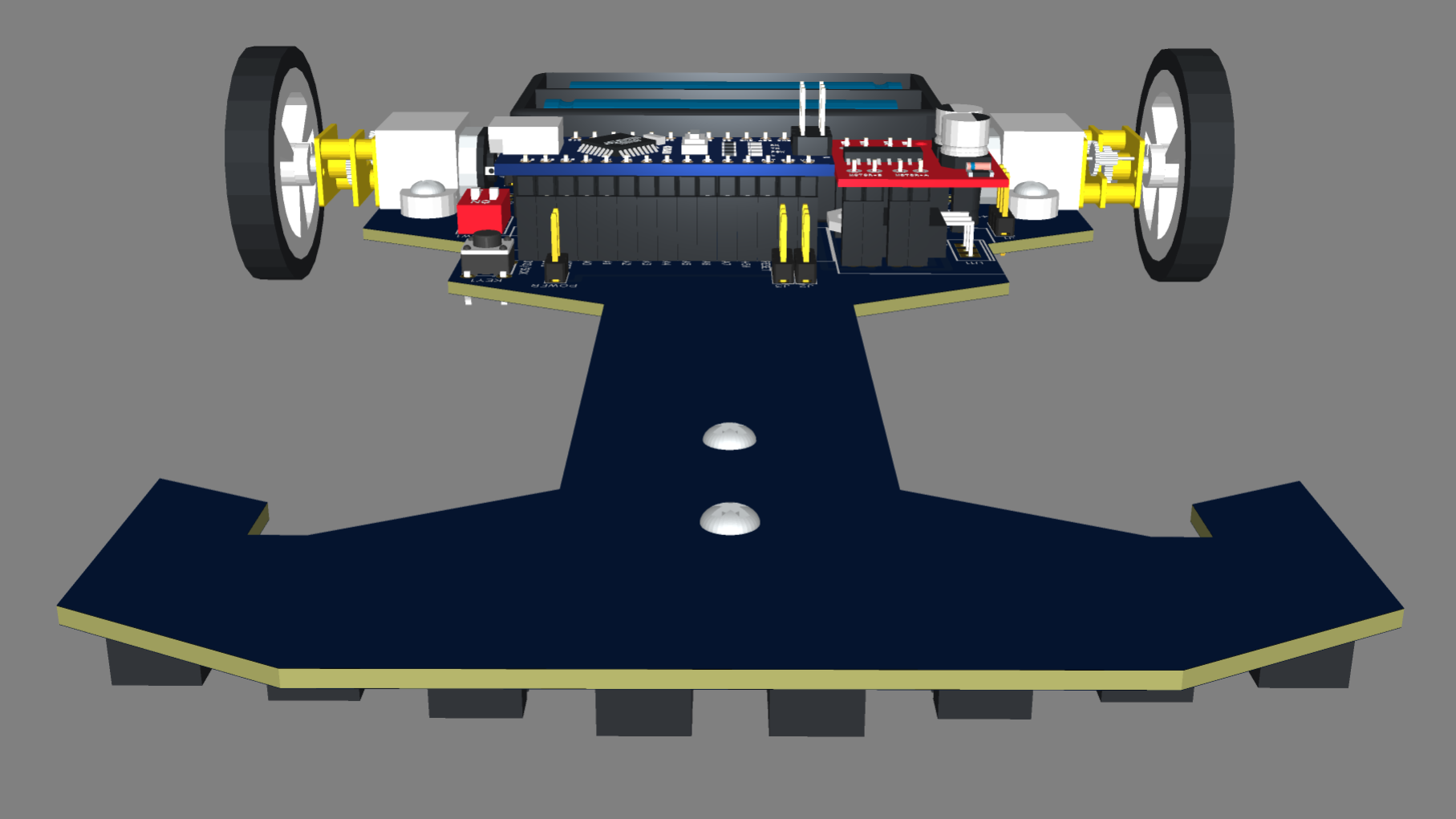
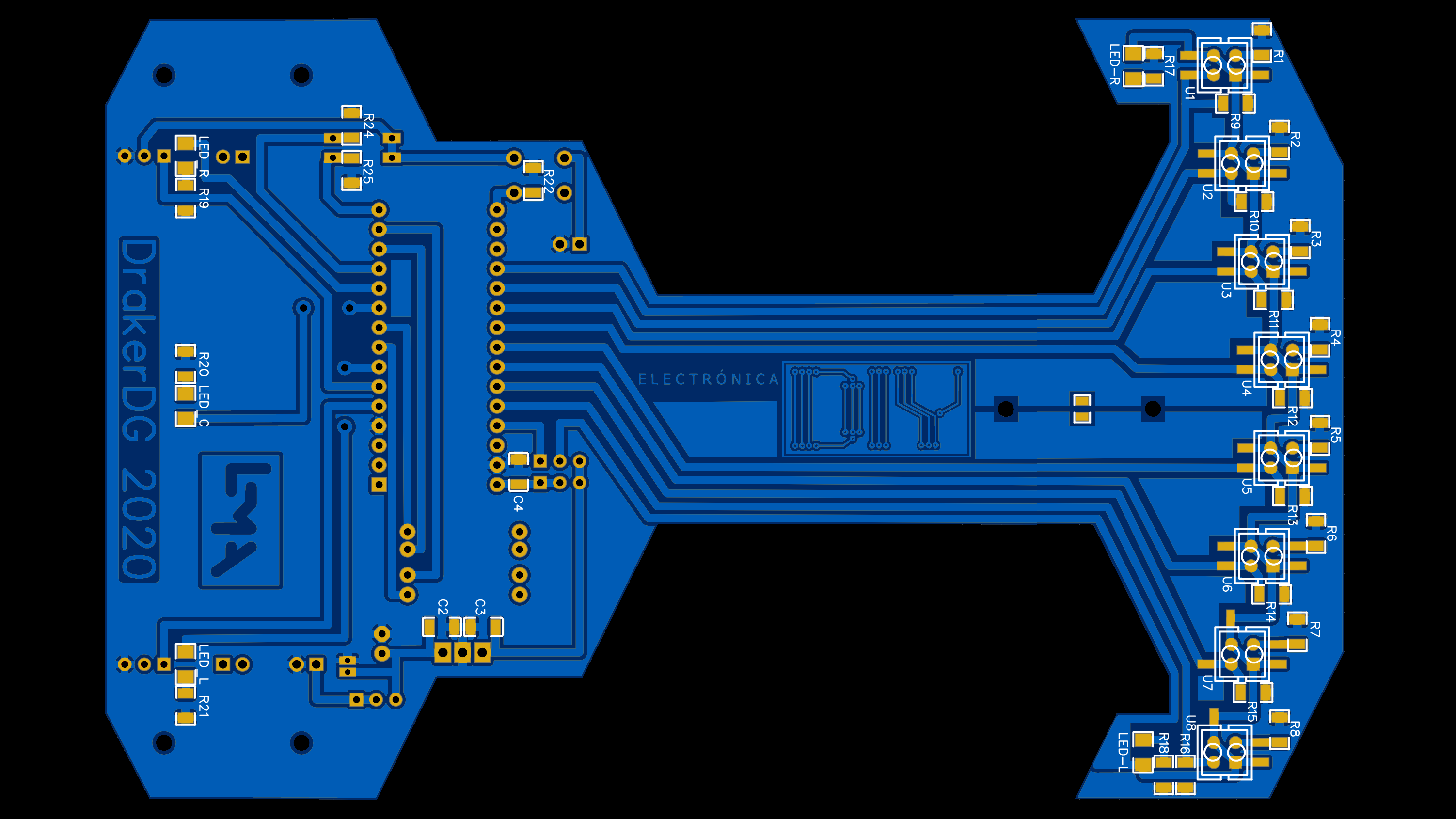
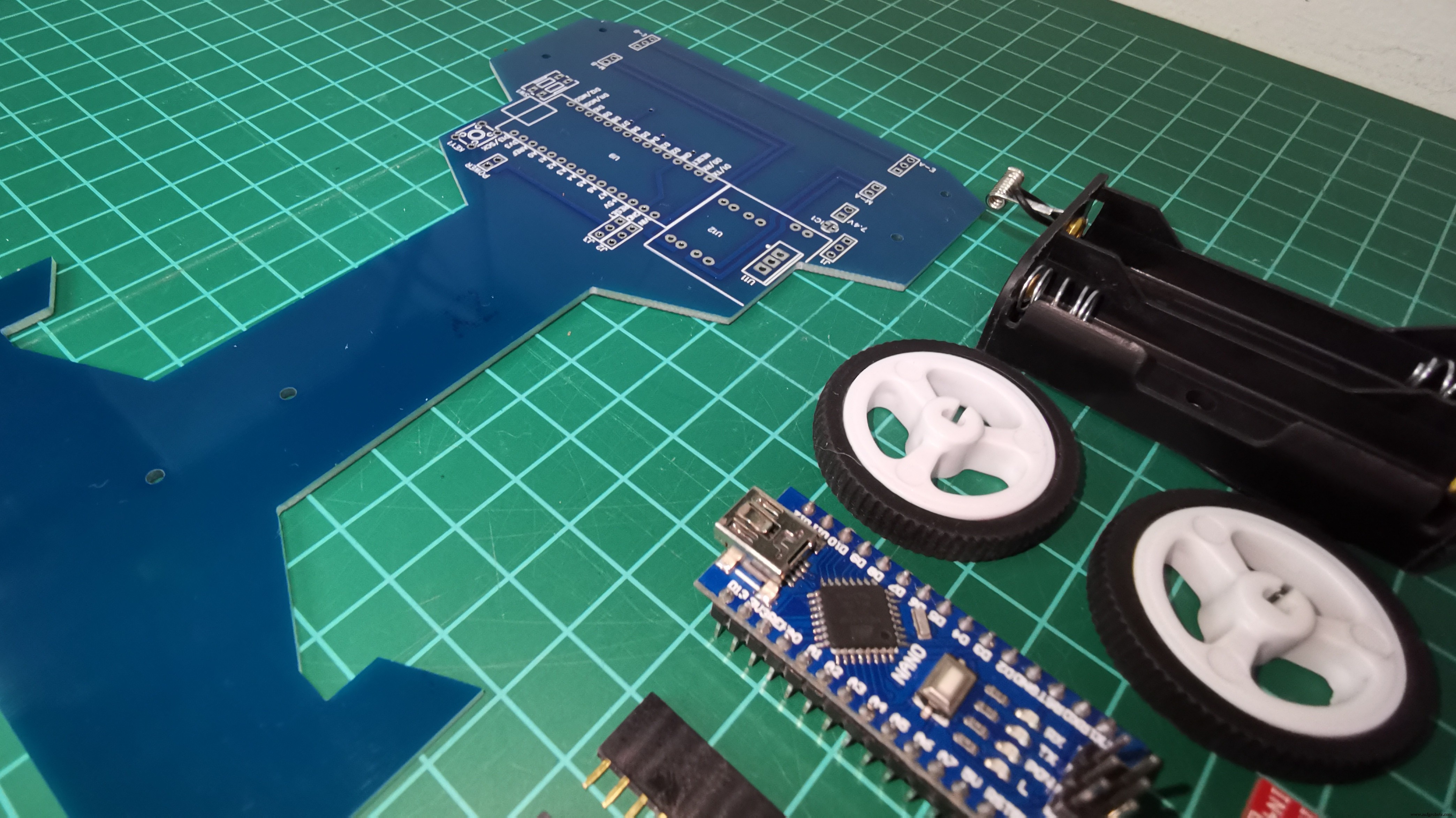
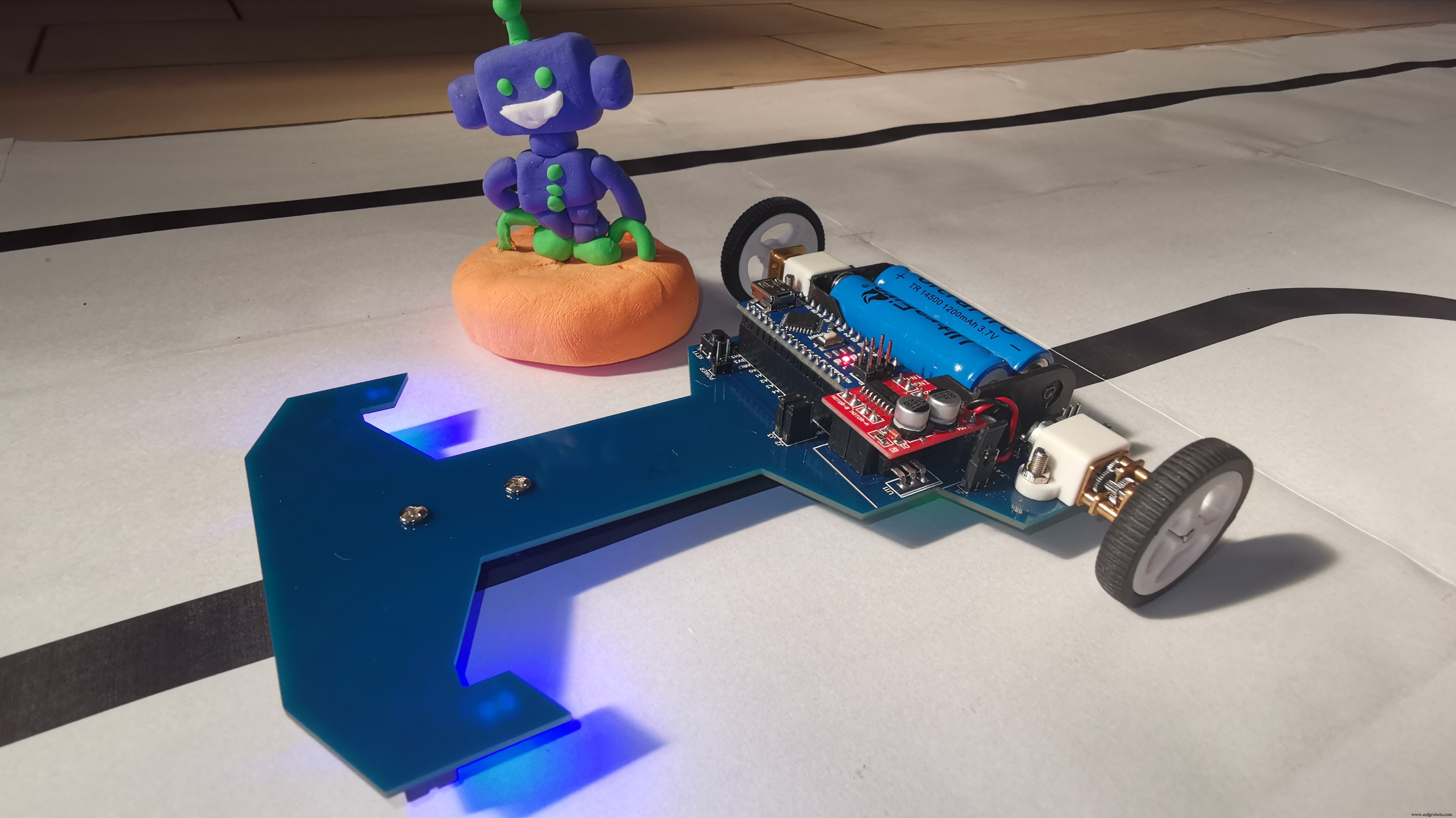
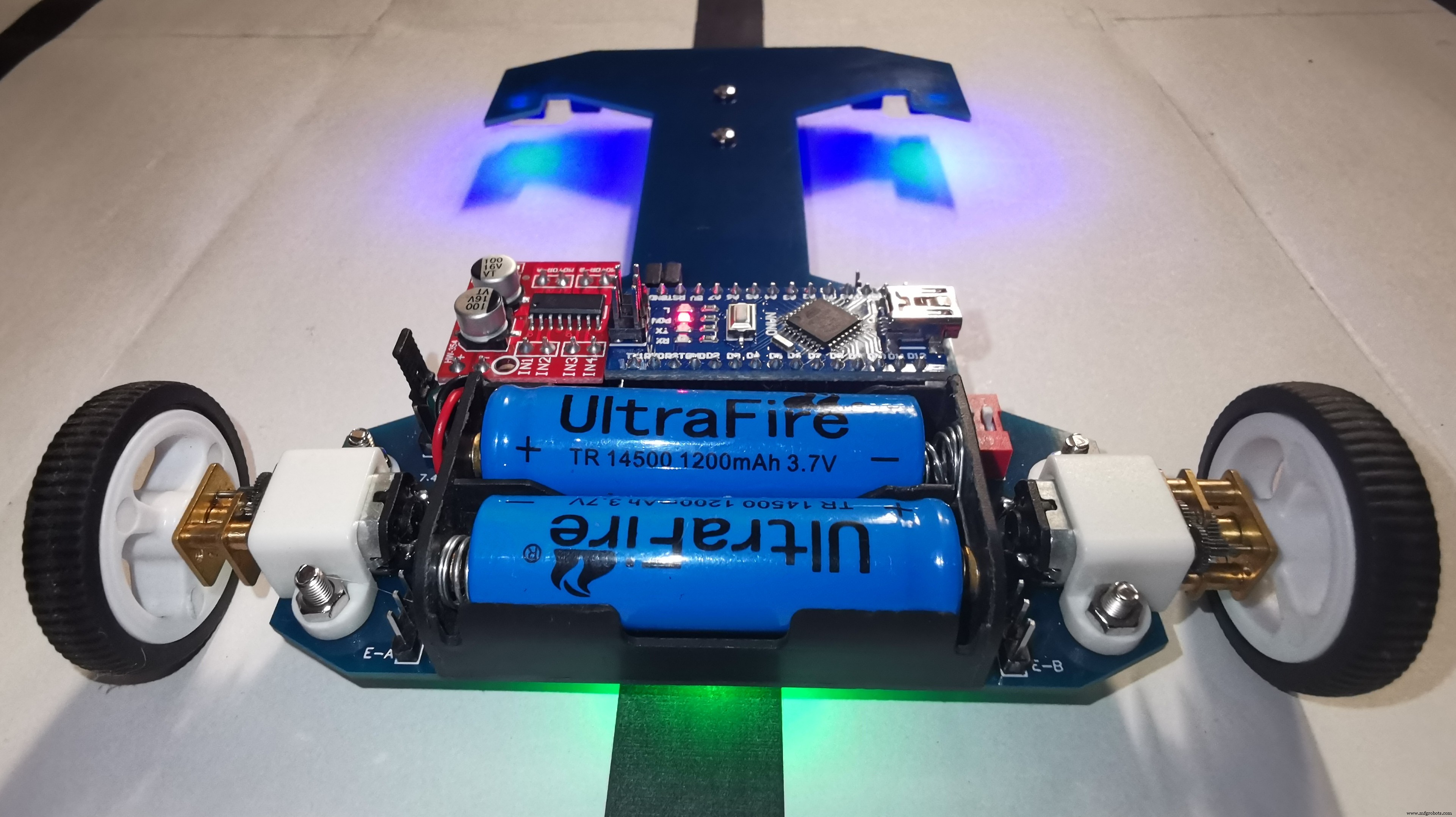
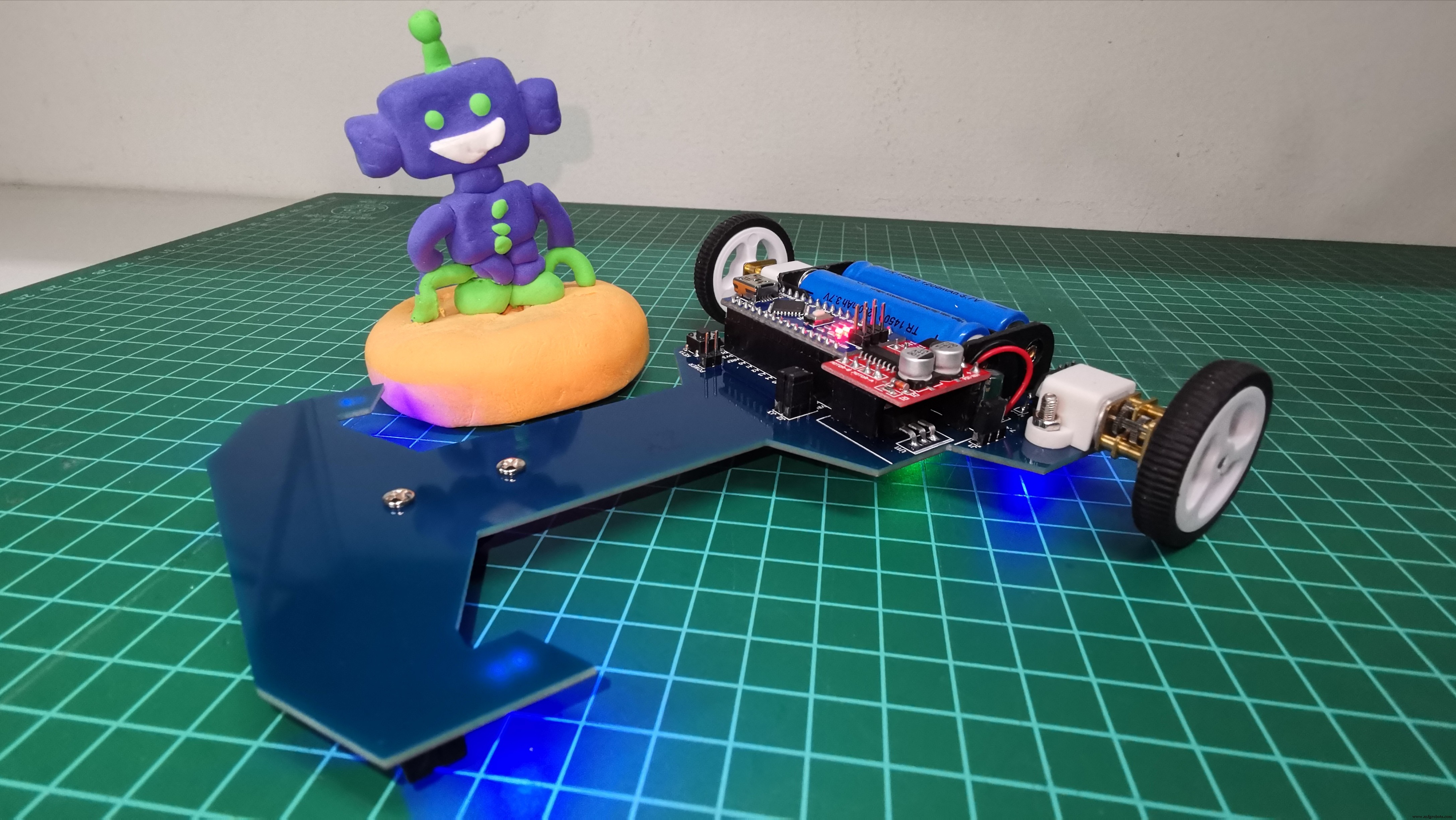
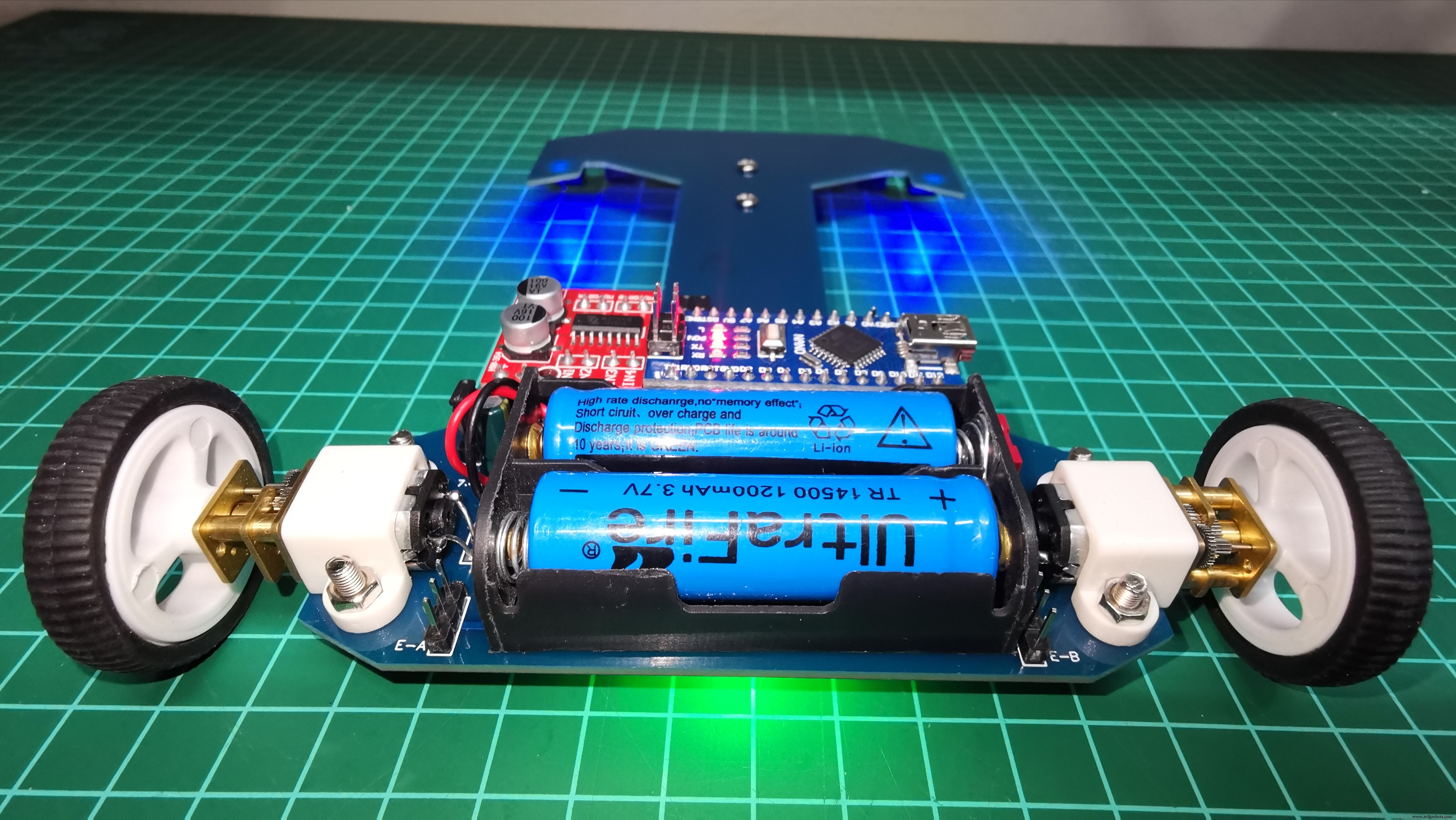
