

微型自动化六轴机器人
微型自动化六轴机器人需要多少空间?
如果您打算使用微型自动化六轴机器人手臂,例如本教程中使用的 Mecademic Meca500 作为示例,您很可能对定位和定向机器人的工具(末端执行器 ) 在
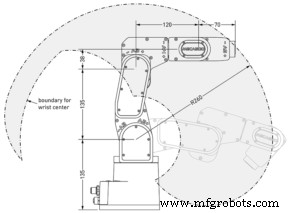 各种位置。因此,您肯定想知道安装在特定六轴机器人手臂上的特定末端执行器可以到达的位置集。您可能会要求提供某种图表,显示机器人的“工作区域”、“工作体积”、“工作范围”或“工作范围”。而且,不幸的是,您经常会看到像这里显示的那样简单的图表,或者更糟糕的是,带有所谓的reach 机器人的。
各种位置。因此,您肯定想知道安装在特定六轴机器人手臂上的特定末端执行器可以到达的位置集。您可能会要求提供某种图表,显示机器人的“工作区域”、“工作体积”、“工作范围”或“工作范围”。而且,不幸的是,您经常会看到像这里显示的那样简单的图表,或者更糟糕的是,带有所谓的reach 机器人的。在机器人技术中,您正在寻找的正确术语是工作空间 .范围不过是机器人腕中心之间的最大距离 (机器人最后三个关节轴的交点)和关节 1 的轴。上图中的灰色区域是手腕中心可达到的区域,对于给定的关节 1 旋转。这个区域,甚至通过围绕关节 1 的轴旋转该区域所扫过的体积,都不是机器人的工作空间。绝对不能保证您可以使用特定末端执行器的工具提示到达此体积中的位置,更不用说以任何方向到达该位置了。事实上,如果你安装一个相对较长的末端执行器,你将无法用你的工具尖端从这个体积到达任何位置。
微型自动化六轴机器人的工作空间是集合安装在该机器人上的特定末端执行器可获得的所有姿势(位置和方向)。因此,(1) 没有人可以告诉您特定六轴机器人手臂的工作空间是什么,除非您指定您打算使用的末端执行器是什么,并且 (2) 该工作空间是一个六维实体这通常不可能以图形方式表示。
当然,在涉及图形表示时,机器人领域也有一些例外。如下图所示的六轴笛卡尔机器人的工作空间很容易描述,但仅适用于工具提示的一种特定选择。事实上,如果机器人末端执行器的工具提示与三个旋转关节的轴的交点重合,那么这个微型自动化六轴机器人可以将其工具提示定位在黄色长方体内的任何位置,绝对是任何工具方向。
唉,出于各种实际原因,绝大多数六轴工业机器人都不是笛卡尔机器人。例如,上面的笛卡尔机器人在定位方面的工作空间非常小。典型的六轴机器人手臂,通常被奇怪地称为垂直关节机器人 ,由七个连杆(机构)组成,通过六个驱动的旋转关节串联连接。这些主体中的第一个是机器人的底座,最后一个是机器人的法兰 (也称为机械接口 ).此外,第一个关节的轴是垂直的,关节 2 和 3 的轴是水平的,关节 4 的轴垂直于关节 3 的轴,最后三个关节的轴通常相交于一点。
虽然工业机器人手臂通常在没有任何工具的情况下出售,但末端执行器(例如夹具或接触式探针)最终会连接到机器人的法兰上。然后用户必须关联一个工具参考系 ,固定在这个末端执行器上。此工具参考系是相对于法兰参考系定义的 .工具参考系的原点称为 TCP (工具中心点 ).因此,最终,您必须对与机器人的基本参考系相关的一组姿势感兴趣 , 机器人可以带一个特定的工具参考系。因此,机器人的工作空间是机器人工具参考系可达到的一组姿势。
在典型的微型自动化六轴机器人手臂中,例如我们的 Meca500,无论末端执行器如何,每个可行位置在 TCP 中,由于机械干扰、关节限制和链接长度限制,可实现的工具方向范围完全不同。除了典型六轴机器人手臂的定位和定向能力之间的高度耦合之外,这些机器人还具有所谓的奇点 .在奇点中,机器人不能在某些方向上移动。这是一个物理障碍,而不是某种数学问题,绝对所有微型自动化六轴机器人手臂(包括上面显示的笛卡尔机器人手臂)都有奇点。例如,当Meca500中所有关节都为零度时,如下左图,机器人的末端执行器不能沿着平行于基座的直线移动y -轴(绿色轴)。要沿着这条线移动,关节 4 和 6 必须先旋转 ±90°(方向相反)。