这是我的第二个 Line Follower Robot(第 4 版)。与前一个不同,我使用 EasyEDA 进行了印刷电路的设计。该印刷电路充当机器人的底盘。 PCB 制造由 JLCPCB 进行,我必须说他们以令人印象深刻的质量和创纪录的交货时间超出了我的预期。
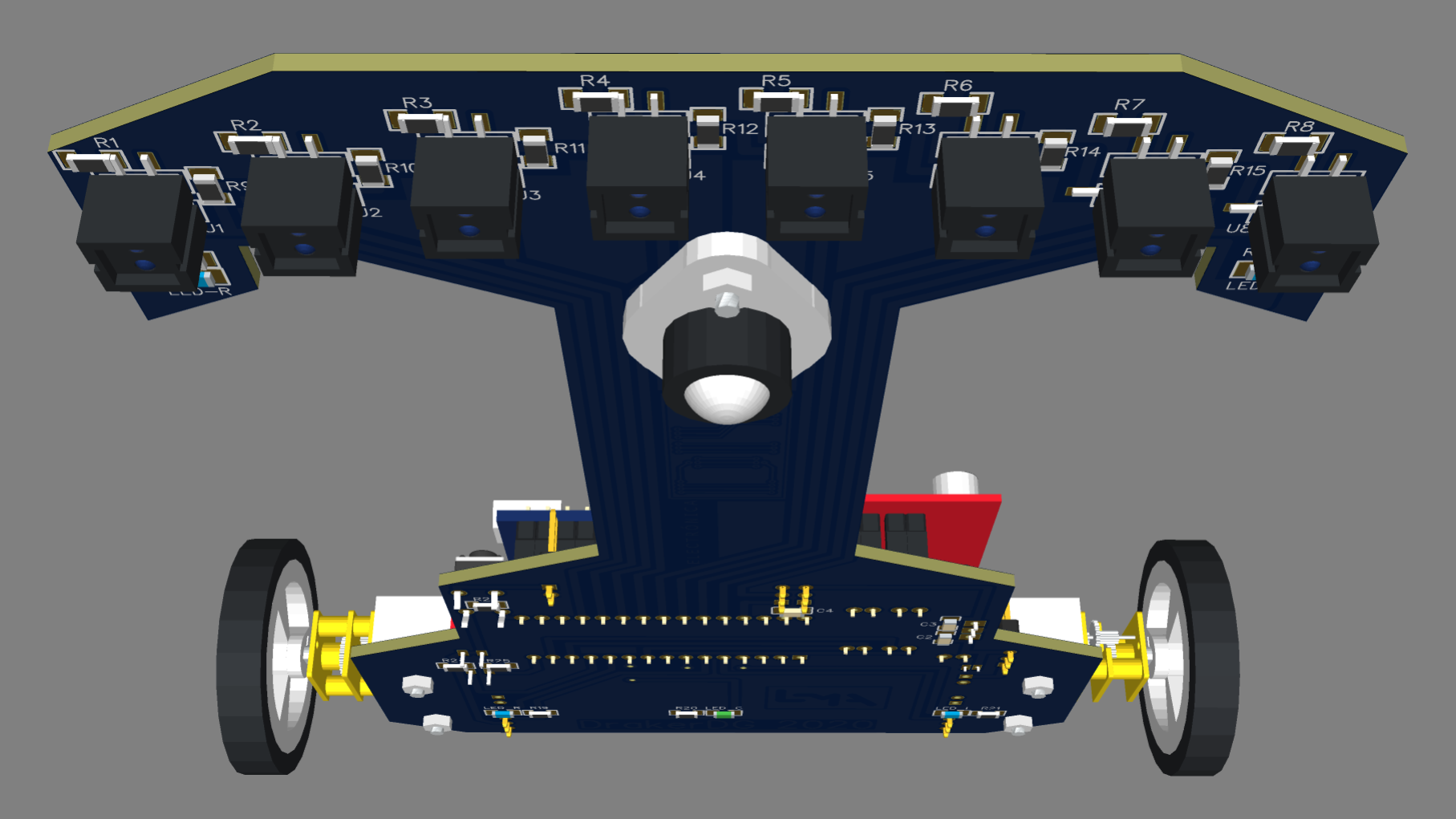
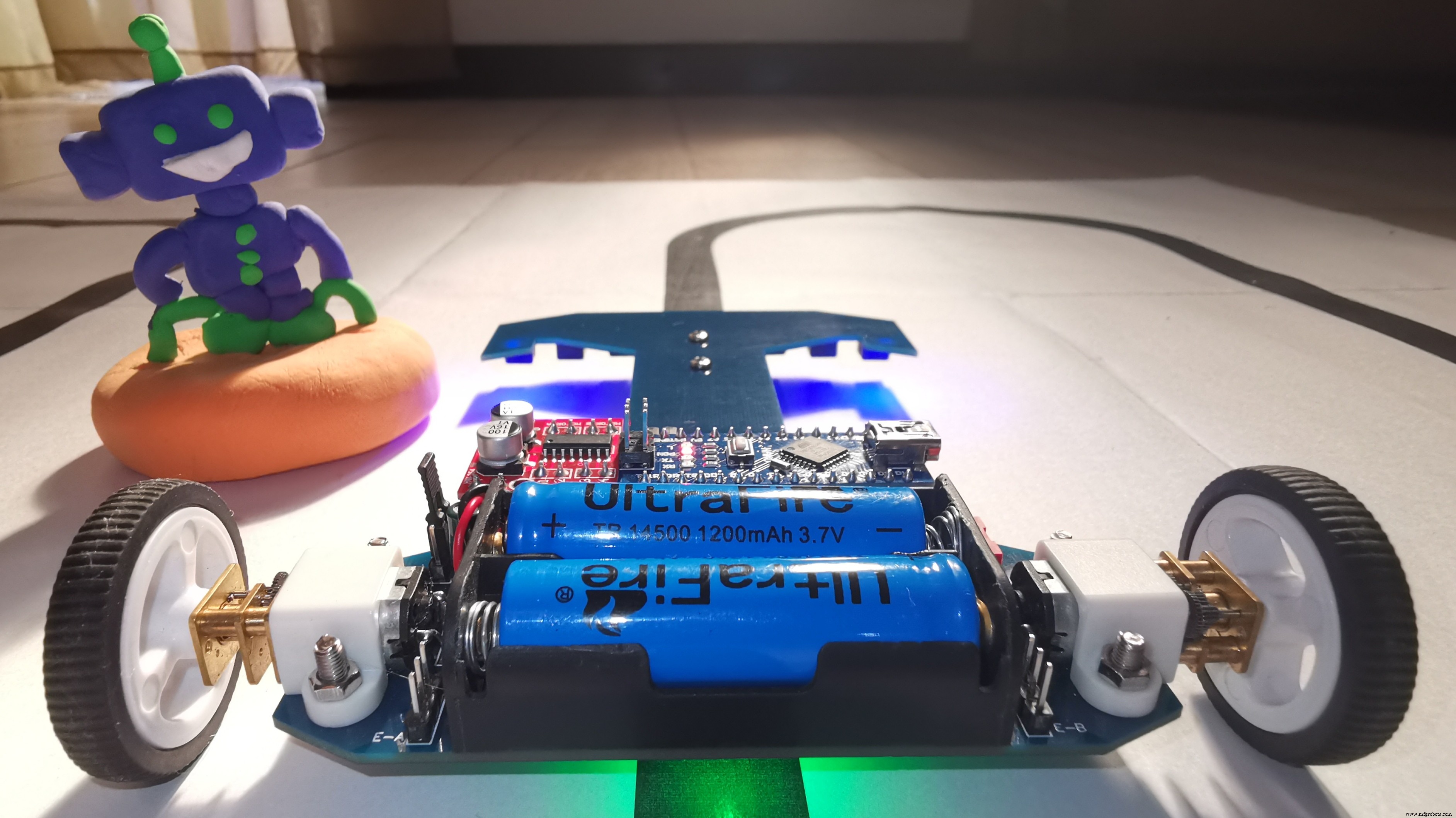
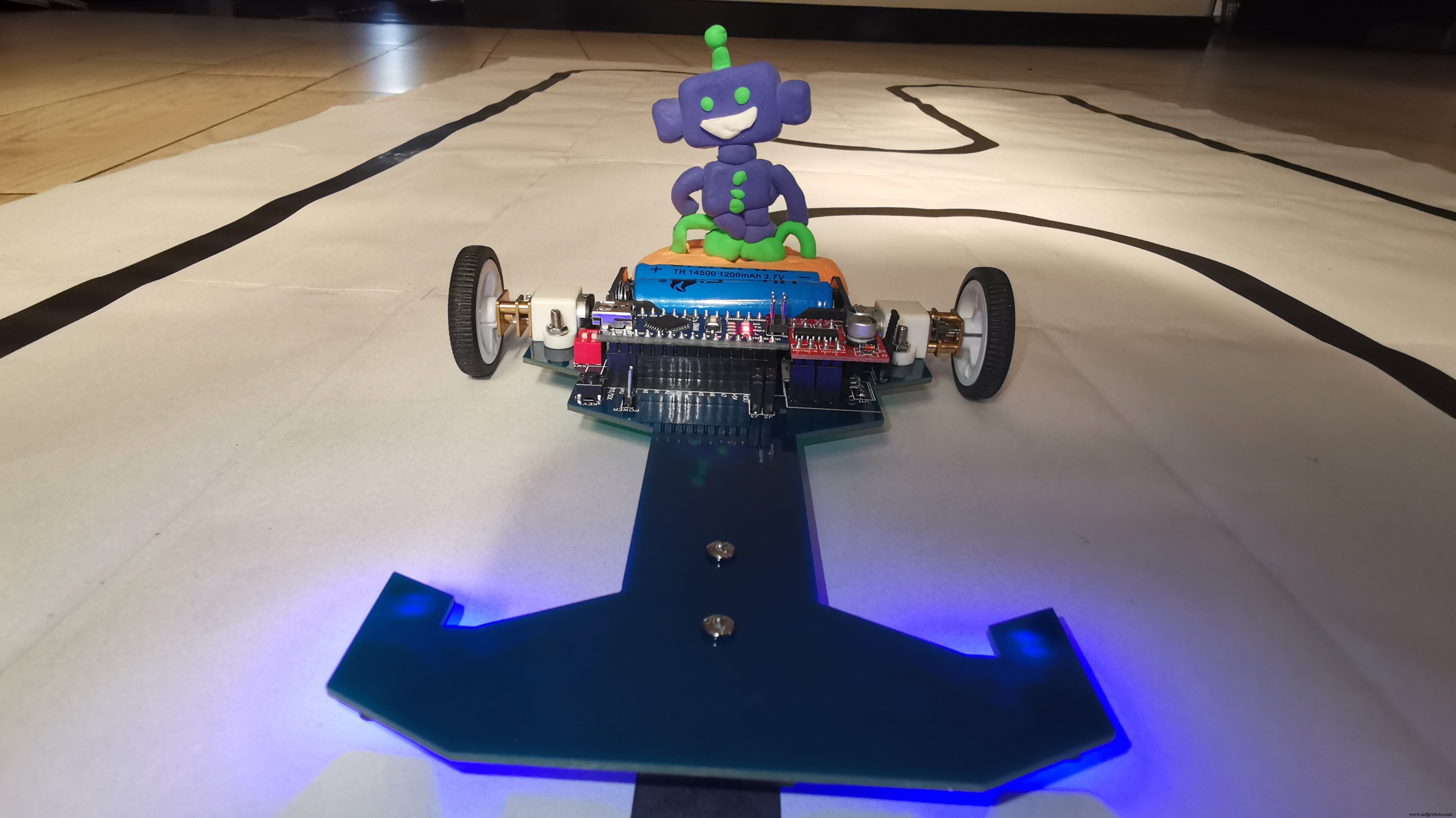
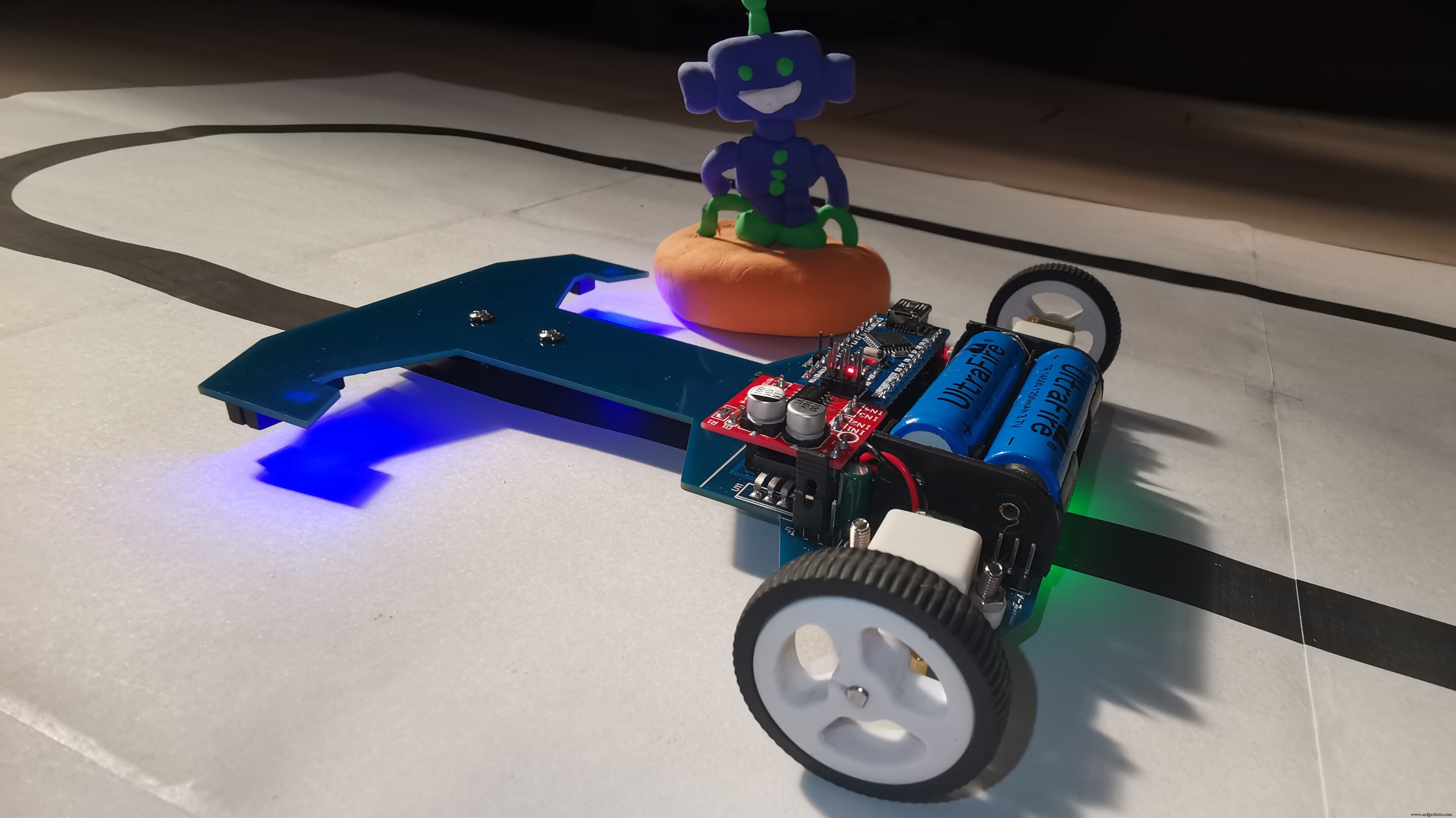
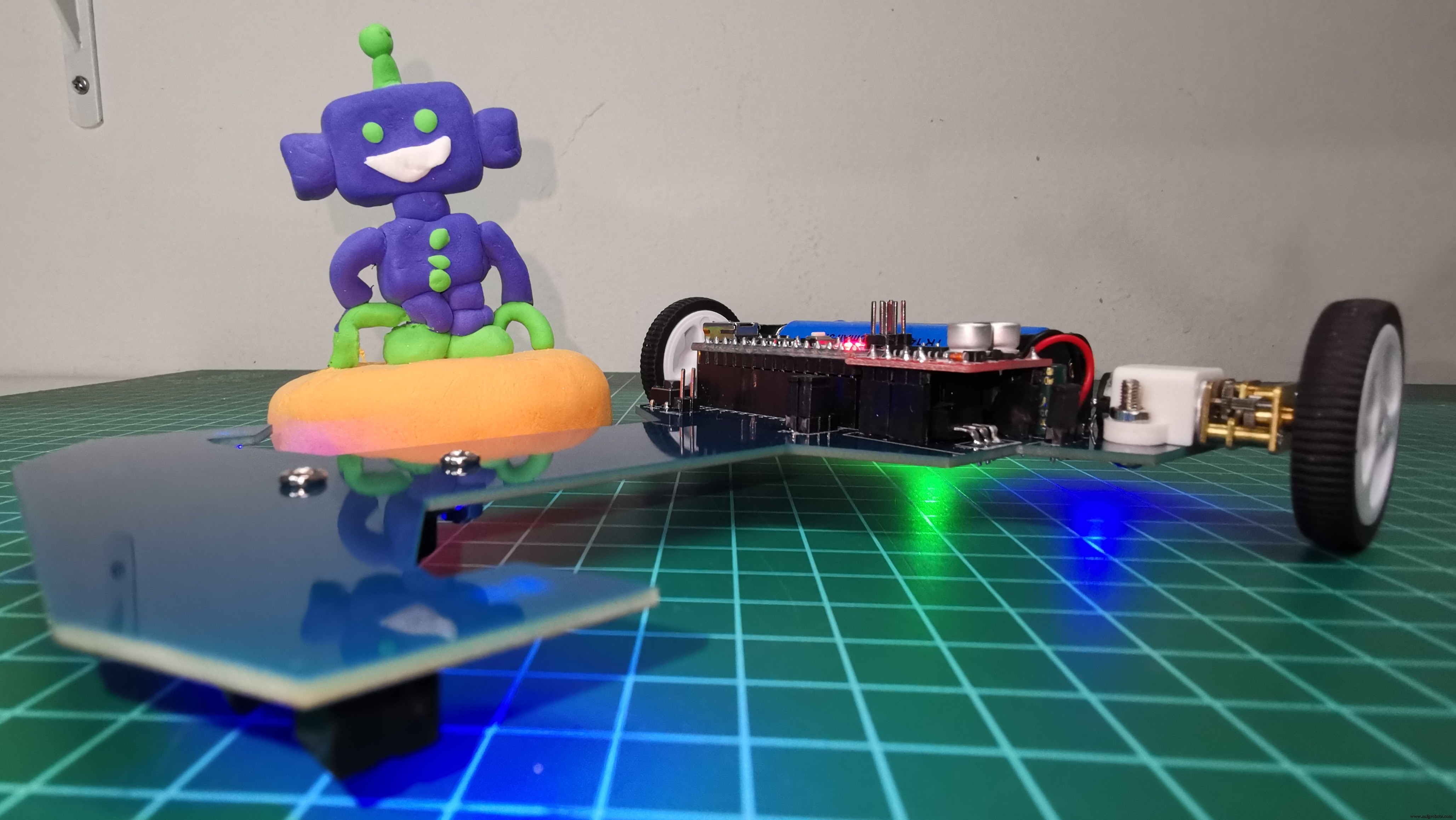
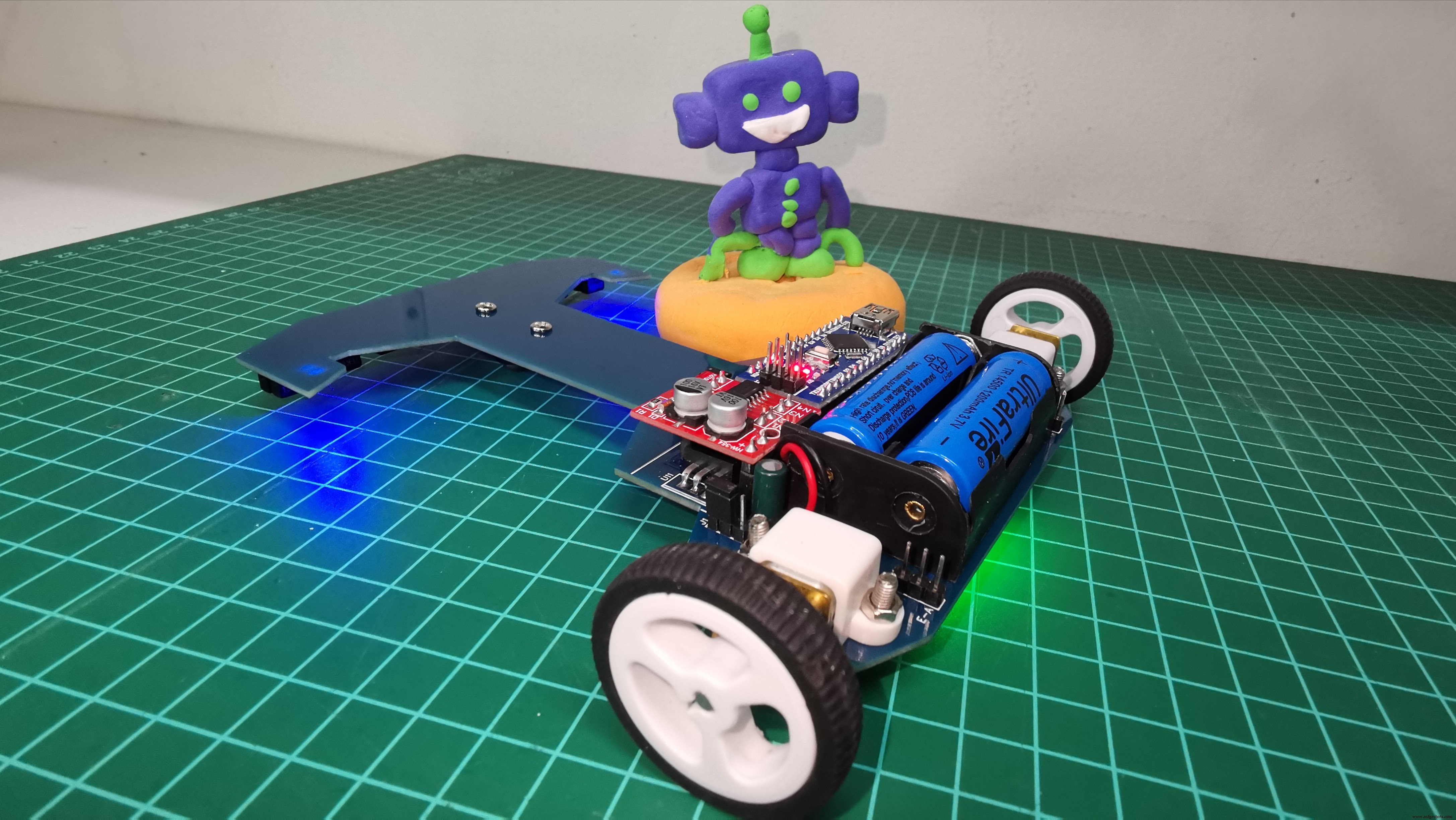
以下视频显示了原型的最终结果,其中包含了在 TinkerCAD 中设计的 3D 模型。
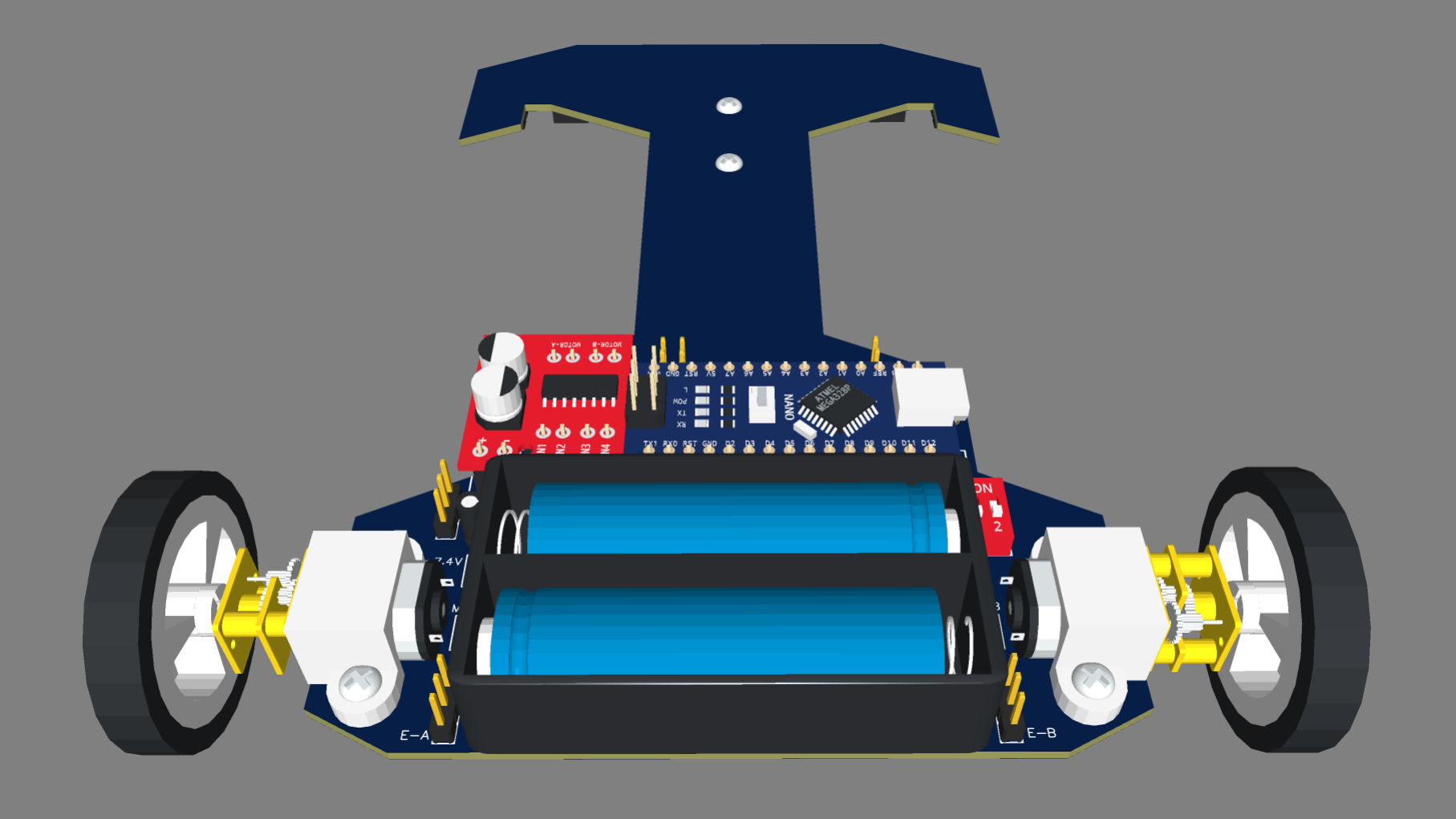
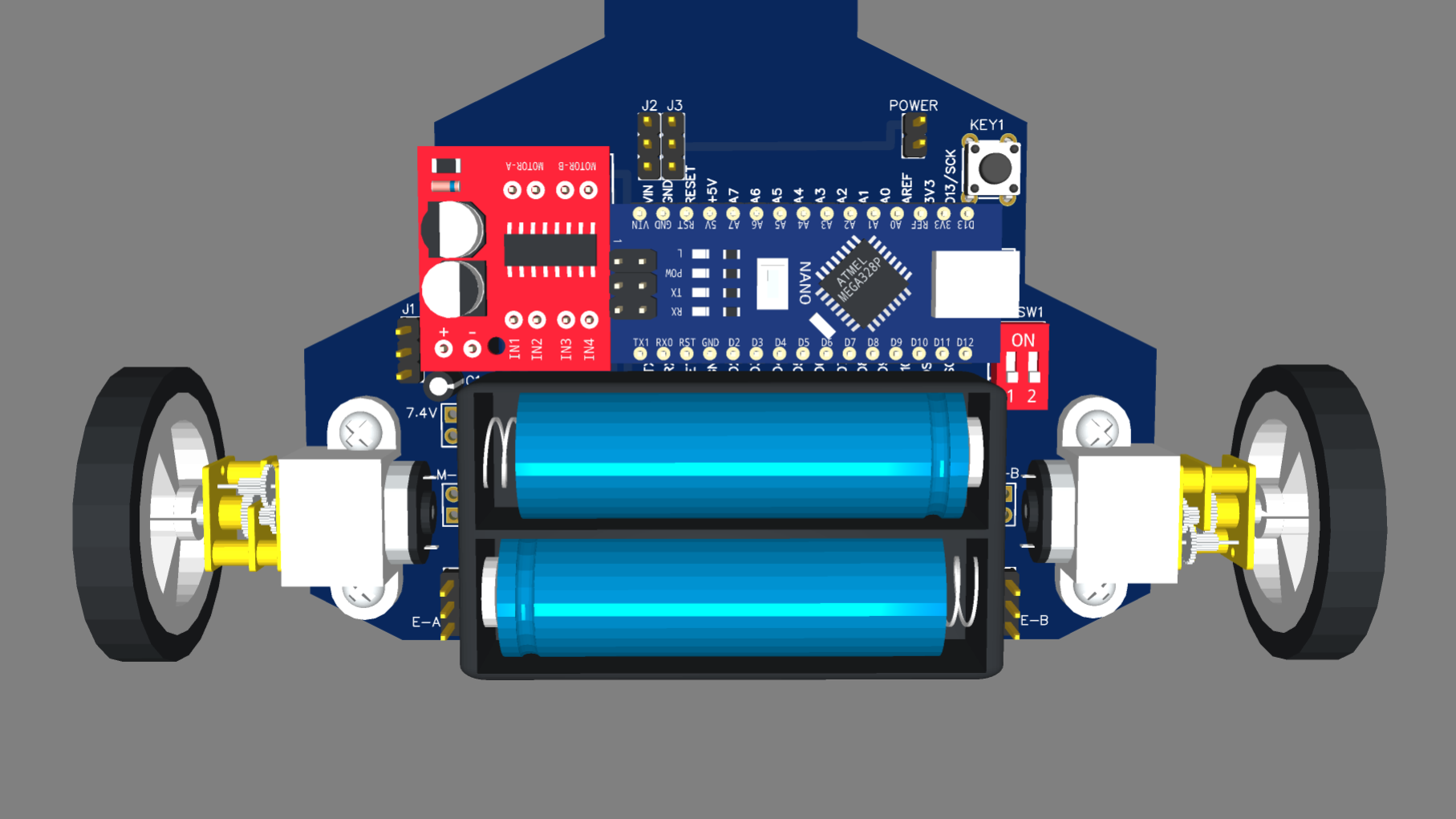
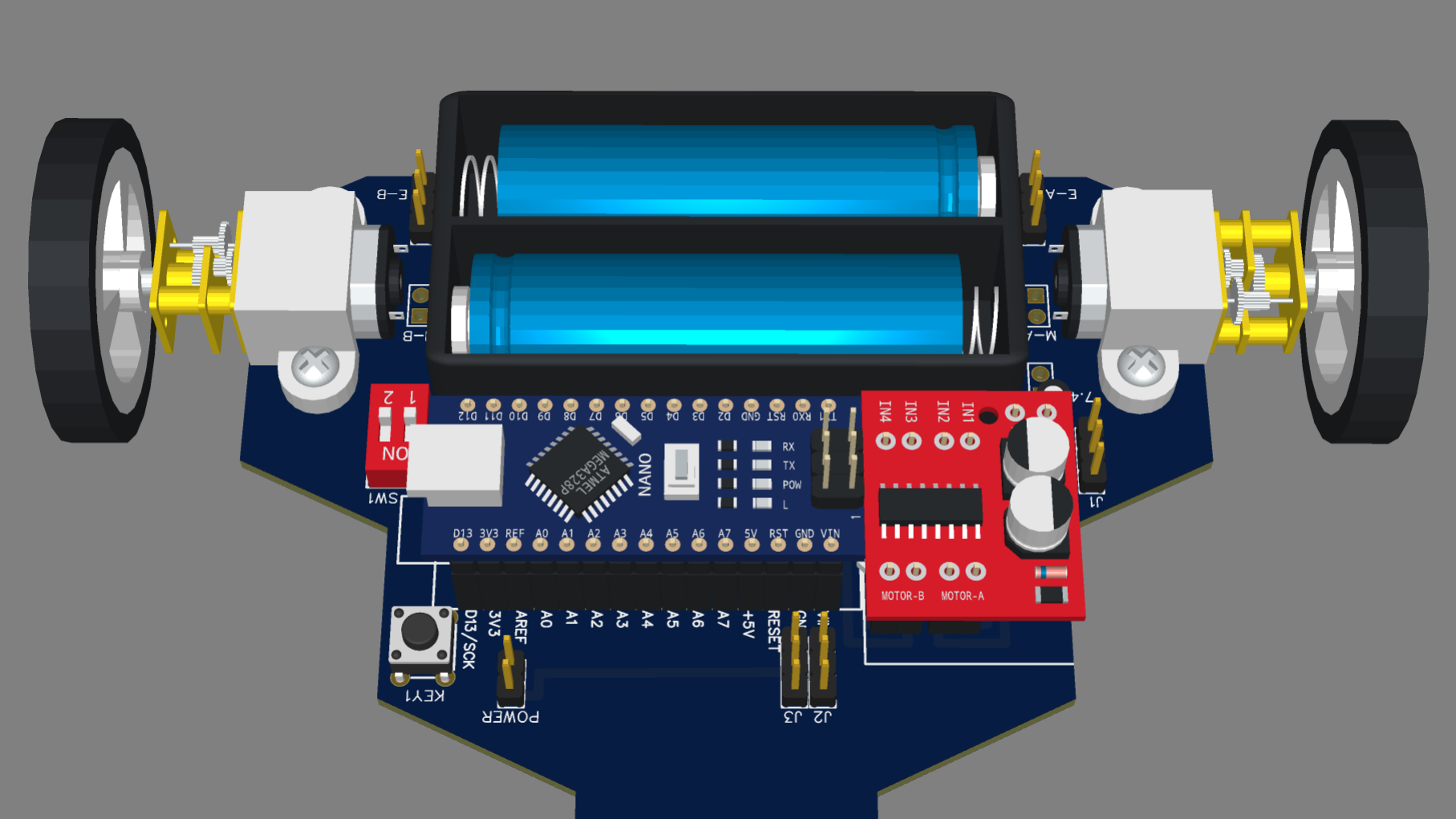
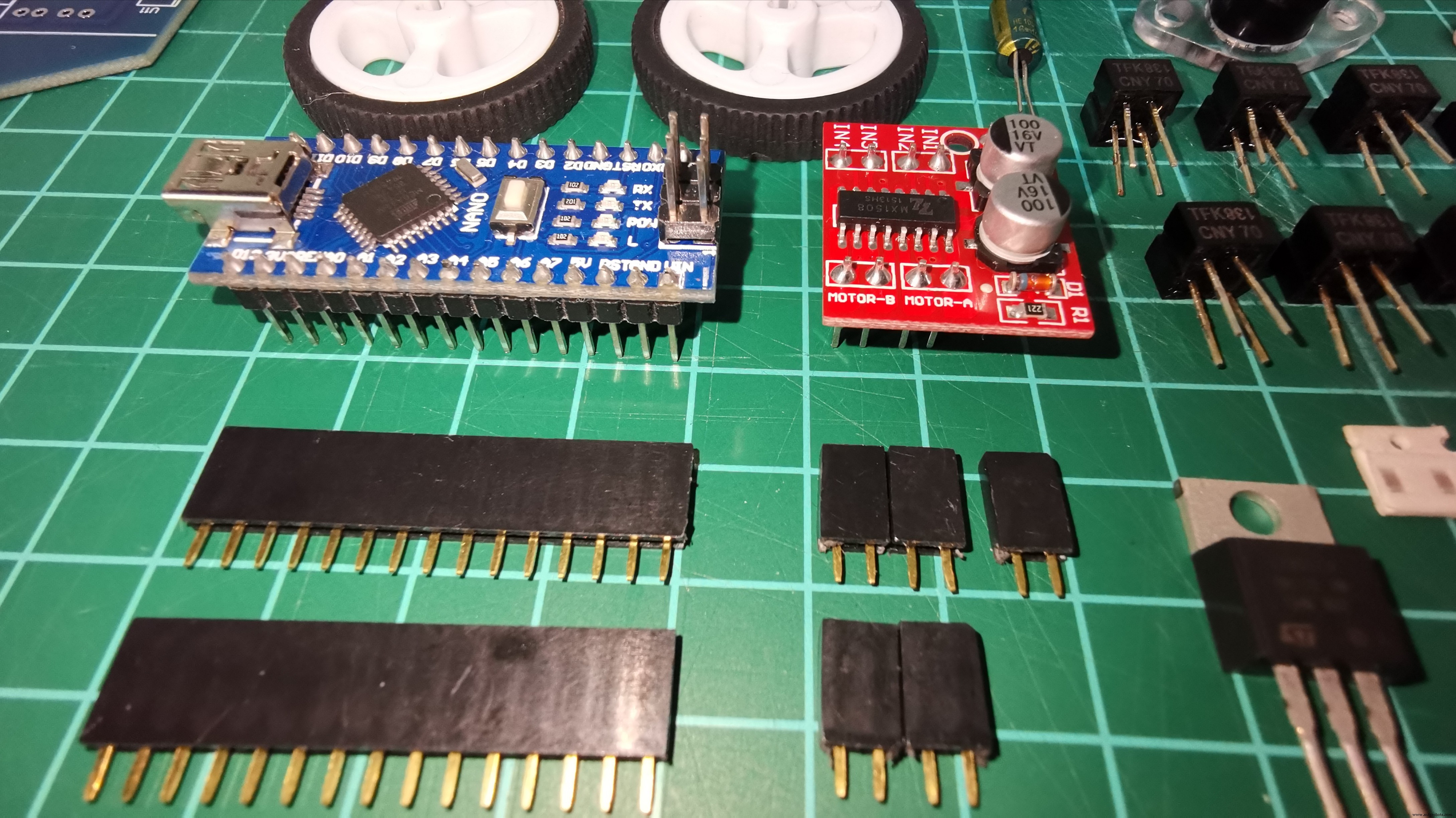
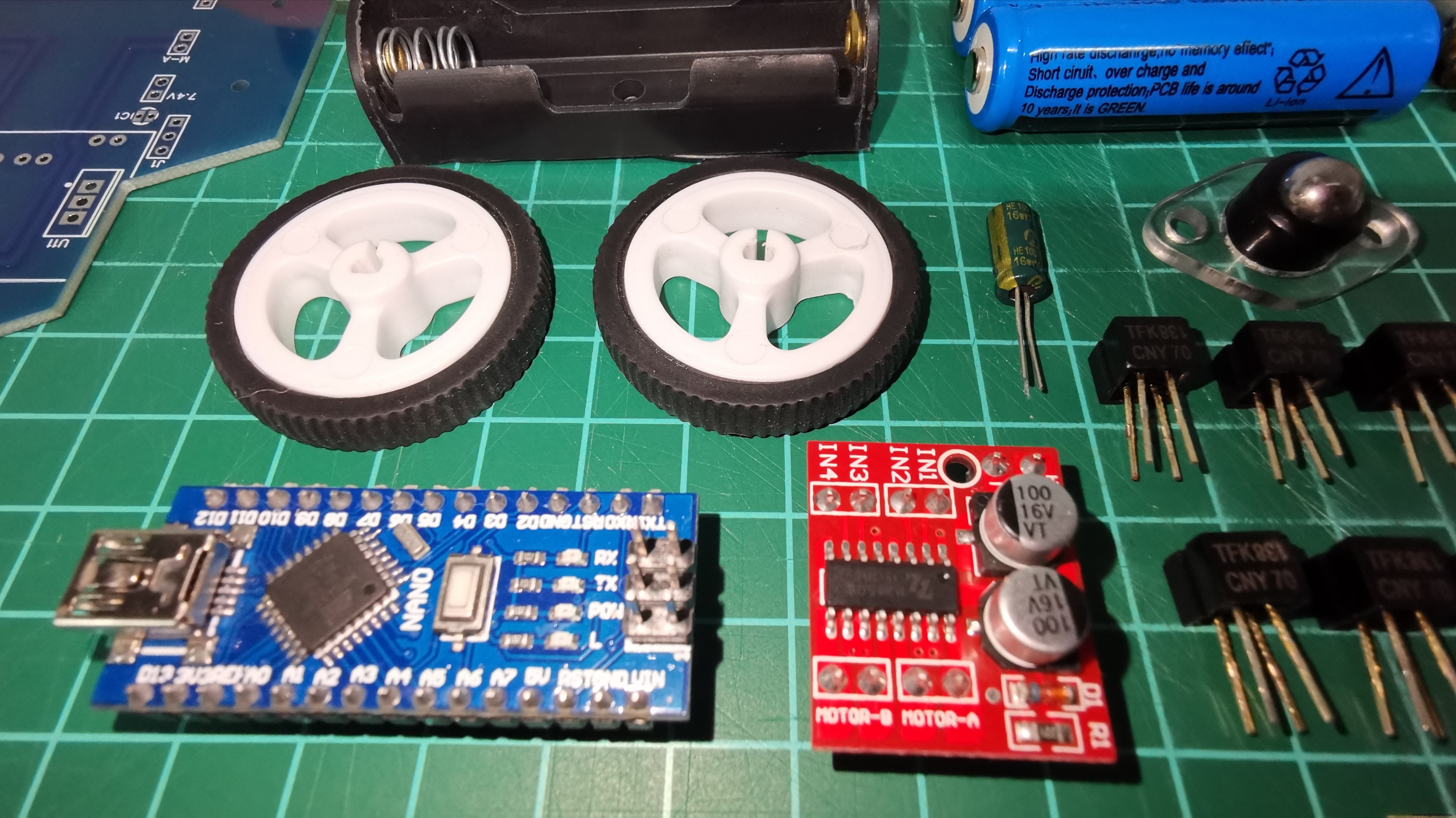