奇点是机器人技术中一个非常重要的现象(或者更确切地说是令人讨厌的现象),将在单独的教程中进行处理。在这里,足以说明即使路径在机器人的工作空间内,如上例所示,机器人的工具参考系也可能无法连续跟随它(即,TCP 的运动没有停顿) ,因为奇点。
因此,机器人的奇点进一步限制了机器人工作空间的可用部分。事实上,典型的微型自动化六轴机器人手臂的工作空间是几个无奇异点的工作空间子集的组合,由奇异点隔开。在关节模式下,机器人可以在整个工作空间内的任何地方移动,但在笛卡尔模式下(即,当它的 TCP 连续遵循特定路径时)只能在一个无奇异点的工作空间子集中移动。
这些无奇异点的工作空间子集中的每一个都对应于特定的机器人配置。这个主题将在即将到来的机器人奇点教程中讨论。现在,请注意,如果给定姿势似乎无法通过当前机器人配置访问,则可能可以通过其他配置访问。例如,下图中的工具参考系姿势只能在八种机器人配置中的一种中获得。然而,一个常见的错误是只考虑一个无奇点工作空间子集而不是整个工作空间(即,只在八种配置模式中的一种中工作)。请注意,如果您使用 x 指定姿势 , y , z 坐标和欧拉角,然后使用命令 MovePose,机器人会自动找到最佳配置。然而不幸的是,用户通常通过慢跑而不是通过指定姿势来教授机器人位置。
通常,用户已经为给定的应用程序准备了一组末端执行器姿势。例如,工件必须从传送带上取下,然后以不同的方向呈现在摄像机前,最后放置在另一条传送带上。找到相机的最佳位置、夹具的最佳安装和手指的最佳设计绝非易事。不幸的是,到目前为止,还没有商业上可用的自动程序来寻找最佳电池设计——唯一的方法是反复试验。
幸运的是,您不需要为此进行真正的设置;你可以使用像 RoboDK 这样的模拟软件。也就是说,您仍然需要一些机器人技术,否则您可能会花费大量精力进行反复试验。因此,在下文中,我们将为您提供十项指南,以充分利用机器人的工作空间。尽管我们以 Meca500 为例,但这些指南适用于任何典型的微型自动化六轴机器人手臂。
指南 1: 将您的 TCP 尽可能靠近机器人的法兰放置
在检查中,必须将零件呈现在具有大范围方向的相机前面是很常见的。在此类应用中,第一个经验法则是将工具参考系放置在尽可能靠近法兰参考系的位置。换句话说,您必须设计一个抓取系统,使您能够在尽可能靠近机器人法兰的地方抓取要检查的零件。
请注意,我们为我们的可选电动抓手提供了一个适配器板,可以让您连接如上所示的抓手。但是,对于某些应用,最好设计自己的转接板以连接夹具,使手指和关节 6 的轴在一个平面内,或者沿关节 6 的轴连接夹具(就像在这个视频中一样)。另一种选择可能是使用 L 形手指。
准则 2: 除非遵循路径,否则不要在笛卡尔模式下移动
在检查中,您经常需要以不同的方向旋转零件。当然,在这些情况下,使用命令 MoveLinRelTRF 或在笛卡尔模式下点动机器人会容易得多。但是,如果沿旋转方向存在奇点,这两种方法都会失败,如下图所示的示例所示。在该示例中,您不能围绕其 y 旋转末端执行器 -轴(绿色轴)为 90°,因为奇点(关节 4 和 6 的轴对齐)。
因此,您必须学习如何使用欧拉角并改用 MovePose 命令。或者,您可以使用 RoboDK。由于 RoboDK 是一个模拟器,它允许您以笛卡尔慢跑模式通过奇点。无论奇点如何,请始终使用 MovePose 或 MoveJoints 命令,除非您希望 TCP 遵循特定路径。使用这些命令通常会导致最快的循环时间。
准则 3: 如果电缆对关节 6 的限制太多,请对齐关节 1、4 和 6 的轴