在下面的视频中,我展示了使用微型电机驱动器 (MX1508) 进行的测试。
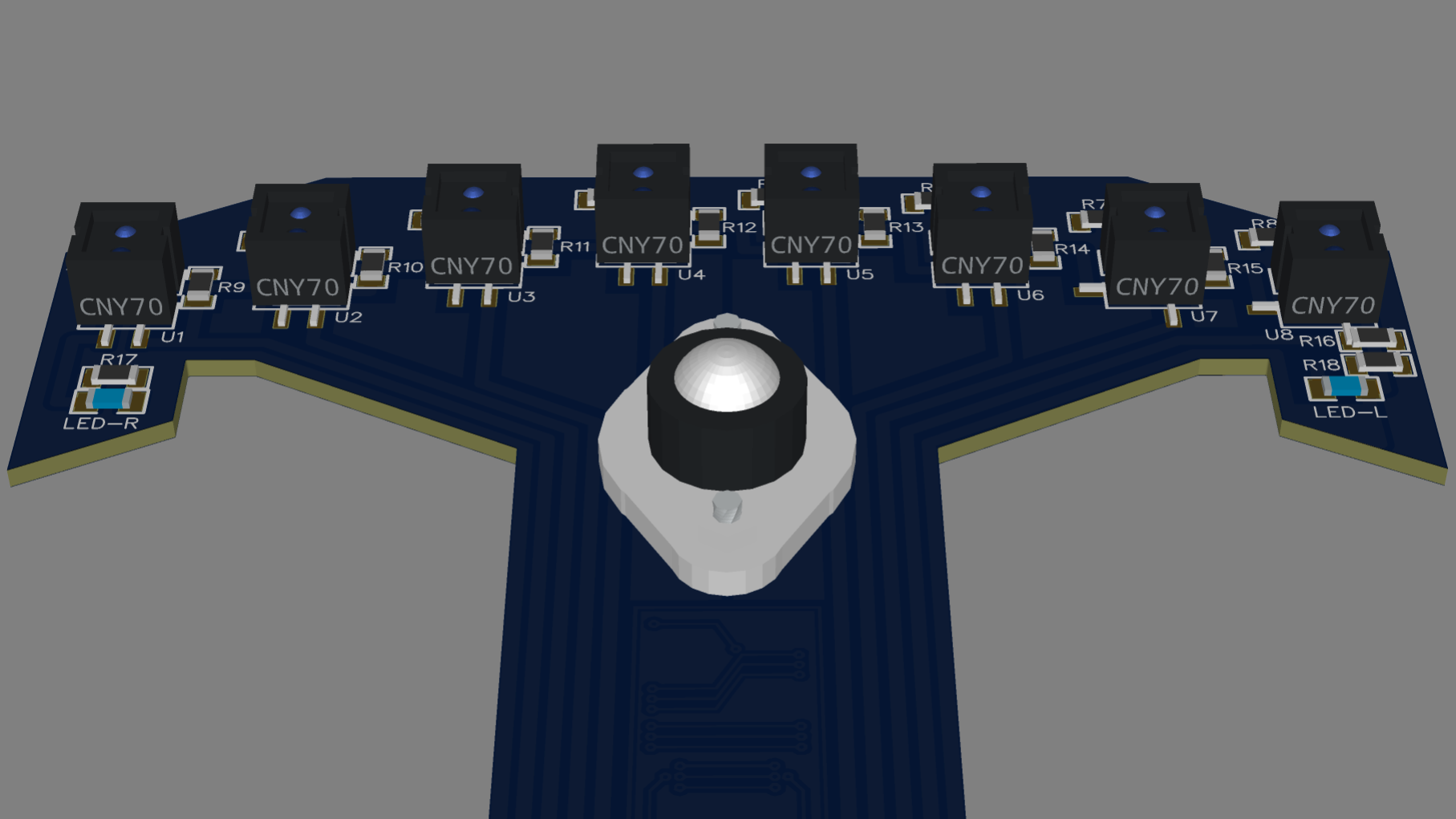
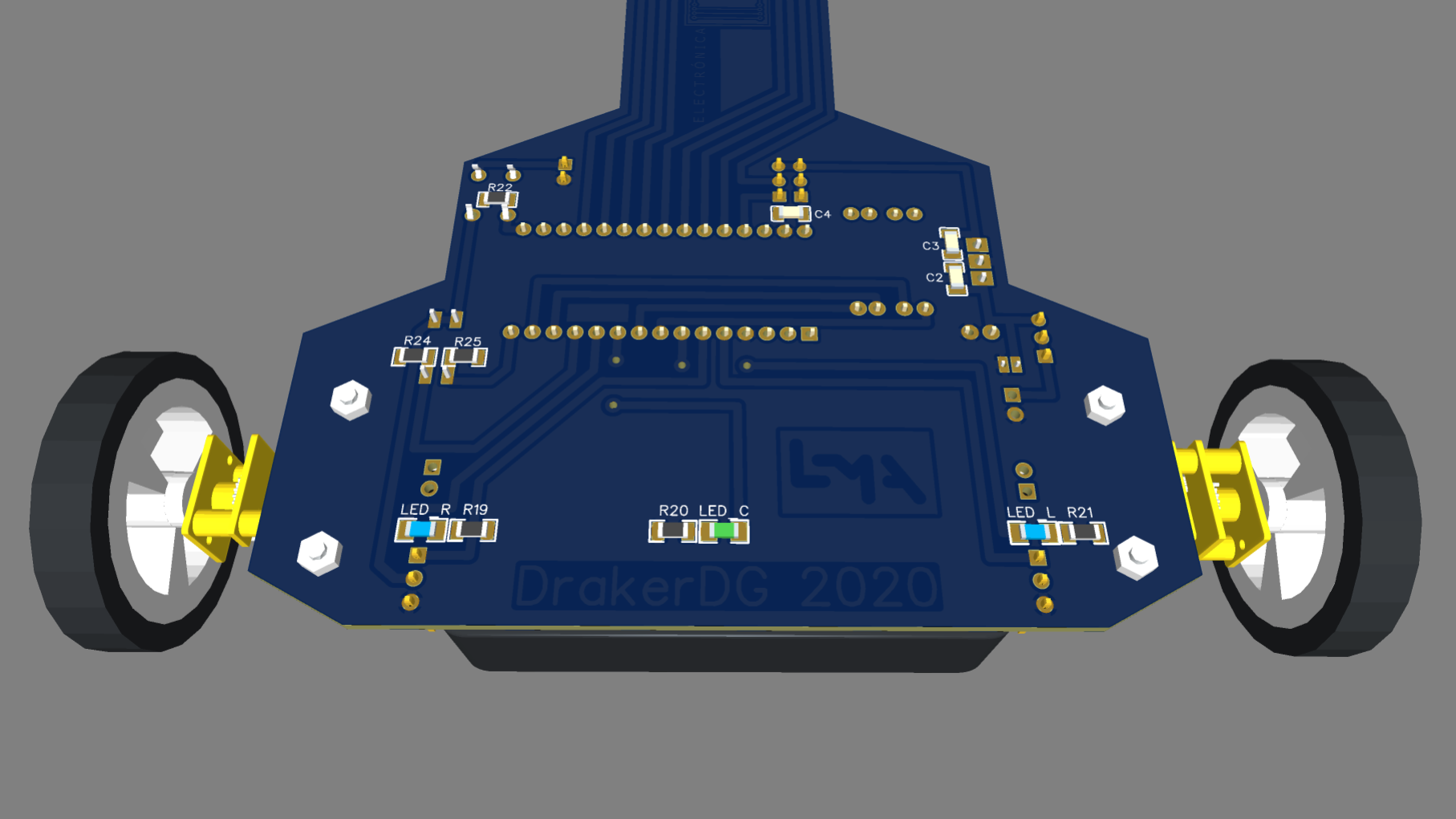
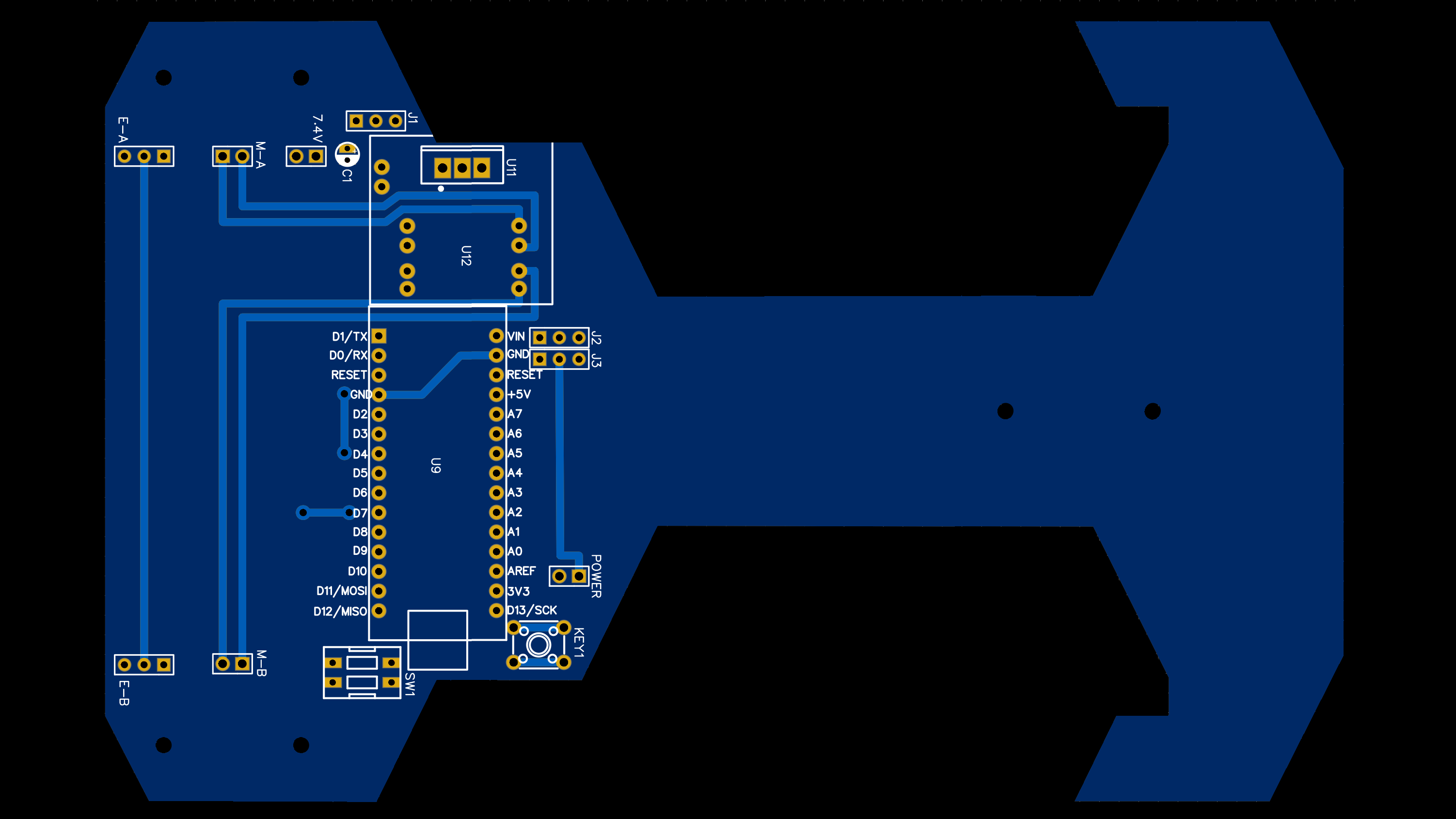
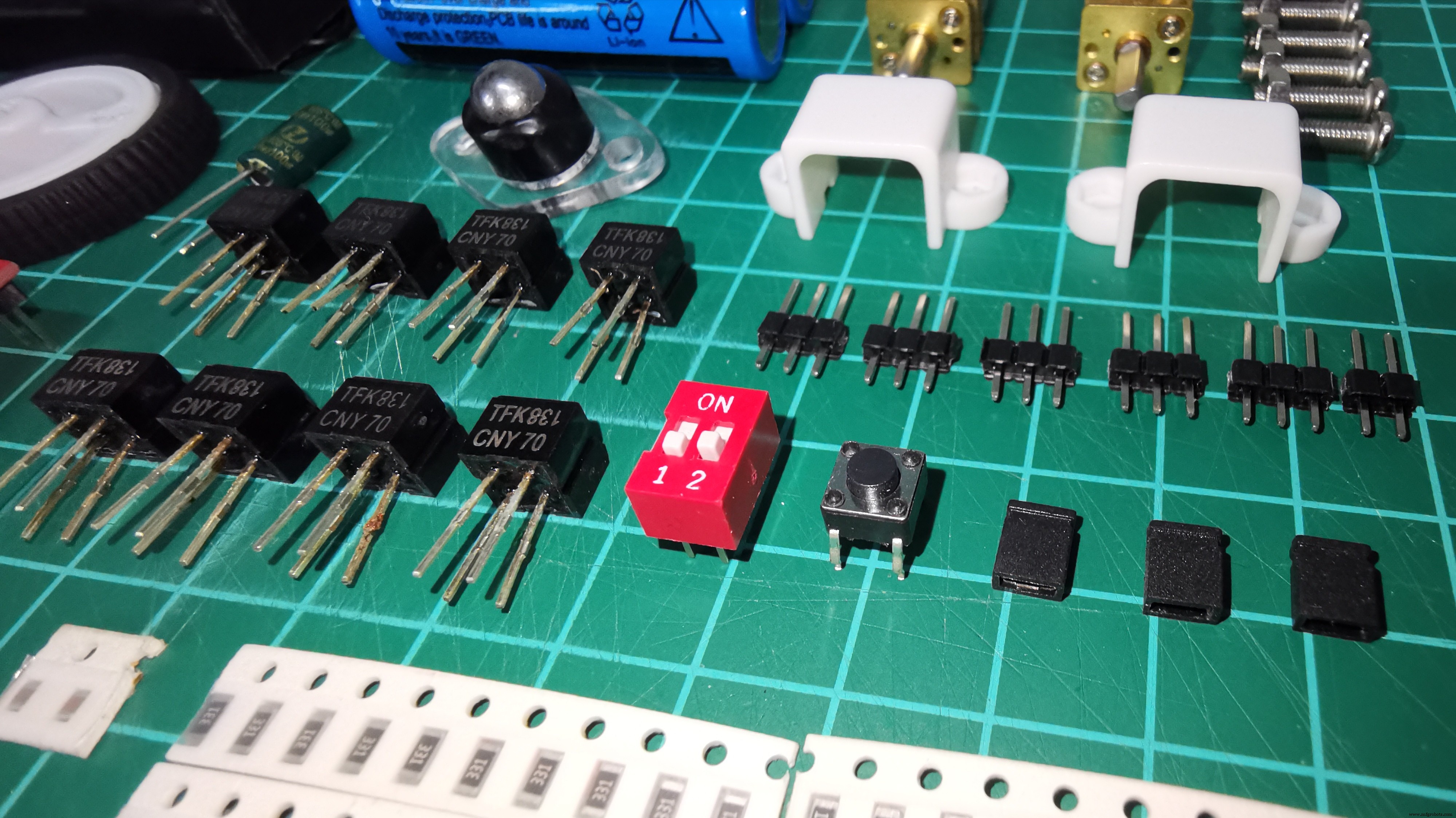
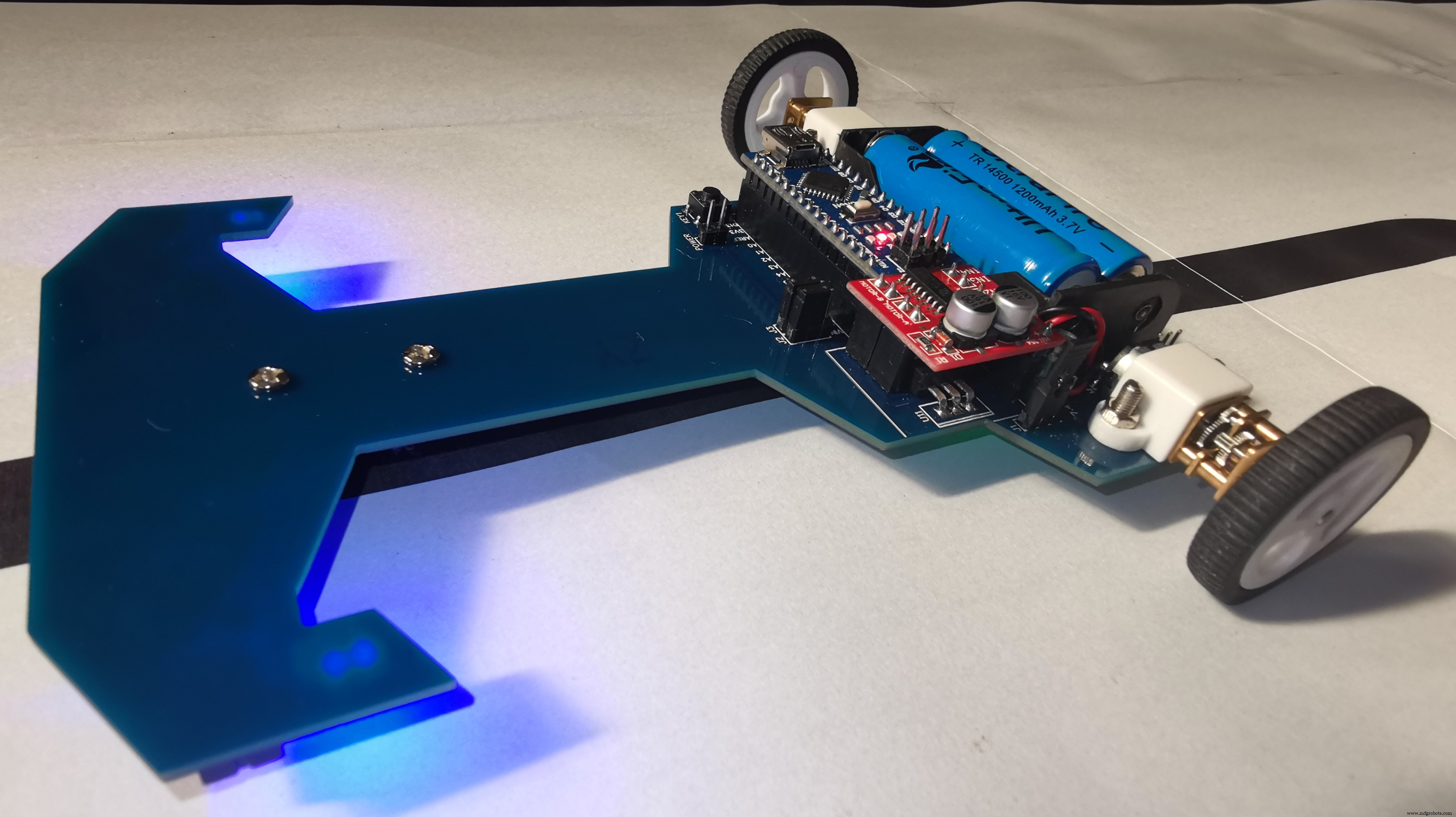
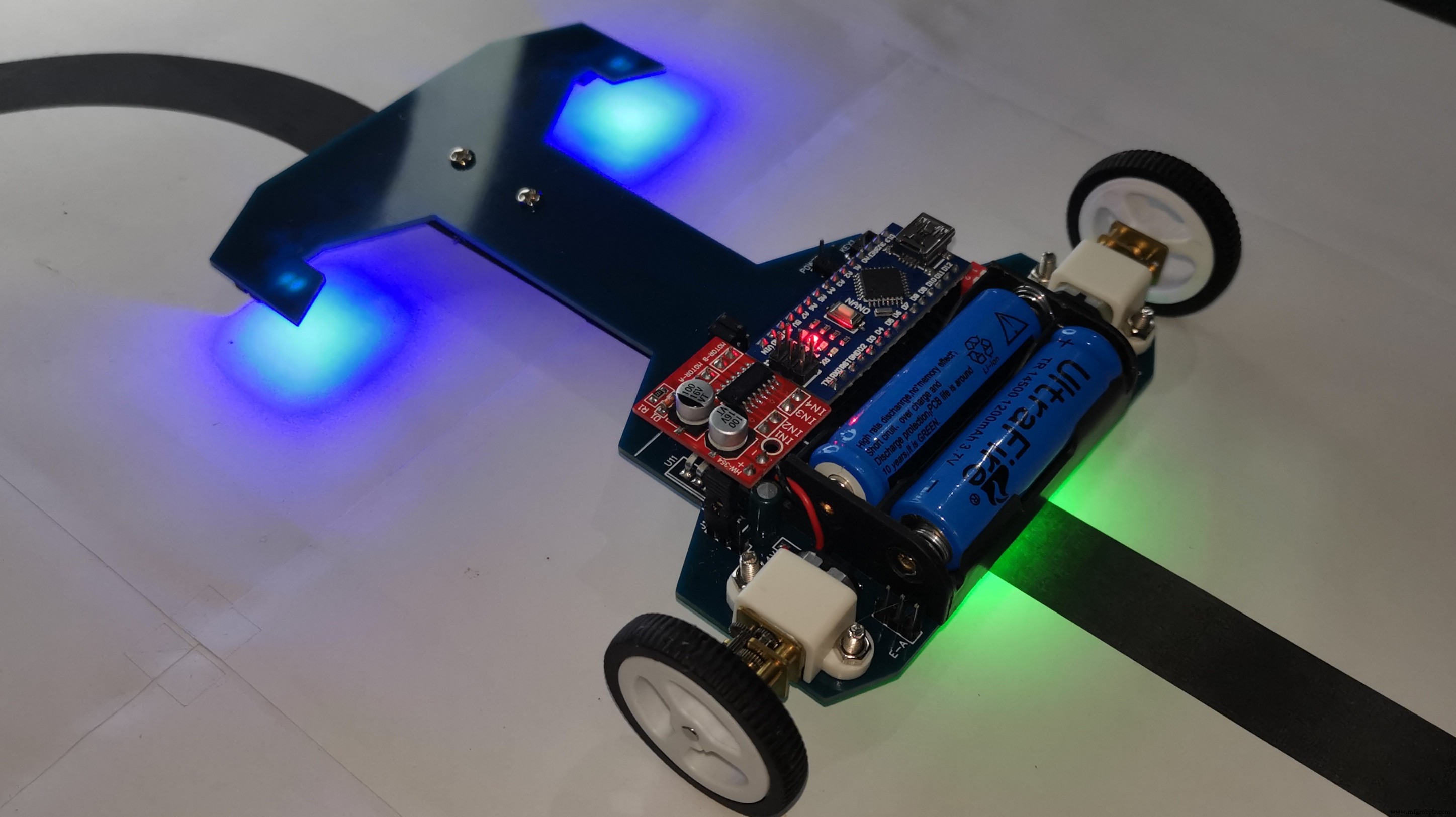
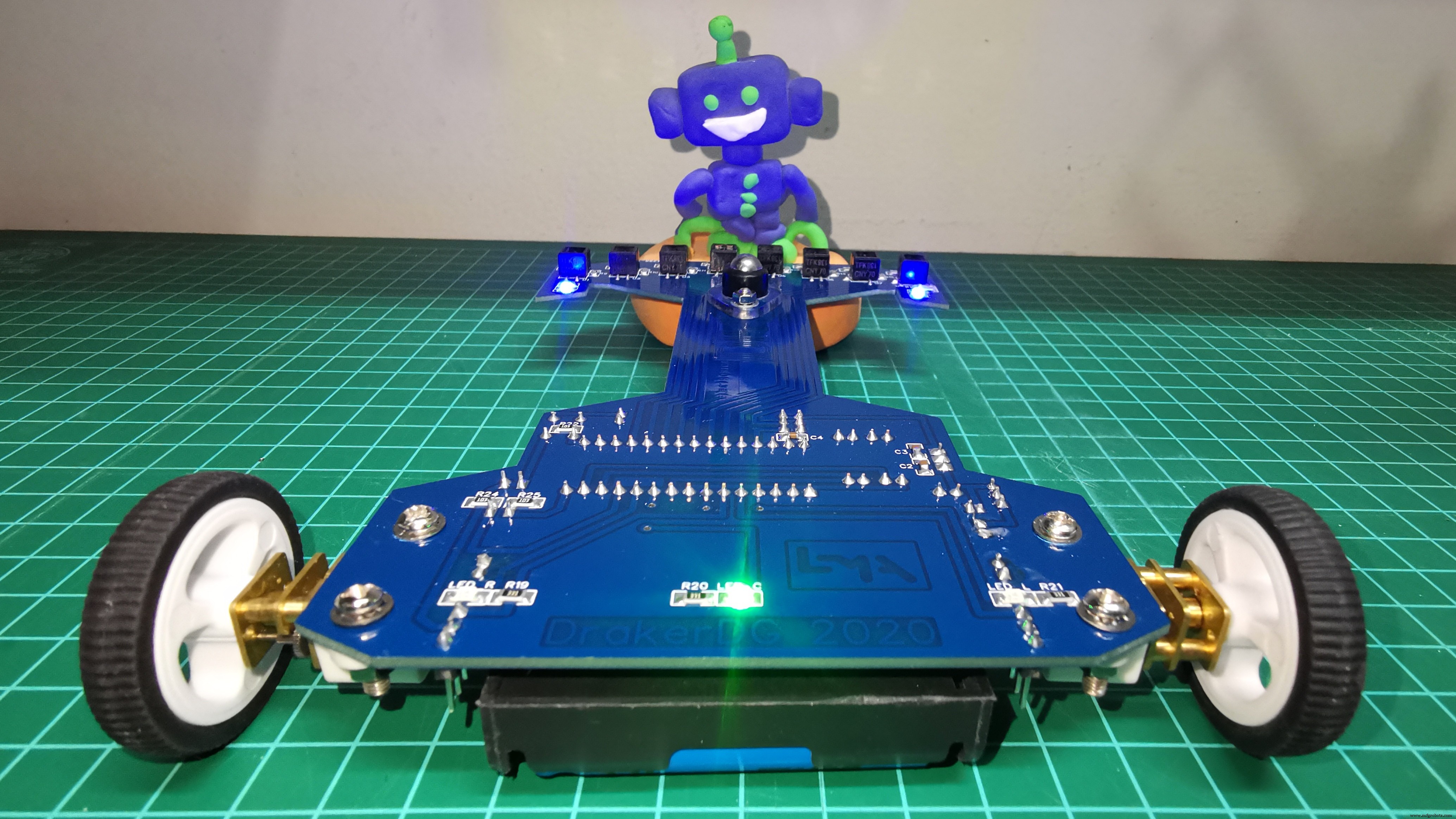
在下一个视频中,我将展示使用 8 个 CNY70 传感器进行的测试。这些传感器通过 Arduino Nano 的端口 A0 到 A7 进行模拟测量。我使用初始算法通过标准化 0 到 1000 的范围来校准传感器,其中 0 代表白色背景,1000 代表黑线。校准完成后,进入循环,开始读取循环,计算0到7000的位置,分别代表左传感器到右传感器。该位置值用于计算比例误差P。P的范围是-3500(左)到3500(右),0为中心值。该算法会记住最后检测到黑线的传感器(左或右)的位置值,目的是将此数据用于制动动作和线恢复。
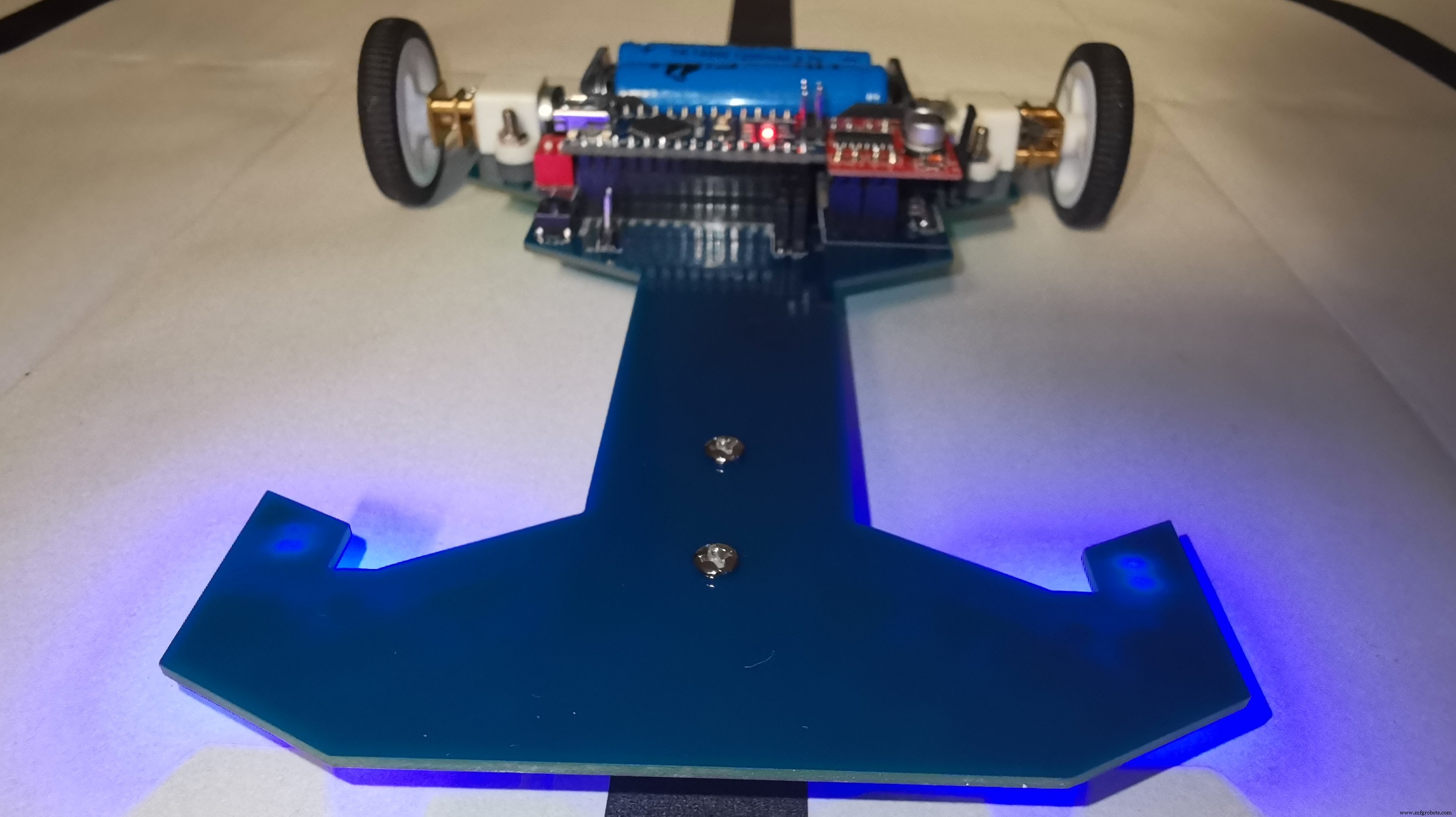