虽然关节 6 在机械上是无限的,但如果您使用连接了电缆的末端执行器,例如我们的夹持器,则关节 6 的范围将被限制在大约 ±180° 或什至更小。如果您需要更大的范围,您可以对齐关节 4 和 6 的轴,甚至关节 1、4 和 6 的轴。当然,这样的配置将是单一的,因此您需要使用 MoveJoints 命令围绕这些旋转重合轴
准则 4: 如果您使用带电缆的末端执行器,请将关节 6 尽可能保持在零度
只要有可能,在所需的姿势下,请尽量将关节 6 保持在零度。例如,如果您在关节 6 处于 170° 的机器人位置抓取工件,然后执行 MovePose 命令,关节 6 很可能会旋转很多。例如,如果在新的所需姿势下,关节 6 可能处于 190°,机器人将自动将其最后一个关节沿负方向旋转 340°(而不是沿正方向旋转 20°)。
准则 5: 如果你需要很多方向,将你的 TCP 定位在关节 1 的轴上
如果你需要覆盖广泛的方向,那么你必须将你的 TCP 定位在关节 1 的轴上。这样的配置将允许您围绕关节 1 的轴旋转 ±175°,并围绕关节 6 的轴旋转 ±180°。机器人手腕的中心距离关节 1 越远,机器人的定向能力越差。
准则 6: 尝试所有机器人配置
有时,机器人在要获得的一个或多个末端执行器姿势中太接近奇点。在检查应用程序中,这可能不是问题,但如果您需要拾取或放置物体,那么您很可能需要以线性模式到达和离开最终姿势。在这种情况下,测试所有可能的机器人配置并选择离奇点最远的配置。例如,在下图中,左侧配置离奇点太近(轴 4 和轴 6 几乎对齐),但右侧配置离奇点足够远。
准则 7: 考虑的不仅仅是可达性
正如我们已经提到的,微型自动化六轴机器人手臂的工作空间是一组由奇点分隔的多个工作空间子集。最重要的是,并非所有可实现的姿势都同样“好”。事实上,就速度和精度等性能标准而言,六轴机器人手臂的工作空间是高度异构的。我们已经提到,在笛卡尔模式下移动时,您需要尽可能远离奇点。此外,机器人手臂伸展得越多,其精度就越低(它越灵活),并且在工具提示处抑制振动所需的时间也就越长。
准则 8: 如果您不需要六个自由度,请利用机器人的冗余度
在许多情况下,您只需要五个自由度。例如,如果您的末端执行器是涂胶器或主轴,您可能不关心将其分别围绕针轴或轴的轴定向。此外,如果您使用相机等轴对称传感器检查工件,在许多情况下,您可能能够以绕传感器轴的任意旋转方式呈现工件。在这些情况下,不要将关节 6 的轴与您的工具或传感器的对称轴对齐,并为要达到的每个姿势选择无限多个机器人位置中的最佳位置。最佳意味着远离奇点,但也最接近要获得的前后位姿。
准则 9: 除非绝对必要,否则请将您的机器人固定在直立位置
与大多数工业机器人一样,Meca500 可以安装在任何方向(例如倒置或挂在墙上)。任何非直立附件的唯一问题是您需要非常坚固的固定装置,这可能会使您的电池更加笨重和昂贵。因此,只有在尝试将机器人竖直固定后,才选择非直立附件。
准则 10: 测量七次,切割一次
英文谚语是“测量两次,切割一次”,但在机器人单元设计方面,请选择俄语版本“测量七次,切割一次”。如果您的单元相对复杂,或者您的机器人的工作空间似乎受到限制,则必须使用机器人仿真包并经历多次设计迭代,直到找到满意的解决方案。但是,不要完全依赖模拟。像 RoboDK 这样的通用模拟包不会模拟机器人的确切行为。例如,特定的线性运动在 RoboDK 中可能可行,但由于奇异性,在真实机器人上是不可能的。因此,您还必须在真实的机器人上尝试您的程序。
总而言之,除非您的应用只涉及一些重复运动,否则您必须充分了解机器人的工作空间并花费大量时间设计机器人单元。机器人单元设计不仅要能够执行所有机器人运动,还要优化循环时间和其他性能标准(精度、能耗)。
自动化控制系统