电路安装 95% 的最终测试显示在以下视频中。最后一次电流测试最大消耗200mA。
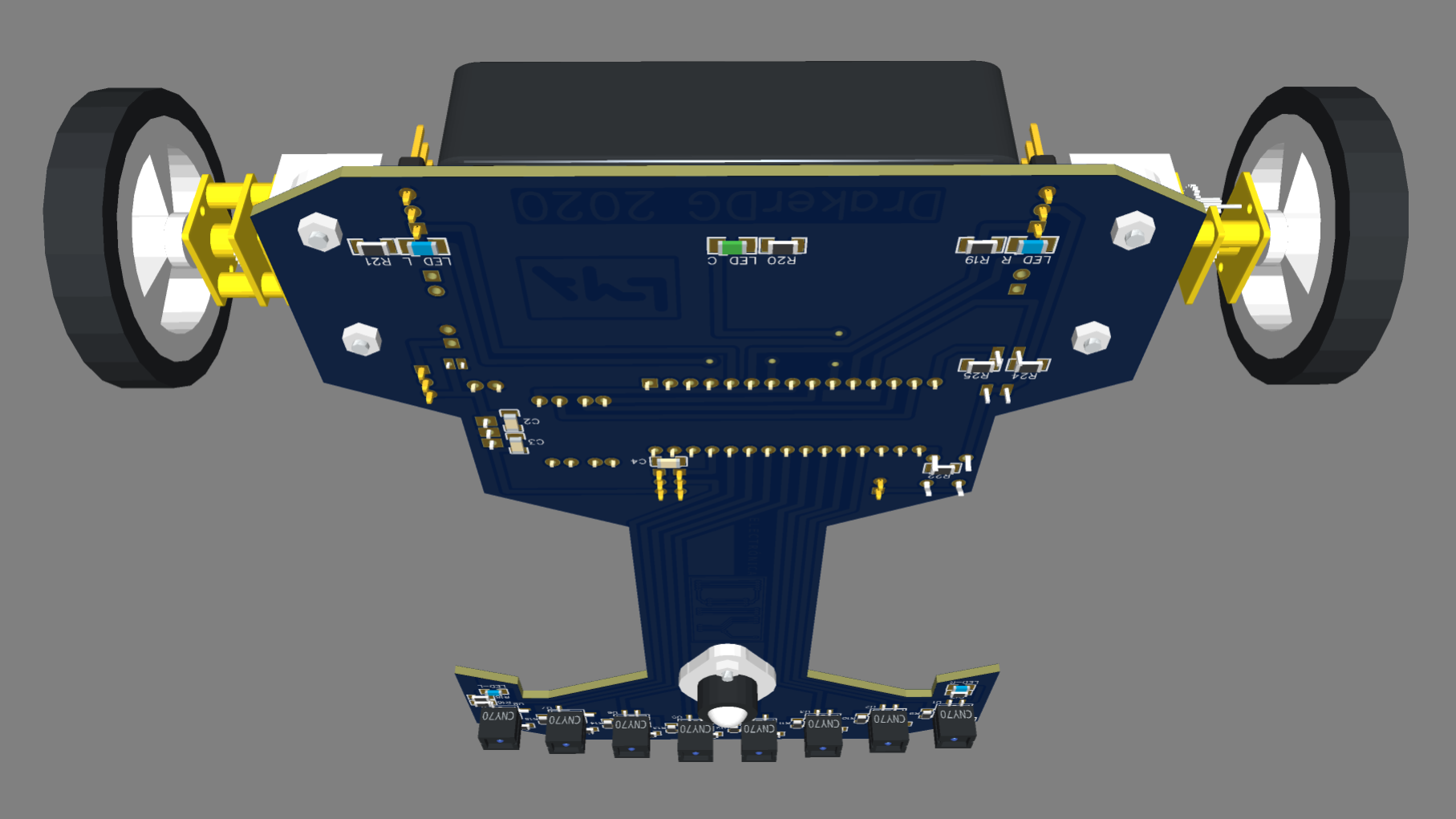
这是机器人印刷电路的最新版本,准备在JLCPCB上制造。
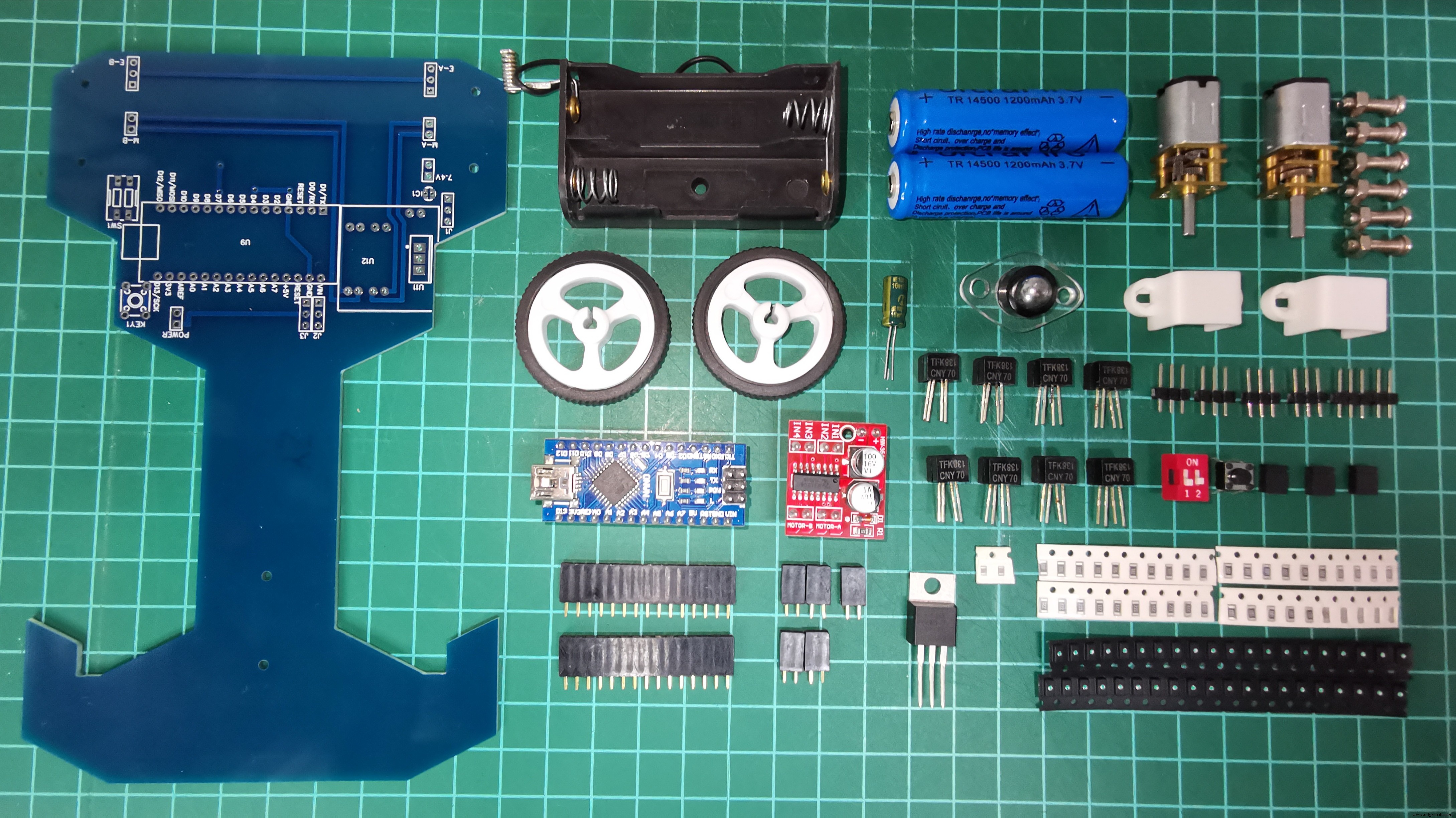
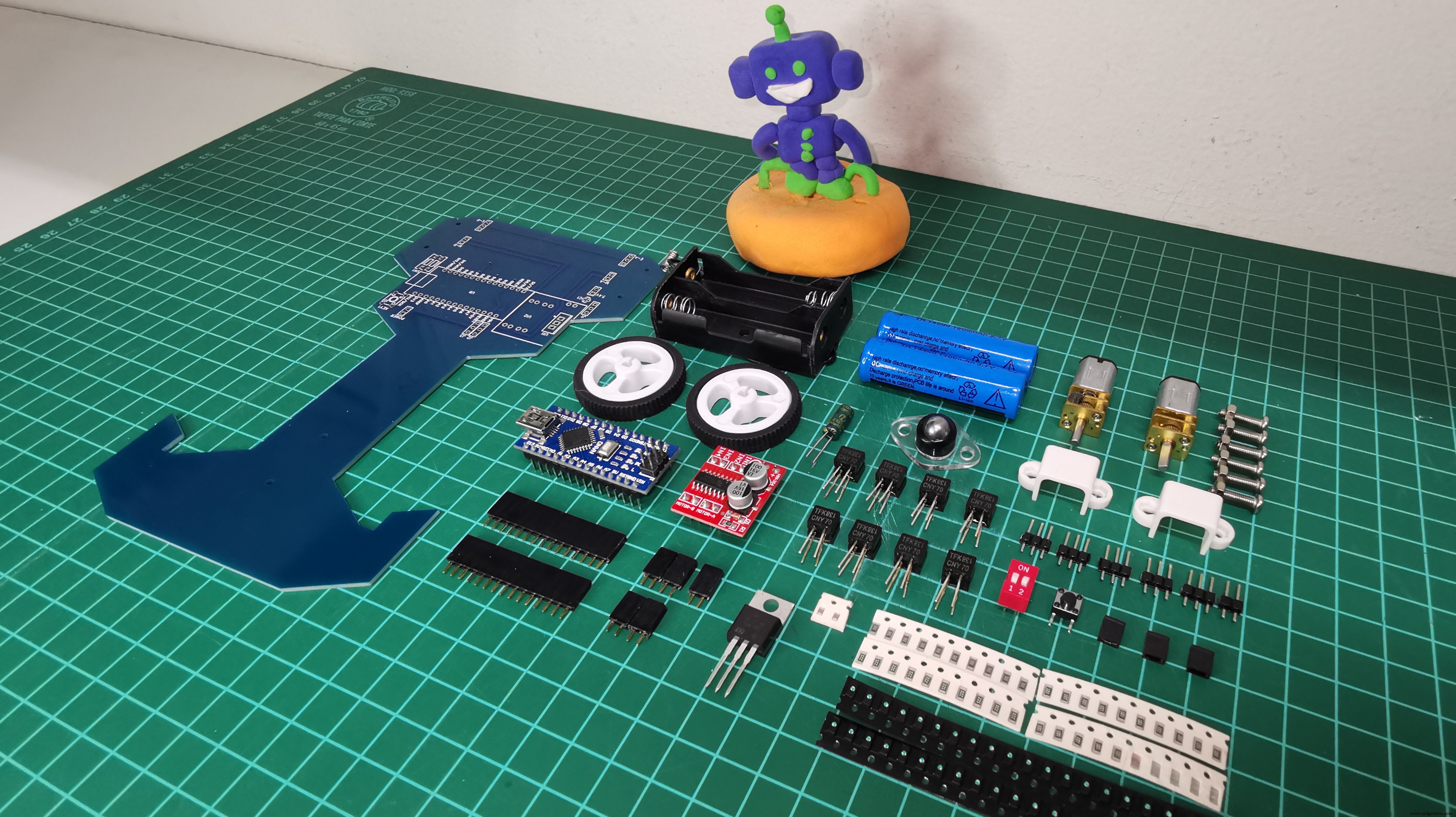
这是开箱。
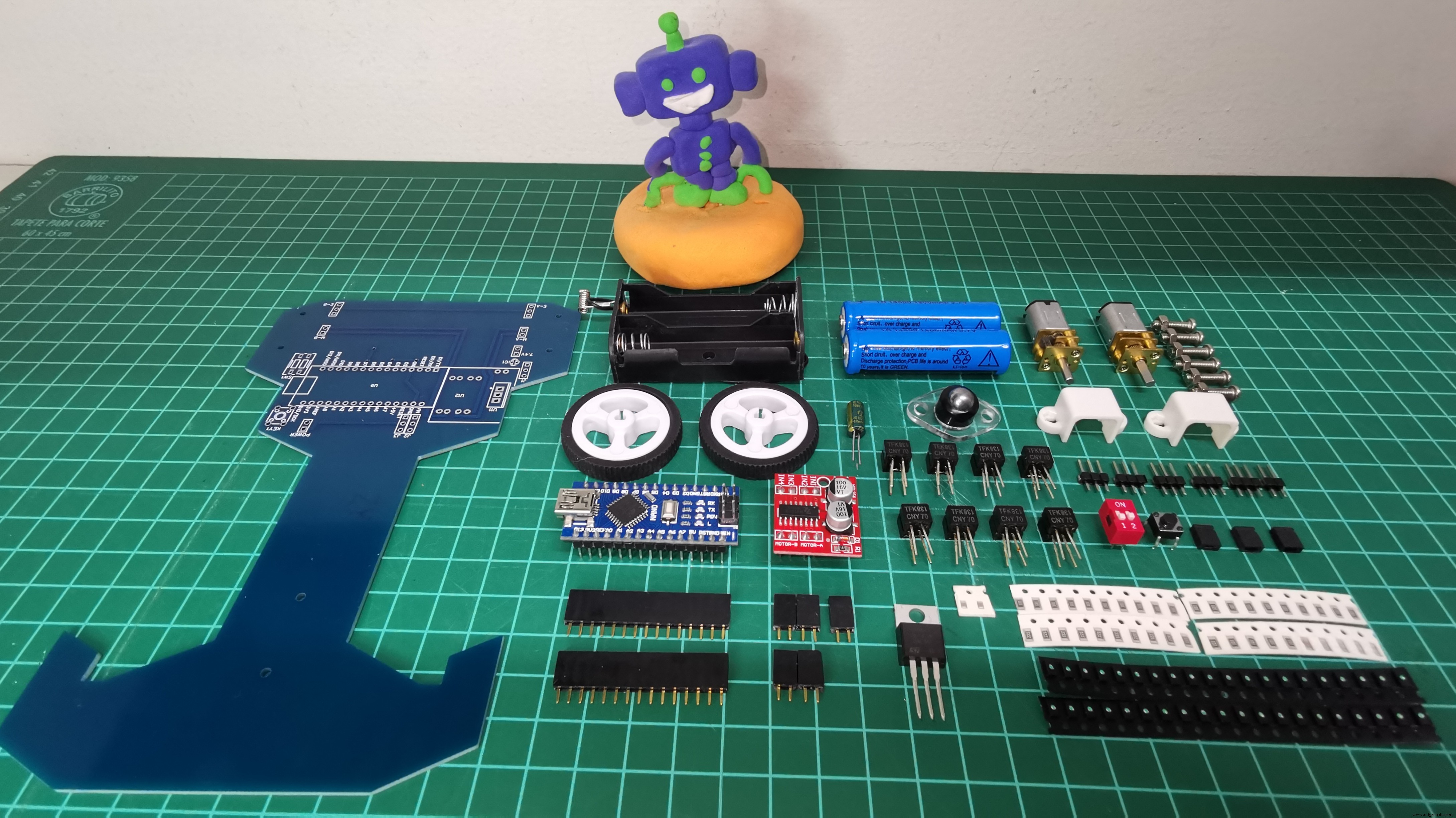

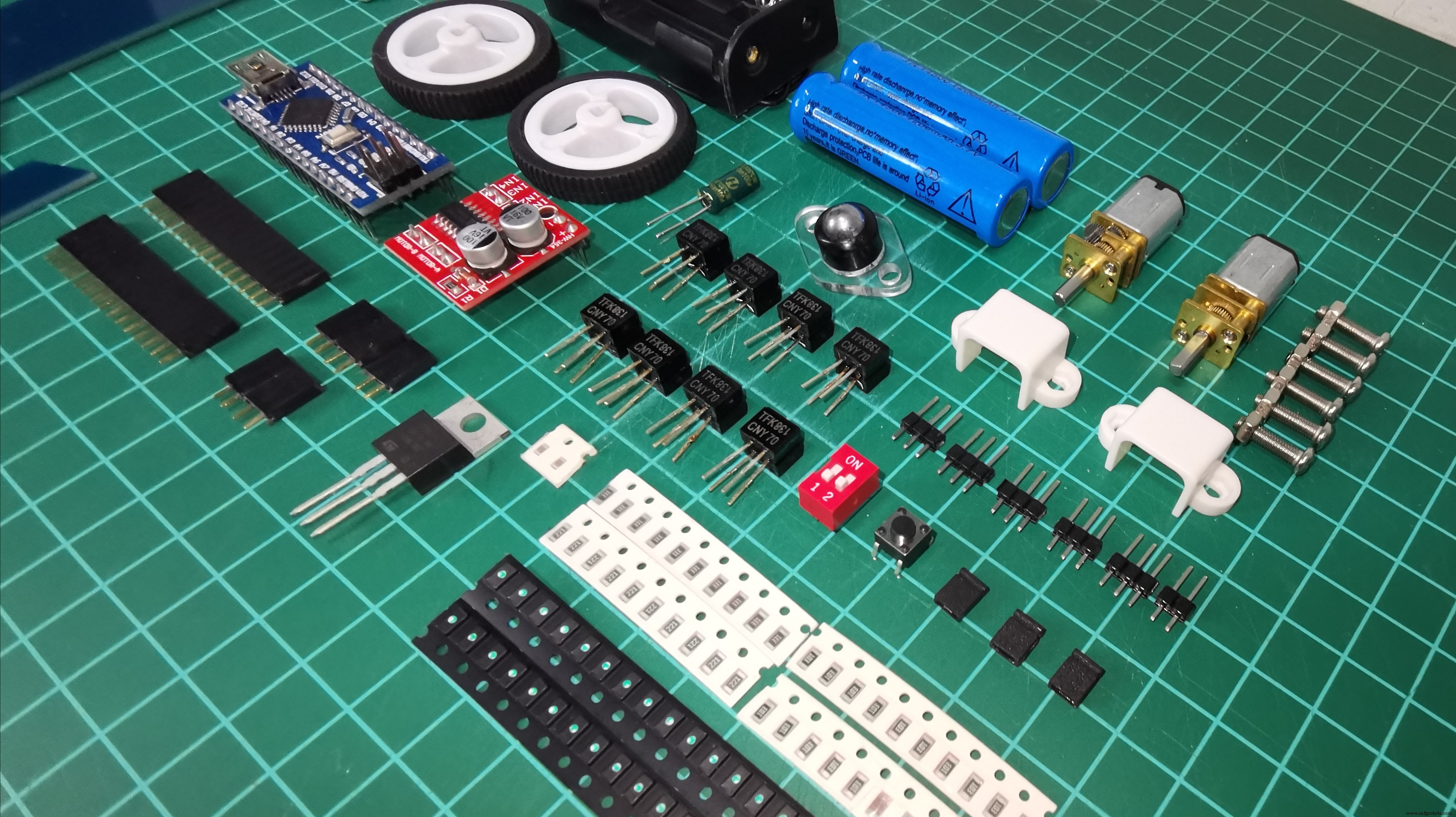
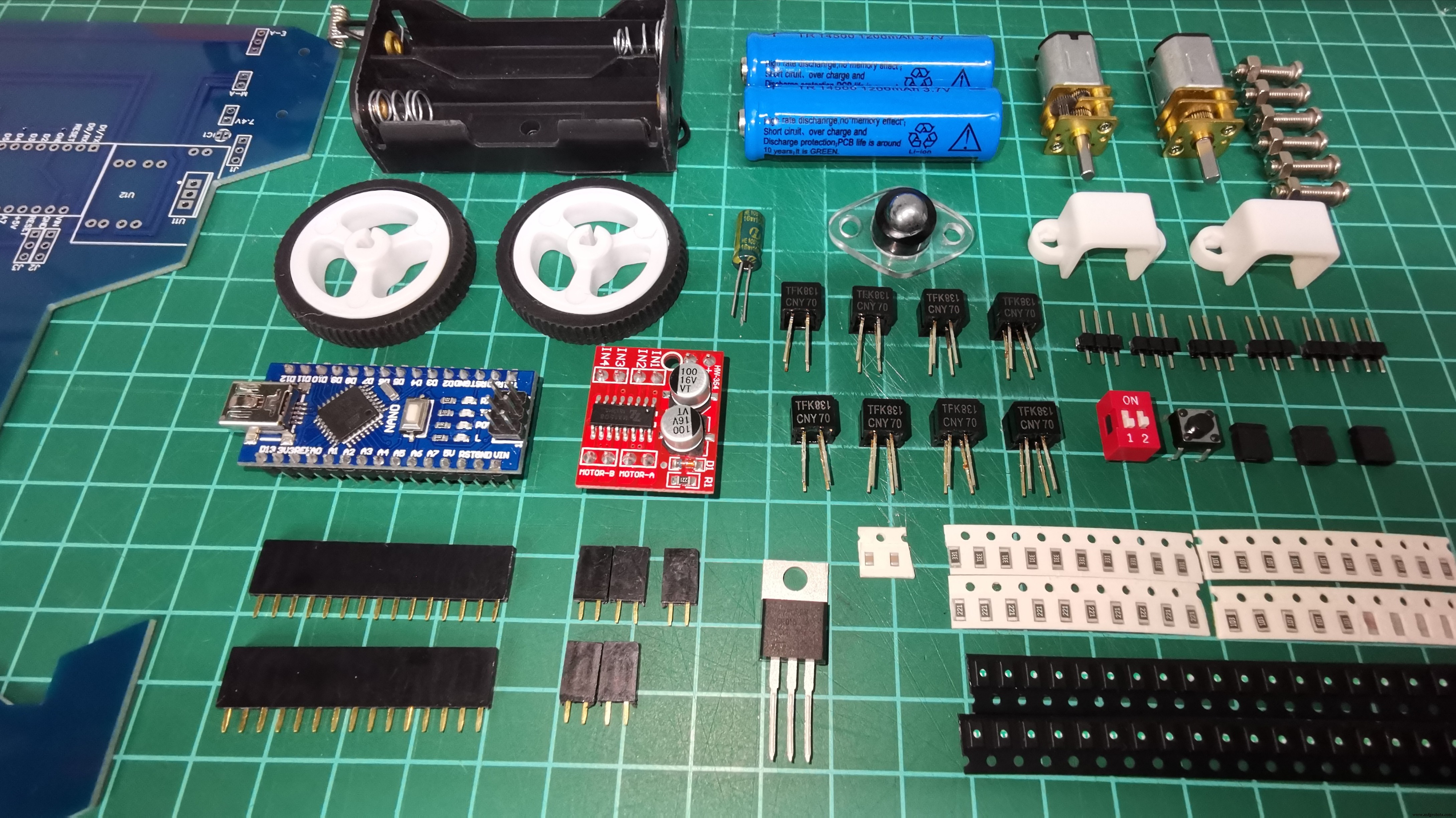

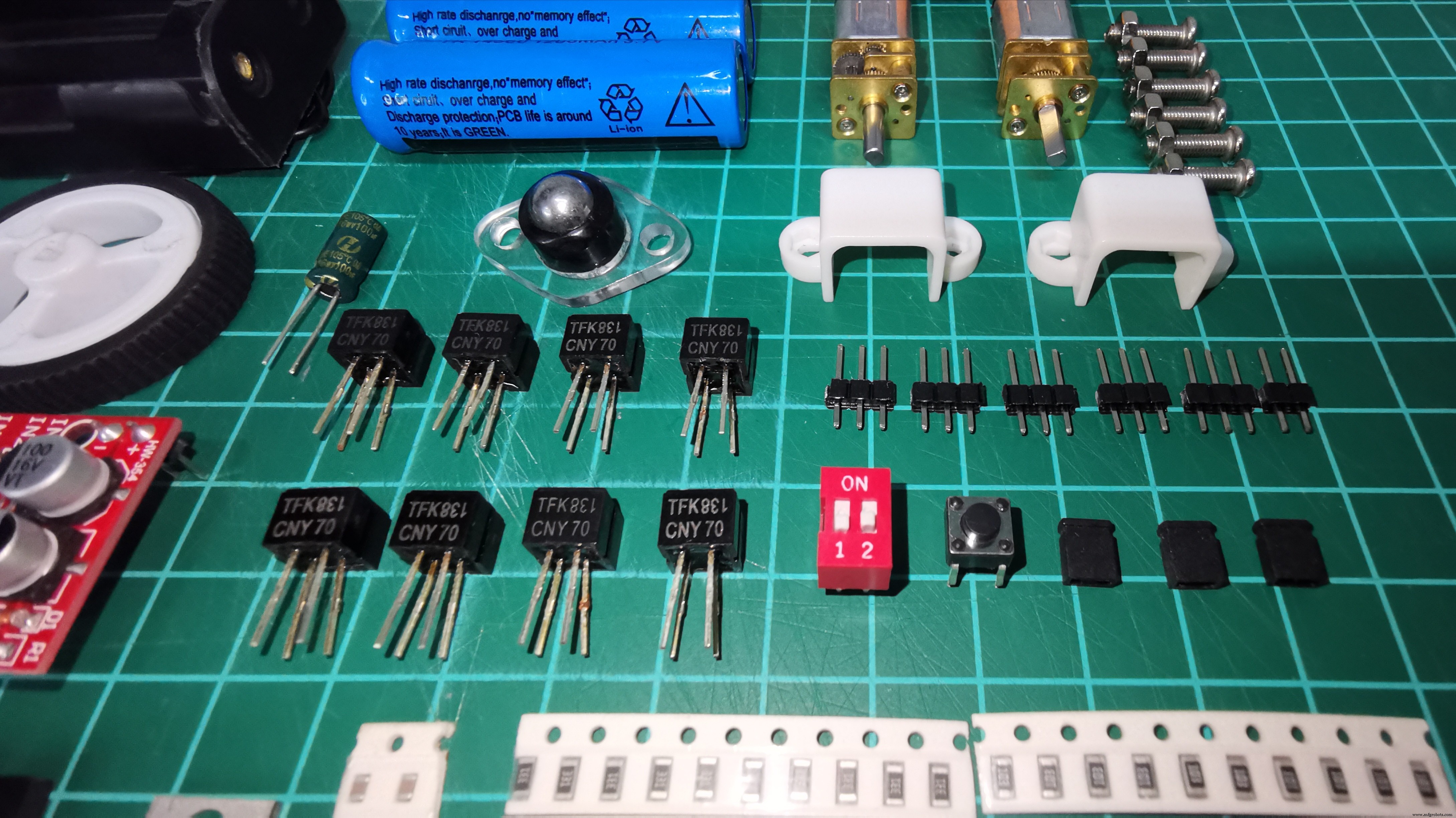


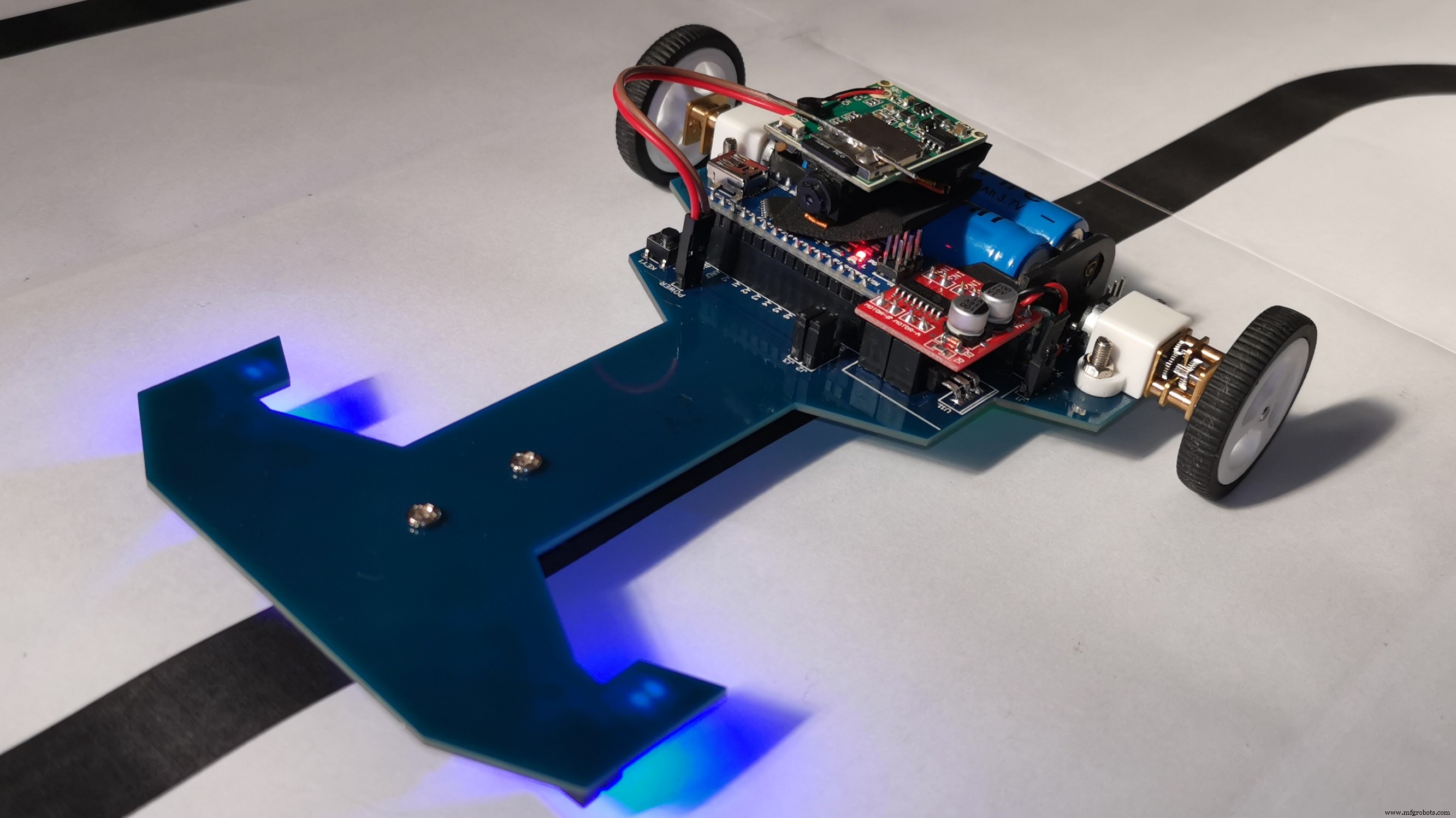
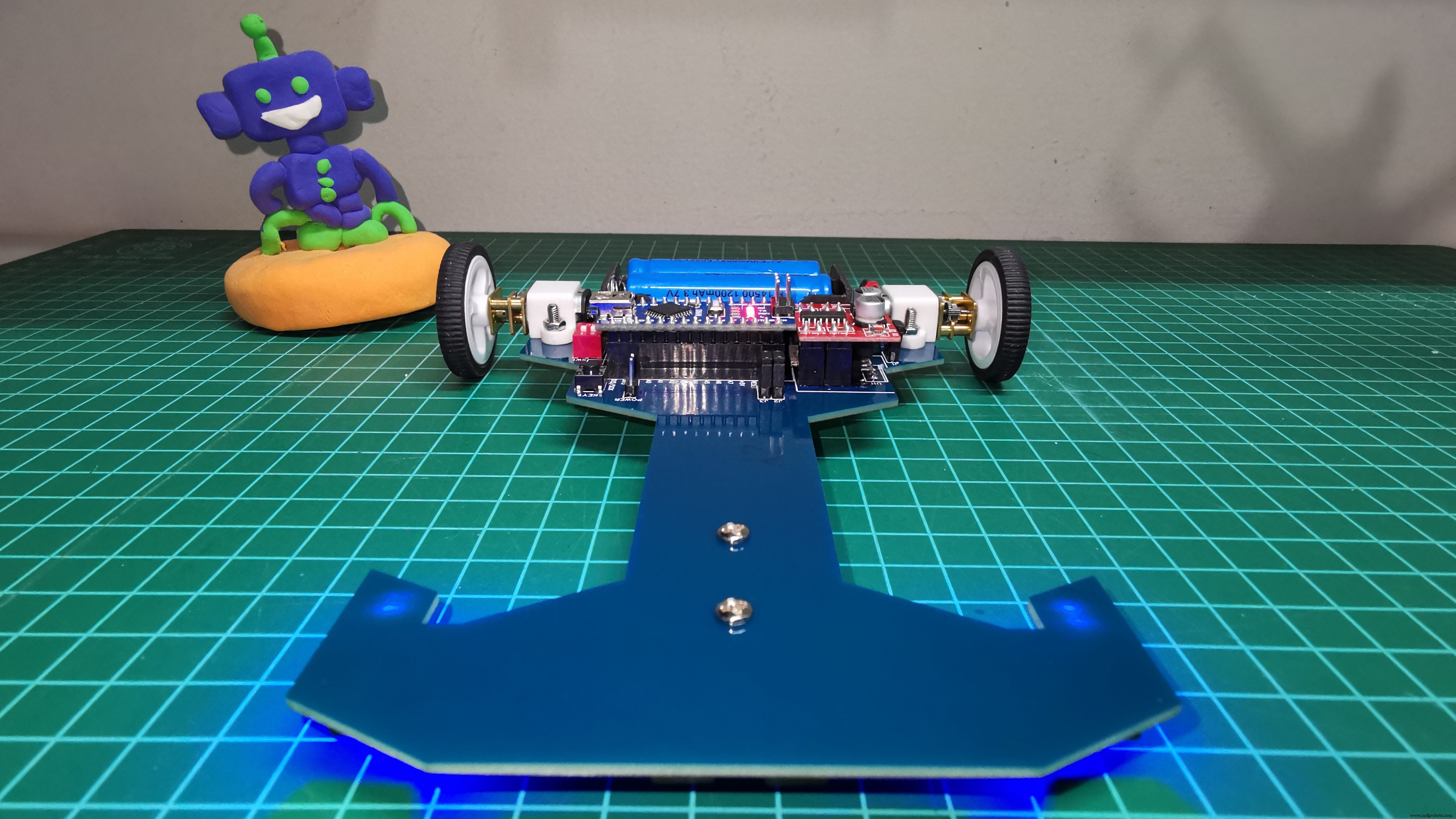
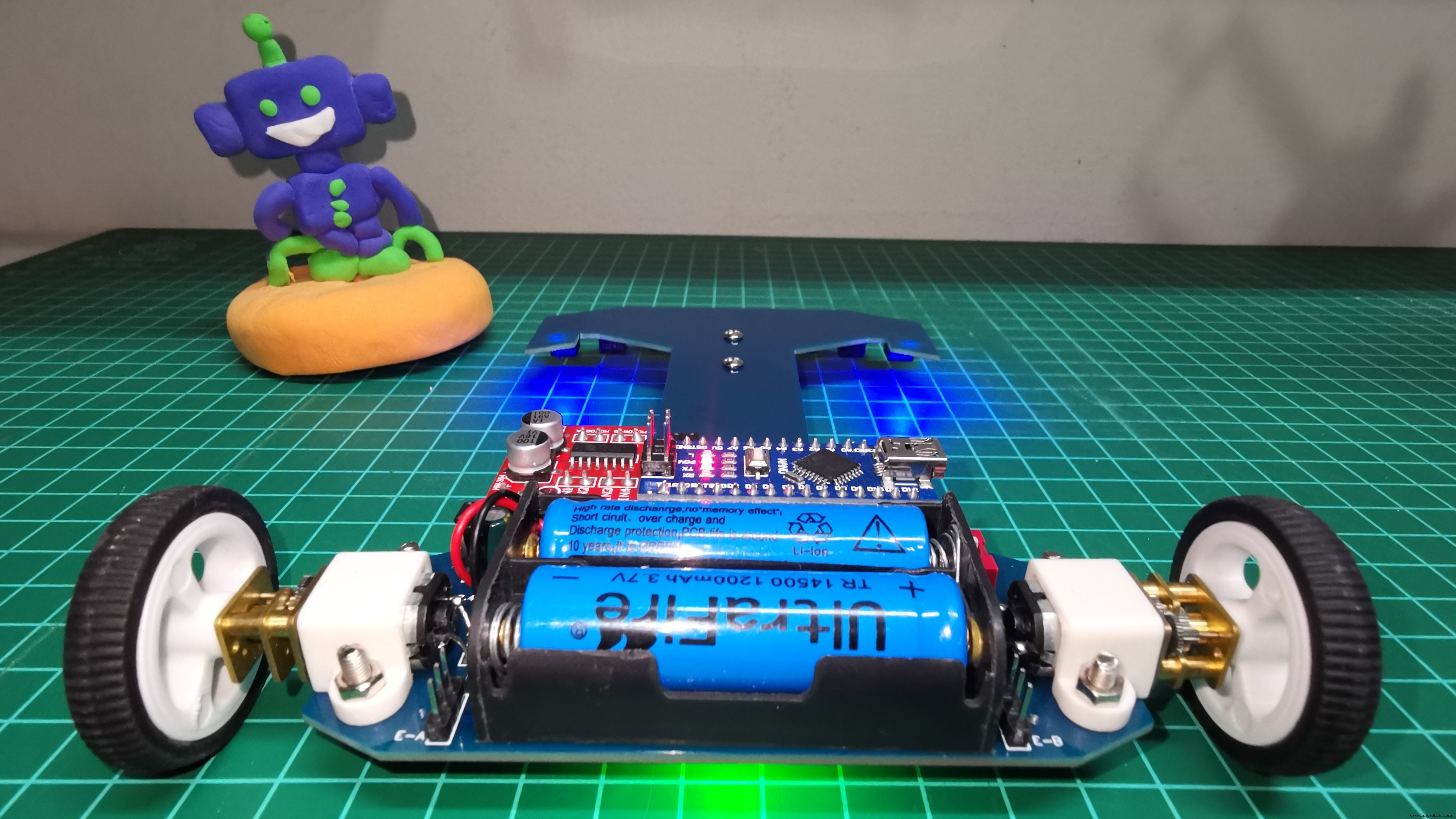
在最后一段,并且已经有了全部的零件,我展示了我的第一个速度跟随机器人的组装。
最后,经过大量的努力,我已经有了完整的原型,我在下面展示了如何加载代码(代码加载模式),如何测试传感器,当然还有在赛道上的测试。对操作很满意,测试代码很好的控制了代码。我使用了 PID(完整)算法来平滑校正并重新获得线路的路线。由于一切都可以改进,我会继续玩代码以实现更高效的版本。


作为补充,我在 Webots 应用程序中对这个机器人进行了模拟。它仍在改进过程中,但我分享了这个视频,以便您可以了解一种执行机械和逻辑测试(代码)的方法,以在虚拟环境中控制机器人,并有助于了解物理构建的机器人的操作。
代码
控制速度线跟随机器人 V4 的代码
https://github.com/DrakerDG/Speed-Line-Follower-Robot/commit/12a807aed92c570dce12452064a5d6fe5053cb71示意图
制造工艺